懸臂式掘進機定向掘進系統(tǒng)的設(shè)計
2021-10-21 12:29:44楊超
機械管理開發(fā) 2021年10期
楊 超
(忻州窯礦機電科,山西 大同 037003)
引言
掘進機的定向掘進是實現(xiàn)礦井掘自動化、少人化的關(guān)鍵部分,其關(guān)鍵技術(shù)在于精確獲取掘進機的坐標(biāo)位置,通過實時坐標(biāo)確定掘進機位置,目前有很多技術(shù)理論被應(yīng)用在研究掘進機定向掘進中,如基于全站儀的定向掘進技術(shù)、基于電子羅盤的定向掘進技術(shù)、基于超聲波測距儀的定向掘進技術(shù)等[1]。MEMS 即微機械系統(tǒng),其集衛(wèi)星技術(shù)、傳感器技術(shù)、控制功能等于一體,具有信息獲取、處理和執(zhí)行功能。MEMS 慣性技術(shù)不依賴任何外界輔助條件,如激光、無線電等,定位精度完全取決于元器件本身,可避免外界干擾,且可以提供位置、速度、姿態(tài)角度和航向多組數(shù)據(jù),利用該技術(shù)設(shè)計方案易于實現(xiàn)生產(chǎn)目標(biāo),且功能、精度容易滿足,有一定的實際應(yīng)用價值。
1 懸臂式掘進機掘進過程控制設(shè)計
1.1 MEMS 捷聯(lián)慣性導(dǎo)航技術(shù)
MEMS 捷聯(lián)慣性導(dǎo)航技術(shù)的核心結(jié)構(gòu)為陀螺儀和加速度針,兩者直接安裝在掘進機機體上,工作時,陀螺儀感測掘進機的角運動信息,加速度計感測掘進機的線速度信息,均為機體坐標(biāo)系下的物理量,經(jīng)坐標(biāo)轉(zhuǎn)換、解算得到掘進機的位置信息,系統(tǒng)將其與給定的位置坐標(biāo)進行比較,根據(jù)誤差控制調(diào)整掘進機工作過程,使得掘進機機身中心和設(shè)定的巷道中心線趨于一致,實現(xiàn)定向掘進,保證完整切割斷面。
1.2 掘進機構(gòu)建模
對掘進機掘進機構(gòu)進行建模時,首先要簡化其掘進機構(gòu),如圖1 所示。圖中陰影部分為掘進機的兩條履帶,其長度為B,兩履帶間寬W。掘進機的掘進過程也相應(yīng)簡化為如圖四輪形式,掘進液壓馬達為R1、R2兩個,R3、R4為兩個驅(qū)動鏈輪。可以用R1、R2兩個掘進液壓馬達控制掘進機掘進功能,圖1 也表示了掘進機掘進的初始位置,虛線表示給定的巷道中心線,要求掘進過程中掘進機機身重心與虛線保持一致[2]。掘進中,機身可繞中心O 進行360°旋轉(zhuǎn),設(shè)定順時針旋轉(zhuǎn)角度為正。

圖1 掘進機行走機構(gòu)初始位置模型圖

1.3 巷道中心線建模
掘進機掘進過程中,絕大多數(shù)的巷道中心線設(shè)定都是圓弧和直線的組合。在對圓弧巷道進行切割掘進時,如果對中心線不做處理,掘進機掘進就會比較困難。因此對圓弧巷道切割軌跡建模,如下頁圖2所示,假設(shè)設(shè)定的中心線為y=f(x),離散化巷道中心線,A、B、C、…為離散點,連接相鄰離散點,以線段代替原中心線,讓掘進機掘進時按離散線段掘進,此時,掘進機掘進過程中位置和方向會有一些變化,只要對這些變化及時調(diào)整,使掘進機中線點與下一離散線段保持同一直線方向,以此方式掘進,可很好地控制掘進機掘進方向和質(zhì)量[3]。
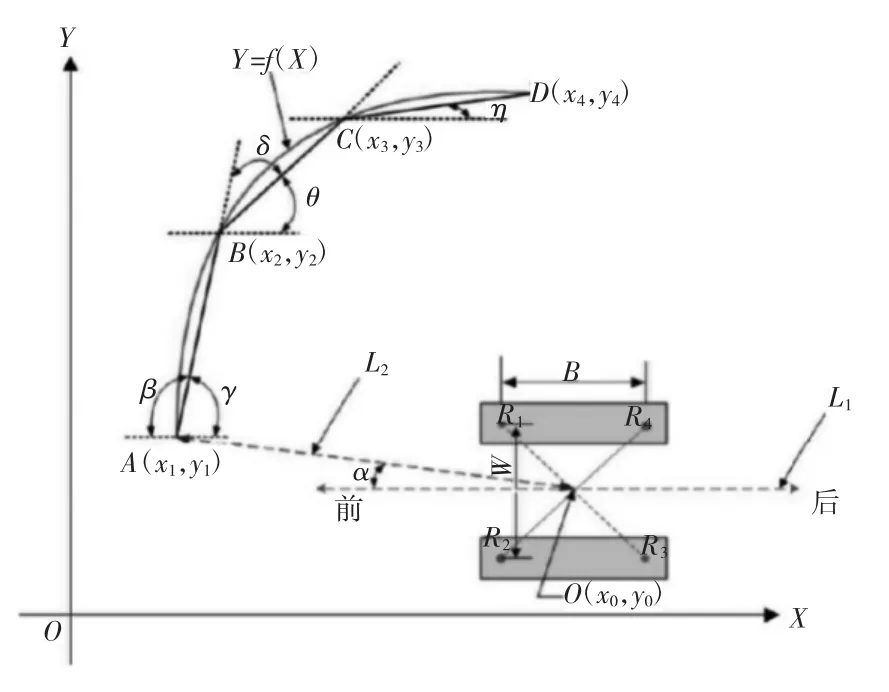
圖2 巷道中心線離散模型圖
1.4 掘進過程建模
掘進機在掘進過程中,機身中心線會與巷道離散中心線發(fā)生一定偏離。圖2 也可以看出掘進機由初始位置走向A 點的線路,在掘進過程中,由O 點向A 點掘進,掘進機掘進前姿態(tài)需要調(diào)整,保證機身中心線指向A 點,即L2直線,因此掘進機需要旋轉(zhuǎn)如圖α 角,設(shè)驅(qū)動鏈輪行走的距離為LA,可知:

