基于MK60單片機(jī)的坡道循跡電動(dòng)小車設(shè)計(jì)--2020電子設(shè)計(jì)競(jìng)賽C題試析
2021-09-26 16:49:04余搏立
電腦知識(shí)與技術(shù) 2021年20期
余搏立


摘要:基于2020年大學(xué)生電子設(shè)計(jì)競(jìng)賽中C題“坡道行駛電動(dòng)小車”的任務(wù)要求,采用NXP MK60FX512VLQ15單片機(jī)作為主控芯片,研制搭載了直流四輪驅(qū)動(dòng)坡道行駛電動(dòng)小車,設(shè)計(jì)循跡檢測(cè)、速度調(diào)節(jié)、聲音提示、運(yùn)行參數(shù)顯示和電源等功能模塊。采用4路紅外線發(fā)射與接收管檢測(cè)電路實(shí)現(xiàn)路線循跡,以IRLR7843構(gòu)建光耦隔離全橋電路實(shí)現(xiàn)電機(jī)驅(qū)動(dòng),設(shè)計(jì)基于增量PID的轉(zhuǎn)速-電流雙閉環(huán)控制算法有效實(shí)現(xiàn)電動(dòng)小車坡道運(yùn)行的調(diào)速需求。經(jīng)測(cè)試,電動(dòng)小車能夠按照設(shè)定行駛時(shí)間應(yīng)對(duì)不同坡度角的路線騎行任務(wù),系統(tǒng)調(diào)節(jié)過(guò)程短,小車運(yùn)行平穩(wěn),誤差在可控范圍內(nèi),具有良好的人機(jī)交互功能,作品獲得本次競(jìng)賽安徽省TI杯。
關(guān)鍵詞:MK60;循跡;全橋電路;雙閉環(huán)控制
中文分類號(hào):TP27? ? 文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1009-3044(2021)20-0162-03
本文的研究背景來(lái)源于2020年全國(guó)TI杯大學(xué)生電子設(shè)計(jì)競(jìng)賽C題“坡道行駛電動(dòng)小車”。該競(jìng)事主辦方為教育部,經(jīng)過(guò)多年發(fā)展,已是全國(guó)本科、高職院校電子信息類專業(yè)學(xué)生廣泛參與的典型學(xué)科技能競(jìng)賽,以電子產(chǎn)品設(shè)計(jì)解決實(shí)際問(wèn)題為出題要點(diǎn);同時(shí)指導(dǎo)教師能夠借助競(jìng)賽成果組織開展專業(yè)與課程建設(shè)改革,促進(jìn)人才培養(yǎng)質(zhì)量提升[1]。目前,大學(xué)生電動(dòng)小車類作品的設(shè)計(jì)方法和理論較為成熟,本賽題的難點(diǎn)在于小車應(yīng)對(duì)不同坡度角的驅(qū)動(dòng)控制和84小時(shí)內(nèi)實(shí)現(xiàn)小車整體設(shè)計(jì)、制作與調(diào)試[2]。采用模塊化設(shè)計(jì)理念,以NXP MK60FX512VLQ15單片機(jī)作為核心控制器,本文設(shè)計(jì)一種多角度坡道循跡電動(dòng)小車,設(shè)計(jì)方案基于滿足賽題的具體要求,以期為同類大學(xué)生電子設(shè)計(jì)作品提供方案設(shè)計(jì)、硬件電路設(shè)計(jì)和軟件設(shè)計(jì)等方面的具體經(jīng)驗(yàn)借鑒。
1 方案設(shè)計(jì)
1.1技術(shù)指標(biāo)
