反向Ⅱ型fold-fold的正則化系統(tǒng)的動(dòng)力學(xué)分析
2021-10-18 08:53:48方之昊陳興武
方之昊, 陳興武
(四川大學(xué)數(shù)學(xué)學(xué)院, 成都 610064 )
1 引 言
平面逐段光滑系統(tǒng)被廣泛地應(yīng)用于建筑、機(jī)械、電網(wǎng)等領(lǐng)域[1-5],它的研究是微分動(dòng)力系統(tǒng)研究熱點(diǎn)之一.本文利用S-T正則化方法來(lái)構(gòu)造反向II型fold-fold逐段光滑系統(tǒng)的正則系統(tǒng). 這類逐段光滑系統(tǒng)有一個(gè)焦點(diǎn), 且在一定條件下會(huì)在參數(shù)擾動(dòng)時(shí)產(chǎn)生一個(gè)極限環(huán), 類似于解析系統(tǒng)中的Hopf分岔. 本文給出了正則系統(tǒng)在雙參數(shù)擾動(dòng)下的局部動(dòng)力學(xué)行為, 指出正則系統(tǒng)的平衡點(diǎn)要么為結(jié)點(diǎn), 要么為焦點(diǎn),且焦點(diǎn)的穩(wěn)定性和階數(shù)會(huì)隨著參數(shù)變化而變化.這就導(dǎo)致Hopf分岔的發(fā)生.
考慮一個(gè)有如下形式的平面系統(tǒng)
(1)

X±(x,y)=(P±(x,y),Q±(x,y))T
為定義在R2上的光滑向量場(chǎng). 我們稱系統(tǒng)(1)為一個(gè)逐段光滑系統(tǒng),y=0為切換流形Σ,并且系統(tǒng)
(2)
為上子系統(tǒng), 系統(tǒng)
(3)
為下子系統(tǒng).
Filippov[6]針對(duì)此類系統(tǒng)做出了大量的研究和總結(jié), 其成果被后人稱為Filippov約定.對(duì)于切換流形Σ上任意一點(diǎn)p:(x,0), 定義

