車載激光掃描技術(shù)在路況檢測(cè)中的應(yīng)用
2021-09-22 06:13:18張向陽鐘棉卿
電子技術(shù)與軟件工程 2021年15期
張向陽 鐘棉卿
(甘肅正昊測(cè)繪工程有限公司 甘肅省天水市 741000)
1 車載激光掃描技術(shù)
車載激光掃描系統(tǒng)隨車輛的運(yùn)動(dòng),通過多種傳感器收集周圍環(huán)境的信息。配置的激光掃描儀以每秒百萬次至千萬次的頻率向周圍表面實(shí)施動(dòng)態(tài)的距離測(cè)量,經(jīng)GNSS/IMU定位定姿系統(tǒng)的聯(lián)合解算與系統(tǒng)內(nèi)參數(shù)的坐標(biāo)轉(zhuǎn)換[1],獲得每激光束的空間指向,進(jìn)而得到沿路徑的密集三維點(diǎn)云條帶。
與地基三維激光掃描儀相比,車載激光掃描系統(tǒng)具有更遠(yuǎn)的探測(cè)距離,利用移動(dòng)的優(yōu)勢(shì),能高速測(cè)量道路沿線的信息。與機(jī)載雷達(dá)數(shù)據(jù)相比,車載激光數(shù)據(jù)距離路面更近,能得到高分辨率的路面影像和高精度、高密集的路面點(diǎn)云[2]。另外,車載的形式更加靈活,對(duì)采集數(shù)據(jù)的環(huán)境和天氣條件要求更低。與車載攝影測(cè)量系統(tǒng)相比,車載激光掃描護(hù)具有更高的精度。
目前,商用車載激光掃描系統(tǒng)的掃描范圍普遍超過百米。掃描速度,又稱為激光重復(fù)頻率或點(diǎn)頻,普遍都能達(dá)到百萬量級(jí),一些高端產(chǎn)品可達(dá)幾千點(diǎn)/秒,這對(duì)于生成精細(xì)的路面模型來說是足夠的,也是高效的。另外,車載掃描數(shù)據(jù)信息量豐富,同一數(shù)據(jù)集助攻含有多個(gè)類別的信息,數(shù)據(jù)的可利用率顯著提高,能激發(fā)其在多個(gè)行業(yè)的應(yīng)用潛能。
2 工程概況
工程位于長(zhǎng)深高速公路(北段),檢測(cè)對(duì)象為部分瀝青路面路段。路段基橫斷面為:0.75m(土路肩)+3.0m(硬路肩)+3×3.75m(車行道)+0.75m(路緣帶)+3.0m(中央分隔帶)+0.75m(路緣帶)+3×3.75m(車行道)+3.0m(硬路肩)+0.75m(土路肩),總寬度34.5m。路面檢測(cè)任務(wù)重,選取了9km長(zhǎng)的路段采用車載激光掃描系統(tǒng)進(jìn)行掃描,利用車載掃描數(shù)據(jù)檢測(cè)路況,提供路面破損、路面平整度、路面車轍深度等參數(shù),并與常規(guī)檢測(cè)手段結(jié)果做比較,以評(píng)價(jià)利用車載激光掃描技術(shù)開展路面檢測(cè)的技術(shù)適用性與精度。
本項(xiàng)目使用中國(guó)測(cè)繪科學(xué)研究院、北京四維遠(yuǎn)見信息技術(shù)有限公司、首都師范大學(xué)多家單位合作研發(fā)的SSW車載激光建模測(cè)量系統(tǒng)。本項(xiàng)目中系統(tǒng)的安裝高度為2.315m,設(shè)定的激光發(fā)射點(diǎn)頻500KHz,掃描線頻200Hz。在2.70m高度支架兩側(cè)分布搭載3臺(tái)(共6臺(tái))像元大小6μ,2400萬像素的相機(jī)對(duì)路面拍照,獲取連續(xù)的路面影像,經(jīng)匹配后生成真彩色路面點(diǎn)云。數(shù)據(jù)采集時(shí),以中央隔離帶為界,對(duì)兩側(cè)車道分別掃描。
