超磁致伸縮驅動鏡放大機構設計與仿真
2021-10-20 10:27:40閆洪波郝宏波
機械設計與制造 2021年10期
關鍵詞:有限元
閆洪波,牛 禹,高 鴻,郝宏波
(1.內蒙古科技大學機械工程學院,內蒙古 包頭014010;2.包頭稀土院,內蒙古 包頭014030)
1 前言
超磁致伸縮材料作為一種新型的功能材料,具有分辨率高、輸出力大、響應速度快、能量密度高、頻率特性好等諸多優點,在微電子技術、現代醫療機械以及航天航空等領域得到快速發展[1-4]。超磁致伸縮驅動鏡作為建造大口徑天文望遠鏡的核心部件,采用拼接鏡面主動光學技術,通過傳感控制對大量超磁致伸縮驅動鏡進行精確定位來拼接成一塊完整的巨大鏡面[5]-[6]。由于天文望遠鏡對超磁致伸縮驅動鏡的體積有所限制,導致其輸出位移達不到使用要求,因此需要對輸出位移進行放大。大量研究結果表明,柔性鉸鏈具有體積小、免潤滑、無間隙、無機械摩擦、運動靈敏性高等優點,常用于位移放大機構[7-9]。設計了一種基于杠桿式柔性鉸鏈的二級微位移放大機構,用于超磁致伸縮驅動鏡微小位移的放大。根據杠桿原理、靜力學平衡原理推導出放大機構的放大率計算公式,設計放大機構各部分參數,通過有限元仿真和實驗測試進行驗證。
2 放大機構的設計
2.1 結構及工作原理
設計的杠桿式柔性鉸鏈二級微位移放大機構,如圖1所示。放大機構使用了5個柔性鉸鏈,數量少、結構簡單緊湊、負載能力強,且不改變位移的輸出方向。
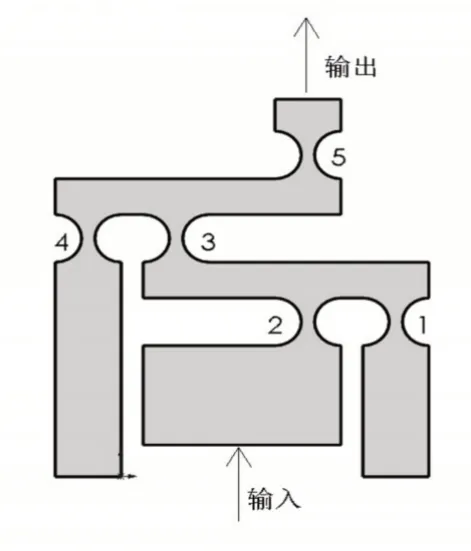
圖1 放大機構結構圖Fig.1 Amplifying Mechanism Structure
放大機構幾何原理,如圖2所示。驅動磁場推動超磁致伸縮棒產生位移,作用到杠桿上的S點,該位移作為放大機構的輸入位移,經過二級放大后從P點輸出。圖中:l1、l3-位移輸入端到支點的距離;l2、l4-位移輸出端到支點的距離。
