基于氣壓控制的多功能新型機械手設計
2021-09-29 16:43:41錢書生高希
國際商業技術 2021年11期
關鍵詞:結構設計
錢書生 高希
摘要:針對傳統機械手在夾持時存在的問題,設計了一種基于氣壓控制的多功能新型機械手。首先詳細闡述了多功能機械手的整體結構和創新設計,接著通過具體數據與理論分析,得出整個裝置的可行性。最后得出結論:與傳統的機械手夾持方式相比較,基于氣壓控制的多功能新型機械手不僅能夠適應多種場合的復雜情況,而且可以增強抓取穩定性,實現氣壓控制。該裝置與傳統方式相比較提高了生產效率,更有利于提高企業的效益,促進社會生產力的發展。
關鍵詞:機械手;結構設計;氣壓控制
1引言:
在科技日新月益的情況下,機械手已經廣泛應用于各種領域,在軍事、醫療、娛樂,甚至在工業生產線上都起到了很大作用。例如:在醫療藥品的配制過程中會涉及到有毒的物質,如果醫護人員處理不當就會對自己的身體健康產生危害。機械手的使用可以代替人手來執行各種操作和命令。既可以高效高質的完成作業,也保障了醫護人員的健康問題。[1]
傳統機械手都是等長手爪,平行或多角度向內夾取,它們在夾取不同形狀、不同大小的物體時會產生夾不牢或夾不住的情況,此外在處理一系列復雜操作時會由于機械手所能運動的位移和轉角范圍而產生一定的限制。結合當前國內外柔性機器人的迅猛發展之勢,我國柔性機械手已出現采用柔性氣囊和海綿吸盤等進行柔性貼合的裝置[2],對傳統的問題進行了改良。本裝置在手部結構增加了輔助機械指,采用雙層包合設計,由氣壓原件控制,可以根據不同形狀的物體進行調整,增大接觸面積和接觸穩定性,這樣既增強了抓取的穩定性,還減少了對物體的壓力,提高了夾取的適用范圍。
2整體結構及創新設計
2.1整體結構
1.確定機械臂自由度:
工業機器人基于對定位精度和重復定位精度以及結構剛性的考慮,往往體積龐大,負荷能力與其自重相比往往非常小。一般通用機械手有5~6個自由度即可滿足使用要求。在滿足前提條件上盡量使結構簡單,本裝置采用5自由度機械手進行設計。
2.選擇機械手基本形式:
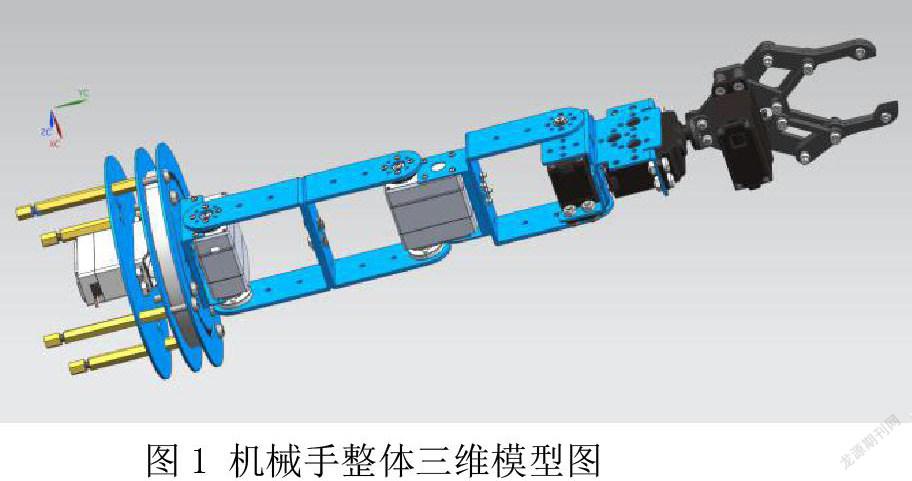
機械手基本形式有直角坐標型機械手、圓柱坐標型機械手、球坐標型機械手和多關節型機械手。[3]其中多關節型機械手手臂類似人的上肢關節動作,具有三個回轉關節,運動軌跡緊湊,適合于各種場合的工作,故本裝置選取多關節型機械手形式進行設計(如圖1為整體結構圖)。