經(jīng)過(guò)賽題研讀、技術(shù)指標(biāo)設(shè)計(jì)、可行性需求分析、功能模塊驗(yàn)證、技術(shù)指標(biāo)確定五個(gè)環(huán)節(jié),設(shè)計(jì)出電動(dòng)小車技術(shù)指標(biāo)一覽表,如下表1所示。將技術(shù)指標(biāo)作為進(jìn)行實(shí)驗(yàn)平臺(tái)設(shè)計(jì)的標(biāo)準(zhǔn),可以有效避免出現(xiàn)返工等延誤設(shè)計(jì)進(jìn)度的失誤情況。
1.2 系統(tǒng)方案
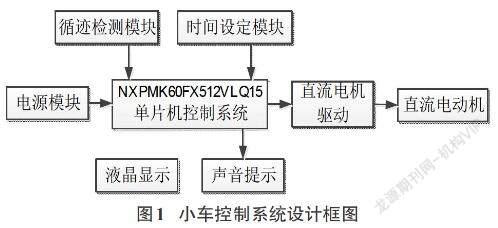
本設(shè)計(jì)按照如圖1所示的系統(tǒng)設(shè)計(jì)框圖搭建功能模塊。該小車控制系統(tǒng)主要由MCU主控制器、傳感器循跡檢測(cè)、運(yùn)行時(shí)間設(shè)定、電機(jī)驅(qū)動(dòng)、液晶顯示、聲音提示和供電電源等部分組成,通過(guò)螺釘固定在2.55mm厚度黑色玻纖板制作的小車底盤上。選擇NXP MK60FX512VLQ15單片機(jī)作為小車的控制核心;采用紅外線對(duì)管傳感器識(shí)別黑白方格路線,經(jīng)單片機(jī)程序設(shè)計(jì),實(shí)現(xiàn)電動(dòng)小車能夠按照預(yù)設(shè)的工作模式完成多角度坡道行走的控制功能。結(jié)合賽題任務(wù)要求,電動(dòng)小車的運(yùn)行速度以時(shí)間為單位進(jìn)行設(shè)定,通過(guò)OLED顯示設(shè)定時(shí)間與實(shí)際行駛時(shí)間,小車停止行駛后,發(fā)出聲音提示。
2 硬件設(shè)計(jì)
2.1循跡檢測(cè)模塊
循跡檢測(cè)模塊用于識(shí)別小車的行駛路徑,而行駛路徑由黑白間隔的紙質(zhì)標(biāo)記線構(gòu)成,因此循跡檢測(cè)實(shí)質(zhì)就是黑白兩種顏色及木工板背景色的實(shí)時(shí)檢測(cè)。從傳感器易于獲取、便于車體安裝、工作狀態(tài)穩(wěn)定以及外圍電路簡(jiǎn)單等方面綜合考慮,選用紅外線發(fā)射與接收管進(jìn)行循跡檢測(cè)[3]。裝載在車體上的四路紅外對(duì)管發(fā)射端通電后持續(xù)發(fā)出紅外光線,依據(jù)紅外光線的反射特性,若騎行線路上出現(xiàn)黑色標(biāo)記則紅外對(duì)管的接收端無(wú)返回信號(hào),反之對(duì)于騎行路線上的白色標(biāo)記能夠反射接收紅外光線,以此識(shí)別黑線位置。如圖8所示,循跡檢測(cè)模塊識(shí)別出白色標(biāo)記時(shí),用于狀態(tài)顯示的開關(guān)指示燈點(diǎn)亮,且單片機(jī)接收到低電平信號(hào),檢測(cè)距離2~30cm,檢測(cè)角度35°,采用5V供電。
2.2電機(jī)與驅(qū)動(dòng)電路
為保障小車的動(dòng)力性和通過(guò)性設(shè)計(jì)時(shí)采用四輪電機(jī)驅(qū)動(dòng),同時(shí)結(jié)合車體的尺寸設(shè)計(jì),選用RS380馬達(dá),其最大功率20W,空載轉(zhuǎn)速15000rpm。使用IR2104S和IR LR7843搭建光耦隔離H型全橋驅(qū)動(dòng)電路,通過(guò)專用PWM通道輸出電機(jī)兩端直流電壓實(shí)現(xiàn)小車頻繁的快速啟動(dòng)、制動(dòng)和差速轉(zhuǎn)向的速度控制[4],控制邏輯來(lái)源于循跡檢測(cè)模塊對(duì)騎行路線的識(shí)別結(jié)果。
