基于物聯網和大數據的城市道路智慧停車系統研究
2021-09-26 16:25:16練云翔,王明瑞,張俊華
電腦知識與技術 2021年20期
練云翔,王明瑞,張俊華

摘要:針對城市道路中的車位尋找困難、停車難的問題,設計了一種基于物聯網和大數據的城市道路智慧停車系統。采用STM32處理器設計了車輛感知終端,通過地磁技術感知車位的占用情況,利用圖像識別技術獲取車牌信息。自主設計了ZigBee無線傳感器網絡對車位車輛信息進行傳輸和收集。采用大數據分析技術,對數據進行統計分析、在線查詢和數據分析。采用MINA小程序框架設計了微信小程序,實現用戶對周邊空閑車位的顯示和查詢。
關鍵詞: 智慧停車系統;STM32;ZigBee;無線傳感器網絡;MINA小程序框架
中圖分類號:TP393? ? ? 文獻標識碼:A
文章編號:1009-3044(2021)20-0150-03
1 引言
隨著國內城市規模的不斷擴大,人們出行距離正在增長,城市機動車總量不斷增加。城市停車難、停車亂等問題成為城市交通治理的難題[1]。根據目前的城市交通現狀,我國近年來正在發展基于大型停車設施的智能停車系統,如地下停車場智能管理系統、露天停車場智能管理系統等。在大型停車設施周邊的區域中,停車難、停車亂問題得到了一定程度的解決。然而,在城市中有很多周邊沒有大型停車設施的區域,這些區域的車輛通常停在道路兩側的停車區,停車難、停車亂問題依然存在。
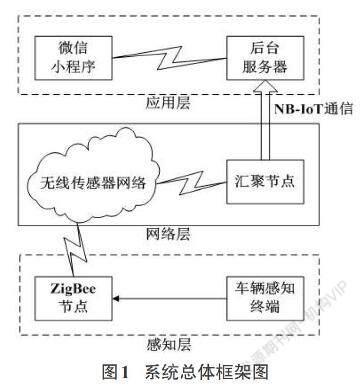
為了解決上述問題,本文提出了一種基于物聯網和大數據的城市道路智慧停車系統。此系統由感知層、網絡層和應用層三個部分組成。可以實現對道路兩旁車位信息的獲取,對已停車輛信息的識別,通過ZigBee無線傳感器網絡對車位信息和車輛信息實現收集和匯聚,最后對數據進行分析和處理,用戶通過手機微信小程序方式實時掌握路邊車位信息。
2 系統總體框架
基于物聯網和大數據的城市道路智慧停車系統由三個部分組成,分別是感知層、網絡層和應用層。感知層是以STM32為核心處理器的車輛感知終端,感知終端的感知方式通過地磁識別和圖像識別相結合來實現,地磁識別獲取道路兩旁車位上的車位占用狀態,圖像識別可用于車位上的車牌信息識別。網絡層是由ZigBee節點組成的無線傳感器網絡,ZigBee節點負責收集本車位區域的車位和車輛信息,通過ZigBee無線通信的方式將信息傳輸信息匯集節點。匯聚節點通過NB-IoT窄帶通信技術將數據發送給后臺服務器。應用層由兩部分組成,一部分是后臺服務器上運行的數據庫和大數據分析軟件,對無線傳感器網絡收集的數據進行存儲和管理。另一部分是用戶手機上運行的微信小程序,用戶通過微信小程序查詢周邊車位狀況信息。
3 感知層
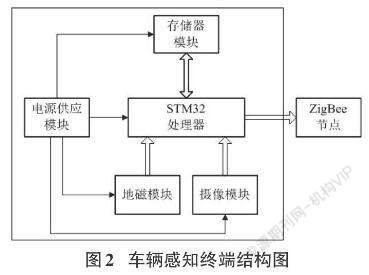
感知層由車輛感知終端和ZigBee節點構成。車輛感知終端包含了STM32處理器、地磁模塊、攝像模塊、存儲器模塊、電源供應模塊等部件。其中,車輛感知終端主要以STM32F103VET6芯片作為處理器;地磁模塊負責感知道路車位的占用情況;攝像模塊負責拍攝車牌圖像,再由STM32處理器的圖像識別程序識別車位上車輛的車牌號碼;存儲器用來存儲車位占用狀態和車輛車牌信息;電源供應模塊對車輛感知終端的電子部件的電源供應。
