面向復(fù)雜電磁環(huán)境的自主天文測量計(jì)時(shí)器研究
2021-10-15 04:06:18劉梓豪王天陽程志博李西旸李崇輝
無線電工程 2021年10期
關(guān)鍵詞:計(jì)算機(jī)測量
劉梓豪,張 超,王天陽,程志博,李西旸,李崇輝
(信息工程大學(xué) 地理空間信息學(xué)院,河南 鄭州 450001)
0 引言
衛(wèi)星導(dǎo)航系統(tǒng)已經(jīng)在測量領(lǐng)域取得了廣泛應(yīng)用,但是其信號(hào)易受干擾或欺騙[1],尤其是在復(fù)雜電磁環(huán)境下,衛(wèi)星導(dǎo)航系統(tǒng)難以獲得高精度并且可靠的位置和時(shí)間信息。天文測量是根據(jù)天文方法觀測自然天體的位置來確定地面點(diǎn)的經(jīng)緯度和某一方向的方位角的方法,具備不受電磁干擾、誤差不隨時(shí)間累積等優(yōu)點(diǎn)。在復(fù)雜電磁環(huán)境下,天文測量也能獲得高精度的定位定向結(jié)果[2]。
由于地球的運(yùn)動(dòng)和恒星自身位置的不斷變化,天體和測站間的相對(duì)位置時(shí)刻都在發(fā)生著變化,因此天文測量需要在記錄天體位置的同時(shí)記錄相應(yīng)的觀測時(shí)刻[3]。測時(shí)的精確程度直接影響天文測量的精度,一個(gè)時(shí)秒的時(shí)間記錄誤差將導(dǎo)致15角秒的觀測結(jié)果誤差,定位誤差最大可達(dá)到450 m[4]。由此可見,測時(shí)在天文測量中是一項(xiàng)十分重要的工作。目前,天文測量計(jì)時(shí)方法主要是接收全球?qū)Ш叫l(wèi)星系統(tǒng)(Global Navigation Satellite System,GNSS)播發(fā)的高精度協(xié)調(diào)世界時(shí)(Coordinated Universal Time,UTC)作為標(biāo)準(zhǔn)時(shí)間,通過將外界標(biāo)準(zhǔn)UTC和計(jì)算機(jī)晶振時(shí)間進(jìn)行時(shí)間對(duì)比,使得計(jì)算機(jī)晶振短時(shí)間內(nèi)能夠維持高精度的UTC。由于計(jì)算機(jī)晶振的頻率高,恒星位置的時(shí)刻能被準(zhǔn)確地記錄下來[5]。利用該方法,計(jì)算機(jī)時(shí)間可以在短期內(nèi)滿足一等天文測量外業(yè)預(yù)計(jì)算的精度要求。
然而在面對(duì)復(fù)雜電磁環(huán)境時(shí),衛(wèi)星導(dǎo)航信號(hào)的完好性無法得到保證,這必然會(huì)影響到天文測量計(jì)時(shí)工作,極大地限制了天文測量的自主性。針對(duì)這一局限性,天文測量計(jì)時(shí)器需要一個(gè)頻率穩(wěn)定度高、體積和功耗小、長期守時(shí)精度高的頻率源來維持UTC。文獻(xiàn)[4]提出利用較高頻率穩(wěn)定度的數(shù)字溫補(bǔ)晶振與嵌入式系統(tǒng)結(jié)合構(gòu)建天文計(jì)時(shí)器來保證長時(shí)間的天文測量計(jì)時(shí)工作,實(shí)驗(yàn)證明該計(jì)時(shí)器在20天內(nèi)的守時(shí)精度為±4 ms,可以滿足一等天文測量需求,但無法滿足更長時(shí)間的應(yīng)用需求。