3 軟件設(shè)計(jì)
3.1 增量式PID控制
由于車體設(shè)計(jì)結(jié)構(gòu)參數(shù)和環(huán)境參數(shù)具有一定的不確定性,在競(jìng)賽較短的時(shí)間內(nèi)構(gòu)建精準(zhǔn)的數(shù)學(xué)模型很難實(shí)現(xiàn),因此模糊控制、神經(jīng)網(wǎng)絡(luò)控制等算法的實(shí)現(xiàn)不符合實(shí)際。在電力拖動(dòng)控制系統(tǒng)中傳統(tǒng)PID算法具備易于實(shí)現(xiàn)、系統(tǒng)穩(wěn)定、參數(shù)調(diào)試步驟簡(jiǎn)單等優(yōu)勢(shì),而增量式PID誤動(dòng)作時(shí)影響小,適用于坡道小車動(dòng)態(tài)調(diào)節(jié),構(gòu)建閉環(huán)反饋調(diào)節(jié)器,其輸出是控制量的增量[5]:
[?uk=uk-uk-1=Kp?ek+Kiek+Kd[?ek-?e(k-1)]]
3.2 轉(zhuǎn)速電流雙閉環(huán)調(diào)速系統(tǒng)
經(jīng)多次試驗(yàn)驗(yàn)證發(fā)現(xiàn),坡道小車在起動(dòng)時(shí)易出現(xiàn)打滑現(xiàn)象。相比較單閉環(huán)調(diào)速系統(tǒng),轉(zhuǎn)速電流雙閉環(huán)直流調(diào)速起動(dòng)過(guò)程恒流升速,能夠充分發(fā)揮電機(jī)的過(guò)載能力,縮短起動(dòng)過(guò)程,提供較高轉(zhuǎn)矩。如圖3所示,因此必須進(jìn)行驅(qū)動(dòng)電機(jī)的實(shí)際轉(zhuǎn)速檢測(cè)和母線電流檢測(cè),設(shè)置不同采樣頻率,檢測(cè)值代入系統(tǒng)參與反饋調(diào)節(jié)控制,以速度外環(huán)控制為主[6]。
3.3程序設(shè)計(jì)流程圖
單片機(jī)軟件設(shè)計(jì)流程如圖4所示,由主程序和中斷程序組成,其中主程序中主要實(shí)現(xiàn)能夠通過(guò)電位器設(shè)定電動(dòng)小車運(yùn)行時(shí)間,理論上時(shí)間設(shè)定范圍10~20s線性對(duì)應(yīng)電位器電壓。中斷程序中進(jìn)行騎行路線標(biāo)記識(shí)別和轉(zhuǎn)速電流雙閉環(huán)直流電機(jī)調(diào)速,為實(shí)現(xiàn)控制電動(dòng)小車能夠適應(yīng)不同坡道運(yùn)行和運(yùn)行時(shí)間設(shè)定,采用差速控制實(shí)現(xiàn)電動(dòng)小車彎道行走,PWM占空比通過(guò)外部電位器調(diào)節(jié),轉(zhuǎn)速閉環(huán)提高電動(dòng)小車動(dòng)態(tài)響應(yīng),電流閉環(huán)有效控制電機(jī)爬坡轉(zhuǎn)矩。
4 測(cè)試方案及測(cè)試數(shù)據(jù)
4.1測(cè)試設(shè)備及方式
基于易于獲取和測(cè)量精度要求,選用如下測(cè)試設(shè)備:手機(jī)、直尺、電子天平、秒表、萬(wàn)用表、示波器等。測(cè)試方法描述如下:
