永磁同步電機控制自動代碼生成的研究
2021-10-20 10:41:04吳政江李建貴黃玉祥
機械設計與制造 2021年10期
吳政江,李建貴,黃玉祥
(1.武漢理工大學機電工程學院,湖北 武漢430070;2.湖北江山重工有限責任公司,湖北 襄陽441057)
1 引言
由于永磁同步電機具有效率高、調速范圍大、體積小、發熱小等優點,現已廣泛應用在新能源汽車上,隨著新能源汽車制造技術的飛速發展,對PMSM性能的控制要求也越來越高,人們也越來越要求新能源汽車的安全性、可操作性和特定功能,這對于汽車嵌入式系統的開發也就越來越嚴格[1]。為了滿足不同電動汽車上的控制需求,如今已將很多智能控制算法應用到了電機控制中,并取得了很好的控制效果。
控制算法的推陳出新對其嵌入式代碼實現提出了很大的挑戰,同時電機控制代碼的規模和復雜度將成倍增加。傳統的嵌入式系統開發與控制算法是分開設計與實現的,仿真模型調試成功后需要手工編寫控制代碼,這樣的開發方式不僅效率低下,而且魯棒性也差。
采用基于模型開發的方法(MBD)可以有效降低電機控制算法開發的難度,在MATLAB環境下通過建模和仿真來獲得從需求到設計、實現和測試,使系統模型成為開發過程的核心。基于所選控制算法在Simulink環境下搭建控制系統仿真模型,按照功能要求進行配置優化后,將仿真模型轉化為嵌入式代碼生成模型再自動生成目標程序代碼,在整個過程中不需要手動編寫程序,這明顯提高了開發效率。傳統電機控制嵌入式系統開發模式與基于模型開發方法的對比如表1所示[2]。
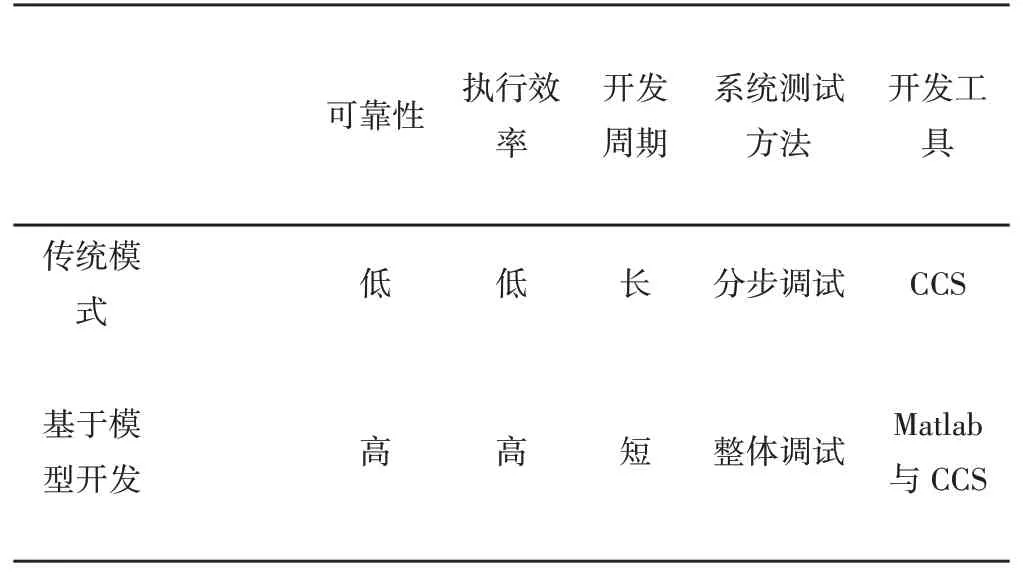
表1 傳統開發模式與基于模型開發方法的對比Tab.1 Comparison Between Traditional and Model-Based Development Method of Embedded System Model
