基于風(fēng)光數(shù)據(jù)驅(qū)動不確定集合的配電網(wǎng)與多微網(wǎng)魯棒經(jīng)濟調(diào)度
2021-10-20 02:11:54張宇威肖金星楊軍徐冰雁李蕊李勇匯
電力建設(shè) 2021年10期
張宇威,肖金星,楊軍,徐冰雁,李蕊,李勇匯
(1.武漢大學(xué)電氣與自動化學(xué)院,武漢市 430072;2.國網(wǎng)上海市電力公司,上海市 200122)
0 引 言
近年來,隨著能源供需矛盾、氣候變化和環(huán)境問題日益加劇,發(fā)展可再生能源成為未來能源系統(tǒng)的主要要求之一[1]。微網(wǎng)(microgrid,MG)作為集成各類分布式發(fā)電系統(tǒng)的有效形式,解決了大規(guī)模可再生能源的集成應(yīng)用問題。多微網(wǎng)(multiple microgrids,MMGs)針對區(qū)域內(nèi)鄰近的分布式發(fā)電機組、MG和負荷的能量管理進行協(xié)調(diào),不但可以降低MG對配電網(wǎng)(distribution network,DN)運行安全性的不利影響,而且可以提高可再生能源的消納率[2]。由于DN與MMGs是包含多個利益主體以及多種不同類型分布式機組的耦合系統(tǒng)[3],如何在考慮可再生能源不確定性的前提下,兼顧各方利益,實現(xiàn)配電網(wǎng)與多微網(wǎng)系統(tǒng)可靠、經(jīng)濟運行調(diào)度是目前亟需解決的重要問題。
隨著以風(fēng)電、光伏為代表的可再生能源接入量的不斷增加,其不確定性會給配電網(wǎng)與多微網(wǎng)系統(tǒng)運行的可靠性、經(jīng)濟性帶來較大的挑戰(zhàn)[4]。目前針對配電網(wǎng)與多微網(wǎng)系統(tǒng)中可再生能源不確定性的處理方法主要包括隨機優(yōu)化模型[5-6]、機會約束優(yōu)化模型[7-8]、魯棒優(yōu)化模型[9-14]等。文獻[5]采用隨機優(yōu)化,以拉丁超立方采樣來產(chǎn)生隨機場景,并采用同步回代削減法來縮減場景。文獻[8]采用機會約束優(yōu)化來描述可再生能源的不確定性問題,將旋轉(zhuǎn)備用約束以概率形式描述。然而,隨機優(yōu)化方法需要實際工程中難以獲得的隨機因素的概率分布或者較多的數(shù)據(jù)樣本,且計算速率和結(jié)果受場景數(shù)量的影響;機會約束方法由于其復(fù)雜的概率密度函數(shù),其非凸約束難以同時保證求解效率和全局最優(yōu)性。此外,這2種方法均難以保證調(diào)度的完全魯棒性。
隨著國家碳中和、碳達峰的發(fā)展趨勢,配電網(wǎng)與多微網(wǎng)中風(fēng)、光等可再生能源、電動汽車等滲透率越來越高,電網(wǎng)的運行方式越來越復(fù)雜多變,使得電網(wǎng)出現(xiàn)極限運行場景的風(fēng)險急劇增加[10]。魯棒優(yōu)化作為一種處理不確定性的方法,由于考慮了不確定性集合中的最壞情況,相較于其他方法具有較高的魯棒性,在配電網(wǎng)與多微網(wǎng)系統(tǒng)調(diào)度中能夠有效應(yīng)對極限運行場景。文獻[11]研究了不確定性條件下考慮多利益相關(guān)者的多微電網(wǎng)能量調(diào)度問題,并建立了微網(wǎng)魯棒調(diào)度模型。文獻[12-14]考慮多種主體以及可再生能源不確定性,通過分布式魯棒優(yōu)化方法來解決配電網(wǎng)與多微網(wǎng)系統(tǒng)的分布式調(diào)度問題。
