基于功能安全要求的線控轉(zhuǎn)向系統(tǒng)開(kāi)發(fā)及驗(yàn)證
2021-09-29 08:32:04常秀巖高尚姜廷龍侯慧賢張建偉
汽車(chē)技術(shù) 2021年9期
常秀巖 高尚 姜廷龍 侯慧賢 張建偉
(1.中國(guó)第一汽車(chē)股份有限公司研發(fā)總院,長(zhǎng)春 130013;2.汽車(chē)振動(dòng)噪聲與安全控制綜合技術(shù)國(guó)家重點(diǎn)實(shí)驗(yàn)室,長(zhǎng)春 130013;3.吉林大學(xué),汽車(chē)仿真與控制國(guó)家重點(diǎn)實(shí)驗(yàn)室,長(zhǎng)春 130022)
主題詞:線控轉(zhuǎn)向 功能安全 系統(tǒng)架構(gòu) 硬件架構(gòu) 系統(tǒng)狀態(tài)機(jī)
1 前言
線控轉(zhuǎn)向(Steering-by-Wire,SBW)具有靈活的可變傳動(dòng)比,能夠?qū)崿F(xiàn)中高車(chē)速下的穩(wěn)定性及低速下的操作方便性,使駕駛員獲得更加良好的駕乘體驗(yàn)。但線控轉(zhuǎn)向最大的問(wèn)題是如何保證系統(tǒng)的安全性。受安全性及GB 17675—1999《汽車(chē)轉(zhuǎn)向系基本要求》(已經(jīng)廢止)的限制[1],SBW系統(tǒng)僅在個(gè)別車(chē)型上進(jìn)行了配置,但也采用了電磁離合器方案作為替代轉(zhuǎn)向中間軸的機(jī)械備份。GB 17675—2021《汽車(chē)轉(zhuǎn)向系基本要求》(即將實(shí)施)刪除了“不得裝用全動(dòng)力轉(zhuǎn)向機(jī)構(gòu)”的要求[2],SBW屬于全動(dòng)力轉(zhuǎn)向的范疇,該標(biāo)準(zhǔn)的發(fā)布使SBW系統(tǒng)具備了應(yīng)用的可能,同時(shí)增加了“對(duì)轉(zhuǎn)向電子控制系統(tǒng)的功能安全要求”,從功能安全的角度提出了明確的安全性要求。
針對(duì)線控轉(zhuǎn)向的功能安全,王杰等就線控轉(zhuǎn)向傳感器故障診斷與容錯(cuò)展開(kāi)了研究[3],Taeyun Koo 等人也對(duì)線控轉(zhuǎn)向的路感模擬與轉(zhuǎn)向執(zhí)行雙冗余架構(gòu)展開(kāi)了研究[4]。本文從功能安全的角度分析線控轉(zhuǎn)向系統(tǒng)的潛在風(fēng)險(xiǎn),并提出供參考的功能安全目標(biāo),以失效可操作(Fail-Operational)冗余機(jī)制為指導(dǎo)思想設(shè)計(jì)滿足整車(chē)需求的線控轉(zhuǎn)向系統(tǒng)架構(gòu)、硬件架構(gòu)及軟件控制策略,并進(jìn)行實(shí)車(chē)驗(yàn)證。
