新型家用智能植物澆水裝置的結構設計與仿真
2021-10-05 12:53:00胡海霞于天生畢亮亮孟利民夏領兵
智能計算機與應用 2021年5期
胡海霞,于天生,畢亮亮,王 浩,孟利民,夏領兵
(1安徽理工大學機械工程學院,安徽 淮南232001;2安徽理工大學礦山智能裝備與技術安徽省重點實驗室,安徽 淮南232001)
0 引 言
新工業革命的背景下,各種智能化技術不斷發展進步,智能技術從制造業向傳統消費領域擴展。隨著科學技術力量的增強和人們生活水平的提高,智能家居已逐漸進入人們的生活[1]。人們越來越熱衷于在家或辦公室里種植各種花草凈化空氣,陶冶情操,營造良好的生活環境。然而,生活節奏加快,工作的繁忙或是外出旅游或者出差,這些花草經常處于被疏于打理或無人澆水的狀態,給愛花草的人帶來很多麻煩[2]。養花最重要的問題就是澆水問題。研究表明,花草80%以上的死亡是由于澆水不當引起的[3]。因此,設計一種家用智能植物澆水裝置具有重要的應用價值和現實意義。
目前市場上自動澆水裝置的種類比較多,如利用物理原理自動滲水;僅限于報警而不能進行澆水,相對比較經濟的缺水報警器以及能定時澆水的自動澆水系統等等[4]。總的來說,這些裝置的功能還不夠完善,工作效率不高,同時固定式澆花裝置影響環境美觀。因此,植物澆水裝置仍是目前非常必要的研究課題。澆水裝置是否方便可靠地運行主要取決于澆水裝置的輪子。本澆水裝置車輪全部采用麥克納姆輪,具有四輪獨立驅動,精密微動,精準定位等特點,可以在無需裝配車輪轉向裝置下實現車體的直行、側移、斜行、自轉等全方位移動。可以在有限的空間內靈活移動,工作效率高、操作便捷,同時可以針對不同植物進行合理的澆水。
1 家用植物澆水裝置的設計
家用智能植物澆水裝置主要由全向行走裝置、檢測裝置、視覺識別裝置、儲水裝置、噴灑裝置組成。為了提高運動系統的穩定性,全向行走裝置的移動平臺選擇矩形結構,底部有4個麥克納姆輪。麥克納姆輪是由若干個小滾子包絡成的圓形,每個小滾子都有一個與之相配的滾子軸,滾子軸安裝在輪轂上,每個滾子都可以繞與自身配對的滾子軸自由轉動,如圖1所示。全向移動平臺的上方有一矩形槽平臺,中間用銅柱隔開,用來放置電路、電源、傳感器等模塊。檢測裝置借鑒了機械手結構,其主要部件包括機械臂、舵機、氣缸以及濕度傳感器;視覺識別裝置通過攝像頭掃描二維碼獲得適合植物生長的土壤濕度信息,通過傳感器檢測土壤濕度;儲水裝置安裝在平臺上方開設的矩形槽內,矩形槽的大小與水箱外側的長度和寬度一樣,矩形槽的高度足以固定水箱;噴灑裝置主要是由灑水噴頭、壓力開關、管道等組成;潛水泵放置在水箱中,通過水管把潛水泵和花灑噴頭連接在一起;花灑噴頭固定在花灑支架上,并且可以繞定軸旋轉,方便調節噴灑的角度。利用Solidworks軟件三維建模并針對關鍵部件進行有限元分析。其機械結構整體設計如圖2所示。

圖1 麥克納姆輪外形結構Fig.1 Shape structure of the Mecanum Wheel

圖2 家用智能植物澆水裝置機械整體結構Fig.2 The whole mechanical structure of household intelligent plant maintenance device
2 澆水裝置的組成與分析
智能澆水裝置的檢測系統主要由水位監測單元、濕度檢測單元、系統主控單元、電閥門控制單元、穩壓供電單元等模塊構成。其中水位監測裝置可以在水量不足時及時補水,在水箱裝滿后自動斷水的效果。系統需要精確的了解到水箱中的水位信息,并及時做出反饋,系統水位檢測電路圖如圖3所示。

