一種三維激光掃描系統(tǒng)及點(diǎn)云標(biāo)定方法
2021-09-27 08:57:16黃陸君
電子世界 2021年15期
黃陸君 虞 靜 涂 樸
(1.四川文理學(xué)院智能制造學(xué)院;2.達(dá)州智能制造產(chǎn)業(yè)技術(shù)研究院)
激光掃描是一種對(duì)于空間進(jìn)行掃描測(cè)量技術(shù),通過(guò)主動(dòng)發(fā)射脈沖激光信號(hào)并進(jìn)行飛行時(shí)間測(cè)量和出射角度測(cè)量,可實(shí)現(xiàn)快速的空間斷面測(cè)量錯(cuò)誤。在工業(yè)檢測(cè)應(yīng)用中,斷面掃描成像缺乏三維空間信息,無(wú)法滿(mǎn)足三維空間測(cè)量需求,需要進(jìn)行二次集成以實(shí)現(xiàn)三維空間掃描。
為實(shí)現(xiàn)基于二維激光掃描儀的三維空間掃描點(diǎn)云數(shù)據(jù)標(biāo)定,本文從系統(tǒng)三維成像原理出發(fā)設(shè)計(jì)了系統(tǒng)點(diǎn)云標(biāo)定方法,通過(guò)對(duì)安裝誤差參數(shù)的補(bǔ)償實(shí)現(xiàn)了高精度點(diǎn)云數(shù)據(jù)的獲取,經(jīng)標(biāo)定后的點(diǎn)云數(shù)據(jù)精度達(dá)到±1cm,能夠滿(mǎn)足常見(jiàn)的三維空間掃描應(yīng)用需求。
1 激光三維掃描系統(tǒng)
為實(shí)現(xiàn)三維空間掃描成像,采用電控轉(zhuǎn)臺(tái)攜帶單線激光掃描儀連續(xù)旋轉(zhuǎn)的方式實(shí)現(xiàn)空間三維掃描,掃描視場(chǎng)角180°使得整個(gè)系統(tǒng)可實(shí)現(xiàn)180°×360°空間三維掃描,系統(tǒng)結(jié)構(gòu)及分布如圖1所示。
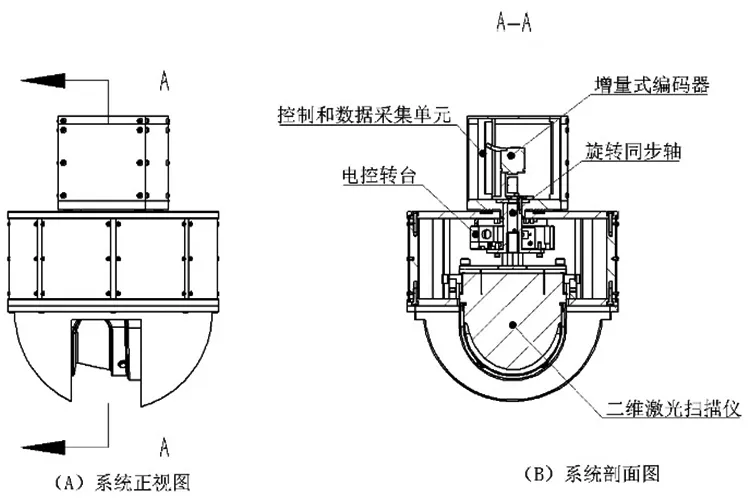
圖1 系統(tǒng)結(jié)構(gòu)
二維激光掃描儀采用SICK LMS511產(chǎn)品,可實(shí)現(xiàn)180°視場(chǎng)角斷面掃描,掃描速度可達(dá)到100線/s,測(cè)距精度可達(dá)到±8mm,最大測(cè)距80m。電控轉(zhuǎn)臺(tái)以步進(jìn)電機(jī)作為動(dòng)力,最大旋轉(zhuǎn)速度40°/s,設(shè)計(jì)系統(tǒng)旋轉(zhuǎn)速度20°/s,單圈掃描時(shí)間18s。二維激光掃描儀通過(guò)旋轉(zhuǎn)同步軸和增量式編碼器連接,增量式編碼器分辨率3600PPR,通過(guò)角度測(cè)量單元的4倍頻后可達(dá)到14400PPR,測(cè)角精度0.025°。控制和數(shù)據(jù)采集單元置于設(shè)備固定端,采用ARM+FPGA組合實(shí)現(xiàn)系統(tǒng)控制、數(shù)據(jù)采集和數(shù)據(jù)處理,掃描儀通過(guò)導(dǎo)電滑環(huán)與控制和數(shù)據(jù)采集單元連接。