原子鐘因其高頻率穩(wěn)定度適合作為天文測量計(jì)時(shí)器,但是傳統(tǒng)原子鐘的體積大、重量大和功耗大等原因無法滿足天文測量計(jì)時(shí)器的便攜性和低功耗要求,因此原子鐘一直未被用于天文測量領(lǐng)域。
近年來,原子鐘技術(shù)的迅速發(fā)展使得原子鐘的體積、功耗等問題得到解決[6]。2011年,美國Symmetricom公司發(fā)布了第一款芯片原子鐘商業(yè)化產(chǎn)品,該產(chǎn)品體積為17 cm3,功耗110 mW[7];2014年,中科院武漢物數(shù)所研制出芯片原子鐘的樣機(jī),體積小于20 cm3,功耗小于220 mW;同年,成都天奧電子有限公司研制出體積小于24 cm3,功耗小于0.6 W,百秒頻率穩(wěn)定度為5×10-11的芯片原子鐘樣機(jī);2015年,航天科工203所研制出功耗為3 W的第一代樣機(jī),隨后又研制出體積小于20 cm3、功耗小于1 W的芯片原子鐘[8]。芯片原子鐘技術(shù)的成熟為其作為新一代天文測量計(jì)時(shí)器提供了可能。本文以芯片原子鐘為基礎(chǔ),構(gòu)建了一種小型化高精度的天文測量計(jì)時(shí)器,并進(jìn)行了短期和長期時(shí)間比對(duì)實(shí)驗(yàn),分析了計(jì)時(shí)器的授時(shí)性能以及長時(shí)間的守時(shí)性能。
1 自主天文計(jì)時(shí)器設(shè)計(jì)
1.1 天文測量系統(tǒng)概況
天文測量系統(tǒng)由全站儀、計(jì)算機(jī)、衛(wèi)星天文計(jì)時(shí)器、相應(yīng)附屬設(shè)備及其軟件系統(tǒng)組成,如圖1所示。系統(tǒng)進(jìn)行測量前,計(jì)算機(jī)通過串口線連接全站儀和衛(wèi)星天文計(jì)時(shí)器[9]。天文測量的第一項(xiàng)工作就是使用計(jì)時(shí)器與計(jì)算機(jī)進(jìn)行時(shí)間比對(duì);其次,使用全站儀觀測天體,采集水平角和高度角等測量數(shù)據(jù),并將數(shù)據(jù)回傳計(jì)算機(jī),同時(shí)計(jì)算機(jī)要記錄觀測數(shù)據(jù)到達(dá)時(shí)刻,并自動(dòng)改正到觀測瞬間時(shí)刻;最后,通過概略測站坐標(biāo)、天體的水平角、高度角和觀測瞬間的時(shí)刻等信息求得天文經(jīng)緯度或天文方位角。

圖1 天文測量系統(tǒng)主設(shè)備Fig.1 Main equipment of astronomic measurement system