3.機械手手部結構設計:
有如下設計要求[4]:(a)有適當的夾緊力;(b)有足夠的開閉范圍;(c)力求結構簡單,重量輕,體積小;(d)手指應有一定的強度和剛度,因此要選擇合適的手部材料。
對不同用途的機械手,應當選取不同的材料,但是無論那種場合,都要對機械手進行受力分析與強度校核,以保證手部結構的穩定性和可靠性。在裝置中采用橡膠作為表面材料,可以提高接觸摩擦力和夾取穩定性。
2.2創新設計
1.對機械手手部結構進行分析,確保目標物可以被穩定夾持。
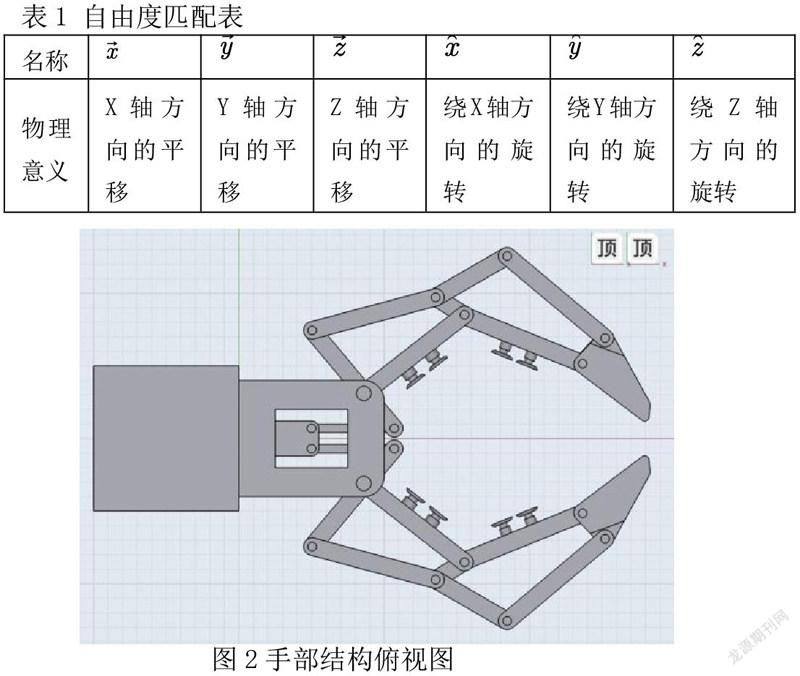
在物體內選取任意一點,建立空間三維直角坐標系,考慮到物體在三維空間內的自由度為:,只有當六個自由度都被限制,物體才能機械手才能被穩定夾持。因此裝置機械手在手部結構增加了輔助機械指(如圖2中標注部分),由氣壓原件控制,可以伸長縮短,根據物體的任意性質進行調整,多點接觸用來保證物體的自由度都被限制。
2.機械手各個關節可以使用角度舵機連接,從而實現定角度旋轉,整體可以使用單片機調控。
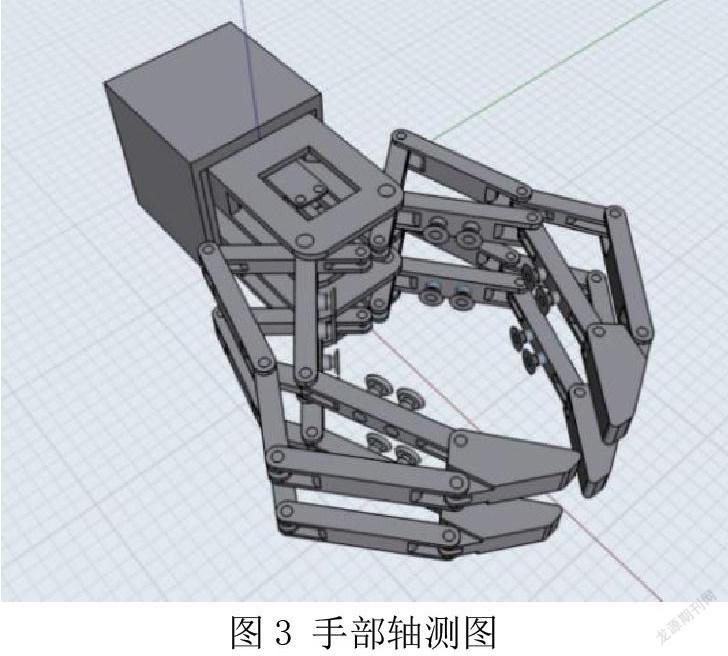
3.考慮到目標夾持物有一定高度,可以對機械手進行改進,手部結構使用雙層保證足夠的接觸面積,增強夾持穩定性(如圖3)。
3可行性分析
3.1數值分析推導可行性
以注塑加工進行分析:按每人每月800元工資,每臺注塑機24小時生產,每天三班制計算。每臺注塑機每月需要花費人工費用:元,年工資為28800元,3臺注塑機需要年人工費用86400元。使用機械手后一個人可以管理至少3臺注塑機,按3臺計算,那么一天只要1個人可以管理3臺注塑機,那么花費的月人工費用為2400元,年費用為28800元,與純人工相比可以節省57600元。[5]
實際上一個注塑工人的每月花費遠遠不止800元,隨著社會保障制度的健全和完善,費用就要成倍的增加。其次工人會出現缺勤等特殊狀況,而用了機械手,該類情況就不會干擾到工廠的正常生產。最后考慮到維修等情況,一個機械手的成本可以控制在10000元左右,因此保守估計1年之內就可以收回所有的機械手投資。以上參數按一般正常情況下作出的,實際情況按實際生產為準。
3.2理論推導可行性
3.2.1裝置特點:
1.經濟方面:適用于很多領域場合,各個部分的成本較低,可以被消費者接受,經濟效益可觀。