(4)
如果H(x)=0, 則p要么是某子系統(tǒng)的平衡點(diǎn), 要么是某個(gè)子系統(tǒng)的切點(diǎn). 若是前者, 我們稱p是逐段光滑系統(tǒng)(2)的邊界平衡點(diǎn); 若是后者, 我們稱p為逐段光滑系統(tǒng)(1)的切點(diǎn). 不失一般性,p固定為原點(diǎn)(0,0). 假設(shè)(0,0)是一個(gè)切點(diǎn).若
則稱切點(diǎn)(0,0)是逐段光滑系統(tǒng)(1)的一個(gè)fold-fold. 若進(jìn)一步有
P+(0,0)>0,P-(0,0)<0,
則稱切點(diǎn)(0,0)是逐段光滑系統(tǒng)(1)的一個(gè)反向II(Invisible-Invisible) 型fold-fold. 如圖1所示.
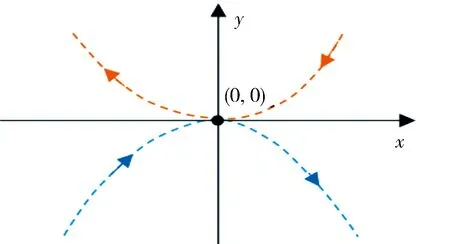
圖1 藍(lán)色(橘色)虛線表示上(下)子系統(tǒng)軌道(線上彩色)Fig.1 The blue (orange) dot curve denotes the orbit of upper(lower) subsystem(color online)
在本文中, 我們假設(shè)(0,0)是逐段光滑系統(tǒng)(1)的反向II型fold-fold. 由文獻(xiàn)[7]提出的正則化理論, 逐段光滑系統(tǒng)(1)有如下形式的正則系統(tǒng)
(5)
其中0<ε?1,
文獻(xiàn)[8]發(fā)現(xiàn)了正則系統(tǒng)的快慢結(jié)構(gòu), 文獻(xiàn)[9]發(fā)現(xiàn)了快慢系統(tǒng)的臨界流形和慢子系統(tǒng)向量場(chǎng)分別與滑行區(qū)域和滑行向量場(chǎng)是微分同胚的. 隨后,文獻(xiàn)[10]研究了Saddle-fold類型的正則系統(tǒng)并給出分岔圖.文獻(xiàn)[11]在某非退化條件下給出了反向II型fold-fold正則系統(tǒng)的焦點(diǎn)量對(duì)正則函數(shù)φ(s)的依賴關(guān)系并進(jìn)一步給出Hopf 分岔曲線.文獻(xiàn)[12]研究了反向II型fold-fold為0.5階細(xì)焦點(diǎn)時(shí)正則系統(tǒng)的動(dòng)力學(xué).本文根據(jù)散度(div(P+,Q+)+div(P-,Q-))|(0,0)的不同情況研究具有反向II型fold-fold的逐段光滑系統(tǒng)(1)所對(duì)應(yīng)的正則系統(tǒng)(5)及其擾動(dòng)系統(tǒng)的動(dòng)力學(xué)行為.
我們?cè)诘?節(jié)中給出了一些預(yù)備知識(shí)及本文的主要結(jié)果,并在第3節(jié)中給出其證明. 在第4節(jié)中, 我們結(jié)合例子對(duì)主要結(jié)果給出一些重要注釋.
2 預(yù)備知識(shí)與主要結(jié)果
對(duì)于任意一點(diǎn)p:(x,y)∈R2, 如文獻(xiàn)[6]定義集合
可知, 當(dāng)p∈Σ時(shí),F(p)是一個(gè)閉凸集. 由文獻(xiàn)[6], 一個(gè)絕對(duì)連續(xù)函數(shù)ψ(t)若幾乎處處滿足微分包含式ψ′(t)∈F(ψ(t))則稱為逐段光滑系統(tǒng)(1)的解. 從而逐段光滑系統(tǒng)(1)有一個(gè)解ψ(t)=(0,0). 然而,對(duì)任意初值點(diǎn)(x0,0),x0>0, 其正向軌道先位于下半平面并且與Σ相交于(x1,0),x1<0, 隨后進(jìn)入上半平面, 與Σ相交于(x2,0),x2>0.為了更精確地描述這一現(xiàn)象并且方便計(jì)算,我們根據(jù)文獻(xiàn)[6,13]定義龐加萊返回映射P(x)的等價(jià)形式. 當(dāng)x1∈(-∞,0)時(shí), 定義兩個(gè)函數(shù)
并且當(dāng)x0,2∈[0,+∞)時(shí)定義
那么在Σ上, 等價(jià)形式被定義為
進(jìn)一步,由文獻(xiàn)[6]可知, 當(dāng)P±(x,y),Q±(x,y)∈Ck(k=1,2,…∞,ω)時(shí)有P(x)∈Ck. 不妨假設(shè)P±(x,y),Q±(x,y)∈Cω.那么可以將P(x)寫為
我們采用文獻(xiàn)[13]中關(guān)于細(xì)焦點(diǎn)的階的定義, 即如果有V1=V2=…=Vk=0但Vk+1>0(<0), 則稱點(diǎn)(0,0)為逐段光滑系統(tǒng)(1)的一個(gè)k/2階不穩(wěn)定(穩(wěn)定)細(xì)焦點(diǎn). 在此定義下, 雖然逐段光滑系統(tǒng)(1)的焦點(diǎn)(0,0)的階數(shù)可能為分?jǐn)?shù), 但它統(tǒng)一了解析系統(tǒng)和逐段光滑系統(tǒng)對(duì)焦點(diǎn)階數(shù)的定義.
