一種雷達探測波形精細化設計方法
2021-10-21 11:55:50杜天有
現代導航 2021年5期
關鍵詞:設計
杜天有,于 濛
(中國電子科技集團公司第二十研究所,西安 710068)
0 引言
三坐標相控陣雷達一般需要在方位、俯仰兩維空域內進行目標的快速搜索和截獲。從雷達設計者的角度看,希望雷達具有很高的天線增益,保證雷達探測威力,但是若天線增益增大,必然會出現波束寬度變窄,進而導致搜索特定空域需要的波位數變多,雷達搜索數據率不能滿足要求。
對于三坐標相控陣雷達,時間資源非常寶貴。相控陣天線波束的快速掃描能力和探測波形的快速變化能力,使相控陣雷達的工作方式具有多樣性,為雷達完成多種功能、實現多種工作方式提供了靈活性和自適應調節能力[1-2]。如何充分利用相控陣雷達的這一特點,根據探測任務、工作方式進行精細化設計,節省時間資源,是三坐標相控陣雷達設計的一個關鍵點。
本文結合某雷達系統的總體設計方案,根據三坐標相控陣雷達在俯仰維探測目標在空域分布的典型特點,提出一種探測空域和波形精細化設計方法,在保證雷達正常搜索范圍的前提下,雷達時間資源節省效果非常明顯,具有很好的工程應用價值。
1 探測模型建立
1.1 對空探測空域覆蓋模型
假設雷達探測高度為ht,雷達架設高度為hr,地球半徑為Re,可建立如圖1 所示模型[4-5]。
圖1 中A點為雷達架設點,B、C點為雷達對空波束與探測高度等高線的交點;O為地心;雷達對空最大探測距離為R;波束與雷達架設位置的地平面夾角為θ。
從圖1 可以看出,當雷達探測高度隨仰角增大,高度增大。當超過某個仰角時,雷達探測覆蓋范圍的部分區域位于雷達探測高度ht之上,如圖陰影部分所示。根據雷達探測高度需求,這部分區域為非雷達探測的必須覆蓋區域,因此在雷達設計時可對高仰角區域采取更小的脈沖重復周期,縮減雷達探測范圍,則可有效地節省雷達時間資源。在設計時,可根據仰角波位分布,計算出每個仰角波位對應的最大探測距離(等高線以下空域),然后進一步計算每個波位的脈沖重復周期即可。
在該模型中,雷達探測高度ht,雷達架設高度hr,地球半徑為已知變量Re,雷達探測斜距為需要求解的變量。根據三角形余弦定理,在△ABO中存在以下幾何關系:
式中,OB=Re+ht,OA=Re+hr,AB為雷達探測斜距。
1.2 對地探測空域覆蓋模型
同理可得到對地探測空域覆蓋模型如圖2 所示。
