一種基于工業視覺的汽車密封件涂膠工作站研究*
2021-10-08 00:51:18韓健睿張瑞祺郭瑞蓮呂世霞
科技創新與應用 2021年27期
關鍵詞:系統
韓健睿,張瑞祺,郭瑞蓮,時 光,呂世霞,劉 傳
(1.北京工業大學,北京 100124;2.北京電子科技職業學院,北京 100176)
現今汽車制造企業總裝工藝中發動機裝配大多以人工裝置為主,油底殼涂膠方面人工作業有著涂膠不均、涂膠精度低、效率低等問題。進而引起汽車發動機漏油,嚴重的可能引起發動機損壞。而且膠體也會危害工作人員的身體健康,長期工作在此環境中將會引起多種疾病。鑒于以上人工作業現狀,本文設計并搭建了一套基于工業機器人的自動化汽車密封件涂膠工作站。
工業機器人在現今汽車制造行業中有著廣泛應用,如汽車噴漆、汽車結構焊接和沖壓過程中工件搬運等。工業機器人工作站通過搭配不同的工具手和工藝裝備,可實現不同的工作需求,而且工業機器人與原有人工相比,具有工作效率高、動作標準化程度高、穩定性強等優點,同時也降低了生產過程中的成本。
1 涂膠工作站結構設計
汽車發動機密封件自動涂膠系統以油底殼為例,主要由工業機器人、多功能工裝臺、工業機器人工具手、膠罐以及出膠控制系統組成。工業機器人根據本項目工作要求載重以及運動范圍,采用ABB IRB1410 型號工業機器人作為載體,在其上方配置相關設備以實現設計目的,如圖1 所示。
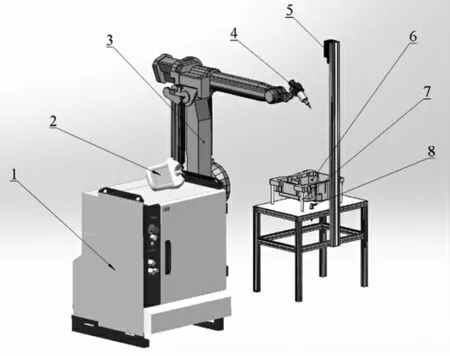
圖1 涂膠工作站機械結構三維圖
1.1 工裝臺設計
本文所設計的工業機器人工裝臺主要實現對油底殼外輪廓識別、定位和涂膠固定作用,在工廠中可采用工件傳送裝置,方便其上下料,提高工作效率。工裝臺上有6個定位銷,用于對油底殼進行擺放定位,并且便于相機識別后定位工件位置。背光光源用于輔助相機拍照過程中更好地識別工件外輪廓與螺絲孔位置。相機支架用于支撐相機滿足清晰識別油底殼輪廓并且不妨礙工業機器人的涂膠運動。光電傳感器用于檢測被涂膠工件是否到位。
1.2 涂膠工具手設計