上述文獻均采用基于區(qū)間集合的魯棒優(yōu)化方法處理可再生能源的不確定性,存在以下不足:1)忽略了可再生能源出力的時空相關(guān)性。考慮到微網(wǎng)中風(fēng)電和光伏等可再生能源地理位置接近,在各時段都具有較強的相關(guān)性[15],因此忽略可再生能源的相關(guān)性會導(dǎo)致調(diào)度決策中考慮了實際發(fā)生概率非常低的出力場景,使得調(diào)度決策過于保守,從而導(dǎo)致調(diào)度經(jīng)濟性較差。2)上述基于區(qū)間集合的魯棒優(yōu)化模型,在求解時需要通過拉格朗日對偶原理將子問題進行轉(zhuǎn)化,使得求解過程較為復(fù)雜,經(jīng)濟性也不理想。
本文提出一種考慮風(fēng)光出力時空相關(guān)性的配電網(wǎng)與多微網(wǎng)數(shù)據(jù)驅(qū)動魯棒調(diào)度方法。通過分布式調(diào)度算法,分別建立配電網(wǎng)與微網(wǎng)的調(diào)度模型;針對微電網(wǎng)中風(fēng)光出力的不確定性與時空相關(guān)性,采用最小體積封閉橢球(minimum volume enclosing ellipsoid,MVEE)數(shù)據(jù)驅(qū)動算法構(gòu)建風(fēng)光出力不確定集合,建立微網(wǎng)數(shù)據(jù)驅(qū)動魯棒調(diào)度模型;采用基于極限場景的列約束生成(column-and-constraint generation,C&CG)算法將微電網(wǎng)魯棒調(diào)度問題拆分成主子問題進行求解,子問題不需要采用對偶方法,只需求解各個極限場景下的微電網(wǎng)實時調(diào)度問題;采用目標級聯(lián)分析法(analytical target cascading,ATC)對配電網(wǎng)與多微網(wǎng)調(diào)度問題進行整體求解。仿真結(jié)果表明所提方法能夠在保證配電網(wǎng)與多微網(wǎng)調(diào)度魯棒性的同時,提高系統(tǒng)調(diào)度的經(jīng)濟性。
1 配電網(wǎng)與多微網(wǎng)分布式調(diào)度框架
本文研究的配電網(wǎng)與多微網(wǎng)系統(tǒng)模型如圖1所示。配電網(wǎng)通過變壓器從上游主網(wǎng)購電,微網(wǎng)側(cè)通過風(fēng)光機組以及可控機組發(fā)電,兩網(wǎng)之間通過聯(lián)絡(luò)線進行電能雙向交互,以實現(xiàn)配電網(wǎng)與多微網(wǎng)經(jīng)濟調(diào)度最優(yōu)。針對配電網(wǎng)與多微網(wǎng)的整體建模,目前已有相關(guān)研究[16-17]采用分布式建模方法將配電網(wǎng)與微網(wǎng)進行分別建模,從而提高計算效率。對此,本文提出一種配電網(wǎng)與多微網(wǎng)分布式優(yōu)化調(diào)度框架,將配電網(wǎng)與多微網(wǎng)作為多個利益主體,分別建立調(diào)度模型,在各系統(tǒng)進行調(diào)度決策時僅通過彼此內(nèi)部的部分信息交互,分布式實現(xiàn)各自的最優(yōu)調(diào)度。配電網(wǎng)與多微網(wǎng)的調(diào)度框架為:
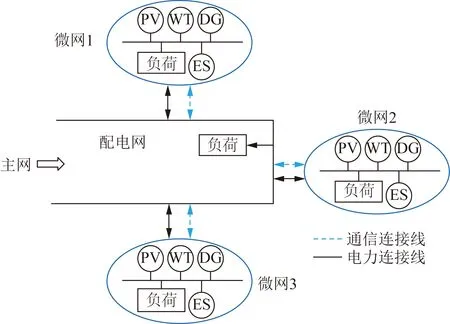
圖1 配電網(wǎng)與多微網(wǎng)結(jié)構(gòu)Fig.1 Structure of DN and MMGs
(1)