在天文測量系統(tǒng)中,計(jì)時(shí)器是用來完成計(jì)算機(jī)時(shí)間比對(duì)工作的主要設(shè)備。自主天文計(jì)時(shí)器是為了在不依靠外部信號(hào)條件下,利用自身的頻率標(biāo)準(zhǔn)來完成守時(shí)和授時(shí)。原子鐘的高頻率穩(wěn)定度、不依靠外界信息等優(yōu)點(diǎn),使其適合作為自主天文計(jì)時(shí)器的核心部件。考慮到兼容性,自主天文計(jì)時(shí)器可以提供2種數(shù)據(jù)格式的輸出:一種是自定義二進(jìn)制格式輸出;另一種是NMEA-0183字符串格式輸出,用戶可以根據(jù)自己的需求選擇輸出相應(yīng)的格式類型[9]。自主天文計(jì)時(shí)器不僅提供標(biāo)準(zhǔn)UTC,而且還同時(shí)提供秒脈沖(Pulse Per Second,PPS)輸出。因此,可使用串口通信協(xié)議與計(jì)算機(jī)進(jìn)行通信,通過將秒脈沖搭載到串口線路來完成時(shí)間的傳遞工作。基于原子鐘的高頻率穩(wěn)定度,原子鐘在完成馴服后斷開天線也可長期維持天文測量時(shí)間基準(zhǔn)。
1.2 時(shí)間比對(duì)實(shí)現(xiàn)
時(shí)間比對(duì)要求計(jì)算機(jī)和計(jì)時(shí)器設(shè)備有信息傳遞,通常使用串行接口來完成二者之間的信息傳遞[10]。串行接口的通信方式是一條信息的數(shù)據(jù)被逐位按順序傳送的通信方式,但時(shí)間比對(duì)還需要實(shí)現(xiàn)PPS傳遞,所以需要對(duì)串行接口針腳的使用進(jìn)行針對(duì)性設(shè)計(jì)。考慮到通用性,使用的串行接口標(biāo)準(zhǔn)一般是RS232C接口標(biāo)準(zhǔn),接口使用DB9,其針腳各功能如表1所示。
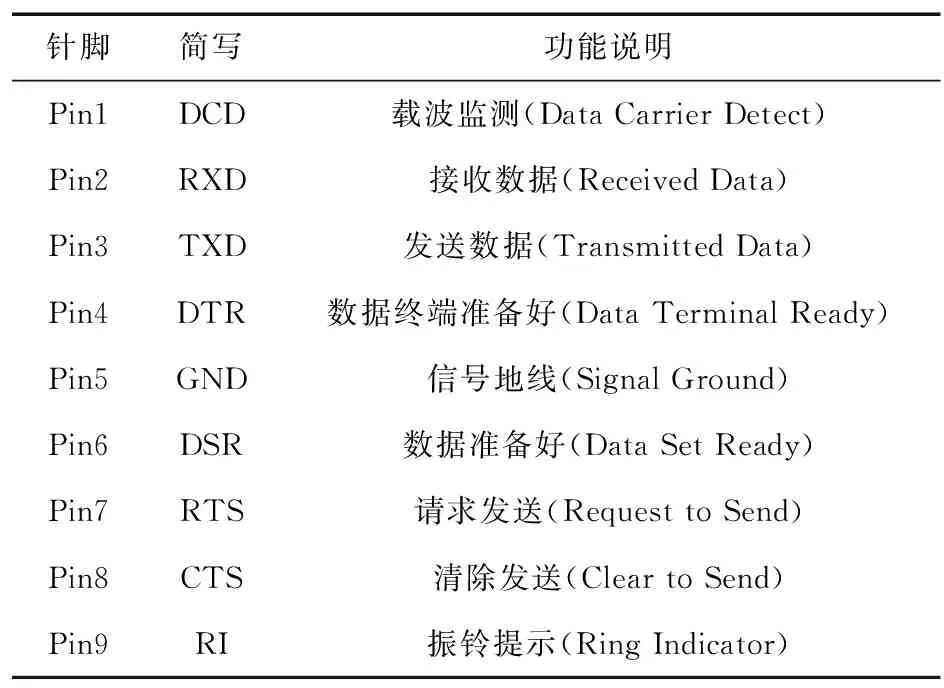
表1 串口針腳功能Tab.1 Serial port stitching function
對(duì)計(jì)算機(jī)最重要的是使用串口接收來自天文計(jì)時(shí)器的時(shí)間信息和PPS。PPS可以通過電位變化來表達(dá),時(shí)間信息可以通過第2針RXD針進(jìn)行接收。在串口通信中,能用于判斷電位變化的針腳有:1針DCD針、6針DSR針、8針CTS針和9針RI針。因此,PPS的變化可以轉(zhuǎn)化為串口中某針的電位變化,計(jì)算機(jī)通過識(shí)別串口中對(duì)應(yīng)針腳的電位變化即可識(shí)別PPS的變化,從而達(dá)到時(shí)間比對(duì)的目的。通常,PPS被搭載在第8針CTS針上,用高電平代表PPS,低電平代表無信號(hào)輸出[9]。
針對(duì)串口通信,微軟公司推出了MSComm的ActiveX控件,使用MSComm控件可以達(dá)到計(jì)算機(jī)對(duì)串口某針的電位監(jiān)測[9]。其中的OnComm事件就是實(shí)現(xiàn)時(shí)間比對(duì)的關(guān)鍵,利用OnComm事件對(duì)指定函數(shù)進(jìn)行綁定,即可在串口某針信號(hào)產(chǎn)生變化時(shí)執(zhí)行指定函數(shù)。通過屬性設(shè)定可以調(diào)整為僅CTS線變化才產(chǎn)生OnComm事件。OnComm事件的變化有2種,其屬性值由Ture變False對(duì)應(yīng)PPS的下降沿,F(xiàn)alse變True對(duì)應(yīng)PPS的上升沿。搭載PPS的針腳可以使用相應(yīng)的屬性值變化對(duì)其進(jìn)行判斷,對(duì)于搭載在第8針CTS針上的PPS信號(hào),可以使用CTSHolding屬性的True和False來進(jìn)行判斷,True對(duì)應(yīng)高電平,F(xiàn)alse對(duì)應(yīng)低電平,通常PPS檢測為其上升沿的到來,即CTSHolding屬性為False變?yōu)門rue的時(shí)刻。PPS、計(jì)算機(jī)計(jì)時(shí)器和CTSHolding屬性關(guān)系如圖2所示,其中計(jì)算機(jī)晶振的分辨率高于1 μs,因此計(jì)算機(jī)晶振和PPS的對(duì)齊精度高于1 μs。

圖2 PPS、計(jì)算機(jī)計(jì)時(shí)器和CTSHolding屬性關(guān)系Fig.2 PPS,computer timer and CTSHolding property relationships
計(jì)算機(jī)時(shí)間主要使用64位高分辨率計(jì)數(shù)器來得到,計(jì)數(shù)器有計(jì)數(shù)值和計(jì)數(shù)頻率2個(gè)指標(biāo),對(duì)應(yīng)的API函數(shù)為QueryPerformanceCounter()和QueryPerformanceFrequency()[11]。計(jì)數(shù)器的計(jì)數(shù)值由計(jì)算機(jī)計(jì)時(shí)芯片的晶振提供,每次開機(jī)從零開始計(jì)數(shù),關(guān)機(jī)之后歸零,所以使用計(jì)數(shù)值除以計(jì)數(shù)頻率,即可得到計(jì)算機(jī)開機(jī)持續(xù)工作的時(shí)間。計(jì)數(shù)頻率是指計(jì)數(shù)值每秒增加的量,該值在開機(jī)之后不會(huì)改變,但晶振實(shí)際頻率通常在該值附近波動(dòng)。計(jì)數(shù)頻率通常大于10 MHz,因此其分辨率至少為1 μs。但是,因?yàn)閃indows操作系統(tǒng)為搶占式多任務(wù)操作系統(tǒng)[12],程序在PPS到來時(shí)難以做到及時(shí)地讀取計(jì)數(shù)器的計(jì)數(shù)值[13]。文獻(xiàn)[9]的實(shí)驗(yàn)證明,計(jì)算機(jī)的計(jì)數(shù)值讀取精度可優(yōu)于10 μs,且計(jì)算機(jī)CPU速度越快,精度越高,同時(shí)利用10臺(tái)計(jì)算機(jī)也證明了計(jì)算機(jī)時(shí)間的鐘速穩(wěn)定性24 h內(nèi)可以滿足一等天文測量對(duì)時(shí)間的要求。
在計(jì)算機(jī)和計(jì)時(shí)器完成連接后,利用程序讀取PPS到達(dá)瞬間的計(jì)算機(jī)內(nèi)部計(jì)時(shí)器的計(jì)數(shù)值,并經(jīng)過相應(yīng)數(shù)據(jù)解算后即可實(shí)現(xiàn)時(shí)間比對(duì)。考慮到計(jì)算機(jī)的操作系統(tǒng)為搶占式多任務(wù)操作系統(tǒng),程序可以設(shè)定為連續(xù)授時(shí)幾分鐘。根據(jù)最小二乘原理結(jié)合抗差理論可以在盡可能地減小粗差的情況下計(jì)算出鐘差和鐘速[14-15]。
