機翼尺度效應對等離子體分離流動控制特性的影響1)
2021-10-12 08:55:04陽鵬宇賴慶仁車兵輝
力學學報 2021年12期
陽鵬宇 張 鑫 ,2) 賴慶仁 車兵輝 陳 磊
* (中國空氣動力研究與發展中心空氣動力學國家重點實驗室,四川綿陽 621000)
? (中國空氣動力研究與發展中心低速空氣動力研究所,四川綿陽 621000)
引言
當機翼處于大迎角時,機翼邊界層無法克服逆壓梯度,機翼繞流流場發生了流動分離,使得機翼的升力降低、阻力增加,從而引起機身、舵面等發生振動.自普朗特提出邊界層理論以來,抑制機翼分離流的研究就從未停止過[1-9].各國投入大量的人力、財力去開展機翼分離流控制研究,力爭通過提升機翼的氣動性能,增加機翼可用迎角與可用升力,實現飛機短距起降,代替傳統增升裝置,擺脫傳統飛機設計的束縛,取得革新.
介質阻擋放電(dielectric barrier discharge,DBD)等離子體流動控制技術作為一種典型的主動,流動控制技術,因具有響應迅速、工作穩定、結構簡單等突出優點,為抑制氣流分離、推遲機翼失速迎角、提升機翼氣動性能提供了重要技術支撐[10-13].
在國外,美國和俄羅斯等航空大國有固定的研究人員持續開展該領域研究.美國圣母大學的Kelley 等[14]通過采用陶瓷作為翼型材料,對激勵器施加30 kV 正弦高壓等方式,在Re=2.3 × 106的情況下,實現了翼型分離流控制.莫斯科物理技術研究院通過采用納秒脈沖激勵的方式,在Ma=0.85 的情況下,抑制了翼型氣流分離[15].在歐洲,以發展“綠色航空”為牽引,流動控制委員會組織了數十所高校,針對機翼分離流問題,開展了深入研究,探索了分離流等離子體控制機理,摸清了激勵參數對控制效果的影響規律[16].在亞洲,新加坡國立大學的鄭建國等[17]指出納秒脈沖等離子體激勵器產生的誘導熱是翼型分離流控制的關鍵.日本航天科學研究所的Sato等[18]通過數值模擬方法分析了不同雷諾數下激勵器的最優激勵頻率與翼型前緣分離剪切層之間的耦合關系.
在國內,研究人員通過采用數值模擬[19-25]、風洞實驗[26-33]、飛行驗證[34-35]等方式,深入開展了基于等離子體激勵的機翼分離流控制研究,拓展了等離子體激勵器可控風速[36]與可控雷諾數[37],提高了技術成熟度,為該技術的工程化應用奠定了重要技術基礎.
盡管在流動控制機理分析、高風速及高雷諾數下等離子體控制效果方面取得了重要進展,但機翼的尺度較小,展長一般不超過1 m.而真實飛行器的翼展多在10 m 以上.因此,分析機翼尺度效應對分離流等離子體流動控制的影響規律,掌握等離子體控制機理,提升等離子體對大尺度模型的控制效果,是推動等離子體流動控制技術實現工程化應用的關鍵之一.
本文采用測力與粒子圖像測速儀(particle image velocimetry,PIV)相結合的方法,針對不同尺度的機翼開展了分離流等離子體控制研究,引入能效比系數公式分析了尺度效應對控制效果的影響規律,探索了等離子體流動控制機理,為開展全尺寸飛機等離子體流動控制研究提供技術支撐.
1 實驗系統
1.1 對稱布局DBD 等離子體激勵器
圖1 給出了對稱布局等離子體激勵器布置示意圖.如圖1 所示,激勵器主要包括兩層電極、絕緣介質和激勵電源3 部分.目前常采用正弦交流、納秒脈沖和微秒脈沖3 種高壓電源產生等離子體.不同的激勵電源會產生不同的誘導流場.本文僅采用正弦交流電源作為激勵電源.實驗時,上層電極與正弦交流電源相連,下層電極接地.下層電極的寬度覆蓋上層電極的兩端.兩層電極之間由絕緣介質隔開.當電壓超過一定幅值時,上層電極周圍的空氣被電離,從而產生帶電粒子.在電場的作用下,這些帶電粒子在定向運動的過程中與中性分子發生碰撞,從而誘導產生射流[38-41].在實驗結果部分,本文會對激勵器誘導流場特性進行分析.