式中:fDN、fMG分別為配電網(wǎng)與微網(wǎng)的經(jīng)濟調(diào)度目標函數(shù);xDN為配電網(wǎng)自身的調(diào)度決策變量,包括向主網(wǎng)購電功率、線路電流等;xCO為配電網(wǎng)與微網(wǎng)的耦合調(diào)度變量,指配電網(wǎng)與微網(wǎng)交互功率;xMG為微網(wǎng)自身調(diào)度變量,包括機組出力計劃、儲能充放電計劃等;D(·)、E(·)分別為配電網(wǎng)調(diào)度的不等式約束和等式約束;G(·)、H(·)分別為微網(wǎng)調(diào)度的不等式約束和等式約束。
該優(yōu)化問題為一個雙層優(yōu)化問題,包括配電網(wǎng)層以及微網(wǎng)層,層之間通過耦合變量進行聯(lián)系。本文首先建立配電網(wǎng)和微網(wǎng)調(diào)度模型,再采用ATC算法對整體模型進行求解。
1.1 配電網(wǎng)調(diào)度模型
配電網(wǎng)調(diào)度以滿足自身負荷需求為前提,確定日前最優(yōu)主網(wǎng)購電方案以及與微電網(wǎng)交互功率,其目標函數(shù)為總運行成本最小。
1.1.1配電網(wǎng)調(diào)度目標函數(shù)
(2)

1.1.2約束條件
(3)
(4)
(5)
(6)
(7)
(8)
(9)

在配電網(wǎng)約束中,式(3)—(6)為配電網(wǎng)潮流約束,式(7)、(8)為線路電流、節(jié)點電壓上下限約束。式(5)為非凸約束,可將其轉(zhuǎn)為二階錐約束:
(10)
1.2 微網(wǎng)日前-實時二階段魯棒調(diào)度模型
1.2.1微網(wǎng)調(diào)度目標函數(shù)
針對微網(wǎng)內(nèi)風(fēng)光可再生能源的不確定性,本文提出一種微網(wǎng)兩階段魯棒調(diào)度模型,調(diào)度包括日前和實時2個階段,日前階段基于風(fēng)光出力場景制定日前調(diào)度方案,實時階段考慮風(fēng)光出力的不確定性,基于日前階段方案進行實時調(diào)整,以實時調(diào)度成本最小為目標確定各單元的出力實時調(diào)整策略。微網(wǎng)調(diào)度模型目標函數(shù)為:
(11)
式中:Ω1、Ω2、Ω3分別為日前調(diào)度決策變量集合、風(fēng)光出力不確定性變量集合和實時調(diào)度決策變量集合;COk表示微網(wǎng)k日前階段的調(diào)度成本;CRk表示微網(wǎng)k實時調(diào)度成本。
(12)
(13)
(14)
(15)
(16)
(17)
(18)
(19)
(20)
(21)
(22)
(23)

1.2.2日前調(diào)度約束
1)燃氣輪機日前備用容量約束。
根據(jù)文獻[18]可知,由于實時出力計劃會帶來不便,燃氣輪機機組需要在日前制定預(yù)出力計劃以及機組的上下備用容量。
(24)
(25)
2)燃氣輪機最小啟動/關(guān)閉時間約束。
(26)
(27)

(28)

(29)
3)聯(lián)絡(luò)線功率傳輸約束。
(30)
1.2.3實時調(diào)度約束
1)燃氣輪機出力爬坡約束。
(31)
式中:RUk、RDk分別為燃氣輪機機組的最大爬坡和滑坡功率。
2)微電網(wǎng)功率平衡約束。

(32)

3)儲能充放電容量約束。
(33)
4)棄風(fēng)、棄光以及失負荷約束。
在風(fēng)電與光伏出力向上波動較大的極端場景中,若儲能容量有限,則需要棄風(fēng)棄光以維持功率平衡[10,19]。此外,本文在調(diào)度中考慮可中斷負荷,在極端場景下可切除小部分可中斷負荷[10,19]以滿足功率平衡。
(34)
(35)
(36)

5)燃氣輪機出力最大/最小值約束。
(37)
6)燃氣輪機出力實時調(diào)控約束。
在實時調(diào)度中,考慮可再生能源出力的不確定性,燃氣輪機的實時出力可能會偏離日前計劃出力,其實時出力調(diào)整可由式(38)—(39)計算。
(38)
(39)
