中低緯度評估極區導航時IMU數據轉換誤差模型
2021-10-17 23:52:38卞鴻巍王榮穎
中國慣性技術學報 2021年3期
關鍵詞:模型
卞鴻巍,文 者,馬 恒,王榮穎
(海軍工程大學電氣工程學院,武漢 430033)
隨著全球變暖,北極地區冰化加劇。本世紀中葉北冰洋夏季預計將出現全域通航的狀態,北極航運價值將日益凸顯。提前開展極區導航技術和裝備研究十分必要。在極區進行航運、探索等活動中,慣性導航設備作為一種重要的自主導航設備,其極區工作性能的檢驗是一個重要和復雜的問題。特別對于地理位置相對遠離極區的國家,在極區進行大規模海上航行試驗周期長、成本高,實際實施十分困難[1],因此需要研究基于中低緯度試驗航次的被試慣導與參考基準的數據,采用一定方法推算評估被試慣導在極區采取相似運行軌跡和機動狀態的精度性能,這項技術稱為“慣性導航系統極區性能的中低緯度模擬測試技術”,本文簡稱為“極區中低緯度模擬測試技術”。
對于這種利用中低緯度載體運動軌跡和IMU 原始輸出轉移至極區進行極區算法驗證的技術,已有學者進行了相關研究:文獻[2][3]討論了虛擬極點(極區)的方法,本質是重構地球經緯網將當地自定義為虛擬極區,實現在當地中低緯度下對慣導極區算法進行驗證的目的;這一方法存在的問題是無法模擬反映出極區真實的重力矢量與地球自轉矢量等測量條件;此后的研究主要是在軌跡轉移基礎上同時對IMU 數據進行轉換,重新生成極區的模擬IMU 數據,模擬的IMU數據除可用于本慣導極區測試,還可用于地形匹配、重力匹配、組合導航等其他方面。文獻[4]對地球系(地心地固坐標系)坐標軸進行旋轉以構建軌跡,并討論了IMU 的轉換公式,仿真驗證能通過中低緯度測試航行驗證極區算法的有效性;文獻[5]則對模擬極區技術做了一定的分析;文獻[6]第4 部分中給出了中低緯度到極區軌跡轉移的部分IMU 轉換公式,并基于此完成了橫向編排的慣性導航算法在極區的性能驗證。上述對軌跡轉移方法和IMU 轉換算法的研究,僅能進行極區算法驗證,還不足以支持在中低緯度對慣導系統開展模擬測試。關于極區模擬測試理論,文獻[7][8]具體給出了橢球模型下的基準轉換及IMU 轉換公式,完善了模擬測試系統的結構和理論,數字試驗證明在基準誤差不計的條件下模擬慣導性能與極區實地慣導性能相當。文獻[9]則以旋轉調制慣導為對象,也研究了模擬測試中IMU 數據轉移問題,并認為高緯度模擬數據可以反映旋轉調制慣導的特性,數據精度也能夠符合誤差分析的要求。
不同于極區算法的有效性驗證,對于實際的高精度慣導性能測試,參考基準誤差是影響模擬測試精度評估的關鍵因素之一。但基準誤差對模擬測試系統的影響,由于分析困難,前人文獻中大都予以忽略或僅僅停留在定性估計階段。為解決這一問題,本文從慣導系統極區性能中低緯模擬測試的定量誤差分析角度,分析推導了慣導各主要導航變量模擬測試中受中低緯基準誤差影響的程度,并最終推導出地球球體模型下載體中低緯地表運動下模擬極區IMU 輸出轉換修正量誤差的完整公式,為進一步的慣導極區模擬測試系統搭建與評估等工作奠定了重要的理論基礎。
1 極區中低緯模擬測試方法
由于本問題的理論分析較復雜,為簡化分析,本文取地球模型為球體模型,載體應用條件限于地表導航。并確定中低緯度至極區高緯度的軌跡轉移策略為轉移前后載體的速度、姿態、軌跡形狀相對橫向坐標系保持不變。
假設配備導航基準參考系統的載體在中低緯度搭載被試捷聯慣導在橫向赤道附近運行,被試慣導輸出IMU 數據分別為載體(b 系)上導航參考基準給出的速度、姿態在當地地理坐標系(g 系)下分別表示為基準軌跡(位置)為p,即緯度φ、經度λ。橫向坐標系的定義可根據需要人為指定(在地理赤道上選取適當的位置定義橫向極點,使待轉移軌跡處于橫向赤道附近),基本變量計算及橫向慣導編排不再贅述,詳見文獻[10][11]等。
依據轉換公式,將基準導航參數投影至當地橫向地理坐標系(t 系)表示為
其中


