新型電力鐵塔攀爬機器人的設計及攀爬步態分析
2021-10-20 10:48:48莊紅軍高宏力魯彩江
機械設計與制造 2021年10期
關鍵詞:機械
劉 帥,莊紅軍,高宏力,魯彩江
(1.貴州電網有限責任公司畢節供電局,貴州 畢節551700;2.西南交通大學機械工程學院,四川 成都610031)
1 引言
為確保高壓輸電線路穩定運行,需要定期檢測和維護電力系統。人工檢測輸電線路時需要攀爬電力鐵塔,該方法工作效率低,有高空墜落的風險[1,2]。因此,電力鐵塔攀爬機器人的研制迫在眉睫[3,4]。它不僅能提高效率、降低高空墜落風險,而且可在不影響供電的情況下進行作業,具有廣泛的應用前景。
目前,針對電力鐵塔攀爬機器人的研究都未能推廣應用。四川大學的陸小龍等人對電塔攀爬機器人進行了較多研究,設計了一種機械夾持機構[5]。后期他們又設計了一種直線推桿機構[1]。哈爾濱工業大學的科研團隊模仿昆蟲蠕動設計了一種電磁吸附攀爬機器人[6]。總的來看,運動方式主要為步進式和蠕動跨越式,靜態定位方式主要為機械夾持式和磁吸附式。機械夾持式能穩定夾持,但結構復雜,夾持器通用性差:磁吸附式結構簡單,但穩定性有待提高。此外,如何跨越電力鐵塔上螺栓區等障礙物也是研究難點之一。現階段的設計中,機器人夾持對象都是電力鐵塔的角鋼,尚未將角鋼上的腳釘加以利用,利用腳釘攀爬能避開角鋼上的眾多障礙,具有研究價值。
這里參考了尺蠖攀爬步態,創新性地以角鋼上的腳釘為夾持對象,采用機械電磁復合手爪的夾持方式,設計了一種新型電力鐵塔攀爬機器人并對攀爬步態進行了分析。機械電磁復合手爪結構簡單,可以在不光滑的角鋼表面實現穩定夾持。以腳釘為夾持對象的機器人遵循設計的攀爬步態進行攀爬時,可以避開螺栓區、節點板等障礙物,解決了避障這一難題。
2 機器人攀爬對象的選取
電力鐵塔一般由4根尺寸較大的主材角鋼和一些用于斜拉支撐的輔材角鋼構造而成[7]。主材與地基常呈80°傾角布置,布局較為簡單:而輔材為各種角度的斜拉布置。主材與輔材、輔材之間都采用螺栓直接連接或者通過節點板連接而成。
沿著角鋼棱線攀爬時,機器人運動過程中重心落在角鋼上,運動較穩定,因此,選擇棱線進行攀爬。如圖1所示,電力鐵塔的一條主材上設有腳釘供電力工人攀爬,腳釘在角鋼兩側交替且均勻分布,腳釘伸出的長度遠大于障礙物高度,以腳釘作為夾持對象,將大大簡化機器人結構,解決越障難題。

圖1 電力鐵塔Fig.1 Electric Power Tower
綜上,這里以主材角鋼為攀爬對象,以主材角鋼上的腳釘為夾持對象,沿角鋼棱線攀爬。
3 攀爬機器人的機械結構設計
這里參考尺蠖攀爬步態設計了機器人主體,創新性地以鐵塔角鋼上的腳釘為夾持對象,設計了機械電磁復合手爪。
3.1 主體機械結構設計
攀爬機器人主體,如圖2所示。包括前腕關節、中間關節、后腕關節三個轉動關節,依照關節將其分為前手爪、前臂、后臂、后手爪。前臂裝有攝像頭用來觀察工作環境并將其傳輸至地面,后臂上的電池可以為機器人提供電能,實現機器人離地工作。

圖2 攀爬機器人模型Fig.2 Model of Climbing Robot
如圖3所示,前、后腕關節分別由單獨的電機直接驅動,調節前、后手爪的俯仰角度。中間關節的運動由安裝在后臂內部的電機驅動,電機通過齒輪帶動絲桿轉動,螺母沿著絲桿上下移動,中間關節驅動桿位置的變化可以改變兩臂的夾角,即利用電機的正反轉調節中間關節的角度大小。