2 線控轉(zhuǎn)向系統(tǒng)基本結(jié)構(gòu)
線控轉(zhuǎn)向系統(tǒng)主要由綜合控制器、路感模擬器及轉(zhuǎn)向執(zhí)行器組成,如圖1所示。
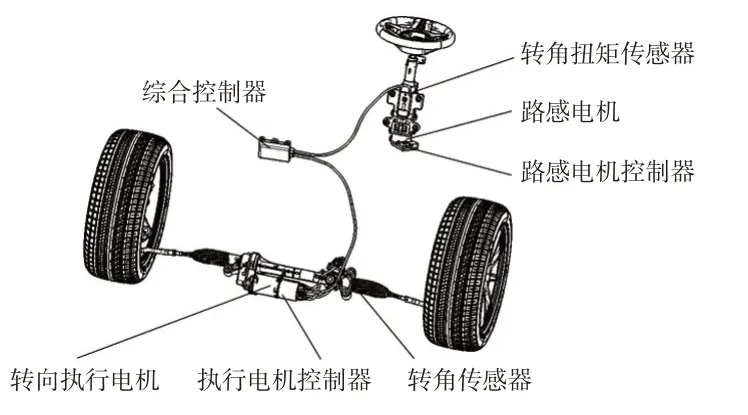
圖1 線控轉(zhuǎn)向系統(tǒng)基本結(jié)構(gòu)
線控轉(zhuǎn)向系統(tǒng)中控制器較多,且無(wú)法進(jìn)行取代,同時(shí)參考博世的電子電氣架構(gòu)技術(shù)戰(zhàn)略圖[5](見(jiàn)圖2)及整車(chē)需求,在當(dāng)前階段采用域中心控制器的架構(gòu)設(shè)計(jì)。

圖2 博世的電子電氣架構(gòu)技術(shù)戰(zhàn)略[5]
綜合控制器負(fù)責(zé)線控轉(zhuǎn)向系統(tǒng)綜合控制,對(duì)路感模擬器及轉(zhuǎn)向執(zhí)行器分別發(fā)出轉(zhuǎn)矩及轉(zhuǎn)角執(zhí)行的信號(hào)請(qǐng)求,同時(shí)負(fù)責(zé)與整車(chē)及SBW系統(tǒng)內(nèi)部的信息傳遞。
路感模擬器由轉(zhuǎn)角扭矩傳感器、路感電機(jī)及其控制器組成,其中,轉(zhuǎn)角扭矩傳感器負(fù)責(zé)轉(zhuǎn)角及扭矩的信號(hào)獲取,路感電機(jī)控制器接收綜合控制器的扭矩請(qǐng)求,控制路感電機(jī)實(shí)現(xiàn)路感控制,同時(shí)向綜合控制器反饋轉(zhuǎn)角及扭矩信息。
轉(zhuǎn)向執(zhí)行器由轉(zhuǎn)角傳感器、執(zhí)行電機(jī)及其控制器組成,其中,轉(zhuǎn)角傳感器負(fù)責(zé)轉(zhuǎn)角信號(hào)獲取,執(zhí)行電機(jī)控制器接收綜合控制器的轉(zhuǎn)角請(qǐng)求,控制執(zhí)行電機(jī)實(shí)現(xiàn)轉(zhuǎn)角控制,同時(shí)向綜合控制器反饋轉(zhuǎn)角及扭矩信息。
3 線控轉(zhuǎn)向系統(tǒng)功能安全目標(biāo)
3.1 轉(zhuǎn)向功能安全目標(biāo)