圖1 對稱布局等離子體激勵器布局示意圖Fig.1 Configuration of symmetrical DBD plasma actuator
1.2 激勵器誘導流場特性實驗設置
本文采用正弦交流對稱布局激勵器開展研究.采用銅箔膠帶作為電極.上、下兩層電極的厚度為0.05 mm,兩層電極的幾何中心重合.上層電極的寬度為2 mm,下層電極的寬度為5 mm.采用厚度為0.1 mm 的聚酰亞胺膠帶作為絕緣介質.
采用由西安浩寧電子科技有限公司生產的高壓交流電源開展實驗.該電源的電壓峰峰值為0~ 20 kV,頻率范圍為0.1~ 6 kHz.本文采用連續激勵的模式開展實驗研究,占空比為100%.
采用LAVISION 公司生產的高頻PIV 系統開展實驗.相機分辨率為1024 × 1024 像素,視場大小為70 mm × 70 mm,采集頻率為1.8 kHz,采集時間為2 s.激光器的最高工作頻率為20 kHz,單脈沖能量為30 mJ.
實驗時,將布置有等離子體激勵器的平板模型放置在尺寸為800 mm × 600 mm × 600 mm (長 ×寬 × 高)的封閉箱體內.通過預留的走線孔將高壓線纜引入箱體內部并通過線纜連接交流電源與激勵器.實驗前,通過進氣口將橄欖油示蹤粒子注入到箱體內.隨后,通過蓋板將進氣口封閉.當粒子分布均勻后,再開展實驗.采用Davis10.0 軟件對原始圖像進行互相關處理.運算窗口為32 × 32 像素,重疊量為50%,速度誤差小于3%.
1.3 風洞介紹
1.3.1 小尺度模型實驗所用風洞
小尺度機翼實驗在中國空氣動力研究與發展中心(以下簡稱: 氣動中心)的電空氣動力學研究型低速風洞中進行.該風洞是一座開口直流式風洞,主要由收縮段、擴散段、駐室和風機等部分組成.試驗段尺寸為750 mm × 750 mm × 1050 mm,風洞全長為11.5 m.穩定風速范圍 2~ 55 m/s,湍流度小于0.3%.
1.3.2 大尺度模型實驗所用風洞
為了提高機翼尺度,在氣動中心Φ3.2 m 低速風洞開展了大尺度機翼風洞實驗.該風洞是一座單回流式低速風洞.實驗段為開口射流區,直徑為3.2 m,長度為5 m.實驗段穩定風速范圍為8~ 115 m/s,湍流度小于0.3%.
1.4 實驗模型介紹
1.4.1 小尺度模型實驗所用模型及支撐裝置
采用超臨界機翼(翼型剖面為SC(2)-0714)開展小尺度模型等離子體流動控制研究.模型由鋁制成.機翼的前緣后掠角為25°,平均氣動弦長為100 mm,展長為380 mm.如圖2 所示,采用豎直方式安裝機翼.通過支桿將模型與天平進行連接.由于部分支桿會暴露在流場中,因此采用整流罩的方式降低支桿帶來的實驗誤差.通過轉盤的轉動實現模型迎角的變化.角度控制機構的精度優于0.05°.

圖2 小尺度機翼測力實驗的設備布置圖Fig.2 Sketch of the force measurement setup for small size wing
采用應變天平開展測力實驗.實驗前,通過天平校準架對該天平進行靜態標定.表1 給出了靜態標定結果.