現采用MBD的方法,以基于模糊自適應PID控制算法的永磁同步電機控制系統為例說明其開發流程。首先介紹了MBD電機控制系統開發流程,其次介紹了模糊自適應PID控制算法原理及Matlab模糊控制器的設計,在Simulink中建立了基于該算法的PMSM矢量控制模型,并把調試成功的仿真模型轉化為嵌入式代碼生成模型,最后將自動生成的代碼導入TMS320F28335控制箱進行測試,以驗證代碼的正確性和高效性。
2 MBD電機控制系統開發流程
MBD是以實時軟件為開發平臺,實現快速的算法建模、微控制器驅動集成、代碼自動生成、軟件/處理器/硬件在環測試等,MBD電機控制系統開發的實現過程,如圖1所示[3]。首先在Simulink環境中構建電機控制系統的仿真模型,然后將模型改成可以用于自動代碼生成的模型,緊接著把生成的代碼下載到DSP開發板中編譯運行。在整個過程中,只需搭建模型,完成系統的設計,使用嵌入式代碼的全自動生成技術,不需手工編寫代碼,即可獲得實用高效的控制代碼。
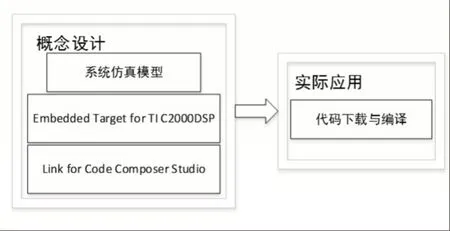
圖1 MBD電機控制系統開發實現過程Fig.1 MBD Motor Control System Development Process
3 模糊自適應PID控制器設計
模糊自適應PID控制算法主體思想是將模糊控制中的模糊推理與傳統PID控制結合起來,利用模糊控制規則對PID的參數進行自適應整定,使被控對象保持在良好的動、靜態穩定狀態,根據不同偏差e和偏差變化率ec,即時輸出新的PID參數,與傳統的PID控制相比,該算法更加靈活和穩定[4]。
3.1 輸入量的模糊化
模糊控制器的輸入為設定轉速與反饋轉速誤差e和其誤差變化率ec,輸出量為比例、積分、微分的修正系數Δkp,Δki,Δkd。在系統運行的不同時刻,e和ec值是不斷變化的,由模糊自適應PID控制器原理可知,在不同時刻均有最適合的PID參數輸出[5]。
模糊控制器處理的模糊語言變量,所以需要將輸入量模糊化才能利用模糊規則實時修改PID的三個參數,選取模糊集合{NB,NM,NS,ZO,PS,PM,PB}作 為 輸 入 量e、ec和 輸 出 量Δkp、Δki、Δkd的取值范圍。可以參照文獻[5]建立各個變量的模糊規則表,之后再對e和ec進行模糊化處理,可得出相應的隸屬度,利用所得出的隸屬度及相應隸屬度的橫坐標帶入下式再求出Δkp、Δki、Δkd。