2 基于數(shù)據(jù)驅(qū)動魯棒優(yōu)化的不確定集合描述
1.2節(jié)中的微網(wǎng)二階段魯棒調(diào)度問題是考慮風(fēng)光不確定集合Ω2中最惡劣場景的調(diào)度問題。不確定集合Ω2的構(gòu)建會影響調(diào)度問題的魯棒性和經(jīng)濟性。本節(jié)在1.2節(jié)的基礎(chǔ)上構(gòu)建風(fēng)光數(shù)據(jù)驅(qū)動不確定集合,從而建立微網(wǎng)數(shù)據(jù)驅(qū)動魯棒調(diào)度模型。
2.1 數(shù)據(jù)驅(qū)動不確定集構(gòu)建
目前在針對微電網(wǎng)中可再生能源不確定性的魯棒優(yōu)化研究均采用區(qū)間不確定集合對不確定變量進行描述[11-14],然而區(qū)間不確定集合忽略了不確定變量之間的相關(guān)性;。風(fēng)電以及光伏出力的區(qū)間不確定集合只由各自歷史場景中的最大和最小出力決定,忽略了風(fēng)光的相關(guān)性。若用區(qū)間集合對其進行描述,會過多考慮不可能發(fā)生的場景,為額外應(yīng)對這些場景必然會增加調(diào)度成本。
與區(qū)間不確定集合相比,橢球更適用于模擬非均勻的數(shù)據(jù)集,其兼顧了每個變量的不同方差和變量間的協(xié)方差(即變量間的相關(guān)性)。一般橢球集合的表達式為E={(ω-c)Tθ-1(ω-c)≤1},其中c為橢球中心;θ為經(jīng)加權(quán)的變量協(xié)方差,反映變量之間的相關(guān)性;ω為風(fēng)-光歷史出力矩陣。橢球不確定集合可以調(diào)整長短軸以及偏移角度適應(yīng)不同相關(guān)性的數(shù)據(jù)[20]。
針對橢球不確定集合的構(gòu)建,MVEE算法[21]根據(jù)不確定變量歷史數(shù)據(jù)的分布情況,采用數(shù)據(jù)驅(qū)動方法構(gòu)建一個能夠包裹所有歷史數(shù)據(jù)的最小體積橢球不確定集合,該集合能夠描述風(fēng)-光出力的時空相關(guān)性,其包圍的不確定性出力空間更小,保守性也更小。圖2為單時段風(fēng)-光區(qū)間及橢球不確定集合對比。
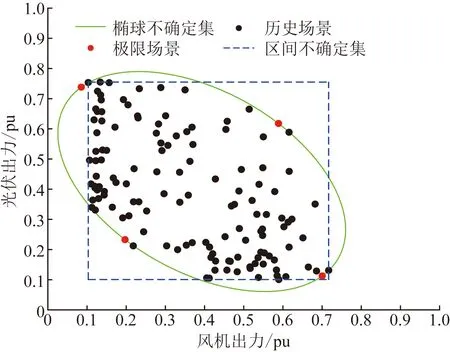
圖2 風(fēng)光區(qū)間不確定集以及橢球不確定集Fig.2 The cubic set and the ellipsoid set
數(shù)據(jù)驅(qū)動不確定集合的構(gòu)建方法如下[22]:
步驟1:根據(jù)歷史數(shù)據(jù)構(gòu)建風(fēng)-光歷史出力矩陣ω。假設(shè)區(qū)域內(nèi)共有Nw個風(fēng)電機組,Np個光伏電站,將所收集的風(fēng)-光出力歷史數(shù)據(jù)按天進行劃分,設(shè)所收集到的歷史數(shù)據(jù)的天數(shù)為Ns。ω的表達式可寫為:
(40)
步驟2:基于數(shù)據(jù)驅(qū)動的高維橢球集合構(gòu)建。基于MVEE數(shù)據(jù)驅(qū)動算法,構(gòu)建一個高維的橢球來包裹所有的歷史場景。
(41)
式中:ρ為常數(shù),代表(Nw+Np)T維的單位球體的體積;Q為橢球的對稱軸相對坐標軸的偏離方向。
式(41)可以采用lift-and-project算法進行求解[21]。最終得到高維橢球的表達式為:
E(Q,c)={ω∈R(Nw+Np)T|(ω-c)TQ(ω-c)≤1}
(42)
式(42)所描述的(Nw+Np)T維橢球不確定集合共有2(Nw+Np)T個頂點。