其中Λ 表示軌跡沿橫向緯線移動的角距離,即經度跨度,本文稱為“軌跡轉移角”。軌跡轉移如圖1 所示。
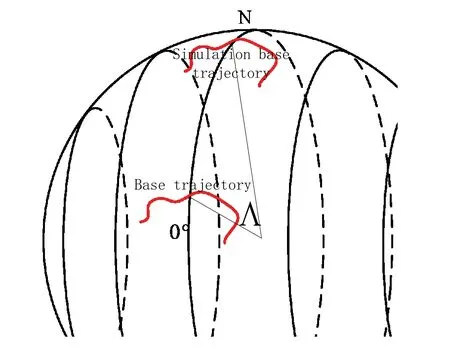
圖1 軌跡轉移示意圖Fig.1 Demonstration of trajectory transformation
圖1 中僅繪出了橫向緯線圈。N 表示傳統北極點,處于橫向赤道上。至此取得了模擬基準的各導航參數。
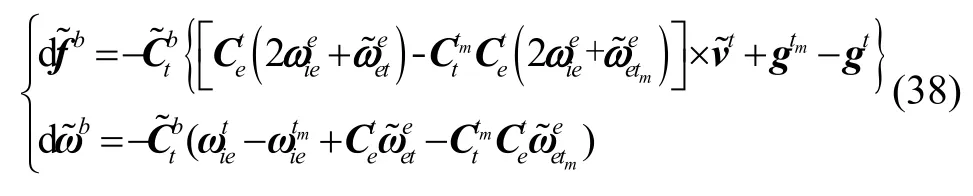
根據慣導解算方程中的比力方程和姿態矩陣微分方程:


其中“×”表示變量的反對稱矩陣(下文同)。以“tm”表示模擬極區地區橫向地理坐標系,“bm”表示模擬極區地區載體坐標系。將式(6)(7)中g 分別置換為t 和tm(b系也對應取b 或bm),表示實測地區和模擬極區地區均應成立的IMU 解算方程,然后根據轉移前后橫向地理坐標系下速度、姿態不變的轉移原則列寫關系式:
可以得到,模擬地區運行的慣導IMU 數據與實測慣導IMU 數據應當滿足式(9)(10)。
極區中低緯模擬測試工作就是將極區模擬基準的導航參數與被試慣導極區模擬解算數據對比,以評估被試慣導的極區工作性能。
圖2 展示了該模擬測試系統的關鍵技術環節。實測基準數據經歷了“g-t-tm”的坐標轉換形成極區模擬基準數據,實測IMU 數據經轉換修正后直接以tm系為導航坐標系進行解算,其解算結果直接與處在tm系的模擬基準進行比較、分析和評估。
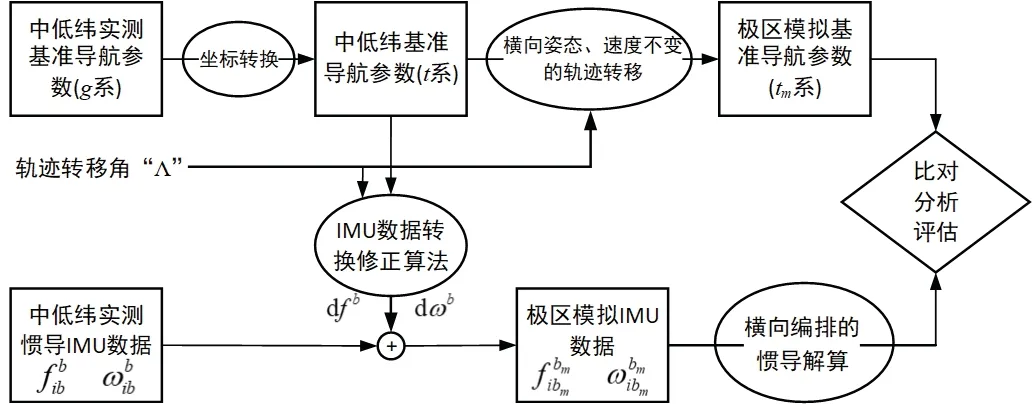
圖2 慣導極區模擬測試原理流程圖Fig. 2 Flow chart of INS polar simulation test system