本文所設計的涂膠工作站中將膠槍安裝于工業機器人第六軸法蘭上,并且以45°安裝。此方案中選擇的工業機器人自帶6 個自由度,可以在涂膠過程中出膠方向隨軌跡方向自由變換,實現靈活涂膠的目的。經過大量測試,工業機器人末端法蘭與膠槍呈45°夾角安裝出膠質量最好,可實現膠體直接落到工件表面,保證涂膠質量。
2 涂膠工作站控制系統設計
本文所設計的涂膠工作站控制系統包括:工業機器人控制器、工業視覺識別模塊、供膠系統、傳感器、控制按鈕等,如圖2 所示。工業機器人選用ABB 機器人控制系統,配備一個DSQC327AIO 信號拓展版,可以連接10 個數字量輸入信號、10 個數字量輸出信號和4 個模擬量輸出信號,滿足本工作站系統邏輯控制與運行的要求。工業機器人具體對工件進行涂膠工作,供膠系統實現工業機器人末端膠槍的膠體輸出,視覺識別用于對被涂膠工件外輪廓和螺絲孔進行識別定位,并規劃機器人運行路徑、控制按鈕控制工作站設備的啟動、暫停、停止、復位以及一些狀態顯示。整套工作站由啟動按鈕運行啟動,供膠系統開始運行,等待被涂膠工件到達相機識別工位,相機識別完成后,將點位信息發送至工業機器人,等待供膠系統準備就緒,工業機器人啟動涂膠程序,對工件進行涂膠作業。
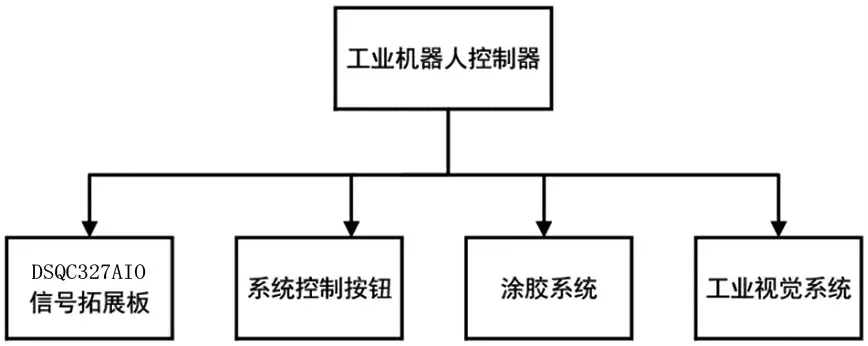
圖2 汽車密封件涂膠工作站系統組成
2.1 出膠裝置控制系統
為實現機器人涂膠作業,本文設計了全自動控制供膠系統,該系統由膠罐、氣動控制元件、氣源、膠槍等部件組成。膠罐用于存儲膠體,通過氣動控制元件壓縮空氣,使得膠體進入工業機器人末端所安裝的膠槍,氣源為本套系統提供0.6MPa 的壓縮空氣,使得整套系統正常運行,出膠系統首先由氣源提供兩路壓縮空氣,經過氣動二聯件,一路進入膠罐,增加膠罐中的壓力,使得膠體向外流至膠槍供膠管中;另一路氣源進入兩位五通電磁閥,通過機器人電信號控制氣流換向,控制供膠量和膠路開閉。膠槍開啟涂膠功能,膠體從膠槍中平滑流出。出膠系統原理圖如圖3 所示。
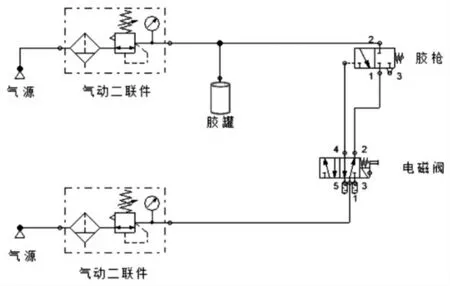