表1 應變天平靜態標定結果Table 1 Static calibration results of balance
實驗時,采用采樣前延時10 s,采樣時間為10 s,采樣頻率為每通道100 Hz 的方式進行數據采集.通過開展重復性實驗,獲得氣動力精度.在實驗風速范圍內,升力系數的精度優于0.002,阻力系數的精度優于0.000 5.由于本文主要關注施加等離子體激勵前后的升阻力差量,因此未對測力數據進行修正.
在開展PIV 實驗時,激光器布置在風洞側面,激光片光與機翼弦向平面重合,定位于機翼中截面.CCD 相機布置在風洞頂端,攝像頭軸線與激光片光垂直相交于測量平面,如圖3 和圖4 所示.
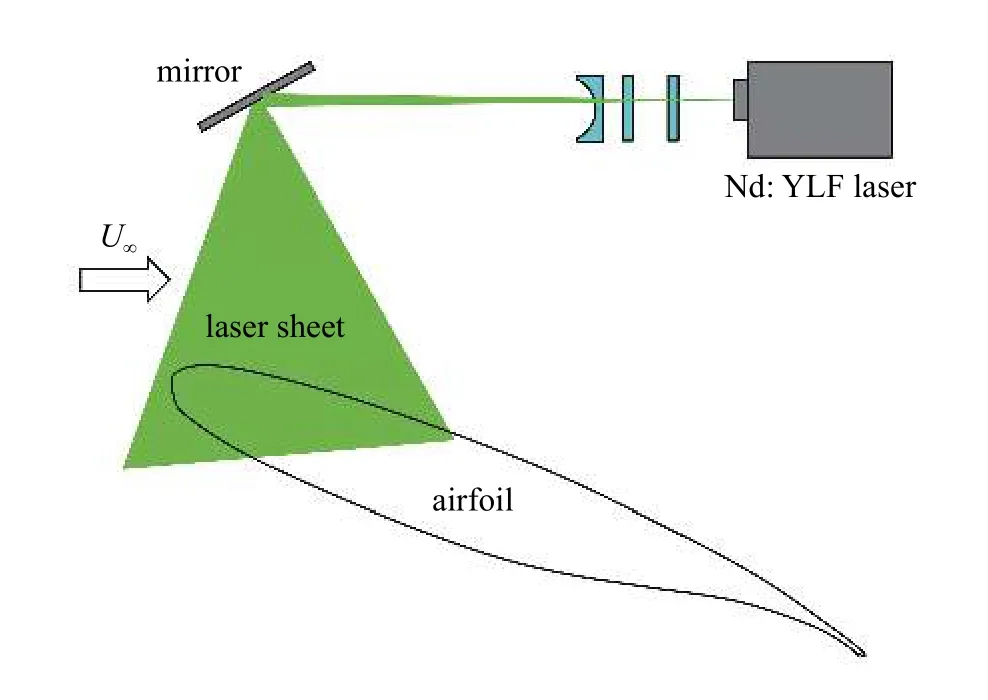
圖3 小尺度機翼PIV 實驗的設備布置圖Fig.3 Schematic of the PIV experimental setup for small size wing

圖4 布置在機翼上的激勵器布局示意圖Fig.4 Layout diagram of DBD plasma actuator arranged on the wing
采用整個金屬模型作為下層電極的方式開展等離子體流動控制.上層電極為銅箔膠帶,寬度為2 mm,展向長度為200 mm.上層電極的中心與翼型前緣重合.
1.4.2 大尺度模型實驗所用模型及支撐裝置
如圖5 所示,采用半模實驗裝置開展實驗.通過連接件將天平與模型相連.借助風洞下轉盤實現迎角變化.該裝置的迎角范圍: 0~ 360°,精度優于0.02°.通過墊塊的方式減少邊界層對測量結果的影響.墊塊與模型之間通過迷宮槽進行密封.

圖5 大尺度機翼測力實驗的設備布置圖Fig.5 Schematic of the force measurement setup for large size wing
采用與小尺度機翼相同的翼型剖面加工實驗模型.機翼由鋁制成.機翼的平均氣動弦長為500 mm,展長為1900 mm,其幾何尺寸剛好為小尺度機翼的5 倍.激勵器布置形式與小尺度機翼實驗相同,采用整個金屬模型作為下層電極的方式開展等離子體流動控制.上層電極為銅箔膠帶,寬度為2 mm,展向長度為1000 mm.上層電極的中心與翼型前緣重合.
采用BM500 半模盒式應變天平開展實驗.實驗前,通過天平校準架對該天平進行了靜態校準,標定結果如表2 所示.