除焦點(diǎn)外, 也可能存在一點(diǎn)(x0,0)∈Σs使得Xs(x0,0)=0, 那么我們將該點(diǎn)稱為一個(gè)偽平衡點(diǎn).此時(shí),存在一個(gè)解
ψ(t;(x0,0))=(x0,0).
進(jìn)一步, 如果當(dāng)x≠x0時(shí)(x-x0)Xs(x,0)的第一個(gè)分量小于0,且
Q+(x0,0)<0,Q-(x0,0)>0,
則稱(x0,0)是一個(gè)穩(wěn)定的偽結(jié)點(diǎn). 如果當(dāng)x≠x0時(shí)(x-x0)Xs(x,0)的第一個(gè)分量大于0,且
Q+(x0,0)>0,Q-(x0,0)<0,
則稱(x0,0)是一個(gè)不穩(wěn)定的偽結(jié)點(diǎn).此時(shí)我們考慮逐段光滑系統(tǒng)(1)的一個(gè)擾動(dòng), 即令Q-(x,y)=Q-(x-δ,y).那么,當(dāng)δ>0且足夠小時(shí), 由文獻(xiàn)[6,14]可知, 逐段光滑系統(tǒng)(1)的(0,0)會(huì)分散為上子系統(tǒng)(2)的切點(diǎn)(0,0)和下子系統(tǒng)(3)的切點(diǎn)(δ,0),會(huì)產(chǎn)生滑行區(qū)域
Σs={(x,0)|x∈(0,δ)}
和滑行向量場(chǎng). 若滑行向量場(chǎng)有一個(gè)偽結(jié)點(diǎn), 并且偽結(jié)點(diǎn)和未擾動(dòng)逐段光滑系統(tǒng)(1)的焦點(diǎn)具有不同穩(wěn)定性, 穿越極限環(huán)就會(huì)產(chǎn)生. 當(dāng)δ<0且足夠小時(shí), 情況是類似的. 這類現(xiàn)象被稱為偽Hopf分岔或逐段光滑系統(tǒng)的Hopf分岔.
在時(shí)間尺度變換及此類擾動(dòng)下, 正則系統(tǒng)為
由于正則系統(tǒng)與逐段光滑系統(tǒng)在|y|≥ε的區(qū)域具有相同的軌道結(jié)構(gòu), 我們對(duì)正則系統(tǒng)的研究主要考慮帶狀區(qū)域R. 對(duì)未擾正則系統(tǒng)(6)δ=0, 即正則系統(tǒng)(5), 我們的得到如下結(jié)果.
定理2.1當(dāng)
(div(P+,Q+)+div(P-,Q-))|(0,0)≠0
時(shí)存在ε0>0,使得對(duì)任意ε∈(0,ε0)正則系統(tǒng)(6)δ=0在(0,0)處具有一個(gè)粗焦點(diǎn). 進(jìn)一步, 當(dāng)
(div(P+,Q+)+div(P-,Q-))|(0,0)>0(<0)
時(shí)此粗焦點(diǎn)不穩(wěn)定(穩(wěn)定).
對(duì)擾動(dòng)正則系統(tǒng)(6), 我們有
定理2.2如果(div(P+,Q+)+div(P-,Q-))|(0,0)>0, 則當(dāng)δ≠0足夠小時(shí)擾動(dòng)正則系統(tǒng)(6)在(0,0)的小鄰域內(nèi)有唯一平衡點(diǎn)且如圖 2a所示.
(i) 當(dāng)δ>0時(shí), 存在(δ,ε)空間中兩條曲線ε1(δ)和ε2(δ)滿足ε2(δ)>ε1(δ)以及:當(dāng)ε<ε1(δ)時(shí)此平衡點(diǎn)為一個(gè)穩(wěn)定的正常結(jié)點(diǎn);當(dāng)ε=ε1(δ)時(shí)此平衡點(diǎn)為一個(gè)穩(wěn)定的退化結(jié)點(diǎn);當(dāng)ε1(δ)<ε<ε2(δ)時(shí)此平衡點(diǎn)為一個(gè)穩(wěn)定的粗焦點(diǎn);當(dāng)ε=ε2(δ)時(shí)此平衡點(diǎn)為一個(gè)階數(shù)不小于1的細(xì)焦點(diǎn);當(dāng)ε>ε2(δ)時(shí)此平衡點(diǎn)為一個(gè)不穩(wěn)定的粗焦點(diǎn).
(ii) 當(dāng)δ<0時(shí), 存在(δ,ε)空間中一條曲線ε3(δ)滿足:當(dāng)ε>ε3(δ)時(shí)此平衡點(diǎn)為一個(gè)不穩(wěn)定的粗焦點(diǎn);當(dāng)ε=ε3(δ)時(shí)此平衡點(diǎn)為一個(gè)不穩(wěn)定的退化結(jié)點(diǎn);當(dāng)ε<ε3(δ)時(shí)此平衡點(diǎn)為一個(gè)不穩(wěn)定的正常結(jié)點(diǎn).
定理2.3如果(div(P+,Q+)+div(P-,Q-))|(0,0)<0, 則當(dāng)δ≠0足夠小時(shí)擾動(dòng)正則系統(tǒng)(6)在(0,0)的小鄰域內(nèi)有唯一平衡點(diǎn)且如圖2b所示.