2 時(shí)間比對(duì)方法
鐘差是指某一時(shí)刻時(shí)鐘的鐘面時(shí)與正確時(shí)的差值,通常用u表示[16]。假設(shè)鐘面時(shí)時(shí)刻為t,同一時(shí)刻對(duì)應(yīng)的標(biāo)準(zhǔn)時(shí)時(shí)刻為T,則此鐘的鐘差可以表示為:
u=T-t,
(1)
式中,u為正,表示鐘面時(shí)走的比標(biāo)準(zhǔn)時(shí)慢u值;u為負(fù),表示鐘面時(shí)走的比標(biāo)準(zhǔn)時(shí)快u值。
鐘速指的是單位時(shí)間內(nèi)鐘差的變化值,通常用ω表示。若使用u1,u2分別表示鐘面時(shí)t1和t2瞬間的鐘差。令t2>t1,則在t1和t2期間的鐘速表示為:
(2)
式中,ω的正負(fù)表示此鐘運(yùn)行的快慢,為正表示鐘越走越慢,為負(fù)表示鐘越走越快。
評(píng)判一個(gè)鐘的質(zhì)量優(yōu)劣是通過鐘速穩(wěn)定性來評(píng)判的,而鐘速穩(wěn)定性通常是由時(shí)鐘頻率源的頻率穩(wěn)定度決定。一等天文測量對(duì)鐘速的要求為:10 h內(nèi)鐘速的最大互差不超過5 ms;二等天文測量對(duì)鐘速的要求為:10 h內(nèi)鐘速的最大互差不超過10 ms[17]。
由鐘速公式變形即可得任意時(shí)刻的鐘差為:
u=u0+ω(t-t0)。
(3)
若已知某鐘面時(shí)t0和對(duì)應(yīng)瞬間的鐘差u0,以及t0到t之間的鐘速ω,則可計(jì)算得到鐘面時(shí)t時(shí)刻對(duì)應(yīng)的鐘差u。
使用計(jì)算機(jī)與衛(wèi)星天文計(jì)時(shí)器進(jìn)行時(shí)間比對(duì),衛(wèi)星天文計(jì)時(shí)器時(shí)間為從GNSS信號(hào)中提取的UTC時(shí)間,因此利用式(3)得到:
(4)

(5)
使用最小二乘理論[18]得:
(6)
式中,P為權(quán)陣。同理,使用計(jì)算機(jī)與原子鐘進(jìn)行時(shí)間比對(duì),利用式(3)可以建立以下關(guān)系:
(7)

3 實(shí)驗(yàn)及精度分析
為證明原子鐘作為自主天文計(jì)時(shí)器的可行性,本文使用芯片銣原子鐘進(jìn)行時(shí)間比對(duì)。由于目前計(jì)算機(jī)普遍不再具備串行接口,因此計(jì)算機(jī)選擇使用工控機(jī)。測試實(shí)驗(yàn)中,原子鐘具備用于馴服原子鐘的GNSS天線,GNSS信號(hào)正常的情況下,接上天線10 s內(nèi)可完成馴服。馴服后原子鐘時(shí)間與UTC北京時(shí)間同步,輸出的1PPS精度優(yōu)于100 ns,1PPS抖動(dòng)小于200 ns,1PPS上升時(shí)間小于5 ns,脈寬200 ms。10 MHz頻率基準(zhǔn)信號(hào)輸出波形為正弦,幅度≥0.5 V,功率≥7 dBm,頻率穩(wěn)定度≤5×10-11,開機(jī)特性≤5×10-10。時(shí)間信息通過航插轉(zhuǎn)DB9接口,電平為5 V,輸出時(shí)間信息為NMEA0183中的GPRMC格式,時(shí)間比對(duì)程序使用C#完成。