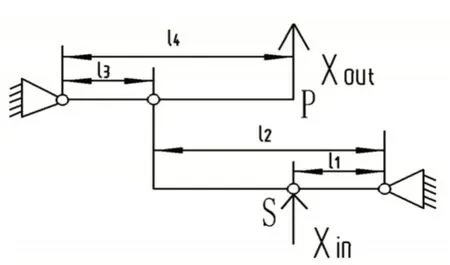
圖2 放大機構幾何原理圖Fig.2 Amplification Mechanism Geometry
2.2 柔性鉸鏈
柔性鉸鏈是一種新型的機械傳動結構,它的中部較為薄弱,在力矩的作用下發生彈性變形來實現位移的放大或運動的傳遞。但在實際的工作過程中,不僅會發生角變形,同時伴隨著拉伸和壓縮,導致柔性鉸鏈的旋轉中心發生偏移,影響機構的放大率[10-11]。
柔性鉸鏈結構,如圖3所示。圖中:h-柔性鉸鏈高度;b-柔性鉸鏈寬度;R-柔性鉸鏈圓弧半徑;t-柔性鉸鏈最小厚度,應滿足h=2R+t[12]。
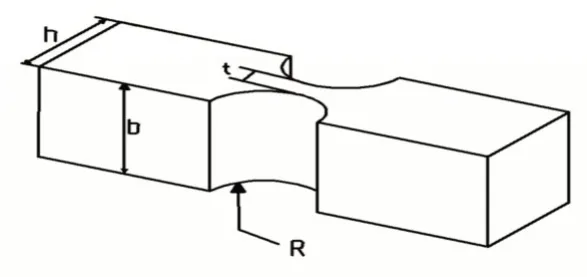
圖3 柔性鉸鏈結構圖Fig.3 Flexible Hinge Structure
2.3 放大率的計算
設作用在柔性鉸鏈i上的軸向力為Fi、軸向變形為Δi、力矩為Mi、轉角為αi;又設杠桿j轉角為βj。分析可知,α1=α2=β1,α3=β1+β2,α4=α5=β2。柔性鉸鏈的受力與變形量關系和承受力矩與轉角位移關系分別為:

其中[13],
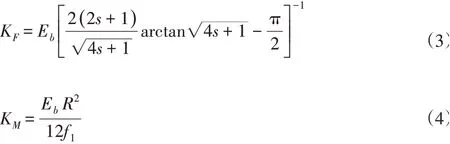

式中:KF-柔性鉸鏈的軸向拉壓剛度;KM-柔性鉸鏈的轉角剛度;E-機構材料的彈性模量;S-柔性鉸鏈切割半徑R與最小厚度t的比值。
首先分析第一級杠桿機構的輸入、輸出位移與受力情況。假設除鉸鏈外的其他構件都是剛性變化,為分析方便,將鉸鏈連接部分的作用力與反作用力用相同符號表示,第一級杠桿機構如圖4所示。
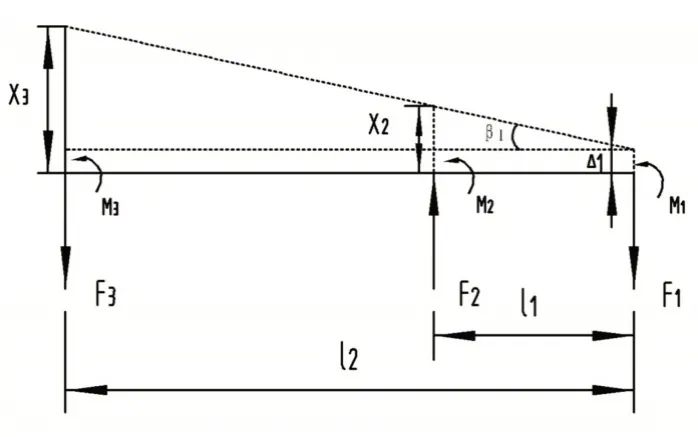