假設(shè)驅(qū)動鏈輪半徑為r,減速比為I,馬達容積率為δ,q 為液壓馬達的排量,則驅(qū)動鏈輪行走LA的距離消耗液壓馬達流量為:

可知下次從A 到B 掘進時,掘進機需要再次進行位姿調(diào)整,調(diào)整過程為,首先旋轉(zhuǎn)一定角度,然后掘進一定行程,之后再旋轉(zhuǎn)一定角度,進而可推導(dǎo)出在任何一點的旋轉(zhuǎn)角度和所需流量為:

2 馬達流量控制設(shè)計
重點運用電液比例閥器件進行馬達流量控制設(shè)計,電液比例閥可以接收控制器發(fā)送來的電信號,進而控制掘進機的液壓流量,從而對掘進機掘進進行控制,控制過程如圖3 所示。首先上位機處理器接收到陀螺儀和加速度計感測到的掘進機位置數(shù)據(jù),經(jīng)處理對比得到偏差,根據(jù)偏差計算出調(diào)整位置所需的液壓馬達流量,此時電動機、齒輪泵、比例電磁閥至液壓馬達回路開始工作,調(diào)節(jié)掘進機的左右行走液壓馬達對偏差進行糾正[4]。

圖3 馬達流量控制過程設(shè)計
3 掘進仿真
仿真軟件選用MATLAB,通過前文建模可知掘進機行走過程可視為曲線和直線的組合,直線掘進過程簡單易實現(xiàn),此處僅對圓弧段進行仿真研究。離散圓弧段巷道中心線,離散點為n,連接相鄰兩離散點確定一個內(nèi)接弦長,用若干段弦長代替圓弧段,實際中應(yīng)適度離散化,選擇合理的點數(shù)。設(shè)定n=5、20,則掘進示意圖如圖4 所示。

圖4 離散點為5、20 時掘進巷道示意圖
由圖4 可知,離散點越多,掘進軌跡越接近于理想巷道中心線,切割斷面時,斷面的完整性更高、誤差更小,實際工程中,還應(yīng)根據(jù)工程具體精度要求,選擇合適的離散點數(shù)。
4 結(jié)論
1)對捷聯(lián)慣性導(dǎo)航技術(shù)主要結(jié)構(gòu)陀螺儀和加速度計作用進行說明。
2)對掘進機行走機構(gòu)、巷道中心線、掘進過程建模,并進行馬達流量控制器設(shè)計,深入分析掘進機掘進過程,通過建模得出角度與液壓馬達流量的關(guān)系,由感測元件測得的實際位置數(shù)據(jù)與設(shè)定數(shù)據(jù)的偏差確定糾偏需要的馬達流量,結(jié)合馬達控制器作用對掘進機掘進過程糾偏。
3)利用MATLAB 軟件進行路徑仿真,主要對巷道中心線進行離散化建模,可知離散化點數(shù)越多,運行軌跡控制效果越好,實際應(yīng)用中可根據(jù)精度要求設(shè)定合適的離散點數(shù)。
該系統(tǒng)有利于精準(zhǔn)控制掘進機按規(guī)定巷道定向掘進,可實現(xiàn)掘進機的遠程控制,提高掘進機的自動化和少人化性能,從而改善礦井工作人員的工作環(huán)境,降低勞動強度,增加作業(yè)安全性。