圖2 原點(diǎn)附近的參數(shù)空間(δ,ε)
(i) 當(dāng)δ<0時(shí), 存在(δ,ε)空間中兩條曲線ε4(δ)和ε5(δ)滿足ε5(δ)>ε4(δ)以及:當(dāng)ε<ε4(δ)時(shí), 此平衡點(diǎn)為一個(gè)不穩(wěn)定的正常結(jié)點(diǎn);當(dāng)ε=ε4(δ)時(shí)此平衡點(diǎn)為一個(gè)不穩(wěn)定的退化結(jié)點(diǎn);當(dāng)ε4(δ)<ε<ε5(δ)時(shí)此平衡點(diǎn)是一個(gè)不穩(wěn)定的粗焦點(diǎn);當(dāng)ε=ε5(δ)時(shí)此平衡點(diǎn)為一個(gè)階數(shù)不小于1的細(xì)焦點(diǎn);當(dāng)ε>ε5(δ) 時(shí)此平衡點(diǎn)為一個(gè)穩(wěn)定的粗焦點(diǎn).
(ii) 當(dāng)δ>0時(shí), 存在(δ,ε)空間中存在一條曲線ε6(δ)滿足:當(dāng)ε>ε6(δ)時(shí)此平衡點(diǎn)為一個(gè)穩(wěn)定的粗焦點(diǎn);當(dāng)ε=ε6(δ)時(shí)此平衡點(diǎn)為一個(gè)穩(wěn)定的退化結(jié)點(diǎn);當(dāng)ε<ε6(δ)時(shí)此平衡點(diǎn)為一個(gè)穩(wěn)定的正常結(jié)點(diǎn).
由于函數(shù)φ(s)有無(wú)數(shù)種選取方式,且正則系統(tǒng)的動(dòng)力學(xué)緊密依賴于它, 我們?cè)诙ɡ?.2和定理2.3中給出了細(xì)焦點(diǎn)階數(shù)的下界,但不能確定細(xì)焦點(diǎn)的具體階數(shù). 我們將會(huì)在后面的例子中展示對(duì)不同的函數(shù)φ(s), 細(xì)焦點(diǎn)的階數(shù)是可以超過(guò)這兩個(gè)定理給出的下界.
3 主要結(jié)果的證明
定理2.1的證明 不失一般性, 我們對(duì)上子系統(tǒng)作時(shí)間尺度變換
dτ=-P+(0,0)dt/P-(0,0).
此時(shí)有
從而
這樣的變換不改變穿越區(qū)域、滑行區(qū)域以及偽平衡點(diǎn)的類型和穩(wěn)定性. 因此, 我們對(duì)逐段光滑系統(tǒng)(1)不妨假設(shè)
P+(0,0)=-P-(0,0)>0.