表2 BM500 應變天平靜態標定結果Table 2 Static calibration results of BM500 balance
2 實驗結果與分析
2.1 靜止空氣下激勵器特性研究
圖6 給出了對稱布局激勵器誘導流場的時均速度場.將上層電極的中心作為坐標原點.實驗時,將采集2 s 的數據進行平均,從而獲得誘導流場的平均速度.由圖6 可知,(1)激勵器產生的射流與經典射流類似.但不同的是,等離子體激勵器誘導射流并沒有向流場內注入額外的質量流量.激勵器通過在壁面附近誘導產生等離子體,排開壁面的空氣,使得壁面壓力降低,從而將上層電極上方的空氣“拉拽”到壁面,形成射流.整個封閉空間內的質量流量并未增加;(2)由于采用對稱布局的形式,因此激勵器在上層電極的兩側產生兩股速度近似相等,方向相反的射流[42];(3)在黏性力的作用下,隨著切向距離的增加,射流的厚度逐漸增大.
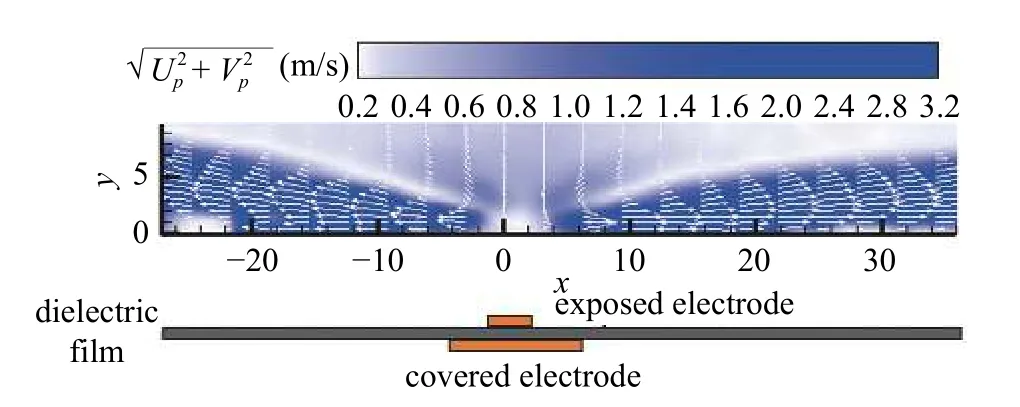
圖6 靜止空氣下對稱布局激勵器誘導流場的時均速度場Fig.6 Time-averaged velocity field generated by the symmetrical DBD plasma actuator in quiescent air
激勵器的消耗功率影響著等離子體流動控制技術的經濟性與應用前景.當機翼尺度增大時,電極沿展向的布置長度增加.為了在大尺度機翼上實現分離流控制,分析了激勵器的平均消耗功率隨電極長度的變化情況.實驗時,通過泰克P6015A 高壓探針與泰克TCP0030A 電流探針測量獲得多個周期內的電壓幅值與電流,然后將多個周期內的功率之和進行平均,從而獲得激勵器平均功率[43].
如圖7 所示,在不同電壓下,隨著電極長度的增加,激勵器消耗功率逐漸增大;其次,在本文研究的參數范圍內,激勵器消耗功率的增長率隨著電極長度的增加而逐漸減小.當電極長度達到一定閾值時,激勵器消耗功率將不再增加.閾值的大小與電壓、頻率等激勵參數有關.這種影響規律為開展大尺度模型等離子體流動控制提供了有力條件.即使模型尺度再大,電極長度再長,激勵器消耗功率也不會隨電極長度的增長而無限增加.
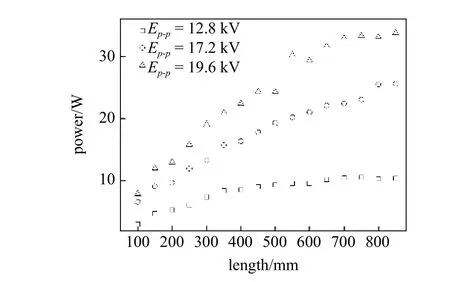
圖7 激勵器消耗功率隨電極長度的變化情況Fig.7 Power consumption of plasma actuator versus the length of electrodes
圖8 給出了3 種激勵電壓下,單位長度內激勵器消耗功率隨電極長度變化情況.從圖8 可以看出,隨著電極長度的增加,單位長度內的激勵器消耗功率逐漸減小.該結果與圖7 的變化規律吻合較好.

圖8 單位長度內激勵器消耗功率隨電極長度的變化情況Fig.8 Power consumption of plasma actuator in unit length versus the length of electrodes
2.2 小尺度機翼風洞實驗結果
在掌握激勵器特性的基礎上,開展了小尺度機翼風洞實驗.圖9 給出了在Re=3.30 × 105(U∞=50 m/s)的情況下,施加激勵前后,小尺度機翼升力系數及阻力系數隨迎角變化情況.由圖9 可知,當激勵器布置在機翼前緣時,等離子體激勵對線性段的升力系數影響較小;等離子體控制效果主要表現為推遲失速迎角、提高最大升力系數、減小失速區的阻力系數.施加激勵后,失速迎角推遲了4°,最大升力系數提高了12.8%.