dfb、dωb分別表示IMU 中加速度計和陀螺儀極區模擬輸出的轉換修正量,實測慣導IMU 數據加上IMU 轉換修正量即得到極區模擬的IMU 數據。由于IMU 轉換修正量的計算需使用基準測量的導航參數,因此基準誤差將造成IMU 轉換修正量的計算誤差,進而導致模擬的IMU 數據出現誤差,此誤差是極區中低緯模擬測試方法最主要的誤差之一,必須加以分析。
2 基準誤差分析與建模
如上所述,基準誤差是極區中低緯模擬測試中重要的誤差源,本節從分析基準數據來源出發,構建合理的基準誤差模型,進行基準誤差的表示。
2.1 基準參數獲取分析
設中低緯度導航基準參考設備輸出位置、速度、姿態等導航參數為當地地理坐標系下的值,暫且僅考慮地球表面導航的情況。
考慮測試實際情況,一般由衛星導航設備(如GPS、BDS)獨立給出位置基準;航姿基準可依賴高精度星敏感器的觀測,精度優于角分級;速度基準可由衛星導航系統或者高精度計程儀給出。也可選擇最常用的高精度慣導與衛導等組合導航系統,提供相應的位置、速度和航姿等導航參數基準,此時基準航向、速度誤差與基準定位誤差不獨立。
鑒于基準數據來源的復雜性,考慮不同基準導航參數誤差之間的關系非常困難,由不同設備來源、不同組合方式乃至不同的濾波模型都將產生不同的結果。為便于分析,本文不具體研究上述基準參數產生方式,將基準的各導航參數誤差暫時視為相互獨立,著重進行模擬測試過程中的誤差傳播分析。
2.2 基準誤差的表示
位置基準輸出值一般為地理經緯度,將位置基準誤差模型表示為:


R 表示地球球體模型半徑。速度誤差模型在地理坐標系和橫向地理坐標系中可分別表示為:
其轉換關系為式(1),由于僅考慮地表導航,速度矢量中包含東向分量和北向分量:
基準誤差通常量級很小,根據羅德里格斯(Rodrigues)旋轉公式,取一階近似得:



3 基準誤差對IMU 極區模擬轉換修正量各變量的影響分析
基本分析思路如下:首先分析位置、速度、航姿等建立各導航參數基準誤差模型,分別代入IMU 轉換修正量計算公式(11)(12)中,最終推導分離出IMU 轉換修正量誤差的具體表達式。
3.1 位置基準誤差的影響
將位置誤差模型代入到轉換公式相關的各矩陣變量中,研究位置矩陣以及有關的地理坐標系變換矩陣在定位誤差影響下的具體誤差表達式,進而分析定位誤差影響效果。
展開并忽略其中二階小量,利用小角度轉動的可交換性得:
3.1.2 實測地區到極區模擬地區橫向地理坐標系轉移矩陣
由計算公式:

可得表達式:
基準的橫北向位置誤差(橫緯度誤差)將對其計算產生影響,易知其誤差量級與Δφt相當。
3.1.3 基準位置誤差影響綜合分析
基準定位信息來源通常是衛星導航系統,定位誤差量級為米級或亞米級,其在位置矩陣、地理坐標系轉移矩陣等計算中的影響均在Δp/ R 量級,為10-7~10-6rad,在0.1 角秒左右,誤差甚微。目前姿態測量精度尚難達到角秒級,速度測量精度在0.1 m/s附近,代入IMU 轉換方程中,發現姿態、速度誤差影響遠大于位置誤差的影響。綜合分析,以目前速度、姿態測量水平和測試要求,基準定位誤差對位置矩陣、地理坐標系轉移矩陣計算的影響完全可忽略不計。
步驟1:初始化候選斷點集,令CUT={Caj︱j=1,2,…,m},其中Caj為條件屬性aj的候選斷點集。
3.2 基準速度誤差對變量 、 計算的影響

其中

同樣地,速度誤差對此變量造成的影響遠大于定位誤差對其的影響,因此:

3.3 基準姿態誤差對變量計算的影響

橫向地理坐標系下的姿態矩陣誤差模型可表示為:


推導可得向量Φt與Φ 的關系:


3.4 重力變量的計算和誤差處理方式
對重力變量gt,本文采用一般重力的達朗貝爾方程對其誤差進行計算分析。由于重力異常和垂線偏差是影響高精度慣導系統精度的重要因素,可通過實測數據庫和相關技術,實時補償垂線偏差、重力異常等因素,才能進一步提升慣導精度水平。本文暫不對此進行深入討論。此外,基準位置誤差顯然可造成的一般重力的計算誤差,由于其影響甚微,可忽略。達朗貝爾方程如下,其中g0=9.780325 m/s2:

4 IMU 轉換修正量誤差模型
綜合基準誤差對變量計算的影響程度,根據式(11)(12),列寫加速度計、陀螺儀轉換修正量計算模型如下:
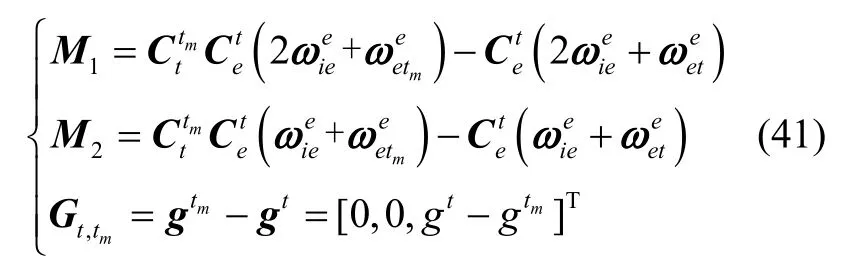
將存在誤差的計算量表示為理論值和偏差值相加,展開表達式后分別與式(11)(12)相減,忽略二階以上小量化簡可得IMU 轉換修正量誤差的符號表達式如式(39)(40)所示。
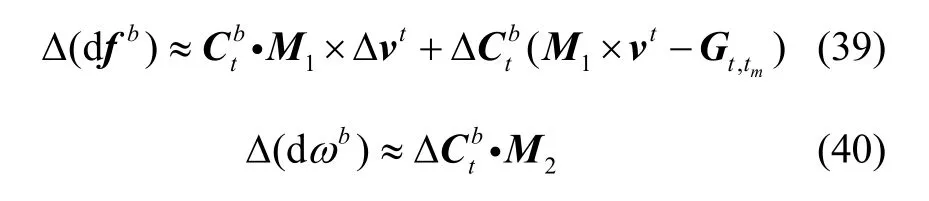
可注意到表達式中模擬IMU 陀螺儀輸出轉換修正量誤差僅與基準姿態誤差有關。其中 gt、gtm分別表示測試地區和模擬地區重力加速度的大小:
經嘗試,采用傳統地理坐標系下的基準誤差作為源變量表示IMU 轉換修正量誤差,公式十分冗長,考慮到公式表達的相對簡潔性,采用橫向速度誤差與姿態失準角誤差作為源誤差變量,列寫IMU 轉換修正量誤差的表達式結構如下:
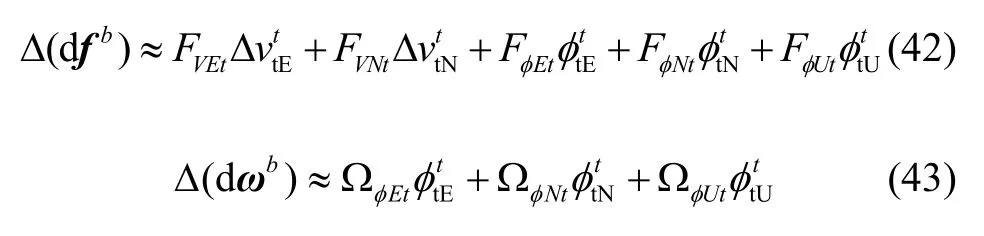
此模型可體現誤差源的各個分量對IMU 轉換修正量的影響,通過計算其中的各個系數便于分析不同誤差源對IMU 轉換修正量影響的方式和量級。借助軟件Wolfram?Mathematica 7 進行符號運算推導,可得表達式中各個系數,見表1。
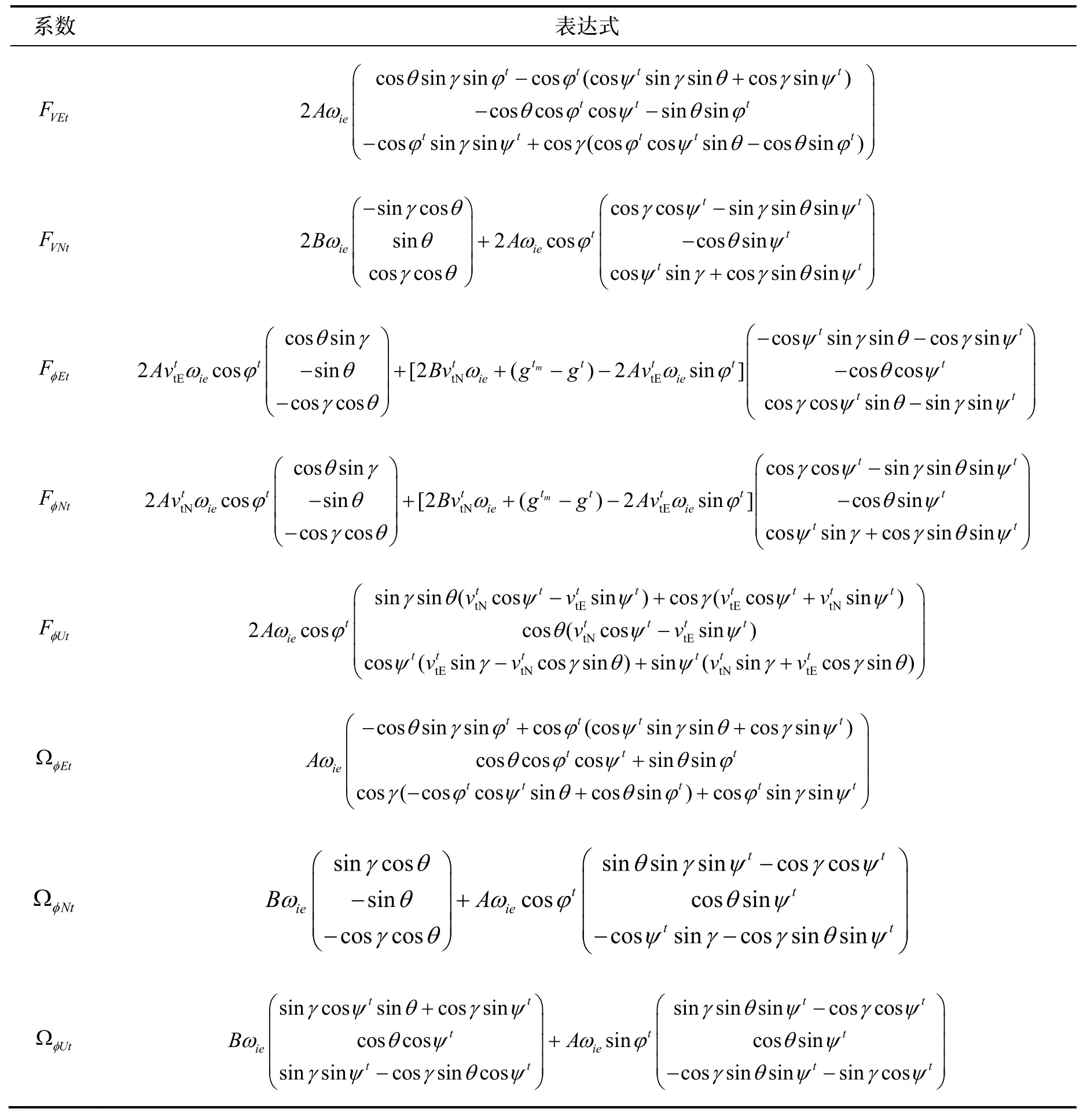
表1 IMU 轉換修正量誤差公式中的系數Tab.1 Coefficient in error formula of IMU conversion correction variables
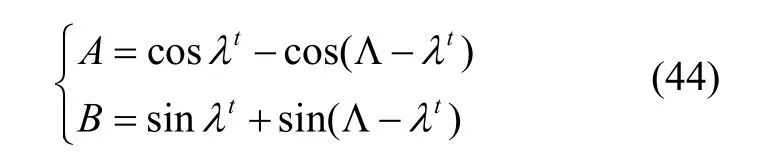