3.1 地磁模塊程序設計
地磁模塊采用環形線圈檢測技術對車位占用狀態進行檢測。地磁模塊的感應環形線圈安裝在道路兩旁的車位地面下方。當有車輛發生位移時,會對感應線圈產生的電磁場造成干擾,使電感量發生變化。地磁模塊程序通過對電感量的實時檢測,來實現車位占用狀態的感知[2]。
地磁模塊的車位占用狀態感知過程:首先獲得當前的電磁量值,接著將當前的電磁量值與上次獲得的電磁量進行比較,如果不同則說明有車輛正在車位上發生位移。將當前的電磁量保存在存儲器中,以便下一次的比對。接著等待車輛停止穩定,再對當前電磁量與車位空置時的電磁量進行比較,如果不同則表示有車輛停在了車位上,最后控制攝像模塊進行圖像捕捉,通過圖像識別來識別車牌號碼。
3.2車牌圖像識別
根據文獻[3],首先對車牌圖像進行預處理。采用微分法,利用梯度算子,處理車牌圖像銳化。采用計算量小、對細節反應敏感的Roberts邊緣檢測算子,可以得到較細邊緣。用如下卷積模板表示:
然后對車牌圖像進行矯正。由于攝像設備的拍攝角度問題,車牌圖像容易出現傾斜,會對車牌圖像識別的精確性造成影響。為了解決這個問題,采用Radon積分變換計算車牌的傾斜角度,從斷層掃描的剖面圖重建出投影前的函數,以獲得高質量的車牌圖像,沿θ方向的Radon變換定義如下:
4 網絡層
網絡層通過ZigBee無線傳感器網絡對感知層感知的信息進行傳輸和收集。
根據文獻[4],針對固定部署的ZigBee節點,采用一種特定的無線傳感器網絡路由規劃。無線傳感器網絡覆蓋道路的車位區域,區域內的車輛感知終端通過ZigBee節點將本車位中占用信息和車牌號碼信息傳輸到無線傳感器網絡中,再采用特定的路由路徑,使用多跳的方式,最終傳輸到匯聚節點中。匯聚節點收集所有節點數據后,通過NB-IoT窄帶通信技術將數據發送給后臺服務器。
5 應用層
應用層由后臺服務器和微信小程序組成。后臺服務器利用數據庫技術對采集的數據進行存儲和管理,采用大數據技術對車輛附近的車位占用狀態進行關聯搜查,尋找合適的空閑車位。微信小程序包括了微信服務器和小程序客戶端,微信服務器為用戶手機端的小程序客戶端提供支持和服務,小程序客戶端運行在用戶手機中,負責獲取用戶位置,并將后臺服務器查詢到的空閑車位信息顯示在小程序界面中[5]。
5.1大數據分析
Hadoop是分布式系統的重要技術,通過分層原理實現數據信息的高效處理,Hadoop具有穩定性強、容錯性高和成本性低等優點[6]。在無線傳感器網絡中,通過車輛感知終端采集了大量數據,包括車位位置、車位占用情況、車位占用持續時間、車位占用開始時間、車牌號碼等。在后臺服務器中使用數據庫對這些信息進行存儲和管理,后臺服務器的大數據分析軟件利用Hadoop技術對數據進行統計分析、在線查詢和數據分析。在大數據技術的信息采集功能下,對車輛附近的車位占用狀態進行關聯搜查,尋找合適的空閑車位,并將車輛附近的車位信息通過微信小程序顯示在用戶手機界面上。
