履輪復合式電傳動車輛轉矩分配策略研究
2021-09-23 06:08:24宋平張凌云張杰
電子技術與軟件工程 2021年12期
宋平 張凌云 張杰
(陸軍裝甲兵學院 北京市 100072)
1 引言
當前,電傳動技術日臻成熟且在多個領域應用廣泛,以綜合電力系統、電驅動、電磁炮、電磁裝甲為主要特征的全電化裝甲車輛取得了重大的發展與突破。基于電傳動技術的履帶式裝甲車輛具有接地面積大、通過性強、中心轉向等優點[1]。然而,受限于電機設計與制造水平,車輛驅動電機功率密度不足,轉矩密度較低[2],同時由于履帶式車輛整體質量過大,難以保證車輛在起動、轉向、爬坡以及最高設計速度下行駛等方面的性能表現[3]。基于以上問題,本文突破傳統思維,開展創新研究,提出了一種履輪復合式電傳動系統方案。該方案結合了履帶式與輪式裝甲車輛各自的優點,通過在履帶式裝甲車輛的負重輪中加入輪轂驅動電機[4],極大地提高了驅動電機整體功率密度與轉矩輸出,并大幅提升車輛整體性能。
2 履輪復合式電傳動車輛方案設計
本文將8噸級履帶式裝甲車輛作為研究目標,根據戰術技術指標要求,開展履輪復合式電傳動履帶車輛總體方案設計。采用基于多領域分析、多層面集成的總體設計方法,進行履輪復合式電傳動系統的總體技術方案設計,整車方案原理框圖如圖1所示。系統方案是發動機通過增速器實現和發電機的有效連接,形成并釋放三相交流電,在進行整流等一系列處理后輸出高壓直流電。鋰離子動力電池經過雙向 變換器,以并聯的形式與超級電容掛接于直流母線上。高壓直流電經逆變器后,為各個驅動電機供電,驅動車輛行駛。主動輪電機在車輛行使過程中提供主驅動力,滿足車輛正常高速行駛時的功率和扭矩需求,同時將左、右側第2、3、4、5負重輪改裝為輪轂電機驅動輪,為車輛提供輔助驅動力,配合主動輪電機共同滿足車輛起動、轉向和爬坡時的大扭矩需求。
3 履輪復合式電傳動車輛車輛轉矩分配控制策略
履帶車輛通常行駛在復雜、惡劣路面,兩側傳動系統中各電機之間沒有機械約束,在車輛行駛過程中路面負載突變導致主動輪轉速難以跟蹤,因此必須對各個電機輸出驅動力必須進行有效的協調控制,才能滿足車輛直駛、轉向、爬坡等不同行駛工況要求,對于提高車輛的機動性以及操控性具有重要意義。本文按照分層設計的理念將車輛行駛控制策略分為運動層和分配層,其中運動層將整車行駛所需驅動力分配至兩側傳動系統,分配層主要處理單側傳動系統目標轉矩在內部1個主動輪電機和4個負重輪電機之間的分配問題,其中運動層控制策略參考文獻[5],本文主要考慮分配層控制策略。
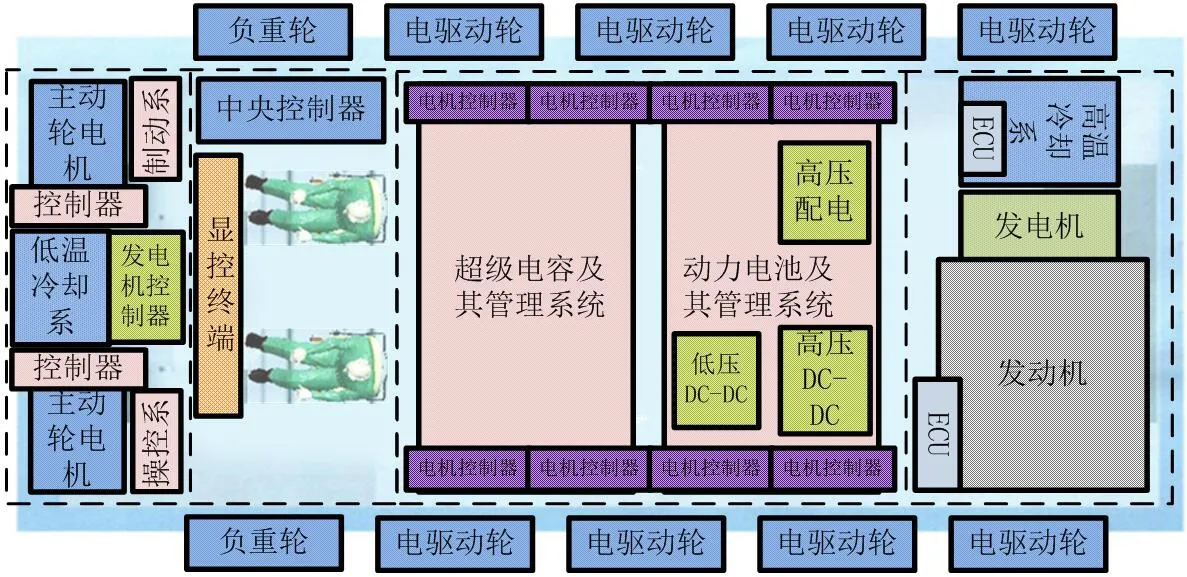
圖1:履輪復合式電傳動系統方案原理框圖
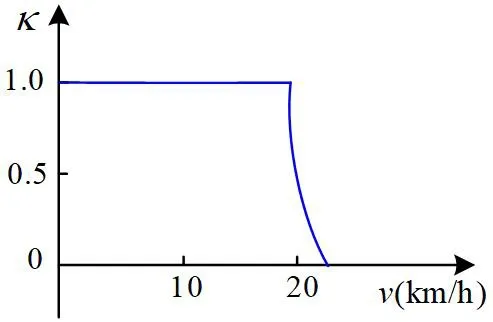
圖2:加權系數與車速關系曲線
在將行駛過程中車輛傳動系統總目標轉矩在兩側主動輪電機軸端進行分配后,分別得到兩側傳動系統目標轉矩Tl*和Tr*,在分配層需要進一步考慮如何將每一側傳動系統的目標轉矩在內部5個電機之間進行分配。根據傳動系統設計方案,主動輪電機的主要功能是為車輛正常運行提供穩定持續的驅動力,當車輛處于爬坡等低速大扭矩工況下,啟動負重輪電機并釋放輔助驅動力。同時主動輪電機選取了性能可靠且當前應用比較廣泛的永磁同步電機,負重輪電機選取了運行穩定的開關磁阻電機,在電機方案中,永磁同步電機具有比開關磁阻電機更高的運行效率,因此在分配層設計了基于“主動輪電機優先”的分配規則,即將單側傳動系統目標轉矩優先分配給主動輪電機,如果主動輪電機輸出轉矩不滿足單側目標轉矩需求,則將剩余部分轉矩在4個負重輪電機之間分配。以左側傳動系統目標轉矩的分配為例,其分配規則可以用式(1)表示:

式中Tzl為左側主動輪電機分配轉矩;ωzl為左側主動輪電機當前轉速;Tmax(ωzl)為左側主動輪在當前轉速下所能輸出的最大轉矩。
當Tl*>Tmax(ωzl),超出主動輪電機在當前轉速下所能輸出最大轉矩的部分TdΣ可以表示為:

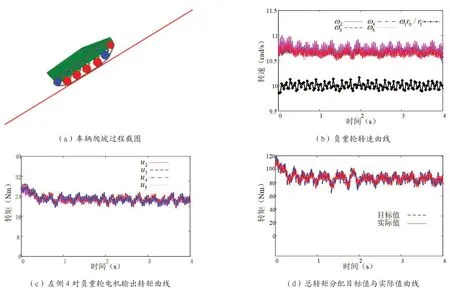
圖3:爬30度坡性能仿真曲線
然后考慮TdΣ在4個負重輪電機之間的分配問題,由于4個負重輪電機具有相同的特性和運行效率,在負重輪嚙合齒與履帶齒嚙合良好時,只有將TdΣ在4個負重輪電機之間平均分配時,負重輪傳動系統總的驅動效率達到最優。考慮到主動輪電機和負重輪電機協同驅動時,車輛的最大速度為20km/h。假設協同驅動時車輛的平均速度為10km/h,而履帶板的節距為0.122m,任何一個負重輪與履帶板接觸位置在1s內要嚙合約23次左右,因此在負重輪嚙合齒與履帶齒不處于良好的嚙合狀態時,隨著車輛的運動,負重輪能夠很快回到嚙合良好的狀態。所以TdΣ在4個負重輪電機之間分配時,認為所有的負重輪嚙合齒與履帶齒嚙合良好,每一個負重輪電機所分配的轉矩可以表示為:

式中Tdi代表左側第i臺負重輪電機所分配的轉矩,i=1:4。
在車輛高速(≥20km/h)行駛時,負重輪電機不參與轉矩的分配,當車速較低(<20km/h)時,負重輪電機開始介入參與轉矩的分配,與主動輪電機協同驅動車輛行駛。如果不對負重輪電機開始介入和退出時轉矩的分配加以調整,會造成車輛驅動力出現比較大的突變,不利于車輛的平穩行駛。因此為了實現負重輪電機輸出驅動力切換時的平滑過渡,在車速大于20km/h時施加加權系數K來動態調整兩側傳動系統的目標轉矩,那么有:

式中Tdi_f為左側第i臺負重輪電機最終所分配的轉矩;加權系數K滿足如圖2所示的關系。
4 控制策略仿真驗證
本文利用文獻[5]建立的樣車機電聯合仿真模型對控制策略進行仿真驗證,為了驗證控制策略在主動輪電機和負重輪電機協同驅動模式下的控制效果,論文選取典型的低速大扭矩爬坡工況對控制策略進行聯合仿真驗證。同時為了保證車輛單側電驅動系統總目標轉矩超過主動輪電機所能提供的最大轉矩,設置坡度為30度,縱向車速為10km/h,仿真結果如圖3所示。
由圖3(b)可知在勻速爬坡過程中,4個負重輪轉速并沒有出現滑轉,經過傳動比換算后基本與主動輪轉速基本相同。由圖3(c)和3(d)可知超過主動輪電機輸出轉矩的部分在4個負重輪電機之間分配均勻,輸出動力平穩,總的轉矩分配目標值與實際值保持一致,該結果驗證了行駛控制策略中基于規則分配的有效性。
5 結論
針對電傳動履帶車輛中驅動電機設計和制造難度較高,本文提出了一種主動輪和負重輪協同驅動車輛行駛的履輪復合式電傳動車輛方案。在整車行駛控制策略的分配層中設計了以“主動輪電機優先和負重輪電機平均分配”為規則的轉矩分配控制策略,基于機電聯合仿真模型對控制策略的有效性行了驗證,結果表明所設計的分配層控制策略能夠合理分配兩側多個電機輸出轉矩,為控制策略的實車應用奠定了基礎。
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:30:02
能源工程(2020年6期)2021-01-26 00:55:22
鐵道通信信號(2020年9期)2020-02-06 09:15:22
山東冶金(2019年3期)2019-07-10 00:54:04
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24