式中 ωie為地球自轉角速度、ψt為橫航向角,A、B 分別代表:
5 仿真試驗
為檢驗IMU 轉換修正量誤差公式推導的正確性,利用參考基準的跑車測試數據[12]進行IMU 極區模擬轉換修正量誤差的計算。
由實測軌跡中心經緯度(約114.47 °E、30.452 °N),選取軌跡中央經線114.47 °E 為橫向赤道以構建橫向坐標系,設置軌跡轉移角Λ=59.548 °,使模擬測試區域在北極點附近。
采用數據中基準系統輸出的“avp”全導航參數,設置此基準存在常值系統誤差:縱搖誤差-1′,橫搖誤差1′,航向誤差3′,東向、北向速度誤差均為0.1 m/s,代入公式(42)(43)和表1 中,計算結果(圖3)顯示,IMU 中陀螺儀與加速度計轉換修正量誤差各分量量級最大約為0.01 °/h(6×10-8rad/s)與2 μg(2×10-5m/s2),初步說明這一精度水平的基準在較高精度的慣導極區模擬測試中造成的轉換誤差是不可忽略的。
該計算結果與理論值(將基準參數與疊加誤差的基準參數直接用于變量計算,代入式(11)(12)并對應相減)比較,結果見圖4,其中上圖為誤差模型計算的陀螺儀轉換修正量的偏差,最大不足10-5°/h,下圖為誤差模型計算的加速度計轉換修正量偏差,最大不足2×10-3μg,與圖3 中IMU 轉換修正量的量級相比較均在1‰以下,驗證了本文所推導的誤差模型的正確性。
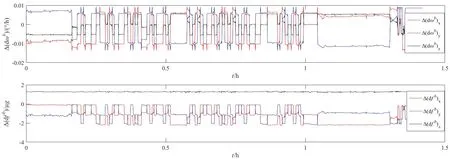
圖3 IMU 轉換修正量誤差解算Fig.3 Error of IMU conversion correction variables
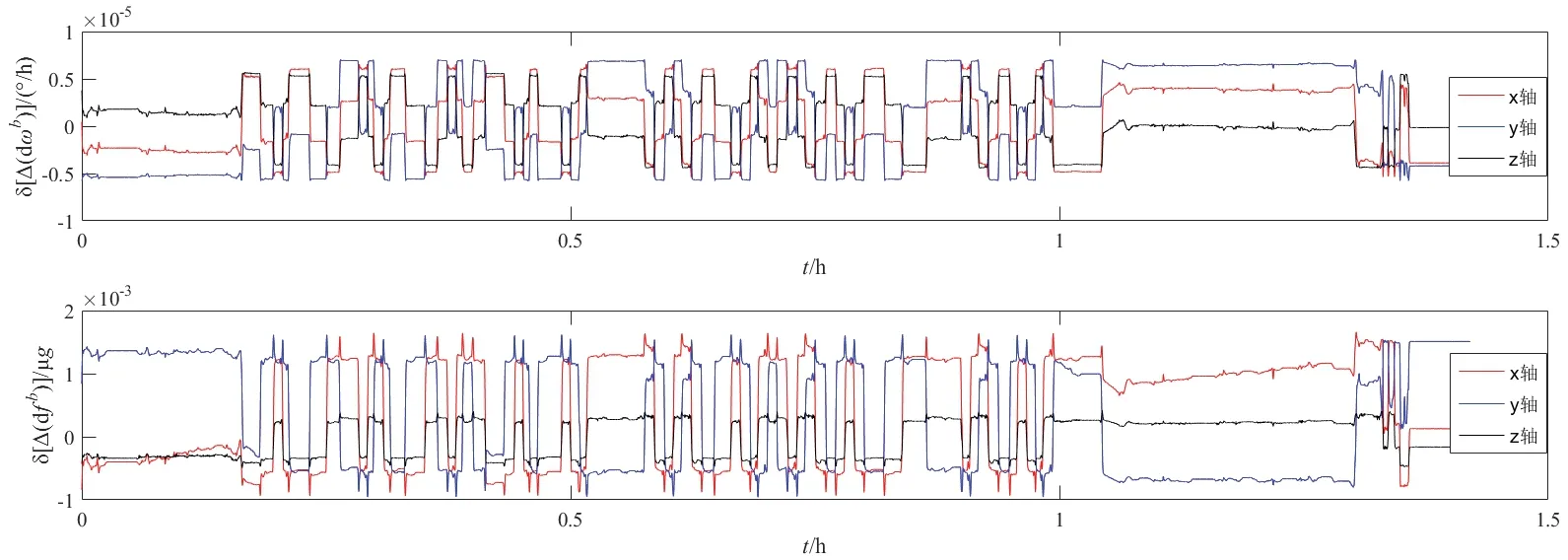