圖4 第一級杠桿機構圖Fig.4 The First Level Lever Mechanism
第一級杠桿以鉸鏈1為旋轉中心,鉸鏈1受到的拉力為F1,軸向伸長量為Δ1;鉸鏈2在超磁致伸縮驅動鏡的作用下,軸向壓縮Δ2。X3為經第一級杠桿放大后的輸出位移,Xin為磁致伸縮驅動鏡的輸出位移,則第一級杠桿的輸入端位移X2為:

第一級杠桿的轉角β1為:

對第一級杠桿進行受力分析,由受力平衡可知:

再分析第二級杠桿機構的輸入、輸出位移與受力情況。方法與第一級杠桿機構類似,第二級杠桿機構,如圖5所示。
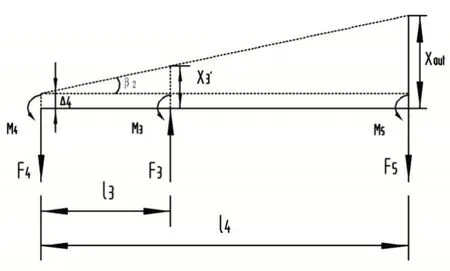
圖5 第二級杠桿機構圖Fig.5 The Second Level Lever Mechanism
第二級杠桿以鉸鏈4為旋轉中心,鉸鏈4受到拉力F4的作用,軸向伸長為Δ4;鉸鏈3連接兩個杠桿,受到F3的作用力,軸向壓縮為Δ3。Xout為經第二級杠桿放大后的輸出位移,則第二級杠桿的輸入端位移X′3為:

第二級杠桿的轉角β2為:

對第二級杠桿進行受力分析,由受力平衡可知:

經兩級杠桿放大后的輸出位移Xout為:

聯合以上各式,推導出該放大機構的實際放大率為:

其中,
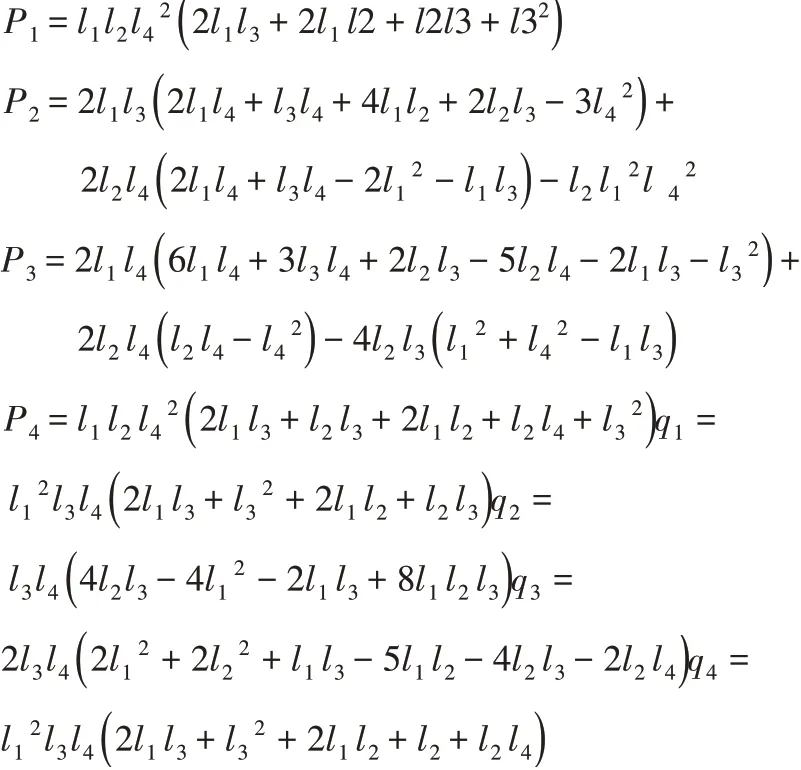
根據公式(15)可以計算出該二級放大機構的放大率為7.98,計算時所用的參數為:l1=3.7mm,l2=10.5mm,l3=3.7mm,l4=10.5mm,R=1.2mm,t=0.6mm,b=1.2mm,該放大機構采用的材料為合金彈簧鋼,彈性模量E=210GPa。
3 放大機構有限元仿真分析
3.1 有限元模型的建立