步驟3:求解模型,得到橢球集合的頂點坐標。首先,對Q進行正交化分解:Q=PTDP=P-1DP,記D=diag(λ1,λ2,…,λ(Nw+Np)T),P為變換矩陣。為得到高維橢球?qū)?yīng)的頂點,將該橢球旋轉(zhuǎn)平移,使其對稱軸與坐標軸重合,該旋轉(zhuǎn)變化方程為:
ω′=P×(ω-c)
(43)
E′(D)={ω′∈R(Nw+Np)T|ω′TQω′≤1}
(44)
(45)
式中:ω′為旋轉(zhuǎn)后頂點的坐標值;E′(·)為旋轉(zhuǎn)后得到的高維橢球表達式;ω′e,1,…,ω′e,Ne為旋轉(zhuǎn)后的高維橢球頂點坐標;Ne為頂點的個數(shù)。
得到高維橢球E頂點ωe,i坐標,從而建立基于橢球頂點的數(shù)據(jù)驅(qū)動不確定集合[22]。
2.2 微網(wǎng)二階段數(shù)據(jù)驅(qū)動魯棒優(yōu)化模型
綜合1.2節(jié)微網(wǎng)二階段調(diào)度模型以及2.1節(jié)所述的數(shù)據(jù)驅(qū)動集合,可以建立微網(wǎng)二階段數(shù)據(jù)驅(qū)動魯棒調(diào)度模型,其矩陣表示如式(46)所示。凸優(yōu)化中極值必然存在于多面體空間的頂點處[23-24],所以數(shù)據(jù)驅(qū)動魯棒優(yōu)化的極限場景位于橢球頂點處。對于已確定的日前調(diào)度變量x∈Ω1,只要調(diào)整實時調(diào)度變量y∈Ω3能適應(yīng)所有極限場景ωe,h,那么就可以保證調(diào)度的魯棒性。
(46)
式中:h為極限場景編號;A、B為系數(shù)矩陣;G(·)、H(·)分別為微網(wǎng)調(diào)度的不等式約束和等式約束。
3 模型求解
3.1 微網(wǎng)數(shù)據(jù)驅(qū)動魯棒調(diào)度模型求解
式(46)的微網(wǎng)二階段魯棒調(diào)度模型為三層優(yōu)化問題,無法直接求解。傳統(tǒng)的C&CG算法通過將原問題拆分成為主子問題迭代求解[18],主問題為求解多個極限場景下最優(yōu)決策問題,子問題則是通過拉格朗日對偶求解max-min問題,然而對偶轉(zhuǎn)換會使得求解過程較為復(fù)雜。
考慮數(shù)據(jù)驅(qū)動不確定集合的特性,本文提出一種基于極限場景的改進C&CG算法。改進C&CG算法主問題為求解多個極限場景下最優(yōu)日前調(diào)度策略,子問題則是通過極限場景法來尋找在當前日前調(diào)度方案下的最惡劣場景,并通過添加最惡劣場景的實時調(diào)度約束條件到主問題,影響主問題決策。另外,由式(42)可知,當不確定變量為n時,基于橢球頂點的數(shù)據(jù)驅(qū)動不確定集合的極限場景數(shù)為2n,相對于極限場景數(shù)為2n的區(qū)間不確定集合能夠有效降低求解負擔(dān),可以采用枚舉極限場景的方法求解子問題。相對于常規(guī)的采用對偶原理的C&CG算法,該方法中每個極限場景下的子問題均為不包含整數(shù)變量的線性調(diào)度問題,可以并行求解,相對簡單。
改進C&CG算法主問題的形式為:
(47)
式中:n為當前C&CG算法迭代次數(shù);η表示主問題極限場景中微電網(wǎng)的最大實時調(diào)度成本;wh為第h次迭代時選取的極限場景;ywh為極限場景wh下實時調(diào)度決策變量;ωe,wh為極限場景wh下不確定變量取值。
改進C&CG算法子問題的形式為:
(48)

基于極限場景法的改進C&CG算法步驟如下:
步驟1:設(shè)定下界LB=-∞,上界UB=+∞,算法迭代次數(shù)n=1。



數(shù)據(jù)驅(qū)動魯棒優(yōu)化算法流程如圖3所示。
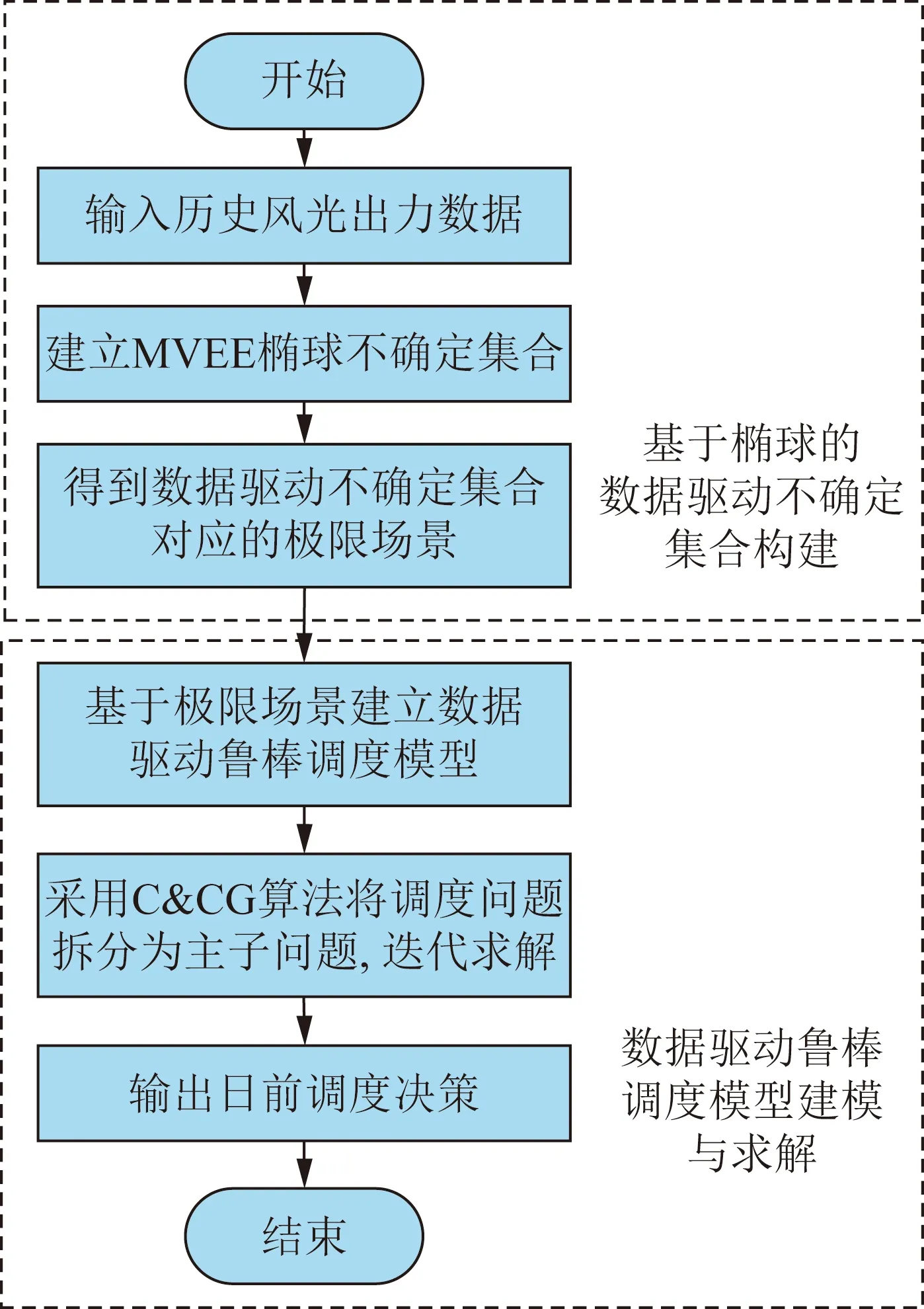