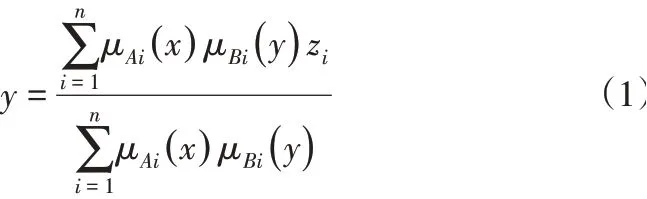
式中:kp、ki、kd-PID控制器的設定值。
3.2 模糊控制器的設計
在Matlab的在Command Window輸入fuzzy命令,回車,添加兩個輸入變量e和ec,三個輸出變量Δkp、Δki和Δkd,規定每個變量的取值范圍,以Δki為例說明其隸屬度函數及取值范圍的選取,如圖2(a)所示。按照既定的模糊規則表,添加Δkp、Δki、Δkd的模糊規則,完成之后,點擊view-Rule,任意拖動e或者ec的刻度線,Δkp、Δki、Δkd的值會不斷變化,如圖2(b)所示。
4 系統建模與代碼自動生成
4.1 搭建基于模糊自適應PID算法仿真模型
采用id=0的控制方式搭建的PMSM矢量控制仿真模型,控制框圖如圖3所示[6],其中在轉速環控制中引入模糊自適應PID控制算法,它的輸出為q軸電流參考值;電流環控制采用PID控制器,它的輸出為d,q軸電壓參考值;逆變器采用SVPWM調制方式。
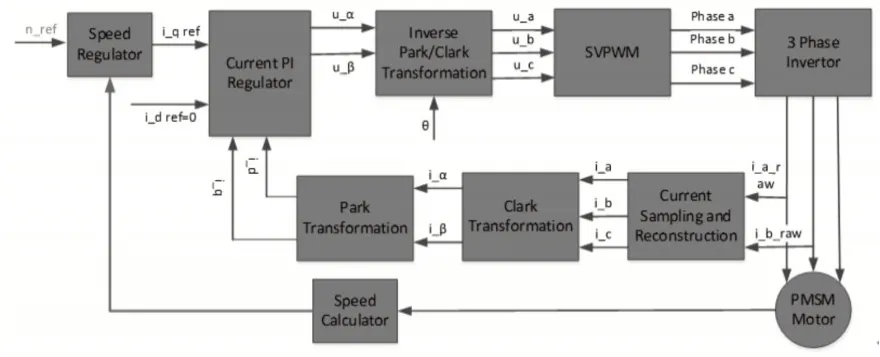
圖3 PMSM id=0矢量控制框圖Fig.3 PMSM id=0 Vector Control Block Diagram
依據以上分析,搭建的PMSM控制系統仿真模型,如圖4所示。模糊自適應PID算法的模型,如圖4(a)所示。基于此算法的PMSM控制系統仿真模型,如圖4(b)所示。
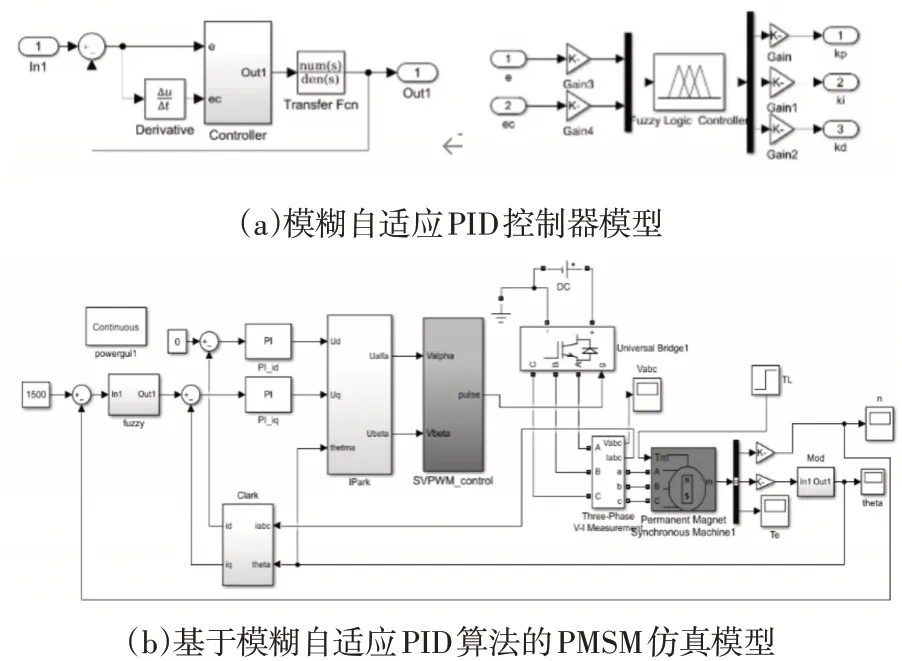
圖4 PMSM控制系統仿真模型Fig.4 PMSM Control System Simulation Model
4.2 系統仿真
仿真參數設定如下:設定轉速3000r/min,相電阻R=18.7Ω;定子繞組自感L=0.026H;轉動慣量J=2.26e-5kg.m2,仿真中設置的輸入電壓為400V,仿真時長為0.75s,并在0.6s時加入負載,仿真得到的轉速波形如圖5所示,從波形可以看出,電機速度響應快,無超調,加入負載后,速度波動較小,并能很快恢復到穩定狀態,進而也驗證了模糊自適應PID控制算法的優越性。