為驗證所設計放大機構的正確性,使用ansys有限元軟件對放大機構進行建模,采用四面體網格進行劃分,因鉸鏈圓弧切割處形變較大,對其進行細化處理,共劃分網格118423個單元,24717個節點,有限元模型,如圖6所示。
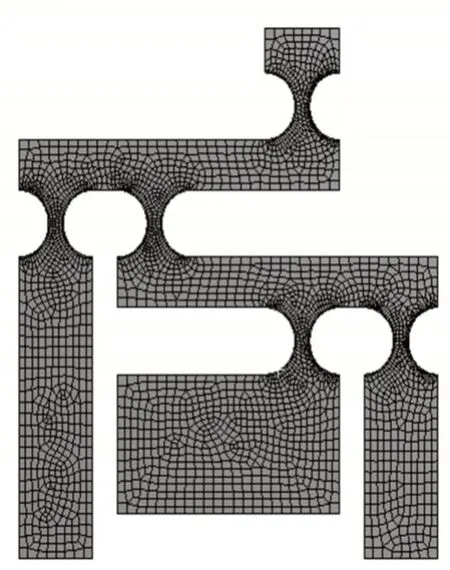
圖6 放大機構有限元模型圖Fig.6 Amplifying Mechanism Finite Element Model
3.2 邊界條件的設置
對放大機構兩邊支座施加固定約束條件,在中間位移輸入端以均布位移載荷方式進行加載,位移輸出端不施加工作載荷,分析放大機構輸出位移并計算放大率。放大機構變形圖如圖7所示,機構的輸入位移作為初始條件,分別取5μm、10μm和20μm,通過仿真分析得到機構的輸出位移如表1所示,根據輸入與輸出位移計算其放大率。
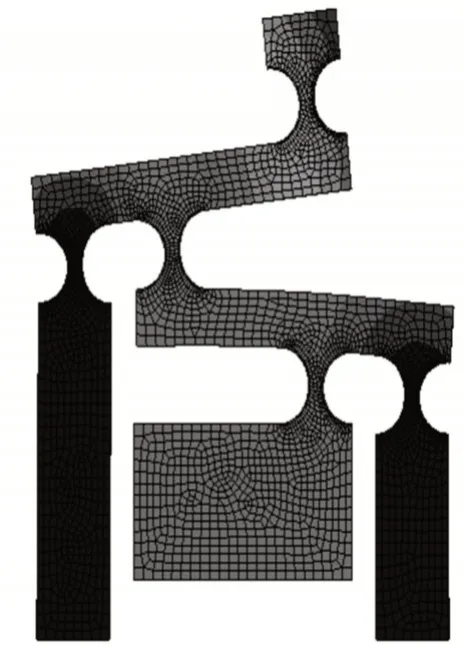
圖7 放大機構位移變形圖Fig.7 Amplification Mechanism Displacement Deformation
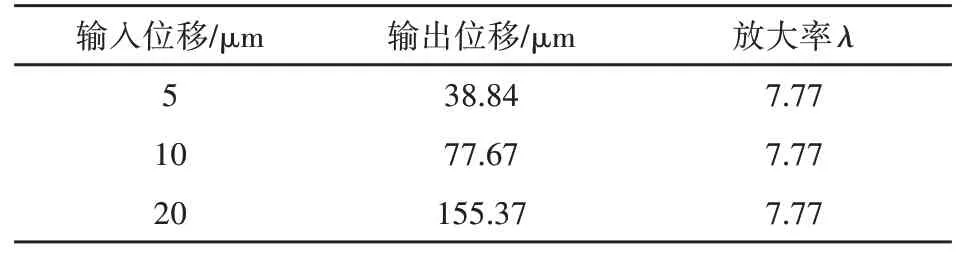
表1 輸入位移與輸出位移有限元計算結果Tab.1 Input Displacement And Output Displacement Finite Element Calculation Results
3.3 柔性鉸鏈尺寸對放大機構的影響
柔性鉸鏈尺寸的設計對放大機構起著至關重要的作用。改變柔性鉸鏈的寬度b和圓弧切割半徑R與最小厚度t的比值S,仿真其對放大率λ的影響,結果如表2所示。
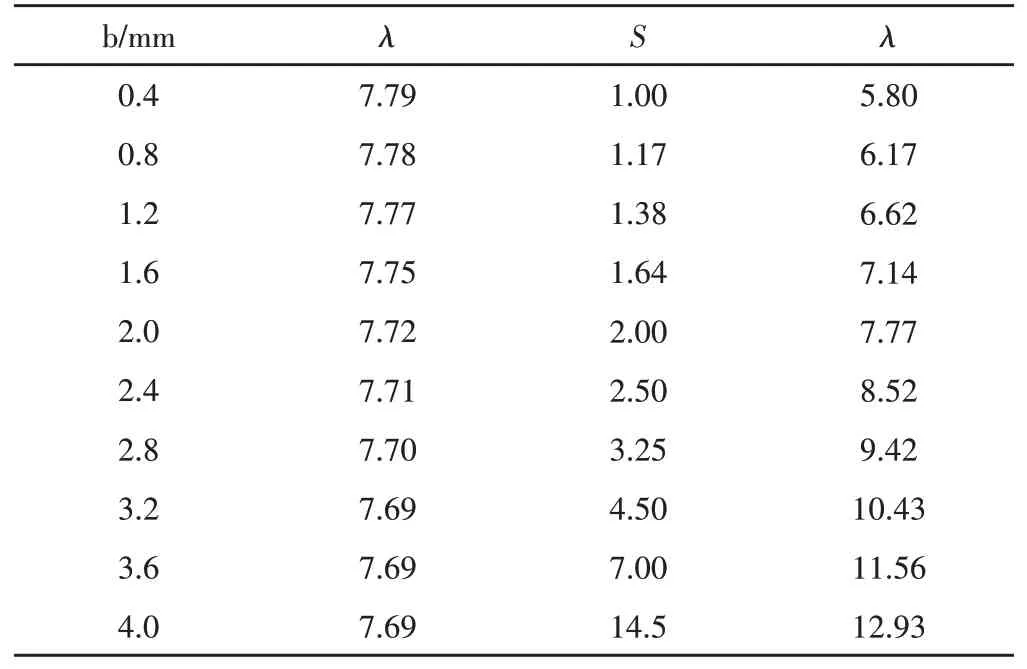
表2 柔性鉸鏈寬度b和比值S下放大率λTab.2 Flexible Hinge Width b And Ratio S Under Magnification λ