圖9 施加激勵前后小尺度機翼升力系數與阻力系數隨迎角的變化情況Fig.9 Lift coefficient and drag coefficient of small size wing versus angle of attack with plasma actuation off and on.

圖9 施加激勵前后小尺度機翼升力系數與阻力系數隨迎角的變化情況(續)Fig.9 Lift coefficient and drag coefficient of small size wing versus angle of attack with plasma actuation off and on (continued)
2.3 大尺度機翼風洞實驗結果
在完成小尺度機翼風洞實驗的基礎上,開展了大尺度機翼的風洞實驗研究.兩次風洞實驗的雷諾數相同,風速不同.
圖10 給出了在Re=3.30 × 105(U∞=10 m/s)的情況下,施加激勵前后,大尺度機翼升力系數及阻力系數隨迎角變化情況.與小尺度機翼實驗類似,等離子體激勵推遲了機翼失速迎角,提高了最大升力系數.結果表明,施加等離子體控制后,失速迎角推遲了4°,最大升力系數提高了17.3%.
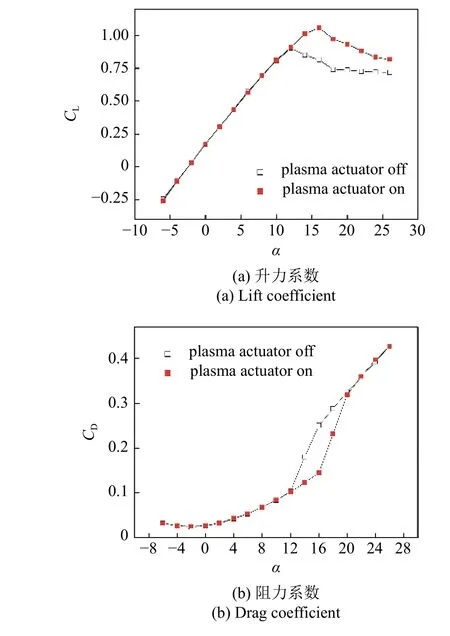
圖10 施加激勵前后大尺度機翼升力系數與阻力系數隨迎角的變化情況Fig.10 Lift coefficient and drag coefficient of large size wing versus angle of attack with plasma actuation off and on
2.4 尺度效應分析
本節通過對比兩種情況下的控制效果、能效比系數,分析機翼尺度對控制效果的影響.表3 總結了兩次實驗時等離子體激勵器提升的最大升力系數與推遲的機翼失速迎角.由表可知,在雷諾數相同的情況下,兩次實驗時通過等離子體激勵器獲得的控制效果相當.

表3 兩次實驗的控制效果對比Table 3 Comparison of control effects between two experiments
2.4.1 控制效果對比
圖11 給出了在兩次風洞實驗中,施加激勵后,最大升力系數的提升量與失速迎角的推遲量.由圖11可知,當雷諾數相同的情況下,機翼尺度對控制效果的影響較小.施加等離子體激勵后,最大升力系數的增量保持在12.8%以上,推遲的失速迎角均為4°.

圖11 施加激勵后提高的最大升力系數與推遲的失速迎角Fig.11 Increased maximum lift coefficient and delayed stall angle of attack after plasma actuation
2.4.2 能效比系數對比
能效比(即獲得的收益/消耗的功率)是評估激勵器工作效率,考核流動控制技術成熟度的關鍵指標.如何提高激勵器能效比,是流動控制技術實現工程化應用的難點.深入分析激勵器能效比是提升激勵器工作效率的重點.目前,在分離流等離子體流動控制研究領域還沒有針對能效比提出的無量綱參數.本文以文獻[44]中描述的消耗功率系數為基礎,針對分離流控制提出了等離子體激勵器能效比系數η.η=ΔCLmax/CE,其中ΔCLmax表示最大升力系數增量.CE代表激勵器消耗功率系數,公式如下

其中Pavg/m為單位長度內激勵器消耗功率,q∞為速壓,U∞為來流風速,c表示機翼平均氣動弦長.
圖12 給出了兩種工況下的能效比系數.由圖12可知,激勵器針對大尺度模型的流動控制效率更高.從能效比系數公式的分子、分母項來看,激勵器的這種表現主要由以下兩點原因形成,一是由于兩種工況下,激勵器的控制效果接近(如圖11 所示),因此,能效比系數公式中的分子項近似相等;二是結合單位長度內激勵器消耗的平均功率、模型弦長以及風速3 個因素,對于大尺度模型,單位長度內激勵器消耗的功率系數小于小尺度模型下激勵器消耗的功率系數.即大尺度模型下,激勵器能效比系數公式的分母項小于小尺度模型下激勵器能效比系數公式的分母項.因此,綜合上述兩點原因得出,大尺度模型等離子體流動控制的效率更高.