圖3 數(shù)據(jù)驅(qū)動魯棒優(yōu)化算法流程Fig.3 Flow chart of the data-driven robust optimization method
3.2 配電網(wǎng)-多微網(wǎng)整體模型分布式求解

ATC方法求解配電網(wǎng)-多微網(wǎng)整體調(diào)度模型步驟如下:

(49)
(50)
步驟4:對配電網(wǎng)和微電網(wǎng)的多次優(yōu)化迭代,直至滿足收斂判據(jù)[8]。
假設(shè)配電網(wǎng)與多微網(wǎng)系統(tǒng)中共有3個微網(wǎng),則配電網(wǎng)與多微網(wǎng)系統(tǒng)整體求解流程如圖4所示。
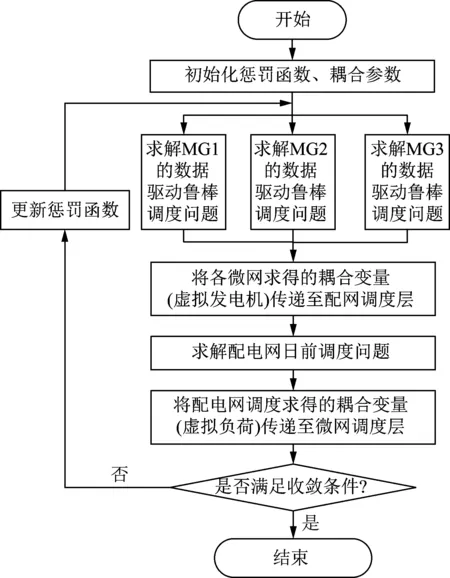
圖4 基于ATC的配電網(wǎng)與多微網(wǎng)系統(tǒng)調(diào)度流程Fig.4 Flow chart of dispatch solving based on ATC
4 仿真分析
采用IEEE 33節(jié)點配電網(wǎng)以及3個微電網(wǎng)進行仿真驗證,其拓撲如附圖A1所示。其中MG1為居民型微網(wǎng),MG2為商業(yè)型微網(wǎng),MG3為工業(yè)型微網(wǎng),均包含1臺風(fēng)機、1臺光伏、1臺微型燃氣輪機以及1臺儲能設(shè)備,峰值負荷均為1.3 MW,這3類微網(wǎng)具有不同的負荷曲線,具體如附圖A2所示[26]。MG1、MG2、MG3接入的風(fēng)機與光伏容量均為500 kW。微電網(wǎng)通過聯(lián)絡(luò)線與配電網(wǎng)節(jié)點連接,聯(lián)絡(luò)線功率傳輸最大值為500 kW。配電網(wǎng)節(jié)點1通過變壓器從主網(wǎng)購電,配電網(wǎng)的單位網(wǎng)損成本為0.6元/(kW·h)。微型燃氣輪機機組的接入容量均為800 kW,出力成本系數(shù)參考文獻[18]。削減負荷的懲罰成本為6元/(kW·h),棄風(fēng)和棄光懲罰成本為0.6元/(kW·h)[26]。燃氣輪機日前上下備用容量成本為0.3元/(kW·h),實時向上和向下再調(diào)度成本分別為0.3元/(kW·h)[20]。各微網(wǎng)的儲能設(shè)備容量均為600 kW,最大充放電功率為200 kW,充放電效率為0.9。微電網(wǎng)與配電網(wǎng)購售電單價參考文獻[27]。
考慮光伏只在白天出力[28],設(shè)置仿真時間為12 h。采用瑞士地區(qū)風(fēng)電和光伏出力的歷史數(shù)據(jù)作為仿真數(shù)據(jù)集[29]。
為驗證所提方法的有效性,通過MATLAB軟件進行建模,并利用Gurobi算法包進行計算。
4.1 優(yōu)化結(jié)果分析
實際C&CG算法迭代所用的數(shù)據(jù)驅(qū)動不確定集合的極限場景如附圖A3、A4所示,其中S1、S2、S3、S4為C&CG算法在4次迭代中選取的4個風(fēng)光出力極限場景。作為對比,采用區(qū)間集合的傳統(tǒng)魯棒調(diào)度模型進行調(diào)度時,其C&CG算法迭代中選擇的極限場景見附圖A5、A6所示。可以看出,區(qū)間不確定集合的極限場景位于風(fēng)光出力的極值點處,且存在較多可再生能源出力爬坡極大的極限場景,然而考慮到可再生能源出力的時空相關(guān)性,這種惡劣情況出現(xiàn)的概率較小。而數(shù)據(jù)驅(qū)動不確定集合的極限場景考慮了可再生能源出力的時空相關(guān)性,降低了不確定集合的保守性。