圖4 模型計算IMU 轉換修正量誤差的偏差Fig. 4 Bias of the error of IMU conversion correction variables calculated by model
6 結 論
針對慣性導航極區中低緯模擬測試系統中IMU轉換過程產生誤差的問題,本文開展了IMU 轉換修正量誤差的定量分析工作,推導了參考基準誤差導致的極區模擬轉換修正量誤差的表達式(見式(39)(40))及其完整展開式(見式(42)(43)和表1),經分析,有如下主要結論:
(1)基準定位誤差在IMU 輸出模擬轉換修正過程中的誤差影響較小,可忽略不計;(2)參考基準的姿態誤差是造成IMU 陀螺模擬轉換修正量誤差的最主要原因(見式(40));(3)參考基準的速度、姿態誤差均可造成IMU 加速度計模擬轉換修正量誤差(見式(39));(4)中低緯實測地區與模擬極區地區間的重力差異將通過參考基準水平姿態誤差的傳遞修正計算造成IMU 模擬加速度計輸出誤差(見表1),重力異常、垂線偏差等因素影響有待進一步研究。(5)本文所得公式可運用于船載慣導系統以及機載慣導系統的極區水平機動模擬測試,包含高度通道的誤差影響公式還需進一步推導。
本文開展的慣導極區中低緯模擬測試中的IMU轉換修正量誤差的定量研究工作,為慣導極區中低緯模擬測試技術的精度分析和測試設計提供了理論分析方法,為未來慣導極區中低緯模擬測試的工程化實施奠定了必要的理論基礎。由于推導獲得的IMU 轉換修正量誤差系數仍較為復雜,公式的實際工程應用以及IMU 轉換修正量誤差對極區模擬慣導系統影響的深層機理仍需進一步研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19