線控轉(zhuǎn)向系統(tǒng)作為轉(zhuǎn)向系統(tǒng)的拓展,其功能安全要求與電動(dòng)助力轉(zhuǎn)向(Electric Power Steering,EPS)系統(tǒng)的功能安全要求具有一定的繼承性和獨(dú)立性,因此在設(shè)計(jì)線控轉(zhuǎn)向功能安全目標(biāo)時(shí)的場(chǎng)景分析、危害辨識(shí)、汽車(chē)安全完整性等級(jí)(Automotive Safety Integration Level,ASIL)評(píng)估可以參考EPS 系統(tǒng)設(shè)計(jì)經(jīng)驗(yàn),每一部分均具有一定的關(guān)聯(lián)性[6-7]。
在EPS的設(shè)計(jì)過(guò)程中,需考慮的轉(zhuǎn)向系統(tǒng)潛在危險(xiǎn)如表1所示。
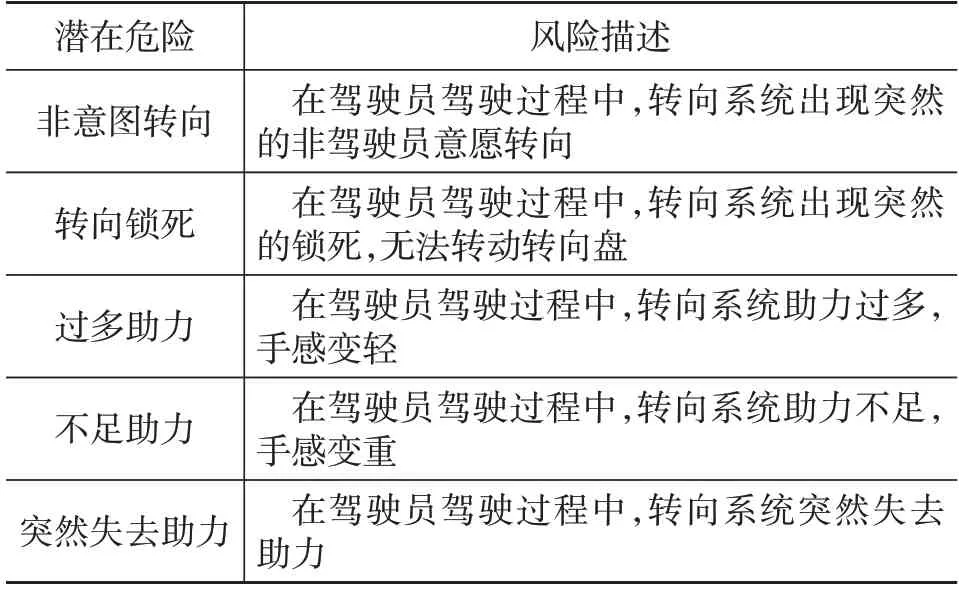
表1 轉(zhuǎn)向系統(tǒng)潛在風(fēng)險(xiǎn)
對(duì)于潛在風(fēng)險(xiǎn),ISO 26262:2018《道路車(chē)輛功能安全》從以下3 個(gè)方面進(jìn)行評(píng)估ASIL 等級(jí):故障對(duì)駕駛員、乘客、行人以及道路中涉及的車(chē)輛所帶來(lái)危害的嚴(yán)重程度(Severity,S);人員和車(chē)輛暴露在系統(tǒng)失效可能發(fā)生場(chǎng)景的概率(Exposure,E);駕駛員在事故發(fā)生時(shí)通過(guò)采取措施對(duì)可能造成傷害的人員和車(chē)輛危害的控制能力(Controllability,C)。這3個(gè)因子的具體等級(jí)分類(lèi)如表2所示。
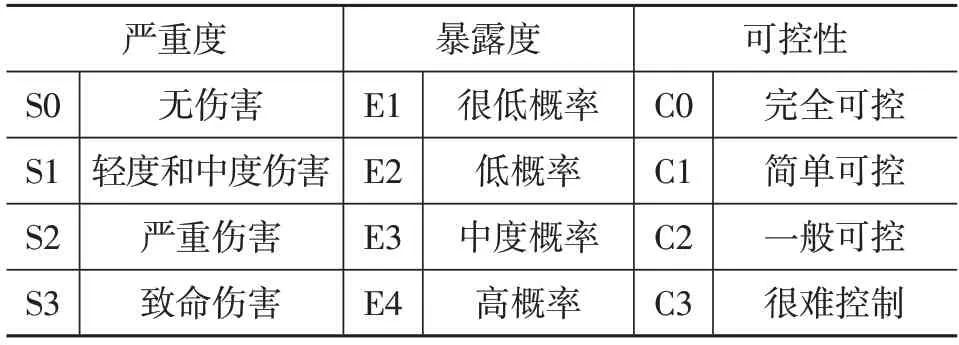
表2 嚴(yán)重度、暴露度、可控性分類(lèi)
對(duì)于系統(tǒng)確認(rèn)的每一項(xiàng)危險(xiǎn),首先基于表2確定嚴(yán)重度、暴露度、可控性的等級(jí),然后根據(jù)各等級(jí)的值對(duì)照表3確定系統(tǒng)的ASIL等級(jí)。其中A~D均為與安全相關(guān)的等級(jí),D表示安全要求最高,A表示安全要求最低,QM級(jí)別不需考慮系統(tǒng)功能安全方面的要求。對(duì)影響因素為S0、E0、C0的任何系統(tǒng)不進(jìn)行ASIL評(píng)級(jí)。
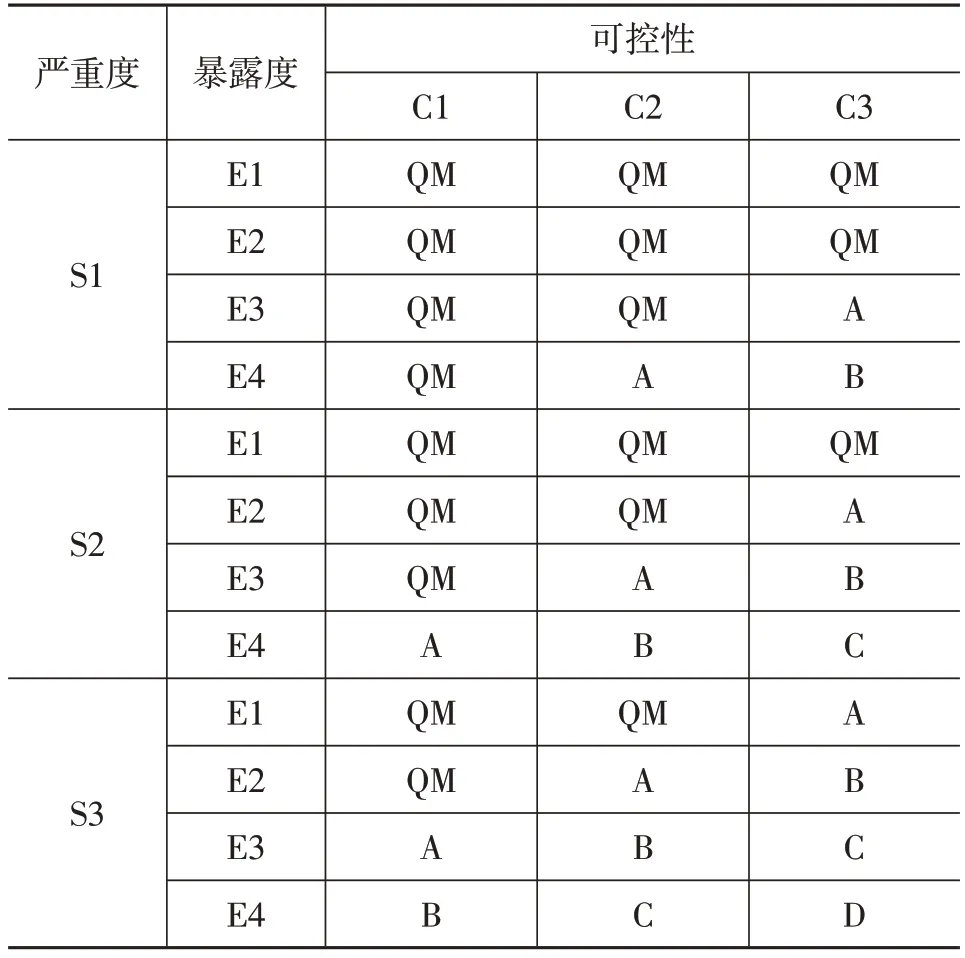
表3 ASIL等級(jí)確定
基于分析得到EPS 系統(tǒng)的功能安全目標(biāo)如表4 所示。
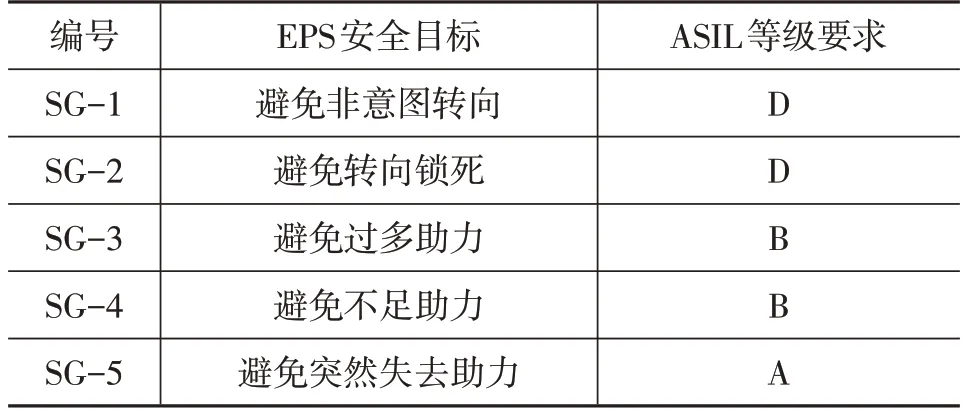
表4 EPS功能安全目標(biāo)
3.2 SBW功能安全目標(biāo)
線控轉(zhuǎn)向系統(tǒng)取消了中間軸機(jī)械連接,因此,需要對(duì)EPS的安全目標(biāo)進(jìn)行修正,線控轉(zhuǎn)向系統(tǒng)安全目標(biāo)如表5所示。
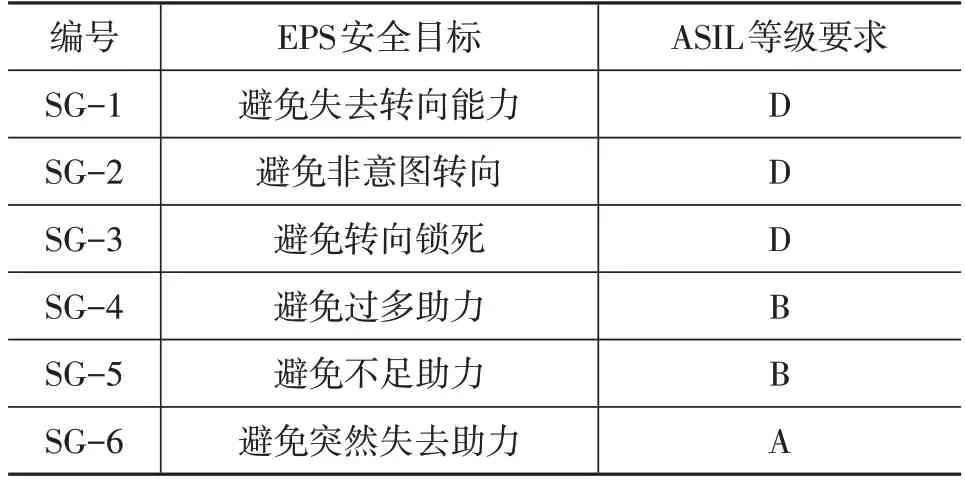
表5 SBW功能安全目標(biāo)
4 基于功能安全要求的系統(tǒng)設(shè)計(jì)
根據(jù)SBW的功能安全目標(biāo)提出功能安全要求并進(jìn)行SBW的系統(tǒng)級(jí)架構(gòu)設(shè)計(jì),同時(shí)對(duì)綜合控制器、路感電機(jī)及控制器、轉(zhuǎn)向執(zhí)行器及控制器、傳感器、電源、CAN總線等硬件進(jìn)行系統(tǒng)設(shè)計(jì)分析。
4.1 SBW系統(tǒng)功能安全要求
基于安全目標(biāo)的SBW 系統(tǒng)功能安全要求如表6 所示。

表6 功能安全要求
4.2 系統(tǒng)架構(gòu)及通訊架構(gòu)設(shè)計(jì)
功能安全對(duì)綜合控制器、路感模擬器、轉(zhuǎn)向執(zhí)行器及傳感器提出了設(shè)計(jì)要求,從系統(tǒng)架構(gòu)上進(jìn)行整體設(shè)計(jì)[8],滿足功能安全要求的SBW系統(tǒng)架構(gòu)如圖3所示。
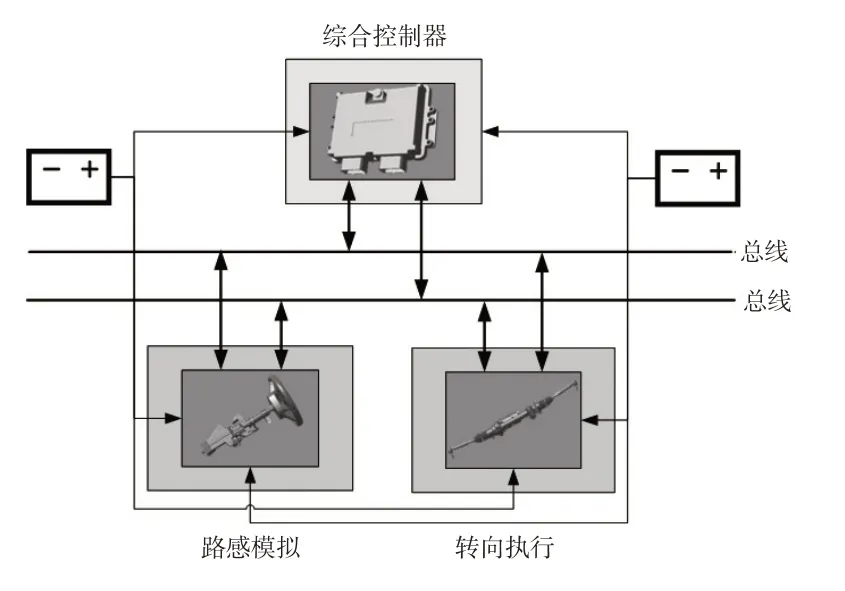
圖3 SBW系統(tǒng)架構(gòu)
系統(tǒng)架構(gòu)主體的設(shè)計(jì)基于Fail-Operational的思路,從系統(tǒng)架構(gòu)層面對(duì)綜合控制器、路感模擬器、轉(zhuǎn)向執(zhí)行器及傳感器均進(jìn)行備份設(shè)計(jì),各部分的架構(gòu)概述如表7所示。
4.3 控制器硬件架構(gòu)設(shè)計(jì)
從上述系統(tǒng)架構(gòu)描述可以看出,SBW 系統(tǒng)中設(shè)計(jì)的3 個(gè)控制器,即綜合控制器(Central Control Unit,CCU)、路感模擬控制器(Hands Wheel Unit,HWU)、轉(zhuǎn)向執(zhí)行控制器(Road Wheel Unit,RWU)均采用冗余設(shè)計(jì)思想,思路較為一致。本文以RWU作為展開(kāi)對(duì)象,對(duì)控制器硬件設(shè)計(jì)進(jìn)行分析,控制器樣板如圖4 所示,控制器硬件架構(gòu)如圖5所示。