圖3 攀爬機器人內部結構Fig.3 Internal Structure of Climbing Robot
3.2 機械電磁復合手爪的設計
現階段靜態定位主要分為機械夾持和磁吸附兩種方式,機械夾持穩定性好,但結構復雜,電磁鐵吸附結構簡單,但夾持不穩定。綜合兩者的優點,這里設計了一種機械電磁復合手爪。
手爪主要包括糾偏裝置、足架、電磁鐵和機械爪,結構如圖4所示。足架一端與機器人的前后臂相連,另一端連接電磁鐵和機械爪。手爪前端的糾偏裝置呈90°,可與角鋼兩側面完全貼合起到導向作用,當手爪輕微偏離角鋼棱線時,也可起到糾偏作用。電磁鐵選用條形電磁鐵,兩電磁鐵呈90°且與角鋼兩側面貼合。手爪兩側各有一個機械爪,左右完全對稱。因為主材角鋼上的腳釘左右交替分布,對稱設計可保證必有一側的機械爪夾持在腳釘上,同電磁鐵與角鋼的兩個接觸點共同構成一個三角形,保證了夾持的可靠性。手爪夾持狀態,如圖5所示。

圖4 機械電磁復合手爪Fig.4 Mechanism-electromagnetism-combined Gripper

圖5 手爪夾持狀態Fig.5 Clamping State of Gripper
機械爪由齒條、齒條外殼、夾爪、連桿和定位桿組成,采用對稱設計,如圖6(a)所示。機械爪的開合由齒輪齒條機構實現,安裝在足架上的電機帶動齒輪轉動,齒輪帶動兩個齒條同時向外移動,夾爪張開松開腳釘,反之則夾爪閉合夾住腳釘:連桿和定位桿的主要作用是對腳釘進行定位,定位桿一端與夾爪鉸接,另一端與連桿通過銷連接,連桿另一端與齒條外殼鉸接,銷能在定位孔中自由滑動。如圖6(b)所示,夾爪閉合過程中,銷沿定位孔向外滑動,帶動定位桿向內閉合,夾爪夾住腳釘時,定位桿的圓弧狀末端剛好與腳釘完全貼合并將其定位。
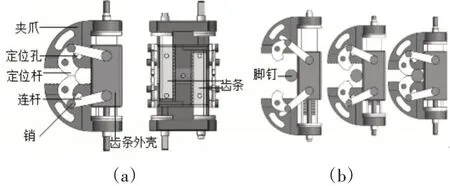
圖6 手爪上的機械爪Fig.6 The Clamper on the Gripper
3.3 關鍵受力部件有限元分析
為了保證機器人安全可靠地工作,對足架和中間關節驅動桿兩個關鍵受力部件利用Workbench進行有限元分析。兩個部件均采用6061鋁合金,取安全系數為2,則許用應力為27.6MPa。網格劃分采用四面體法并指定網格大小為1mm。
足架:在足架與機械爪的接觸面添加固定約束,在足架與臂連接的孔內施加重力載荷。如圖7所示,足架最大形變量為0.009mm,最大應力4.814MPa<27.6MPa,滿足強度要求。

圖7 足架位移云圖及應力云圖Fig.7 Deformation and Stress Figure of Gripper Frame
中間關節驅動桿:在驅動桿下端孔添加固約束,在上端的孔內施加重力載荷。如圖8所示,最大形變量為0.550mm,可以安全工作:最大應力19.433MPa<27.6MPa,滿足強度要求。

圖8 中間關節驅動桿位移云圖及應力云圖Fig.8 Deformation and Stress Figure of Connecting Rod
根據有限元分析結果,可以看出機器人的機械結構設計滿足強度要求,可以安全工作,設計合理。
4 機器人攀爬步態分析
攀爬機器人的首要任務就是攀爬電力鐵塔,以腳釘為攀爬對象可以避開螺栓區、節點板等障礙物,故只需考慮攀爬步態。機器人需要調整前腕關節、中間關節、后腕關節三者協調運動才能實現機器人的攀爬功能,因此有必要對機器人的攀爬運動進行運動學建模,并且進行相應的運動學分析與仿真。
4.1 攀爬步態設計
攀爬步態的設計是機器人運動學分析的基礎,機器人攀爬步態如圖9所示。

圖9 機器人攀爬步態示意圖Fig.9 Climbing Gait of Climbing Robot
Step1:機器人前后手爪電磁鐵通電,機械爪閉合,前手爪緊緊夾持在2號腳釘上,后手爪夾持在1號腳釘上;
Step2:后手爪夾持狀態不變,前手爪電磁鐵斷電且機械爪張開,前、后腕關節以及中間關節協調配合運動,使得前手爪松開2號腳釘,離開電力鐵塔并向上邁動;
Step3:前手爪夾持到3號腳釘上,前手爪電磁鐵通電且機械爪閉合,此時,機器人前后手爪緊緊夾持在腳釘上;
Step4:前手爪夾持狀態不變,后手爪電磁鐵斷電且機械爪張開,前、后腕關節以及中間關節協調配合運動,使得后手爪松開1號腳釘,離開電力鐵塔并向上邁動;
Step5:后手爪夾持到2號腳釘上,后手爪電磁鐵通電且機械爪閉合,此時,機器人前后手爪緊緊夾持在腳釘上;
至此,機器人完成了一個攀爬步驟,以此循環。
4.2 攀爬運動學模型的建立
攀爬過程中,典型姿態為后手爪夾持在角鋼上,前手爪騰空,以機器人后腕關節為基坐標系進行D-H建模[8]。這里采用改進D-H參數法建立連桿坐標系[9],如圖10所示。