在該模型中,雷達架設高度hr,地球半徑Re為已知變量,雷達探測斜距為需要求解的變量。根據三角形余弦定理,在△ABO中存在以下幾何關系:
式中,OB=Re,OA=Re+hr,AB為雷達探測斜距。
1.3 探測波位分布
假設在俯仰維的3 dB 波束寬度為θ,俯仰維搜索波束排布按照3 dB 交疊進行設計,則每個波束在俯仰維的覆蓋范圍如圖3 所示,波束上沿和下沿與探測等高線存在不同交點A和C,為了保證波束整體覆蓋范圍,對空探測波束需要按照波束下沿計算其最大探測斜距。
根據天線口徑,按3 dB 交疊空域覆蓋進行波位設計,俯仰維19 個波位,詳細分布如表1 所示。
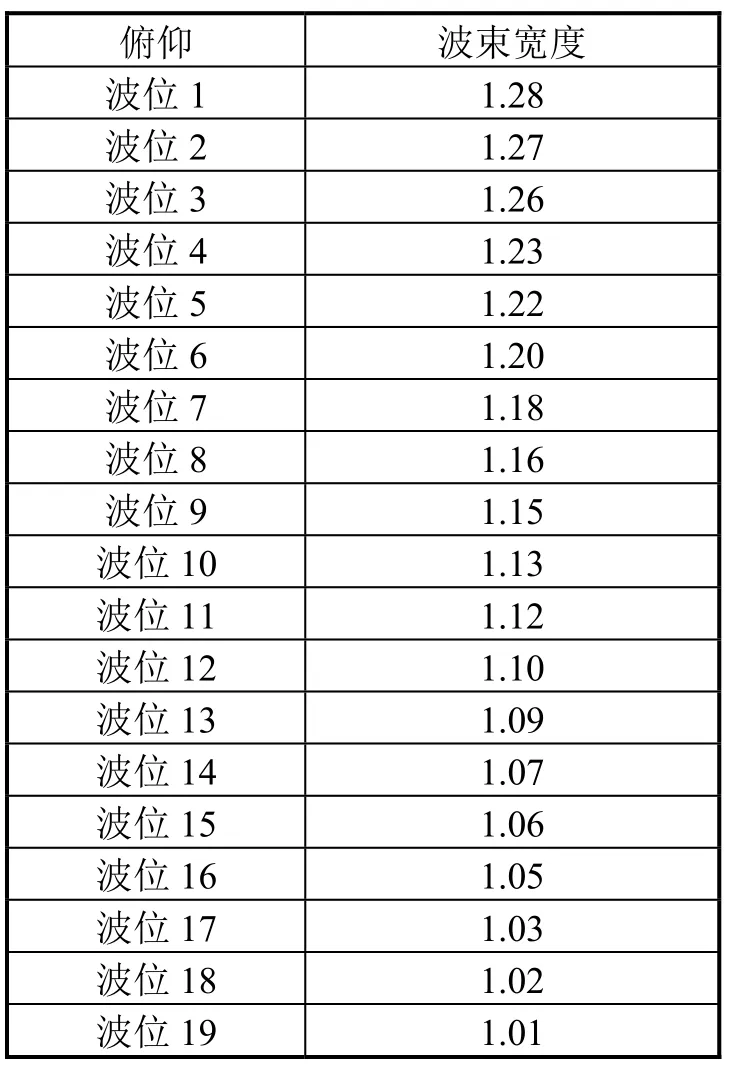
表1 雷達俯仰維波束寬度(單位:°)
對地探測波束需要按照波束上沿計算其最大探測斜距。如圖4 所示,左側為對地探測的探測距離,右半部分是對空探測的探測距離。
2 探測空域仿真計算分析
根據第1 節中的對空探測模型,進行典型場景下的模型量化仿真計算分析。
2.1 對空探測空域仿真
假設雷達典型架高為10 m、50 m、100 m、200 m,探測高度ht為1000 m,俯仰維波束寬度如表1 所示,則根據式(1)進行求解得到每個對空探測波束的探測距離,如表2 所示。表中仰角為每個俯仰波束中心與水平面夾角,架高為雷達的幾種典型架設高度,距離為波束下沿與探測等高線的交點到雷達的探測斜距。
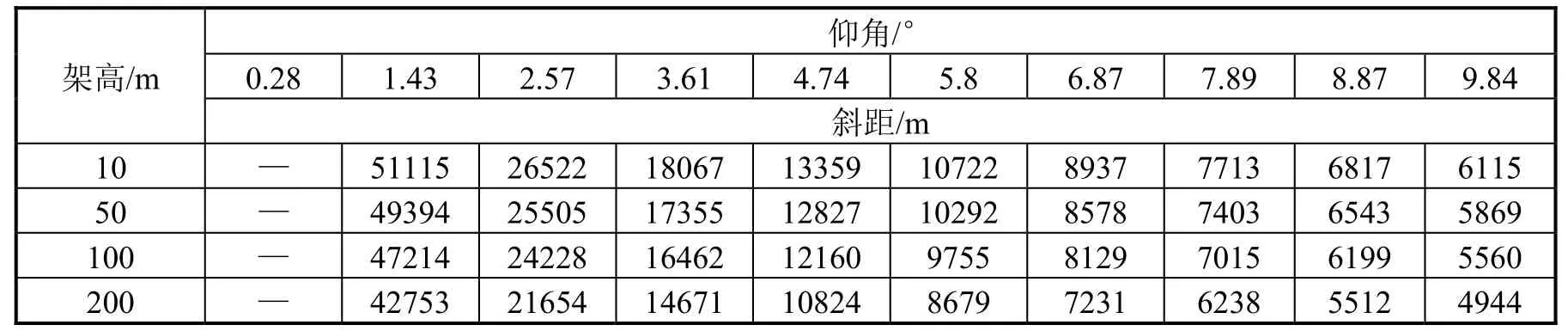
表2 對空探測波束探測距離計算值
從實際仿真計算結果可以看出:
(1)在同一架設高度下,隨著仰角增大,探測斜距越來越小;
(2)隨著雷達架設高度的增大,同一仰角波束的探測斜距越來越小;
(3)波位1(0.28°)由于波束下沿已是負角度,與探測等高線無交點,故無解,實際設計時按照最大探測距離進行設計即可。
2.2 對地探測空域仿真
假設雷達典型架高為10 m、50 m、100 m、200 m,則根據式(2)進行求解得到每個對地探測波束的探測距離,如表3 所示。表中仰角為每個俯仰波束中心與水平面夾角,架高為雷達的幾種典型架設高度,距離為波束上沿與地面交點到雷達的探測斜距。
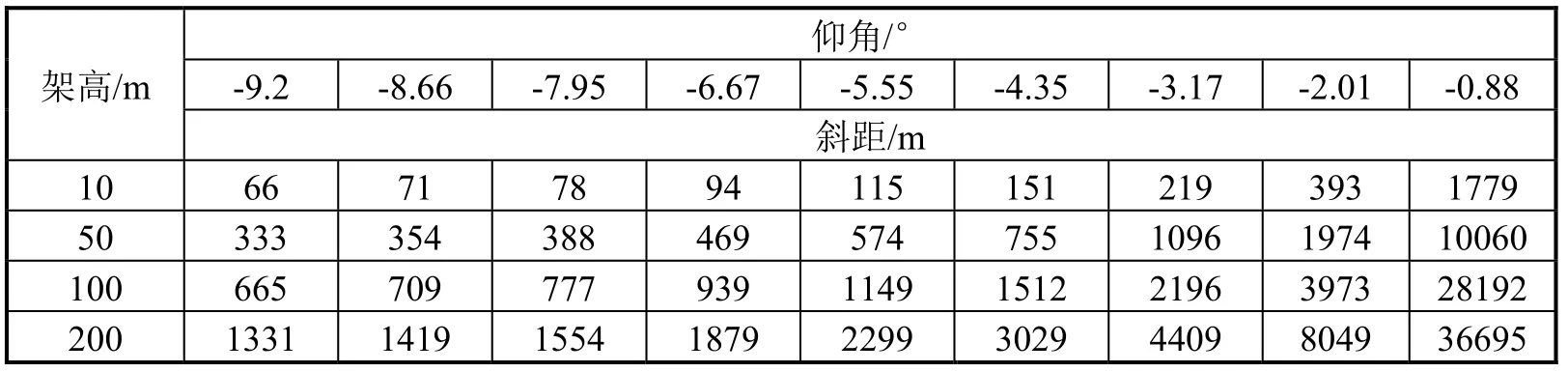