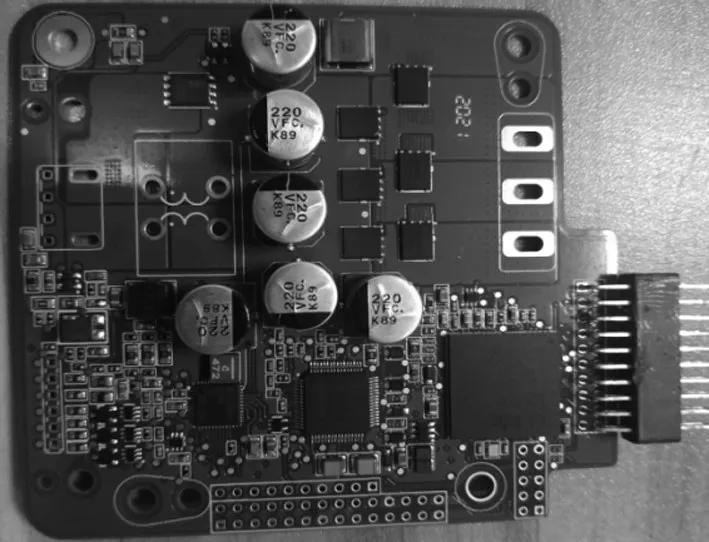
圖4 控制器樣板
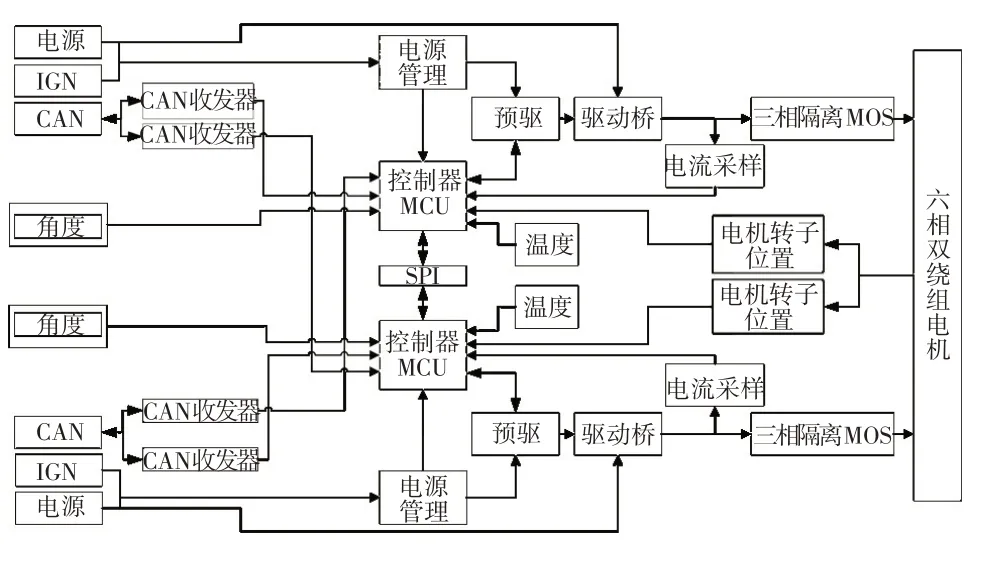
圖5 SBW硬件架構(gòu)
從圖5中可以看出,硬件設(shè)計(jì)方案完全滿足前文所述的架構(gòu)要求,采用了冗余設(shè)計(jì)方案。雙MCU 接收外部輸入信號(hào)后進(jìn)行處理,分別控制六相雙繞組電機(jī)的三相,實(shí)現(xiàn)控制輸出,同時(shí)雙MCU內(nèi)部通過(guò)串行外設(shè)接口(Serial Peripheral Interface,SPI)進(jìn)行通訊,保證雙MCU的實(shí)時(shí)性,以便一路出現(xiàn)故障后另一路可以完全介入開(kāi)展工作,保證系統(tǒng)冗余。
4.4 控制器硬件原理設(shè)計(jì)
基于線控轉(zhuǎn)向的功能安全等級(jí)要求,在控制器硬件選型上必須滿足功能安全ASIL D 的等級(jí)要求,然后針對(duì)硬件選型結(jié)果進(jìn)行控制器硬件原理設(shè)計(jì),如圖6 所示。
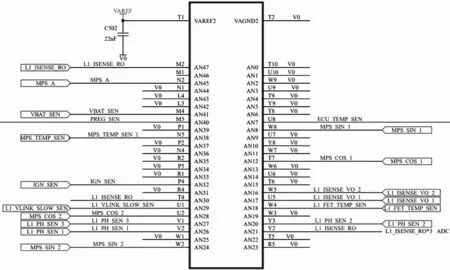
圖6 SBW部分硬件原理
4.4.1 主控芯片
主控芯片MCU 選用英飛凌AURIX 系列,此芯片滿足功能安全要求,且具備可編程硬件安全模塊(Hardware Security Modules,HSM),安全等級(jí)高;通過(guò)模擬數(shù)字轉(zhuǎn)換器(Analog-to-Digital Converter,ADC)端口采集電壓、溫度等模擬信號(hào);通過(guò)I∕O端口采集傳感器信號(hào),輸出控制開(kāi)關(guān)信號(hào);通過(guò)脈寬調(diào)制(Pulse Width Modulation,PWM)模塊輸出全橋PWM 控制信號(hào)至驅(qū)動(dòng)芯片;主芯片和電源芯片及驅(qū)動(dòng)芯片進(jìn)行實(shí)時(shí)SPI通訊;主芯片采集驅(qū)動(dòng)回路信號(hào),用于電機(jī)控制和診斷功能;外部設(shè)計(jì)無(wú)源晶振為ECU提供穩(wěn)定工作時(shí)鐘。
4.4.2 電源管理芯片