圖5為配電網(wǎng)日前調(diào)度決策情況,其中微網(wǎng)虛擬負荷為正表示微網(wǎng)向配電網(wǎng)買電,反之則表示微網(wǎng)向配電網(wǎng)售電,可以看出,配電網(wǎng)向主網(wǎng)的購電功率曲線較為平穩(wěn)。其中,居民型微網(wǎng)MG1和商業(yè)型微網(wǎng)MG2在09:00—17:00時段用電負荷較大,從配電網(wǎng)購電功率較大。而工業(yè)型微網(wǎng)在白天電價較高時段用電負荷較少,將多余的電能出售給配電網(wǎng)。
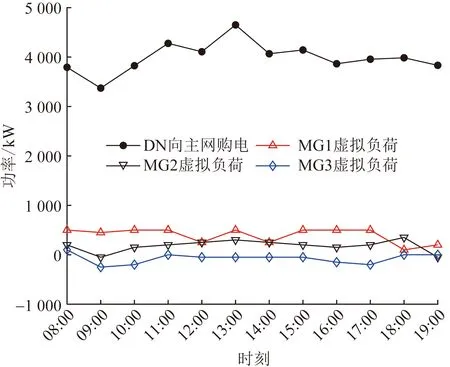
圖5 配電網(wǎng)日前調(diào)度方案Fig.5 Day-ahead dispatching scheme of DN
圖6為微網(wǎng)燃氣輪機的日前預(yù)出力值以及日前向上和向下備用容量。整體來看,為滿足微網(wǎng)負荷需求,所有微電網(wǎng)中的燃氣輪機日前預(yù)出力較高,同時為防止發(fā)生大規(guī)模棄風(fēng)、棄光情況,所有燃氣輪機的向下備用容量要高于向上備用容量。從時段上看,燃氣輪機在風(fēng)光場景中出力都較大的13:00—15:00時段,為防止出現(xiàn)大規(guī)模棄風(fēng)以及棄光現(xiàn)象,可控機組的向下備用容量顯著高于其他時段。可以看出,多微網(wǎng)系統(tǒng)主要通過控制可控機組的日前備用容量來處理可再生能源不確定性。
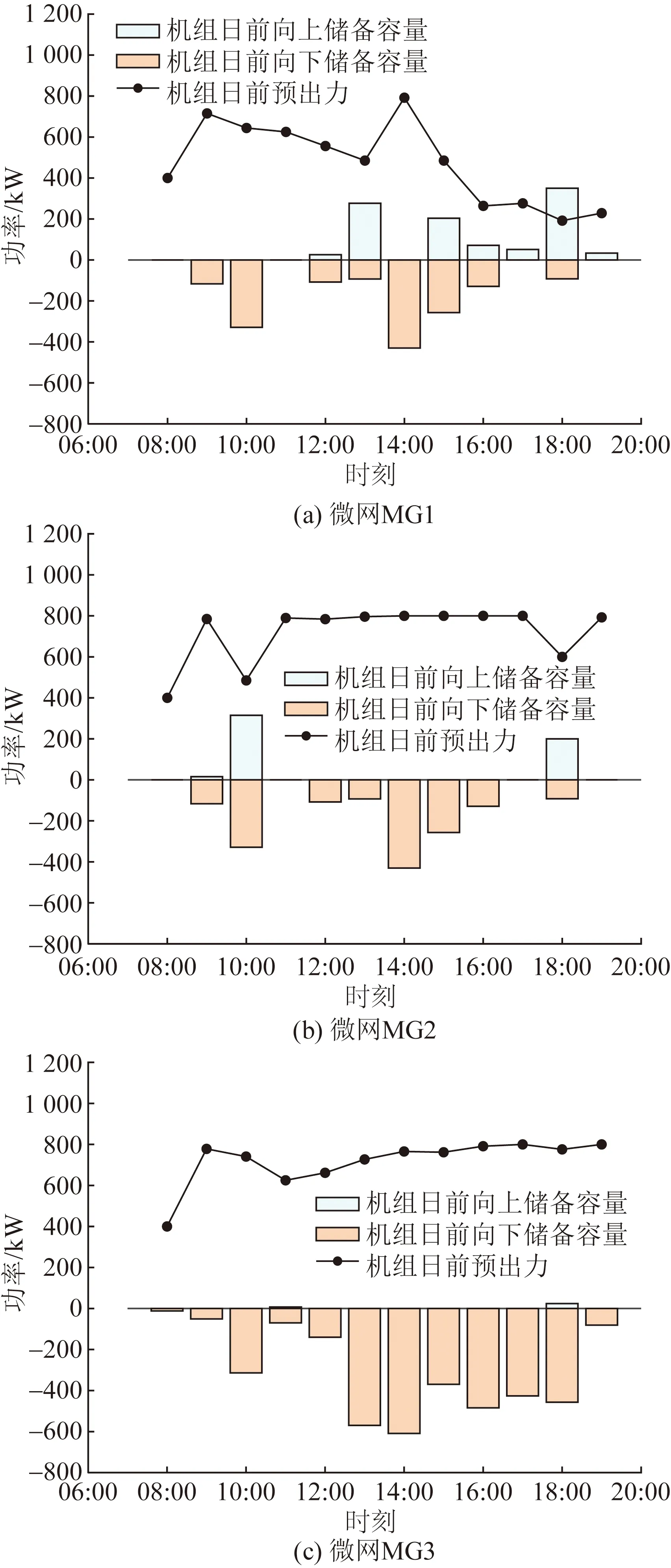
圖6 各微網(wǎng)中燃氣輪機機組日前預(yù)出力與備用容量Fig.6 Day-ahead scheduled output and reserve capacity of MT in MG
本文提出的ATC算法收斂曲線如圖7所示,經(jīng)過6次迭代實現(xiàn)快速收斂。此外,該算法基于歷史數(shù)據(jù)進行建模,可以通過離線計算得到系統(tǒng)日前調(diào)度策略。在實時階段求解系統(tǒng)每個實際場景下再調(diào)度的時間約為0.2 s(CPU i3 7100),可以滿足系統(tǒng)運行調(diào)度的需求。
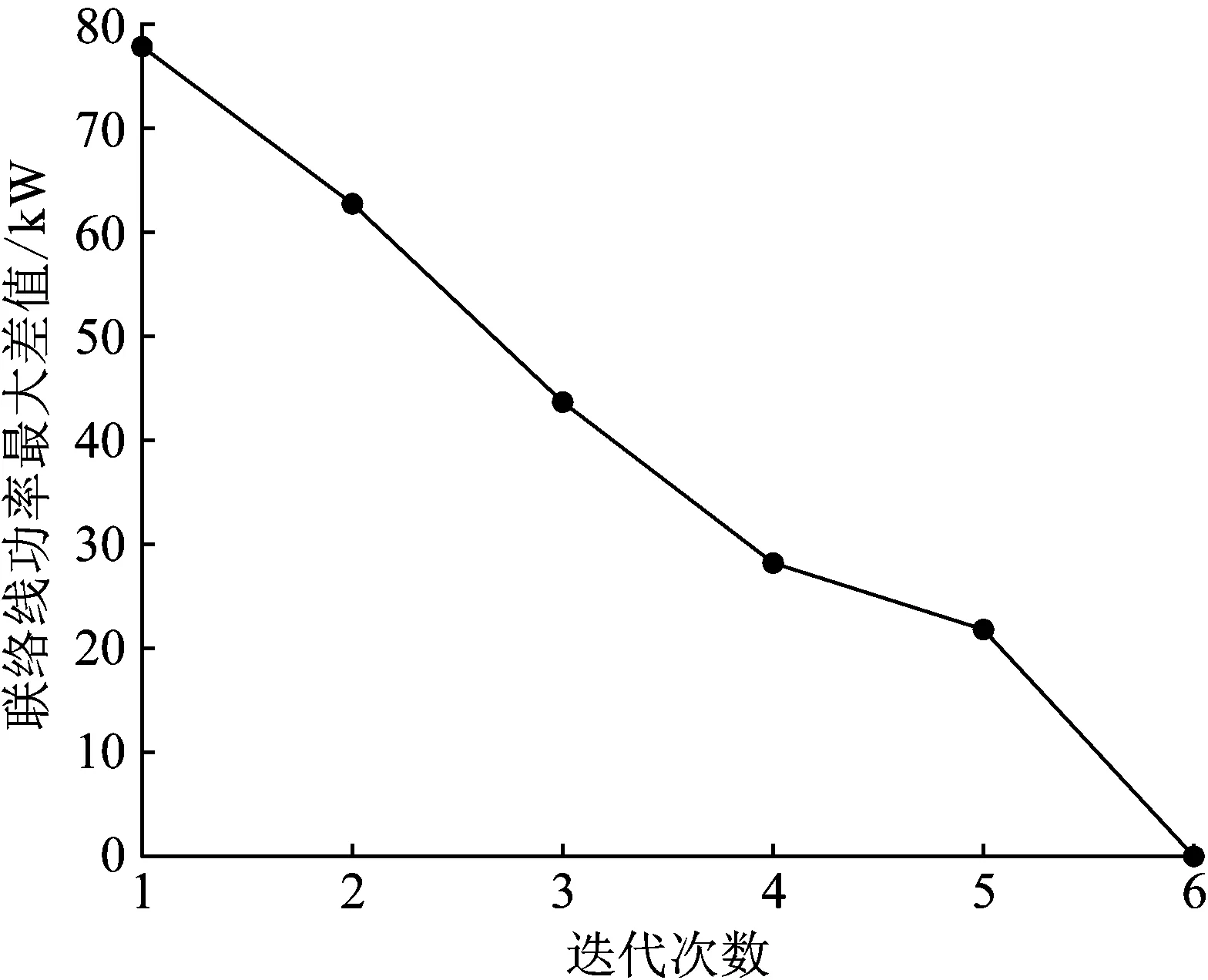
圖7 ATC算法迭代收斂曲線Fig.7 The iterative convergence curve of ATC
4.2 魯棒算法對比
為更好地說明本文所提考慮風(fēng)光相關(guān)性的數(shù)據(jù)驅(qū)動魯棒調(diào)度模型的有效性,將其與其他采用區(qū)間集合的魯棒調(diào)度模型進行對比驗證,具體如下:
場景1:采用本文所提魯棒調(diào)度模型。
場景2:采用區(qū)間集合的傳統(tǒng)魯棒調(diào)度模型[30]。
場景3:采用區(qū)間集合的可調(diào)魯棒優(yōu)化調(diào)度模型[13]。
采用100組風(fēng)光歷史出力場景進行驗證,不同算法的配電網(wǎng)、多微網(wǎng)調(diào)度成本對比如表1、2所示。其中平均成本和最大成本分別表示所有測試場景中該項成本的平均值和最大值。平均成本主要反映了調(diào)度的經(jīng)濟性指標,最大成本反映了調(diào)度的魯棒性指標。多微網(wǎng)的平均成本和最大成本均為所有微網(wǎng)成本之和。

表1 不同優(yōu)化算法下的配電網(wǎng)調(diào)度成本優(yōu)化對比Table 1 Comparison of DN dispatch cost under different optimization methods 元