2.適用范圍:可以用于實驗室抓取腐蝕性物質,在醫藥領域運送藥品,也可以用于自動化生產線,適用范圍廣。
3.市場方面:由于勞動力的緊缺,勞動力昂貴,部分領域迫切需要搭建自動化生產線代替手工,減輕成本,更加適應市場的需求。
3.2.2裝置優勢:
1.使用多功能新型機械手用于生產中能夠大大縮短勞動時間,提高生產效率,降低廢品率。
2.基于氣壓控制的多功能新型機械手可以大幅度減少雇傭成本,增加生產穩定性。還可以用于一些特殊場合的抓取,增大了企業市場競爭力。
3.基于氣壓控制的多功能新型機械手順應當今機械自動化潮流,推進自動化產業的發展和進步。
4結束語
基于氣壓控制的多功能新型機械手在盡可能減少人工操作的基礎上,采用了機電一體化,雙層包合技術實現智能夾取,成本中等,適用的夾取場合和夾取范圍廣。本裝置在機械手部結構中增加了輔助機械指,有氣壓控制,可以根據夾取物體的實際情況進行柔性的夾取,可以降低公司為購買專用機械手的成本,符合企業發展的需要。理論分析表明,該機械手的機構合理,強度滿足要求,經試驗檢驗對于不同場合不同要求的抓取命令的適應性好,對機械手的廣泛運用起到了積極作用,所以該裝置具有良好的應用前景和推廣價值。[6]
參考文獻
[1]孟彩茹,張高青,李夏楠,李強.夾持機械手爪機構的設計與優化[J].機械設計與制造,2016(06):70-74.
[2]郝子宜,李金帥,徐漢斌.家用柔性機械手設計[J].2021,34(06):99-101.
[3]創盈時代科技.四種常見的機械手特點介紹[EB/OL] https://baijiahao.baidu.com/s?id=1607676224313169254&wfr=spider&for=pc
[4]康道智能.桁架式機器人手爪設計要求 [EB/OL] https://www.sohu.com/a/194935393_793597
[5]原創力文檔.注塑機專用機械手的研究及應用[EB/OL] https://max.book118.com/html/2017/0115/83881549.shtm
[6]李龍,黃宇珩,李毓雯.基于自動控制技術的仿生無人化蘋果收集機器人設計[J].無線互聯科技,2021,18(11):60-61.
作者簡介:
錢書生(2000-),男,漢族,江蘇連云港人,江蘇大學本科在讀,機械設計制造及其自動化專業。
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23