電源管理芯片(Power Management Integrated Unit,PMU)選用英飛凌TLF系列,滿足功能安全需求;串行升壓和降壓預(yù)調(diào)節(jié)器電壓范圍3.0~40.0 V,具有全性能和較低功耗損失;低壓后調(diào)節(jié)器5.0 V∕200 mA用于通信電源,5.0 V∕600 mA或3.3 V∕600 mA用于充放電電源;外部可選低壓后調(diào)節(jié)器提供啟用、同步輸出信號(hào)和電壓監(jiān)控;ADC電源的參考電壓為5.0 V±1%,兼容150 mA電流;2個(gè)跟蹤器按照參考電壓為傳感器供電,兼容150 mA電流。
4.4.3 預(yù)驅(qū)芯片
預(yù)驅(qū)芯片(Pre-Driver)選用英飛凌TLE 系列,滿足功能安全需求,可外部使能進(jìn)入安全狀態(tài);具備SPI 數(shù)據(jù)和地址接口,具備循環(huán)冗余校驗(yàn)(Cyclic Redundancy Check,CRC)功能;具備功能獨(dú)立的電流檢測(cè)放大器。
4.4.4 其他
除上述關(guān)鍵核心器件外,還有外部供電、CAN、SPI通訊、內(nèi)外部信號(hào)采集、電機(jī)轉(zhuǎn)子位置檢測(cè)等電路,不再贅述。
4.5 控制策略狀態(tài)機(jī)設(shè)計(jì)
為滿足功能安全的需求,除在硬件設(shè)計(jì)上實(shí)現(xiàn)冗余外,在控制策略方面也需重點(diǎn)考慮。
如圖7所示,線控轉(zhuǎn)向系統(tǒng)設(shè)計(jì)了初始態(tài)、禁止態(tài)、激活態(tài)以及故障態(tài),并且規(guī)定了每個(gè)狀態(tài)的工作內(nèi)容,具體描述如表8所示。
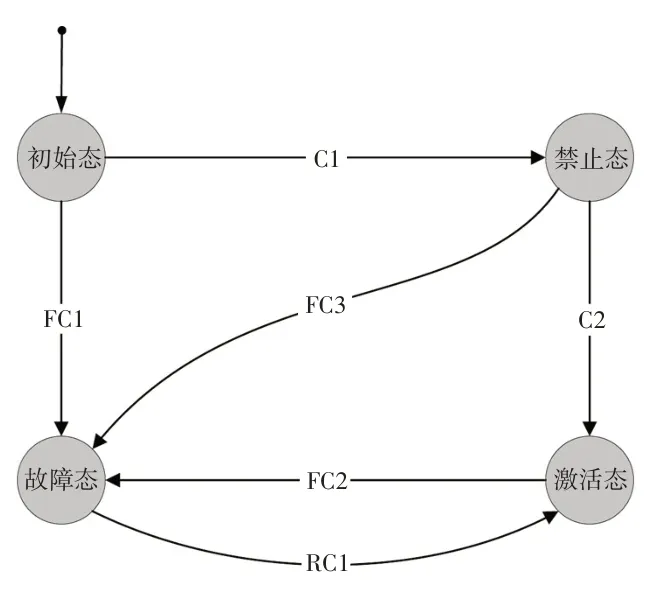
圖7 控制策略狀態(tài)機(jī)
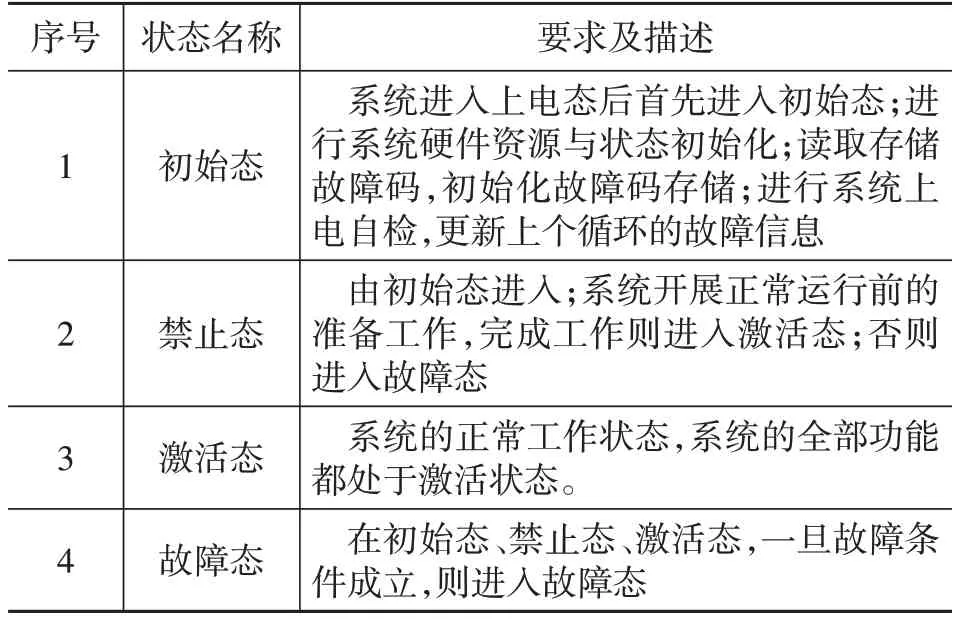
表8 SBW狀態(tài)機(jī)功能描述
狀態(tài)機(jī)能夠體現(xiàn)SBW系統(tǒng)的工作狀態(tài),對(duì)于功能安全的可能影響因子,可以通過(guò)在考慮狀態(tài)機(jī)條件時(shí)最大限度地完善系統(tǒng)狀態(tài)轉(zhuǎn)移過(guò)程,從而保證系統(tǒng)的功能安全。
5 臺(tái)架及實(shí)車(chē)測(cè)試驗(yàn)證
5.1 臺(tái)架故障注入測(cè)試驗(yàn)證