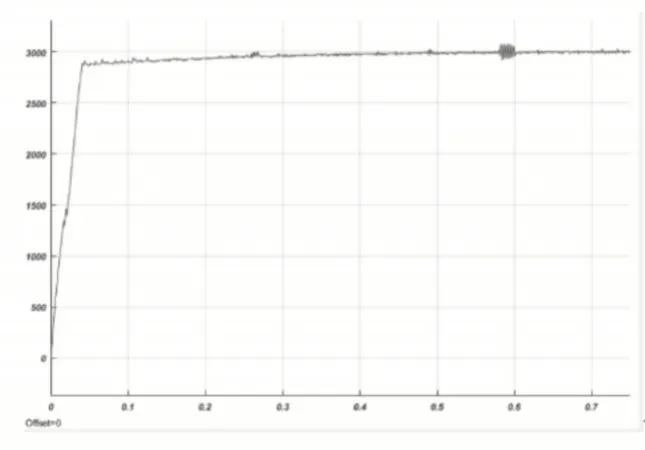
圖5 PMSM仿真速度波形Fig.5 PMSM Simulation Speed Waveform
4.3 代碼生成與運行測試
4.3.1 自動生成代碼的一般流程
自動代碼生成的一般流程,如圖6所示。首先是代碼生成解析,從model.slx轉換到model.rtw,解析出來的.rtw是一個文這里件,它描述了所有輸入、輸出、參數、狀態等模型的配置和屬性信息;其次是目標語言編譯,Embedded Coder會使用Target Language Compiler是代碼生成工具去執行.tlc文件,將model.rtw轉換到model.c和model.h文件,其中還包括與算法相關聯的main文件。Embedded Target for the TI TMS320C2000 DSP Platform產品為TI C2000 DSP實時應用開發的整個過程,從概念設計到代碼的軟件測試整個流程都提供了支持,將現有C代碼與標準控制庫模塊整合,可實現設計效率最大化,這也提供了一種非常快速的電機驅動設計方法。
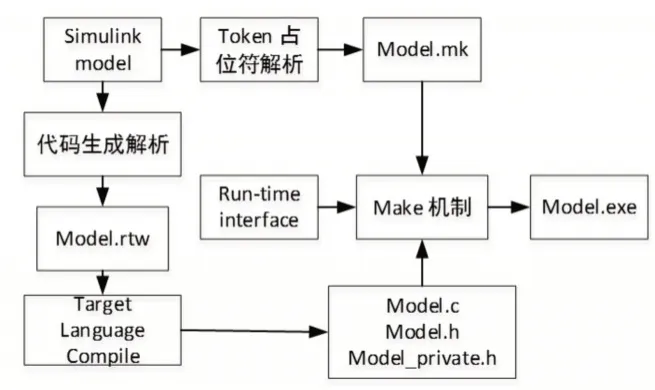
圖6 自動代碼生成流程Fig.6 Automatic Code Generation Process
在上述仿真模型的基礎上去掉硬件連接部分,利用DMC模塊和IQmath模塊搭建嵌入式代碼生成模型,如圖7(a)所示。其中FOC控制模型,如圖7(b)所示。因為,DMC中的PID、Clark變換、Park變換、反Park變換等模塊的輸入信號都需是定點Q格式,所以還要對輸入信號進行規范化和格式化,以ADC采樣數據處理模塊為例,如圖7(c)所示,通過圖示各個模塊可完成對數據的定點處理[7]。
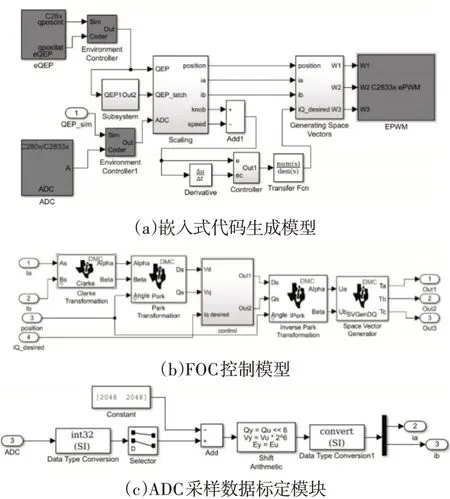
圖7 代碼生成模型的建立Fig.7 Code Generation Model Creation