不難計(jì)算出(0,0)為正則系統(tǒng)(6)δ=0的平衡點(diǎn). 那么對(duì)應(yīng)的雅可比矩陣為
其特征多項(xiàng)式為
λ2-b1λ+b2-b3=0, 這里
因此, 我們得到特征值:

所以,若
則平衡點(diǎn)是不穩(wěn)定的粗焦點(diǎn)(穩(wěn)定).定理得證.
定理2.1表明,在散度條件約束下, 正則系統(tǒng)(6)是局部結(jié)構(gòu)穩(wěn)定的.然而,逐段光滑系統(tǒng)(1)卻是結(jié)構(gòu)不穩(wěn)定的, 并且前文已經(jīng)說(shuō)明它可能會(huì)發(fā)生偽Hopf分岔. 此時(shí),一個(gè)很自然的問(wèn)題是擾動(dòng)正則系統(tǒng)(6)會(huì)不會(huì)發(fā)生Hopf分岔?定理2.2和定理2.3回答了此問(wèn)題, 我們?cè)谙旅娼o出它們的證明.
定理2.2的證明 定義函數(shù)
由定理2.1, 當(dāng)δ=0且ε足夠小時(shí), 在(x,y,δ)=(0,0,0)處有初值條件
κ1(0,0,0)=0,κ2(0,0,0)=0
和行列式

其中
其中
將ai(δ,ε)關(guān)于δ在δ=0處進(jìn)行泰勒展開,得到
a1(δ,ε)=a11(ε)+a12(ε)δ+O(δ2),
a3(δ,ε)=a31(ε)+a32(ε)δ+O(δ2),
進(jìn)而,再將系數(shù)aij(ε)關(guān)于ε在ε=0處進(jìn)行泰勒展開得到
a1(δ,ε)=(a111+O(ε))+(a121+O(ε))δ+
O(δ2),
O(δ2)},
a3(δ,ε)=(a311+O(ε))+(a321+O(ε))δ+
O(δ2),
(a421+O(ε))δ+O(δ2)},
其中
從而在δ與ε足夠小時(shí)我們得到a2(δ,ε)>0,a3(δ,ε)<0,其特征多項(xiàng)式為
λ2-(a1(δ,ε)+a4(δ,ε))λ+a1(δ,ε)a4(δ,ε)-
a2(δ,ε)a3(δ,ε)=0.
定義函數(shù)
4a1(δ,ε)a4(δ,ε)+4a2(δ,ε)a3(δ,ε).
將前面的展開式代入后可得
由于
那么
(a111+a411)ε+a421δ+O(ε2,δ2,εδ).

下證ε2(δ)>ε1(δ), 即對(duì)任意的滿足H(δ,ε)≥0的(δ,ε)有G(δ,ε)<0. 我們采用反證法.假設(shè)ε2(δ)≤ε1(δ).根據(jù)定理2.1可知, 可以選取某一(δ,ε),使得H(δ,ε)>0而G(δ,ε)<0.此時(shí),保持δ>0不變而令ε變小, 那么根據(jù)前文的討論和假設(shè)可知, 必然存在點(diǎn)(δ,ε)使得
H(δ,ε)=G(δ,ε)=0
或
H(δ,ε)>0且G(δ,ε)>0.
前一種情況對(duì)應(yīng)ε2(δ)=ε1(δ)而后一種情況對(duì)應(yīng)ε2(δ)<ε1(δ).下面我們分別討論.
對(duì)于前一種情況, 函數(shù)
G(δ,ε)=-4(a1(δ,ε)a4(δ,ε)-
a2(δ,ε)a3(δ,ε))=0.
但是,將前文中的ai,i=1,2,3,4的展開式代入后可得
這與假設(shè)是矛盾的.
對(duì)于后一種情況, 我們可以取(δ,ε)足夠靠近(δ,ε2(δ))并且G(δ,ε)>0, 使得H(δ,ε)>0且足夠小.此時(shí)
O(δ,ε))<0.
這與假設(shè)矛盾. 命題得證.
G(δ,ε)>0,H(δ,ε)<0.
G(δ,ε)=0,H(δ,ε)<0.
因此特征值為一對(duì)相同的負(fù)實(shí)數(shù).又因?yàn)?/p>
經(jīng)過(guò)初等行變換后變?yōu)?/p>
當(dāng)ε>ε1(δ)且ε<ε2(δ)時(shí), 有
G(δ,ε)<0,H(δ,ε)<0.
G(δ,ε)<0,H(δ,ε)=0.
G(δ,ε)<0,H(δ,ε)>0.
當(dāng)δ<0時(shí), 曲線ε3(δ)的存在性和平衡點(diǎn)類型以及退化程度的證明是類似的. 這里我們省略其證明.證畢.
定理2.2表明,在散度條件下,在參數(shù)空間中確定了平衡點(diǎn)類型變化的臨界曲線和焦點(diǎn)階數(shù)變高的曲線. 通過(guò)對(duì)比,我們發(fā)現(xiàn), 逐段光滑系統(tǒng)(1)在δ的擾動(dòng)下偽平衡點(diǎn)的類型直接從焦點(diǎn)轉(zhuǎn)化為結(jié)點(diǎn).其主要原因是δ只會(huì)影響下子系統(tǒng).因而我們可以認(rèn)為這是參數(shù)對(duì)逐段光滑系統(tǒng)(1)的部分?jǐn)_動(dòng). 然而,在正則系統(tǒng)(6)中,δ的變化是對(duì)整個(gè)系統(tǒng)產(chǎn)生影響的, 且ε也會(huì)帶來(lái)影響.
定理2.3的證明 與定理2.2中類似, 在δ與ε足夠小時(shí), 可以通過(guò)隱函數(shù)定理得到正則系統(tǒng)(6)的平衡點(diǎn)
+O(ε2))δ+O(δ2)),