受條件限制,無(wú)法進(jìn)行自動(dòng)化測(cè)試,因此需對(duì)各部件進(jìn)行故障模擬,具有一定的風(fēng)險(xiǎn)性,故建立系統(tǒng)臺(tái)架用于測(cè)試驗(yàn)證。臺(tái)架測(cè)試環(huán)境如圖8所示。

圖8 臺(tái)架測(cè)試環(huán)境
對(duì)于路感模擬單元,綜合控制器控制路感模擬控制器的扭矩接口。設(shè)置工況為:期望電機(jī)力矩為幅值4.5 N·m、頻率0.1 Hz的正弦曲線,驗(yàn)證路感控制的跟隨性。
制造表6 所述的電源、點(diǎn)火、傳感器、CAN 通訊故障,路感模擬單元的扭矩響應(yīng)不變,如圖9所示。

圖9 路感模擬單元扭矩響應(yīng)曲線
對(duì)于轉(zhuǎn)向執(zhí)行單元,綜合控制器控制轉(zhuǎn)向執(zhí)行控制器的轉(zhuǎn)角接口。設(shè)置工況為:期望轉(zhuǎn)角為幅值45°、頻率0.5 Hz 的正弦曲線,驗(yàn)證轉(zhuǎn)向執(zhí)行器的跟隨性。
制造表6 所述的電源、點(diǎn)火、傳感器、CAN 通訊故障,轉(zhuǎn)向執(zhí)行單元的轉(zhuǎn)角響應(yīng)不變,如圖10所示。
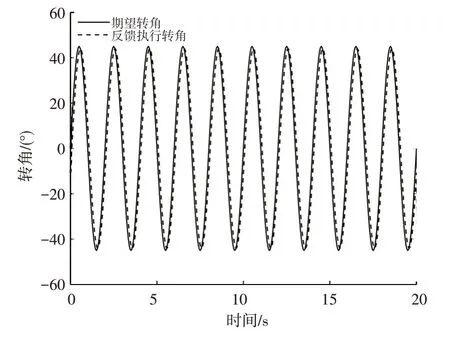
圖10 轉(zhuǎn)向執(zhí)行單元轉(zhuǎn)角響應(yīng)曲線
5.2 實(shí)車(chē)測(cè)試驗(yàn)證
分別以40 km∕h 和80 km∕h 車(chē)速進(jìn)行大側(cè)向加速度測(cè)試,使車(chē)輛側(cè)向加速度達(dá)到0.3g,驗(yàn)證線控轉(zhuǎn)向功能實(shí)現(xiàn)性,結(jié)果如圖11、圖12所示。

圖11 40 km∕h下轉(zhuǎn)向盤(pán)力矩與側(cè)向加速度的關(guān)系
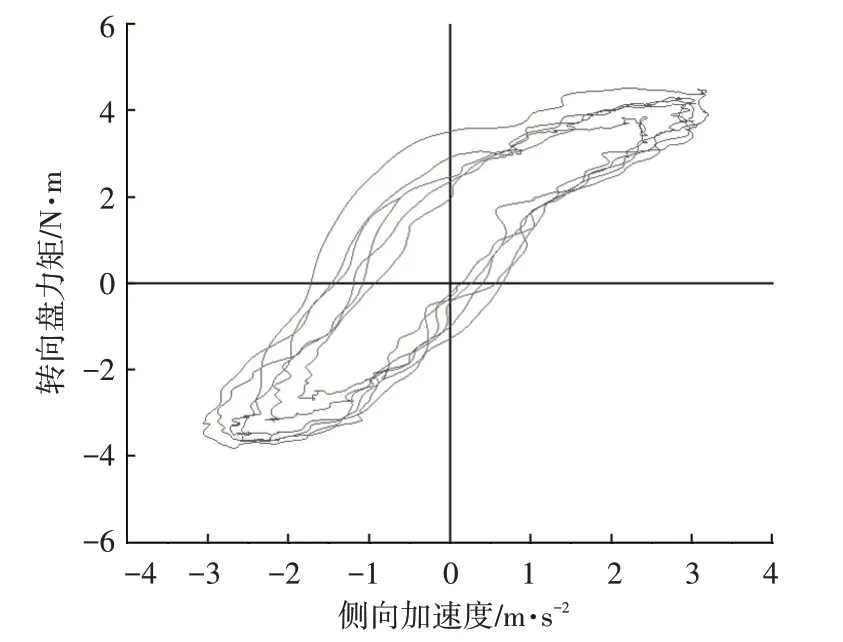
圖12 80 km∕h下轉(zhuǎn)向盤(pán)力矩與側(cè)向加速度的關(guān)系
從圖11 和圖12 中可以看出:在40 km∕h 車(chē)速下,轉(zhuǎn)向盤(pán)力矩與側(cè)向加速度較為對(duì)稱,線性度也較好,主觀感受良好;在80 km∕h車(chē)速下,轉(zhuǎn)向盤(pán)力矩與側(cè)向加速度關(guān)系曲線存在明顯不對(duì)稱現(xiàn)象,實(shí)際的主觀感受也與此相吻合,后續(xù)需要進(jìn)行調(diào)試;轉(zhuǎn)向盤(pán)力矩基本在4 N·m以內(nèi)飽和,且中間區(qū)域轉(zhuǎn)向盤(pán)力矩梯度明顯,隨著側(cè)向加速度增加逐漸飽和。