圖12 兩種工況下的能效比系數Fig.12 Energy consumption ratio coefficient under two cases.
另一方面,從電學特性研究結果分析(如圖8 所示),隨著電極長度的增加,單位長度內激勵器消耗功率在不斷降低.這些結果都預示著,對稱布局激勵器有望對真實飛機實現流動控制.
3 分離流控制機理探索
在分析機翼尺度效應前,通過PIV 實驗進一步探索了分離流對稱布局等離子體控制機理,驗證測力實驗結果.
3.1 時均流場
圖13 給出了在Re=3.30 × 105(U∞=50 m/s)的情況下,施加激勵前后,小尺度機翼繞流流場的平均速度場.由圖13 可知,施加激勵前,機翼繞流邊界層出現分離,壁面附近出現回流區;施加激勵后,氣流基本附著在機翼表面.流場結果與測力結果(如圖8所示)吻合.

圖13 施加激勵前后機翼時均流場的變化情況Fig.13 Time-averaged flow field around the wing with and without plasma (α=18°)
3.2 瞬時流場
圖14 給出了等離子體抑制機翼分離流的時空演化過程.如圖14(a)所示,剛開始激勵時,機翼繞流流場處于分離狀態;施加激勵后,等離子體增強了分離剪切層的不穩定性,從而誘導產生了大尺度的展向渦結構(如圖14(b)所示)[27,45];隨著時間的推移,展向渦不斷向下游發展,促進了外部高速氣流與邊界層低速氣流之間的摻混(如圖14(c)所示);當t=0.24 s 時,分離區的面積大幅減小,展向渦逐漸消失(如圖14(d)所示);當t=0.28 s 時,等離子體在壁面附近誘導出一系列的擬序結構(如圖14(e)所示);這些擬序結構不僅能促進主流與邊界層低速氣流之間的摻混,而且將能量從翼型前緣輸運到翼型后緣,從而實現了翼型全流場控制.當t=0.40 s 時,機翼繞流流場達到了準定常的狀態(如圖14(f)所示).


圖14 施加激勵后機翼繞流流場的時空演化過程Fig.14 Spatiotemporal evolution of flow field around the wing after plasma actuation (α=18°)
總的來看,施加對稱布局等離子體激勵后,機翼繞流流場經歷了流場分離、誘導展向渦運動發展、壁面擬序結構漂移運動、流場基本附著4 個階段.
4 結論
(1)靜止空氣下激勵器誘導流場特性: 對稱布局DBD 等離子體激勵器會在上層電極兩層產生兩股速度近似相等,方向相反的射流.與傳統壁面射流不同,等離子體誘導射流是無源射流,整個空間內的質量流量沒有增加;
(2)激勵器電學特性: 在本文研究的參數范圍內,隨著電極長度的增加,激勵器平均消耗功率的增長速率逐漸減緩.當電極長度達到一定閾值時,激勵器消耗功率將不再增加;
(3)激勵器控制機理: 施加對稱布局等離子體激勵后,機翼繞流流場經歷了流場分離、誘導展向渦運動發展、壁面擬序結構漂移運動、流場基本附著4 個階段.展向渦主要起促進主流與邊界層低速氣流摻混的作用;壁面擬序結構主要起到誘導動量從翼型前緣往翼型后緣輸運的作用;
(4)尺度效應: 一是在相同雷諾數下,機翼尺度對分離流控制效果影響較小;二是隨著機翼尺度的增加,能效比系數提高;大尺度機翼分離流等離子體控制的效率更高.
總的來看,隨著模型尺度增大,電極長度增加,單位長度內的激勵器平均消耗功率降低,在本文研究的參數范圍內,控制效果并未降低,能效比系數提高.這些結果為真實飛機的分離流等離子體控制提供了技術支撐.下一步將圍繞進一步提高等離子體可控機翼尺度、大幅降低電源體積與重量、開展大尺度無人機飛行驗證、深入探索等離子體流動控制機理等方面,開展系統研究,為該技術的工程化應用奠定基礎.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03