圖3 系統水位檢測電路圖Fig.3 Circuit diagram of water level detection system
通過濕度傳感器監測土壤濕度,利用傳感器顯示的數值與盆栽所需土壤濕度對比,小于所需數值則啟動自動澆水設備,打開水管閥門,及時供應水分;當達到預先設置的濕度值時,自動關閉閥門,停止供水。濕度檢測系統的電阻阻值比較電路圖如圖4所示。通過檢測輸出電壓值的大小來判斷土壤的干濕狀態,并通過LED燈顯示,若LED燈亮則表明土壤較濕潤,若LED燈不亮則表示土壤干燥。此功能能夠讓盆栽處于適宜的濕度。

圖4 濕度檢測系統的電阻阻值比較電路圖Fig.4 Comparison circuit diagram of resistance value of humidity measuring system
運動路徑的精確控制是完成對植物澆水的重要環節。目前,機器人導航系統中,常用慣性導航和激光雷達的組合的方式[5],并采用TOF(time of flight)激光測量方法。本裝置主要適用于在家庭、公寓、辦公室等場所,工作環境相對固定,可以通過激光雷達來建圖,獲得工作環境的相關信息。當雷達工作時,定位傳感器通過雷達掃描定位,獲得當前所在的位置以及姿勢,通過計算分析以獲得最佳的控制軌跡,從而實現對澆花裝置運動路徑的精確控制。
基于二維碼的快速視覺識別檢測技術實現視覺控制功能[6]。每株植物盆上均貼有二維碼,通過二維碼存貯相關植物的名稱、喜好、土壤濕度范圍等信息。當該澆水裝置到達預定的位置時,首先通過視覺系統掃描識別貼于花盆上的二維碼,獲得適合植物生長的土壤濕度范圍;然后機械手操控濕度傳感器檢測土壤濕度;若檢測到的濕度不在植物最佳生長范圍,根據檢測到的濕度與最佳濕度的差值,確定澆水量,潛水泵工作,通過花灑噴頭澆水。若不需要澆水則繼續檢測下一個植物。若裝置未檢測到二維碼,則會在15s后移動到下一植物。機器在完成工作后,會從終點位置回到起點。該裝置每天檢測一次。為保證任務的正常進行,水箱內的水位傳感器會時刻檢測水箱內的水量,若水箱內的水量未達到要求的澆水量,機器則會返回起點進行補水。
本澆水裝置的矩形全向移動平臺由4個麥克納姆輪組成,每個麥克納姆輪由一個電機單獨驅動。Mecanum輪是一種性能優越,應用廣泛的全方位移動機構,可以在狹小的工作空間內靈活地實現三自由度運動,通過這3個自由度的組合,使平臺整體在姿態保持不變的情況下,沿任意路徑到達目標位置,能夠很好地完成項目要求。工作時,由電池給4個電機供電,電機輸出軸轉動,電機的輸出軸和麥克納姆輪通過法蘭固定在一起,電機轉動帶動4個麥克納姆輪旋轉。由于4個輪子分別由4個電機操控,因此4個輪子可以有不同的轉速,通過控制電機不同的轉速和轉向,4個麥克納姆輪的速度合成之后,則可以實現隨意的控制澆花裝置的行進位置[7]。
圖5所示為地盤輪子標號示意圖,為了方便計算,定義全向底盤的輪距為2a,軸距為2b。 可見,麥克納姆輪通過4個輪子不同速度的組合,全向輪底盤能產生不同的作用力,從而有不同的運動效果。如果想要精確的控制運動軌跡,那么就需要了解4個輪子中心的運動速度。假設為輪子軸心的運動速度矢量;為麥克納姆輪軸心沿垂直于r的方向的速度分量為全向輪底盤的運動方向矢量,全向輪底盤的逆運動學方程為式(1)[7]:
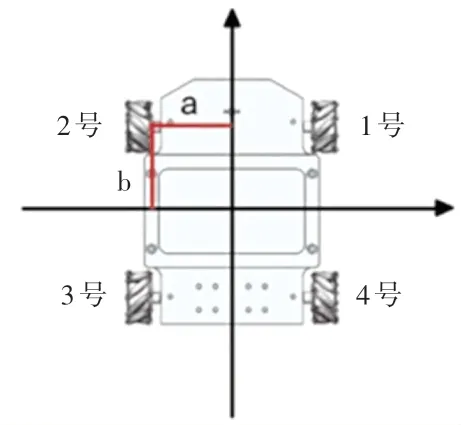
圖5 地盤輪子標號示意圖Fig.5 Schematic diagram of the turf wheels’label

其中,ω為電機的轉速,將全向輪的運動方向和自傳速度帶入到逆運動學方程,可得4個電機對應的轉速,從而可以精確控制全向底盤的運動軌跡。當更改輸入量為行進的方向θ(設以X軸正方向為0°),可得式(2):

其中,v為行進的速度,ω為自旋的角速度。輸入量不同,逆運動學的方程表達式形式也不同,但是最后的結果都是為了得到4個輪子的各自的轉速,實現確定的運動軌跡。
3 家用植物澆水裝置的仿真分析
3.1 移動平臺仿真分析
利用SolidWorks中的插件simulation進行靜力學仿真。在有限元分析中,為了便于計算和分析,對模型進行了簡化,用外力代替水箱,提高了運算效率。由于車身間沒有相對運動,故這將矩形槽平臺、底板、銅柱、電機、法蘭定義接觸為接觸接合;同理,將滾子軸,輪轂定義為結合;將輪轂與法蘭之間添加銷釘鏈接,不產生相對移動。連接定義完成后,對澆花裝置添加引力和施加430 N的外部載荷。
全向移動平臺靜應力分析圖如圖6所示。可見,最大應力發生在麥克納姆輪輪轂與滾子軸的配合處,且 在 外 載 荷 為430 N時,最 大 應 力 為92.14 MPa,顯然在靜應力時滿足要求。因此,滾子軸和輪轂的材料選擇合金鋼,在澆花裝置運動時,同樣能夠滿足要求。移動平臺位移圖如圖7所示。可見,澆花裝置的最大形變發生在矩形槽平臺中部,且最大位移約為0~16 mm,變形可忽略不計,該變形不會影響澆花裝置工作的穩定性。

圖6 全向移動平臺的靜應力分析圖Fig.6 Static stress analysis diagram of the omni-directional mobile platform

圖7 全向移動平臺位移圖Fig.7 Displacement diagram of the omni-directional mobile platform
3.2 花灑平臺仿真結果分析
花灑平臺的靜應力分析圖如圖8所示。可見,最大應力處為麥克納姆輪輪轂與滾子軸的配合處。因此,當花灑上的載荷和全向移動平臺上的載荷綜合作用時,危險截面亦為麥克納姆輪與滾子軸的配合處,通過分析可知該處應力值遠小于合金鋼的許用應力,因此構件在運轉中是安全的。花灑平臺位移圖如圖9所示。可見,花灑平臺的最大形變位移發生在花灑平臺兩端頂點處,且最大位移約為0~19 mm,該變形與實際尺寸相比可忽略不計,不會影響澆花裝置工作的穩定性。
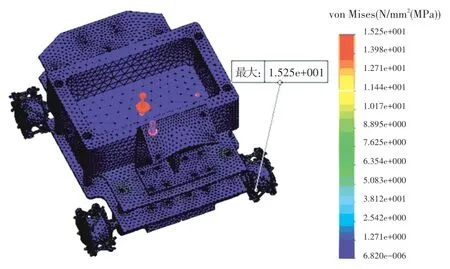
圖8 花灑平臺靜應力分析圖Fig.8 Static stress analysis diagram of the spraying platform

圖9 花灑平臺位移圖Fig.9 Displacement diagram of the spraying platform
4 結束語
隨著科技的進步,人們的生活水平不斷提高,家居智能化給人們的工作,生活和觀念帶來巨大的變化。本文所設計的家用智能花草澆水裝置具有高度的智能性。利用濕度傳感器測量土壤的濕度,并將濕度信息反饋給養護裝置;通過麥克納姆輪的全向移動平臺實現任意方向的運動,運行方式可靠。該裝置總體結構簡單,成本較低,效率較高,便于移動,在較小的空間內也能很好的進行工作。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
少兒科學周刊·兒童版(2017年5期)2017-06-29 22:24:28
少兒科學周刊·兒童版(2017年5期)2017-06-29 16:46:33
紅領巾·萌芽(2017年5期)2017-06-23 10:35:59
爆笑show(2016年7期)2017-02-09 09:36:13
海峽科技與產業(2016年3期)2016-05-17 04:32:12