圖3 汽車密封件涂膠工作站出膠系統原理圖
2.2 工業視覺相機識別控制系統
本設計中采用康耐視IS2000C 型號相機,通過Modbus 通訊協議將相機拍照數據傳輸至工業機器人。利用機器人控制工裝臺底部光源可對工件輪廓、孔位進行更好的識別。通過相機識別軟件對機器人涂膠軌跡進行規劃,并將點位數據傳輸至機器人,根據預設的工件坐標系即可完成涂膠軌跡運行。相機識別畫面如圖4 所示。
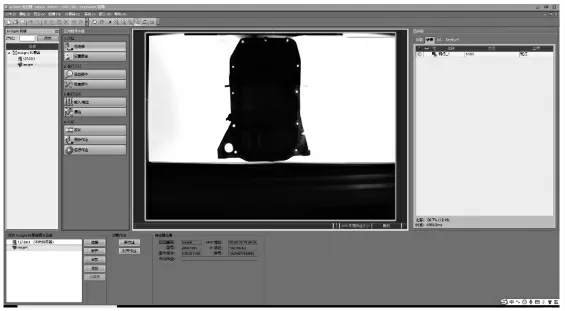
圖4 相機識別畫面
2.3 涂膠機器人整體控制邏輯與IO 控制
涂膠機器人根據本設計中的任務要求,除了與工業視覺相機進行網絡通信的同時,還需要與現場其他設備進行信號交互,通過在機器人程序中進行邏輯判斷,完成所設計的任務要求。工業機器人根據工裝臺工件到位傳感器信號啟動涂膠工作、控制出膠系統運行、儲膠罐系統膠量和運行狀態監控、視覺系統拍照與光源控制以及全自動運行過程中系統啟動停止外部控制按鈕的輸入信號。機器人IO 系統DSQC327A 信號板中包含數字量輸入端、數字量輸出端和模擬量輸出端。為了實現與機器人控制的外圍設備通信,可以使用數字量輸入端和輸出端控制外部設備的狀態檢測信息。涂膠機器人系統I/O 信號信息如表1 所示。
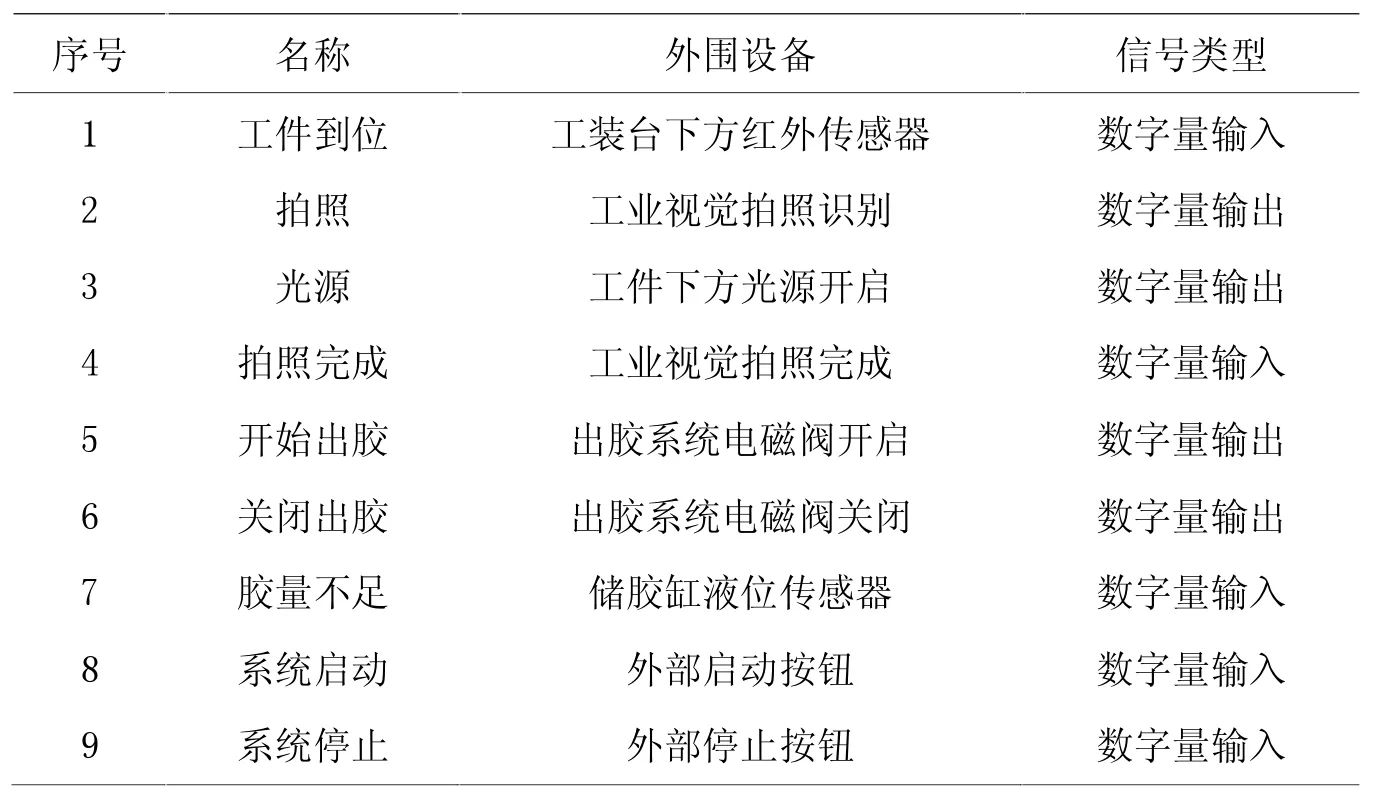
表1 涂膠機器人系統I/O 信號信息表
3 結論
(1)本文設計了一種自動汽車密封件涂膠機器人工作站,該機器人工作站可根據工業視覺相機進行路徑規劃,并且可自動控制供膠系統進行密封件涂膠作業。
(2)涂膠工作站中工業機器人與工業視覺通過Modbus 通信協議,將視覺系統所識別到的被涂膠工件輪廓根據螺絲孔位置可規劃機器人涂膠路徑點位。
(3)上述自動汽車密封件涂膠機器人工作站可廣泛應用于汽車制造工廠中,對制造業未來發展有著重要意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32