試驗(yàn)結(jié)果表明,該系統(tǒng)實(shí)現(xiàn)了線控轉(zhuǎn)向的功能,經(jīng)調(diào)試與優(yōu)化達(dá)到了一定的主觀評(píng)價(jià)要求。
6 結(jié)束語(yǔ)
本文從線控轉(zhuǎn)向系統(tǒng)的功能安全角度完成了安全目標(biāo)的初步設(shè)定,并進(jìn)行了系統(tǒng)架構(gòu)的設(shè)計(jì)、硬件方案及原理設(shè)計(jì)、控制策略狀態(tài)機(jī)設(shè)計(jì)以及臺(tái)架和實(shí)車(chē)的測(cè)試。測(cè)試結(jié)果表明,路感模擬單元和轉(zhuǎn)向執(zhí)行單元在故障注入的條件下可以實(shí)現(xiàn)相應(yīng)的跟隨性,驗(yàn)證了基于功能安全要求的方案設(shè)計(jì)的合理性,同時(shí),整車(chē)實(shí)現(xiàn)了線控轉(zhuǎn)向功能,技術(shù)方案滿足設(shè)計(jì)需求。但是力矩不對(duì)稱現(xiàn)象需要繼續(xù)通過(guò)調(diào)試相關(guān)參數(shù)進(jìn)行完善,以達(dá)到更加良好的效果。
猜你喜歡
中華詩(shī)詞(2022年6期)2022-12-31 06:41:24
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
中國(guó)科技論壇(2017年7期)2017-07-25 08:49:53
Coco薇(2017年5期)2017-06-05 08:53:16
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:32:55

- 汽車(chē)技術(shù)的其它文章
- 基于RGB-D SLAM的智能車(chē)自主避障與路徑規(guī)劃試驗(yàn)研究*
- 基于深度學(xué)習(xí)與圓檢測(cè)的實(shí)時(shí)雙目測(cè)距算法研究*
- 基于卷積神經(jīng)網(wǎng)絡(luò)的車(chē)輛位姿估計(jì)算法
- 基于25%小偏置碰撞的車(chē)身結(jié)構(gòu)研究
- 氫燃料電池發(fā)動(dòng)機(jī)耐久試驗(yàn)方法研究*
- A Motion Planning Method Based on Reinforcement Learning for Automatic Parallel Parking in Small Slot