控制和數(shù)據(jù)采集單元包括ARM和FPGA兩種控制器,ARM嵌入式系統(tǒng)采用Linux操作系統(tǒng)作為運(yùn)行平臺(tái),以數(shù)據(jù)處理、數(shù)據(jù)交互和系統(tǒng)總控為主要功能。ARM嵌入式采用瑞士Toradex AG公司Apalis-TK1核心板作為主控單元,TK1具有4核ARM Cortex-A15處理單元,運(yùn)行主頻高達(dá)2.2GHz,支持CUDA 6.5;FPGA單元用于底層控制和數(shù)據(jù)采集,包括步進(jìn)電機(jī)的細(xì)分控制、增量式編碼器角度測(cè)量、系統(tǒng)電源管理等功能。FPGA單元設(shè)計(jì)了與ARM單元的數(shù)據(jù)交互接口,采用標(biāo)準(zhǔn)的串口通信協(xié)議,實(shí)現(xiàn)指令和數(shù)據(jù)的交互。
2 點(diǎn)云標(biāo)校方法
2.1 三維點(diǎn)云解算
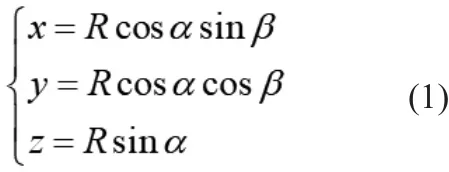
二維激光掃描儀采用極坐標(biāo)表示掃描數(shù)據(jù),設(shè)當(dāng)前測(cè)距R且掃描角度α,設(shè)電控轉(zhuǎn)臺(tái)當(dāng)前旋轉(zhuǎn)角度β,則當(dāng)前測(cè)點(diǎn)的三維坐標(biāo)計(jì)算為:
二維激光掃描儀數(shù)據(jù)幀支持編碼器脈沖直接輸入,掃描儀自動(dòng)記錄當(dāng)前脈沖數(shù)量,即一幀掃描數(shù)據(jù)對(duì)應(yīng)同一個(gè)旋轉(zhuǎn)角度。為進(jìn)一步提升測(cè)角精度,需對(duì)激光掃描儀所記錄的旋轉(zhuǎn)角度進(jìn)行插值運(yùn)算,設(shè)一幀掃描點(diǎn)數(shù)量N且旋轉(zhuǎn)角度為βi,則第n個(gè)掃描測(cè)點(diǎn)對(duì)應(yīng)的旋轉(zhuǎn)角度計(jì)算為:

其中βi,i+1,n為第i幀數(shù)據(jù)的第n個(gè)點(diǎn)所對(duì)應(yīng)的轉(zhuǎn)臺(tái)旋轉(zhuǎn)角度,注意掃描儀掃描角度為180°,但掃描光機(jī)為連續(xù)旋轉(zhuǎn)的360°掃描,故式(2)角度增量中步進(jìn)量為:

2.2 點(diǎn)云標(biāo)定方法
系統(tǒng)坐標(biāo)定義為掃描儀坐標(biāo)和三維空間坐標(biāo)的XZ軸完全重合的理想條件,實(shí)際的安裝和機(jī)械加工會(huì)存在一定的誤差,導(dǎo)致掃描儀坐標(biāo)軸并不與定義的坐標(biāo)軸重合。采用參數(shù)描述掃描儀坐標(biāo)系和全局坐標(biāo)系原點(diǎn)在XY軸向上的偏差及掃描儀安裝的橫滾和俯仰角度,則對(duì)掃描儀安裝誤差的標(biāo)定計(jì)算為:

式中Rφ和Rγ分別為橫滾和俯仰所對(duì)應(yīng)的旋轉(zhuǎn)矩陣,T為XY軸坐標(biāo)的平移矩陣。
3 實(shí)驗(yàn)與分析
實(shí)驗(yàn)采用自制三維掃描系統(tǒng),二維激光掃描儀、嵌入式控制系統(tǒng)和電控轉(zhuǎn)臺(tái)經(jīng)系統(tǒng)集成后,由1路網(wǎng)絡(luò)通信接口實(shí)現(xiàn)與外部通信和數(shù)據(jù)交互,掃描速度20°/s。系統(tǒng)安裝誤差導(dǎo)致三維掃描系統(tǒng)360°掃描后的點(diǎn)云存在錯(cuò)位,三維掃描點(diǎn)云精度不高。采用式(4)所述的方法對(duì)系統(tǒng)點(diǎn)云進(jìn)行標(biāo)定,經(jīng)反復(fù)調(diào)整最終確定的系統(tǒng)標(biāo)定參數(shù)為(-0.004,-0.046,0.1,0.4),經(jīng)標(biāo)定后的三維掃描系統(tǒng)所獲取的點(diǎn)云細(xì)節(jié)更加明顯,房間結(jié)構(gòu)更加清晰,360°掃描所獲取的點(diǎn)云錯(cuò)位消失,消除了系統(tǒng)安裝誤差對(duì)點(diǎn)云精度的影響,經(jīng)標(biāo)定后的平整墻面點(diǎn)云厚度小于2cm,點(diǎn)云精度達(dá)到了設(shè)計(jì)要求。如圖2所示。
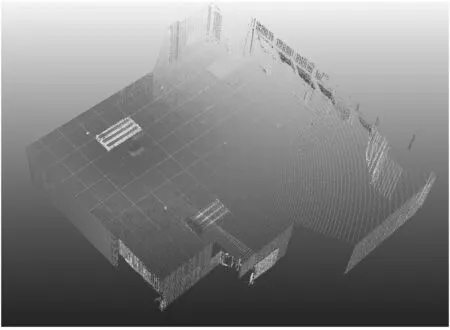
圖2 標(biāo)校后的點(diǎn)云
結(jié)語(yǔ):為實(shí)現(xiàn)基于二維激光掃描儀的三維空間成像測(cè)量,設(shè)計(jì)了基于旋轉(zhuǎn)的激光三維掃描系統(tǒng),通過(guò)FPGA控制電控轉(zhuǎn)臺(tái)進(jìn)行連續(xù)旋轉(zhuǎn)掃描實(shí)現(xiàn)了空間三維測(cè)量,獲取了三維掃描點(diǎn)云數(shù)據(jù);提出了消除系統(tǒng)安裝誤差的點(diǎn)云標(biāo)定方法,對(duì)掃描儀安裝誤差進(jìn)行了補(bǔ)償,提升了三維點(diǎn)云精度。通過(guò)室內(nèi)場(chǎng)景的三維掃描和數(shù)據(jù)標(biāo)定實(shí)驗(yàn),驗(yàn)證了三維掃描系統(tǒng)功能和點(diǎn)云標(biāo)定方法的有效性,實(shí)驗(yàn)結(jié)果表明,經(jīng)標(biāo)定后的三維掃描系統(tǒng)點(diǎn)云精度可達(dá)到±1cm,系統(tǒng)重復(fù)精度可以達(dá)到±1.5cm,系統(tǒng)功能和點(diǎn)云數(shù)據(jù)精度達(dá)到了設(shè)計(jì)預(yù)期要求。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