表2 不同優(yōu)化算法下的多微網(wǎng)調(diào)度成本優(yōu)化對比Table 2 Comparison of MMGs dispatch cost under different optimization methods 元
從對比結(jié)果可以看出:1)所有測試場景下配電網(wǎng)調(diào)度成本基本相同,可見可再生能源接入微網(wǎng)的情況下其出力不確定性對配電網(wǎng)調(diào)度的影響較小。2)從多微網(wǎng)最大總調(diào)度成本來看,本文算法的總調(diào)度成本最大值較傳統(tǒng)魯棒優(yōu)化算法以及可調(diào)魯棒調(diào)度算法的成本小,可以看出本文魯棒性較強。3)從多微網(wǎng)平均總調(diào)度成本可以看出,本文所提方法的總調(diào)度成本平均值顯著低于其他2種算法,可以提高配電網(wǎng)與多微網(wǎng)系統(tǒng)調(diào)度的經(jīng)濟性。
總體來說,本文所提的配電網(wǎng)與多微網(wǎng)數(shù)據(jù)驅(qū)動算法相比于采用區(qū)間集合的魯棒調(diào)度方法,其優(yōu)越性體現(xiàn)在能夠在保證調(diào)度魯棒性的同時,提高調(diào)度的經(jīng)濟性。
5 結(jié) 論
本文提出了一種考慮風(fēng)光時空相關(guān)性的配電網(wǎng)與多微網(wǎng)數(shù)據(jù)驅(qū)動魯棒調(diào)度算法。首先采用分布式調(diào)度算法分別建立配電網(wǎng)日前調(diào)度模型以及微電網(wǎng)日前-實時二階段調(diào)度模型;考慮微網(wǎng)中風(fēng)光不確定性以及相關(guān)性,通過數(shù)據(jù)驅(qū)動算法建立風(fēng)-光數(shù)據(jù)驅(qū)動不確定集合,建立微網(wǎng)二階段魯棒調(diào)度模型,提出基于極限場景的C&CG算法進行求解。最后采用ATC算法進行配電網(wǎng)與多微網(wǎng)分布式求解。通過算例得到以下結(jié)論:
1)基于數(shù)據(jù)驅(qū)動方法捕捉風(fēng)-光出力的時空相關(guān)性,建立了風(fēng)-光數(shù)據(jù)驅(qū)動不確定集合。該集合相對于區(qū)間不確定集合降低了保守性。
2)提出了一種考慮風(fēng)-光相關(guān)性的配電網(wǎng)與多微網(wǎng)系統(tǒng)數(shù)據(jù)驅(qū)動魯棒調(diào)度方法,從而得到配電網(wǎng)與多微網(wǎng)的最優(yōu)日前調(diào)度決策。算例結(jié)果表明所提的調(diào)度模型可以在保證系統(tǒng)調(diào)度魯棒性的前提下,進一步提高日前調(diào)度和實時調(diào)度的經(jīng)濟性。
3)本文所提的配電網(wǎng)與多微網(wǎng)系統(tǒng)數(shù)據(jù)驅(qū)動魯棒調(diào)度方法能夠?qū)崿F(xiàn)有效收斂,從而滿足系統(tǒng)運行調(diào)度的需求。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
經(jīng)濟技術(shù)協(xié)作信息(2018年32期)2018-11-30 01:43:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
電子制作(2016年23期)2016-05-17 03:54:05
電測與儀表(2016年5期)2016-04-22 01:14:14
河南電力(2016年5期)2016-02-06 02:11:24
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年13期)2015-04-09 11:57:38