4.3.2 嵌入式代碼生成模型的建立
在生成代碼之前可以根據Model Advisor檢查意見對模型進行優化,一般可以增加代碼的可讀性,提高代碼的執行效率。優化配置完成后,在圖7所示的代碼生產模型中,點擊Simulink界面的Build Model按鈕,即可一次性生成控制代碼。
5 代碼測試與結果分析
將控制代碼導入到TMS320F28335控制箱,編譯并運行,編譯結果,如圖8所示。實驗在CCS軟件中監測電流采樣值、矢量控制中的各個變量數據及轉速波形,如圖9所示。
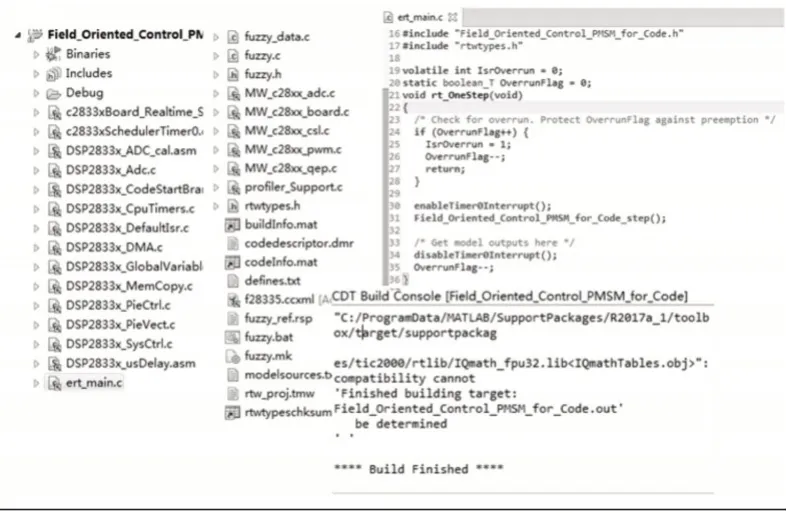
圖8 代碼編譯結果Fig.8 Code Compilation Result
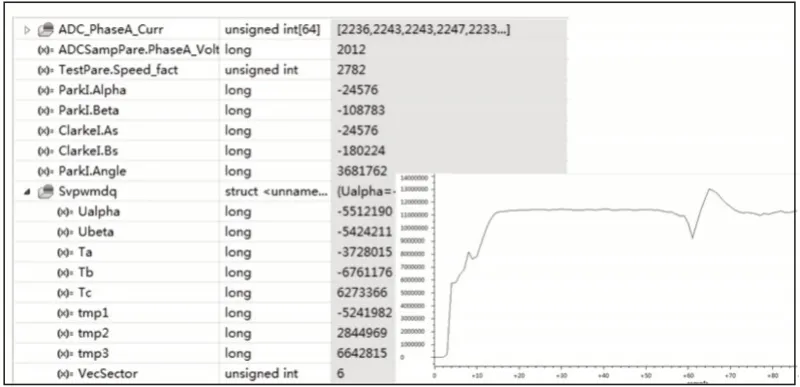
圖9 數據監測與轉速波形Fig.9 Data Monitoring and Speed Waveform
實驗結果表明,引入模糊自適應PID控制算法后,使得電機具有更優的動態性能,速度波形與仿真結果基本相符,可以看出代碼運行正確。
6 結語
主要研究了基于模型開發方法的PMSM控制代碼自動生成的詳細過程,在電機控制的速度環中引入了模糊自適應PID算法,建立了控制系統仿真模型并轉化成了嵌入式代碼生成模型,最后將生成的代碼導入到試驗箱進行了測試,代碼成功運行。由此可見將基于模型設計的開發方法運用到PMSM控制系統的開發中,可高效完成核心控制算法的開發與驗證工作,能大大縮短了開發周期。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2019年7期)2019-04-25 13:17:14
電子制作(2018年18期)2018-11-14 01:48:16
鐵道通信信號(2018年2期)2018-04-18 12:18:23
電鍍與環保(2016年3期)2017-01-20 08:15:32
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13