3.4 仿真結果分析
由圖8可知,通過有限元分析得到的輸入、輸出位移與理論計算值基本相近,且呈現出良好的線性關系,放大率保持恒定。仿真分析所得的放大率為7.77,理論分析所得放大率為7.98,相對誤差為2.63%,表明該放大機構位移損失小,結構設計合理。
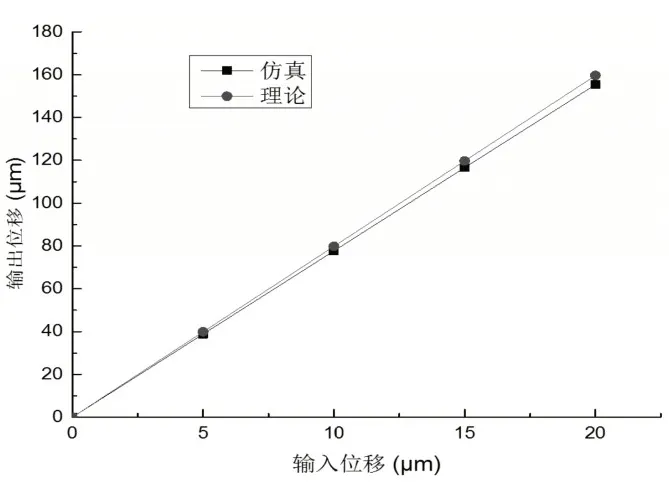
圖8 輸入與輸出關系圖Fig.8 Input And Output Relationship
由圖9可知,隨著柔性鉸鏈寬度b增大,放大機構放大率呈現先緩慢減小后趨于穩定的趨勢。根據圖示變化,在滿足制造條件的前提下,選擇1mm左右寬度適宜。
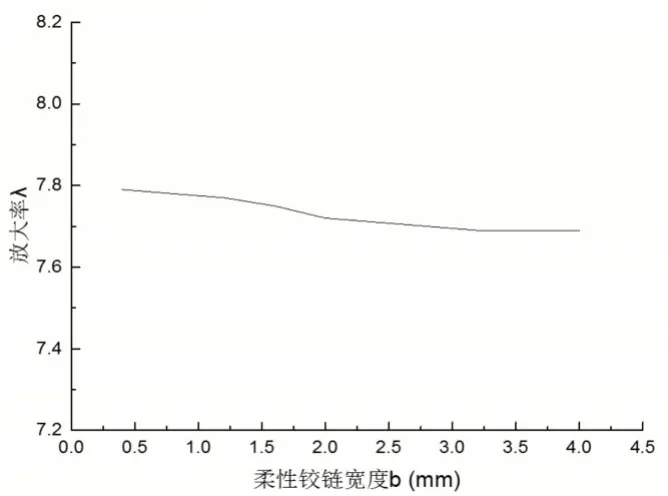
圖9 寬度b對放大率λ的影響Fig.9 Effect of Width b on Magnification λ
由圖10可知,隨著柔性鉸鏈圓弧切割半徑R與最小厚度t的比值S增大,機構放大率λ呈現先增大后飽和的趨勢。根據圖示變化,在滿足最大應力小于材料的屈服極限的前提下,盡可能選擇切割半徑大、厚度薄的柔性鉸鏈。
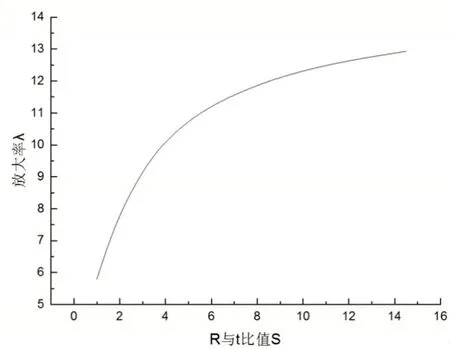
圖10 R與t的比值S對放大率λ的影響Fig.10 The Effect Of The Ratio S of R And t on The Magnification λ
4 放大機構的實驗測試
使用電火花線切割機床加工該放大機構,其總高度19mm,總寬度為17mm。為了避免放大機構因應力集中而影響壽命,切割中使用小電流檔。放大機構焊接在超磁致伸縮驅動鏡上,其實物及安裝如圖11所示。本次實驗采用上海光炬儀器科技有限公司生產的GJ-IV型氣浮自平衡精密光學隔振平臺,輸入位移由超磁致伸縮驅動鏡提供。將安裝有放大機構的超磁致伸縮驅動鏡放置在平臺的基座上,向其通入直流電流,分別測量輸入端和輸出端的位移,重復3次。