圖10 攀爬機器人D-H模型Fig.10 D-H Model of Climbing Robot
通過建立連桿坐標系得到D-H參數表,如表1所示。

表1 D-H參數表Tab.1 D-H Parameter Table
4.3 攀爬運動學分析
根據圖10連桿坐標系建立連桿i對連桿i-1相對位置的齊次變換矩陣

展開,得
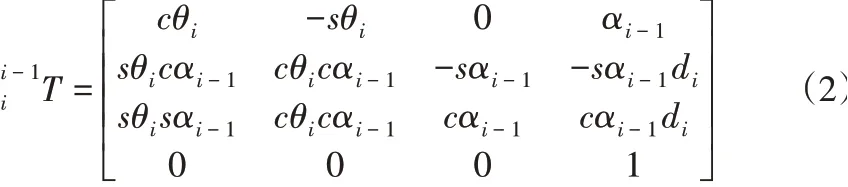
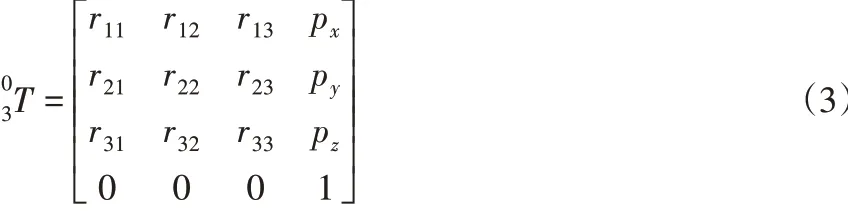
其中,

方程(3)構成攀爬機器人的運動學方程。
4.4 攀爬運動學模型的驗證
采用的驗證方法為給定關節的變量值,代入運動學方程中求解相應位姿坐標,再代入Robotics Toolbox求解相應位姿坐標,若結果相等,則運動學模型正確,否則模型錯誤。
對各關節變量賦值:θ1=π/3,θ2=-2π/3,θ3=-π/6,代入式(3)得出機器人前手爪相對于基坐標系的位姿r11=0,r12=1,
在Robotics Toolbox中建立一個3自由度機械臂模型,命名為“攀爬機器人”。定義初始位姿為[π/3,-2π/3,-π/6],得到如圖11(a)所示的運動學模型。調用fkine()函數進行正運動學分析,可得機器人前手爪相對于基坐標系的位姿矩陣為:

圖11 攀爬機器人運動學仿真Fig.11 Kinematics Simulation of Climbing Robot

式(4)與運動學方程求得的解一致,故運動學模型正確。
4.5 攀爬運動學仿真
機器人初始位置的關節變量為[π/3,-2π/3,-π/6],終止位置關節變量為[π/6,-π/3,-π/3]。在Robotics Toolbox生成3個關節的位移、速度、加速度曲線[10],如圖11(b)、(c)、(d)所示。
可以看出:攀爬機器人在攀爬過程中各個關節運行平穩,曲線平滑,不存在奇異點。而且,機器人各關節在攀爬過程中沒有剛性沖擊和柔性沖擊,滿足機器人的控制要求,設計合理。
5 結論
針對危險系數高的電力鐵塔作業,這里設計了一種新型電力鐵塔攀爬機器人并且分析了攀爬步態。創新性地將電力鐵塔角鋼上的腳釘作為夾持對象,采用機械電磁復合手爪,簡化了機械結構。然后通過Workbench對關鍵受力部件進行有限元分析,利用MATLAB里的Robotics Toolbox驗證了改進D-H參數法所建攀爬運動學模型的正確性并且進行了運動學仿真,結果證明了機器人機械結構以及攀爬步態設計合理,為軌跡規劃和動力學研究奠定了基礎。新型電力鐵塔攀爬機器人提高了夾持穩定性,解決了避障難題,在攀爬過程中各個關節運行平穩,無剛性沖擊和柔性沖擊。攀爬機器人可以保障電力工人的人身安全,提高電力檢測的效率,具有廣泛的應用前景。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