4 例
考慮如下平面逐段光滑系統(tǒng):
直接計(jì)算可得
(div(P+,Q+)+div(P-,Q-))|(0,0)=1.
通過(guò)時(shí)間尺度變換t→2t, 其正則系統(tǒng)可寫為
特征值為
因此,(0,0)是一個(gè)不穩(wěn)定的粗焦點(diǎn). 這與定理2.1的結(jié)果相吻合. 當(dāng)δ>0時(shí), 平衡點(diǎn)位于
從而可得特征多項(xiàng)式
以及相應(yīng)的特征值
定義函數(shù)
ε2(δ)=φ′δ+O(δ2).
另一方面,定義函數(shù)

同理,當(dāng)δ<0足夠小時(shí), 得

其特征值為
為計(jì)算其焦點(diǎn)量g3, 先假設(shè)正則函數(shù)φ(s)在s=0附近形式為
φ(s)=φ1s+φ3s3+h.o.t.,
其中φj表示sj的系數(shù). 由文獻(xiàn)[15],計(jì)算可得
其中
C4(δ)+C5(δ),
根據(jù)正則函數(shù)φ的假設(shè)又有



猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
海峽姐妹(2020年9期)2021-01-04 01:35:44
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
山東青年(2016年1期)2016-02-28 14:25:25
當(dāng)代修辭學(xué)(2014年3期)2014-01-21 02:30:44
 四川大學(xué)學(xué)報(bào)(自然科學(xué)版)2021年5期
四川大學(xué)學(xué)報(bào)(自然科學(xué)版)2021年5期
- 四川大學(xué)學(xué)報(bào)(自然科學(xué)版)的其它文章
- 基于編程行為的學(xué)習(xí)者人格特質(zhì)識(shí)別及應(yīng)用探索
- 穩(wěn)金融背景下的大學(xué)生財(cái)經(jīng)素養(yǎng)通識(shí)教育模式研究:基于大學(xué)生使用互聯(lián)網(wǎng)消費(fèi)信貸產(chǎn)品的調(diào)查
- 不同海拔區(qū)域內(nèi)牦牛腸道菌群結(jié)構(gòu)組成多樣性研究
- 外場(chǎng)作用下CO2分子結(jié)構(gòu)及特性研究
- 一種快堆邊界下的裂變氣體釋放數(shù)值模型
- 基于數(shù)學(xué)形態(tài)學(xué)分形理論與PNN的軸承狀態(tài)監(jiān)測(cè)與故障診斷