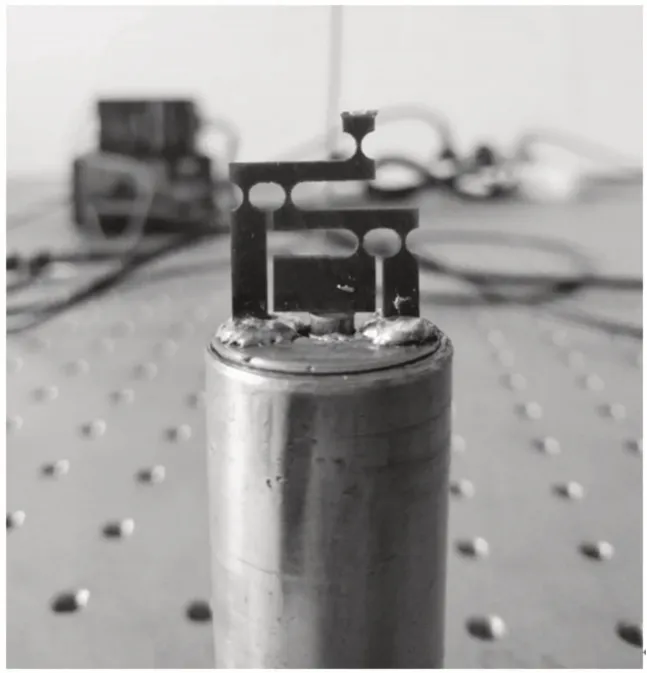
圖11 放大機構實物及安裝圖Fig.11 Amplification Mechanism And Installation
5 結論
(1)設計了一種結構緊湊的微位移放大機構,能夠較好地放大磁致伸縮驅動鏡的輸出位移,在天文望遠鏡制造方面具有良好的適用性。
(2)基于柔性鉸鏈的轉動中心偏移量,推導出放大機構的放大率公式;給出設計參數和放大率之間的映射關系,確定了其結構的尺寸參數;使用有限元仿真和實驗驗證,證實其理論值的正確性,為放大機構的設計提供了參考。
(3)放大機構的放大率受柔性鉸鏈寬度與圓弧切割部分尺寸的影響。放大率隨比值S的增大呈現先增大后逐漸趨于平緩的趨勢,柔性鉸鏈圓弧切割部分的尺寸對放大率影響較大;放大率隨寬度b的增大呈現逐漸減小后趨于穩定的趨勢,柔性鉸鏈寬度b對放大率影響較小。
猜你喜歡
艦船科學技術(2022年20期)2022-11-28 08:19:18
數學物理學報(2022年4期)2022-08-22 04:09:28
減速頂與調速技術(2020年4期)2020-11-22 07:20:26
上海節能(2020年3期)2020-04-13 13:16:16
石油化工建設(2019年6期)2020-01-16 08:03:42
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(2016年3期)2016-06-05 09:36:08
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
