基于圖像的空中加油軟管平衡拖曳位置測量方法
2021-09-23 08:53:28張建花馬曉東
應用光學
2021年4期
關鍵詞:測量
張建花,陳 貝,馬曉東
(中國飛行試驗研究院 測試所,陜西 西安 710089)
引言
“插頭-錐管”式空中加油系統是目前眾多國家采用的一種空中加油方式。加油錐套對大氣紊流較敏感,當受油機和加油機逼近時,兩機流場相互影響,加油錐套擺動幅度增大,加油對接困難。因此,計算空中加油軟管的平衡拖曳位置是研究“插頭-錐管”式加油軟管錐套組件動態運動的基礎和重要依據[1-3]。常規模式是建立加油機尾流場模型,從軟管受力分析出發,通過離散軟管質點分析計算空中加油軟管平衡拖曳位置[4]。本文設計了一套基于視覺圖像的空中加油軟管平衡拖曳位置測量方法,避免利用力學和流場分析加油軟管平衡拖曳位置的復雜建模和公式推導,解決了飛行條件下加油系統關鍵參數測試與性能評估的技術難題。
1 測量方案設計
1.1 系統構成
在加油機上加裝高清攝像機、高清視頻采集記錄器、電源變換器、GPS 時碼發生器,構成空中加油機載多路高清影像測量系統,該系統如圖1 所示。其中,電源變換器將飛機上的28 V 供電轉換為12 V,為高清攝像機供電;GPS 時碼發生器為系統提供精確到ms 的IRIG-B 時間信息;高清視頻采集記錄器控制高清像機的同步觸發和圖像采集記錄。
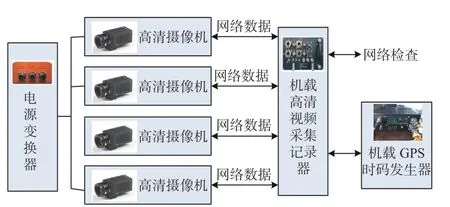
圖1 空中加油機載多路高清影像測量系統Fig.1 Airborne multichannel and high-definition image measurement system of aerial refueling
1.2 測量原理
利用空中加油機載多路高清影像測量系統獲取空中加油對接過程中加油軟管的高清影像。對兩路高清影像中的加油錐套識別和跟蹤,獲取同一時刻錐套中心在每一幀圖像中的像素坐標[5]。……
登錄APP查看全文
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00