原子鐘的精度和穩(wěn)定性可通過原子鐘時(shí)與標(biāo)準(zhǔn)UTC的鐘差、鐘速以及殘差中誤差來描述。一等天文大地測量要求10 h內(nèi)鐘速的最大互差不超過5 ms/h,一等天文經(jīng)度測量要求中誤差不超過20 ms/h[17],因此實(shí)驗(yàn)以10 h鐘速最大互差和授時(shí)殘差中誤差作為評(píng)價(jià)芯片原子鐘短期授時(shí)性能的指標(biāo),以與標(biāo)準(zhǔn)UTC的鐘差作為評(píng)價(jià)芯片原子鐘長期守時(shí)性能的指標(biāo)。
3.1 芯片原子鐘短期授時(shí)性能測試及分析
為驗(yàn)證原子鐘是否能替換傳統(tǒng)的衛(wèi)星天文計(jì)時(shí)器用于天文大地測量,將芯片原子鐘與衛(wèi)星天文計(jì)時(shí)器同時(shí)連接在同一工控機(jī)上進(jìn)行時(shí)間比對(duì)。實(shí)驗(yàn)中,在原子鐘完成馴服后即斷開GNSS天線,由于原子鐘不再接收任何外界信息,只需正常供電就可以自主維持時(shí)間基準(zhǔn),所以可以擺脫對(duì)外界信號(hào)的依賴,提高天文測量系統(tǒng)的自主性。
首先,為測試不同授時(shí)間隔所對(duì)應(yīng)的最大鐘速互差,將10 h連續(xù)時(shí)間比對(duì)數(shù)據(jù)分別以1,2,5,10和20 min為間隔,使用抗差估計(jì)進(jìn)行鐘差鐘速計(jì)算,實(shí)驗(yàn)結(jié)果如表2所示。由結(jié)果可以看出,無論采用多長時(shí)間間隔進(jìn)行計(jì)算,芯片原子鐘和衛(wèi)星計(jì)時(shí)器的鐘速最大互差均相差不大,說明二者與計(jì)算機(jī)進(jìn)行時(shí)間比對(duì)的性能相當(dāng)。此外,二者都需要使用至少5 min的時(shí)間間隔才能達(dá)到一等天文測量的要求,即最大鐘速互差不超過5 ms/h。

表2 鐘速最大互差統(tǒng)計(jì)值Tab.2 Statistics of maximum clock speed difference
其次,為測試芯片原子鐘和衛(wèi)星天文計(jì)時(shí)器的授時(shí)殘差中誤差,將連續(xù)約31 h的時(shí)間比對(duì)數(shù)據(jù)分為5分鐘/組,使用抗差估計(jì)計(jì)算每組的鐘差、鐘速和殘差中誤差,實(shí)驗(yàn)結(jié)果如圖3所示。從圖3可以分析得出,使用芯片原子鐘和使用衛(wèi)星計(jì)時(shí)器在殘差中誤差的變化上基本一致,最大的殘差中誤差值分別為49.1,48.4 μs,殘差中誤差平均值分別為16.6,16.8 μs。因此,使用芯片原子鐘可以達(dá)到與使用衛(wèi)星計(jì)時(shí)器同等精度的殘差中誤差,能夠滿足一等天文經(jīng)度測量所要求的20 ms精度。
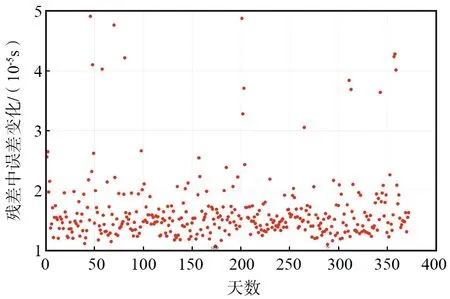
(a) 原子鐘

(b) 衛(wèi)星計(jì)時(shí)器圖3 殘差中誤差變化Fig.3 Changes in RMSE
3.2 長期守時(shí)精度分析
為了進(jìn)一步分析在長期沒有GNSS信號(hào)的條件下,基于芯片原子鐘的天文計(jì)時(shí)器能否滿足天文測量的需求,而原子鐘時(shí)和標(biāo)準(zhǔn)UTC間的鐘差可以體現(xiàn)長期守時(shí)精度,因此實(shí)驗(yàn)主要分析二者之間的鐘差長期變化情況。實(shí)驗(yàn)使用高精度北斗馴服的銣原子頻率標(biāo)準(zhǔn)作為標(biāo)準(zhǔn)UTC,每天使用計(jì)數(shù)器和示波器對(duì)原子鐘時(shí)和標(biāo)準(zhǔn)UTC進(jìn)行一次時(shí)間比對(duì),并計(jì)算二者間的鐘差,連續(xù)30天實(shí)驗(yàn)結(jié)果如圖4所示。實(shí)驗(yàn)結(jié)果表明,芯片原子鐘的鐘差隨時(shí)間逐漸增大,第30天的鐘差變化為184.3 μs,遠(yuǎn)遠(yuǎn)小于天文經(jīng)度測量要求的20 ms限差,證明芯片原子鐘在不連接GNSS信號(hào)的條件下,至少可以在30天內(nèi)達(dá)到一等天文測量對(duì)計(jì)時(shí)器的要求。
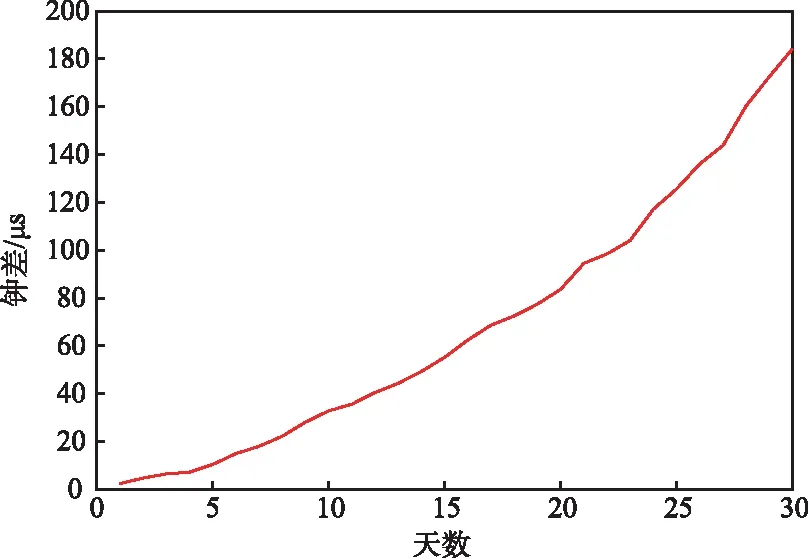
圖4 原子鐘時(shí)與UTC間鐘差變化Fig.4 Variation of the time difference between UTC and atomic clock
4 結(jié)束語
本文提出了利用芯片原子鐘替代衛(wèi)星計(jì)時(shí)器作為天文測量時(shí)間比對(duì)設(shè)備的方法,并通過相關(guān)實(shí)驗(yàn)進(jìn)行了驗(yàn)證。實(shí)驗(yàn)結(jié)果表明,芯片原子鐘與衛(wèi)星天文計(jì)時(shí)器的短期授時(shí)性能相當(dāng),采用5 min時(shí)間間隔時(shí),其10 h的鐘速變化最大互差為4.8 ms,滿足一等天文測量對(duì)時(shí)鐘要求的5 ms限差;時(shí)間比對(duì)殘差中誤差為16.6 μs,滿足一等天文經(jīng)度測量要求的20 ms限差;30天守時(shí)鐘差為184.3 μs,滿足一等天文經(jīng)度測量要求的20 ms限差。因此,芯片原子鐘在完成馴服后斷開天線,只需正常供電就至少可以在30天內(nèi)達(dá)到一等天文測量的要求。相較于衛(wèi)星天文計(jì)時(shí)器,可以極大地減弱對(duì)GNSS信號(hào)的依賴,提高天文測量的自主性。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年7期)2021-07-28 06:44:42
趣味(數(shù)學(xué))(2020年9期)2020-06-09 05:35:08
科技傳播(2019年22期)2020-01-14 03:06:34
科技傳播(2019年22期)2020-01-14 03:06:30
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
消費(fèi)導(dǎo)刊(2017年20期)2018-01-03 06:26:40
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21