表3 對地探測波束探測距離計算值
從實際仿真計算結果可以看出:
(1)在同一架設高度下,隨著仰角增大,探測斜距越來越大;
(2)隨著雷達架設高度的增大,同一仰角波束的探測斜距越來越大。
2.3 脈沖重復周期精細化設計
脈沖重復周期T精細化設計需要同時滿足以下準則:
(1)保證滿足雷達探測覆蓋范圍要求,并適當留取時間余量;
(2)滿足雷達最大工作占空比要求(對于脈沖雷達)。
根據探測空域要求,對每一個俯仰波束進行精細化設計工作重復周期。假設雷達發射脈寬τ=10μs,最大工作占空比要求η=20%,雷達指標要求對空目標探測最大距離為15 km,對地面目標探測最大距離為20 km。
根據第1 節可得到第i個俯仰波位的最大探測斜距Ri,則脈沖重復周期Ti需要滿足如式(3)所示:Ti在滿足上述條件的基礎上,適當地增大取值,其中探測距離按不同架高條件取探測距離的極值進行計算。即對空按架高10 m 時的實際探測距離計算重復周期,對地按架高200 m 時的實際探測距離計算重復周期,以便確保不同架設高度下該方案的適用性。計算結果如表4 和表5 所示。

表5 架高200 m 對地探測波束探測量程與重復周期設計
仰角分成若干區間,對每一個區間設計一種波形和重復周期。這樣既可以適當增加探測距離余量,也可以減少重復周期Ti的種類數目,降低設計復雜度。
上述設計用于實現雷達最大威力時的時間資源優化。對于時間資源的得益計算僅包含雷達搜索波形中的寬脈沖周期,不包含補盲脈沖周期以及收發切換時間。
2.4 時間資源得益分析
根據上述計算結果可看到,相比按照最大探測距離計算,多數波位的重復周期Ti明顯縮小,如圖5 和圖6 所示。
圖6中耗時比K為優化后重復周期T2與優化前重復周期T1的比值。
優化前雷達對覆蓋空域進行一次搜索遍歷所需的時間為2450μs(假設單周期駐留,19 個波位),優化后一次搜索遍歷所需1455μs。可以看到優化后搜索時間為優化前搜索時間的60%,節省了40%的時間資源。
3 結論
文中提出了一種三坐標雷達探測空域和波形的精細化設計方法,通過對每個俯仰波位進行雷達工作波形參數優化設計,能夠有效降低雷達搜索占用的時間資源,提高雷達搜索的數據率,對三坐標雷達的優化設計具有重要意義。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