3 利用車載點(diǎn)云數(shù)據(jù)評(píng)價(jià)路面狀況
3.1 路面破損
一般來說,路面破損包含多種類型,如龜裂、塊狀裂縫、縱裂、橫裂、坑槽、沉陷等。本路段的路面病害主要為橫向裂縫、縱向裂縫、龜裂、沉陷,并有部分修補(bǔ)。路面破損基于不同類型,設(shè)置了多種分級(jí)指標(biāo),使用規(guī)定的換算系數(shù)計(jì)算路面破損率DR,得到路面狀況指數(shù)PCI,由PCI得分情況將路面評(píng)定為優(yōu)、良、中、次、差等級(jí)。
本實(shí)例將激光點(diǎn)云與影像進(jìn)行精匹配,將將車載激光掃描系統(tǒng)的獲取的影像拼接為基于點(diǎn)云坐標(biāo)系統(tǒng)的整體路面的正射影像,利用坐標(biāo)與點(diǎn)云數(shù)據(jù)關(guān)系,在影像數(shù)據(jù)中識(shí)別與標(biāo)記路面損害類型,勾勒損害的邊界,計(jì)算損害法平面參數(shù),如塊度、縫寬、縫長(zhǎng)等。對(duì)于必須提供深度的損害類型,如沉陷、坑槽等,由對(duì)應(yīng)坐標(biāo)處的三維點(diǎn)云數(shù)據(jù)提供。路面破損率按車道統(tǒng)計(jì),表1列出了檢測(cè)結(jié)果。
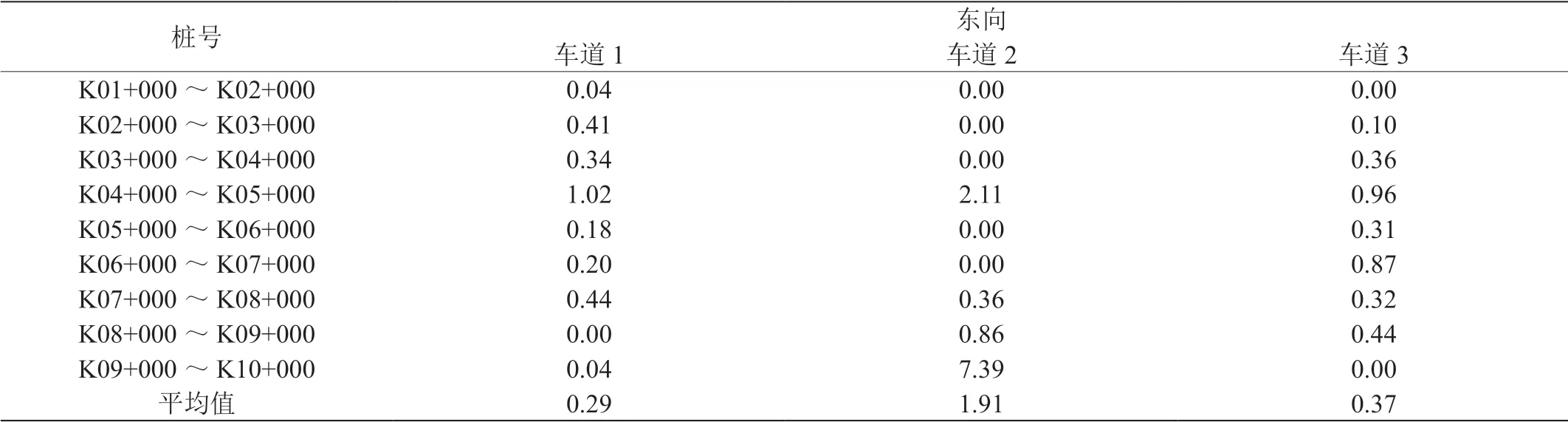
表1:路面破損率DR檢測(cè)結(jié)果(單位:%)
從檢測(cè)車道的平均破損率來看,車道2的破損率最高,達(dá)1.91%,車道1和車道3的破損率相差不大。從每公里的破損率可以看出,路面破損情況并非在整個(gè)路段上都有發(fā)生,而是在局部路段出現(xiàn)較大的破損率數(shù)值,路面破損的類型以縱向裂縫和龜裂為主。破損率較小法路段上,路面損壞的類型以橫向裂縫、修補(bǔ)為主。
3.2 路面平整度
我國(guó)的路面平整度檢測(cè)通常采用四分之一車模型獲取國(guó)際平整度指數(shù)(International Roughness Index, IRI)指標(biāo)。本文基于車轍處的激光點(diǎn)云數(shù)據(jù),仿照連續(xù)式平整度儀評(píng)估路面平整度標(biāo)準(zhǔn)差σ,即在車輪的位置沿路面縱向位置按照一定的采樣間隔,采集測(cè)試的高程信息,采用數(shù)理統(tǒng)計(jì)的方法統(tǒng)計(jì)方差。車輪位置選擇離車道邊界0.5m處。
我國(guó)交通部公路科學(xué)研究所經(jīng)過大量試驗(yàn)研究,提出了σ與IRI的關(guān)系:σ=0.6×IRI。
表2列出了基于縱向激光點(diǎn)云數(shù)據(jù)計(jì)算的平整度指數(shù)IRI的檢測(cè)結(jié)果。

表2:平整度指數(shù)IRI檢測(cè)結(jié)果(單位:m/km)
根據(jù)平整度的檢測(cè)結(jié)果,三個(gè)車道的平整度值相差不大,平整度IRI值超過2.00m/km的僅有2個(gè)路段,其余基本都在此之下。
3.3 路面構(gòu)造深度
路面構(gòu)造深度是表現(xiàn)路面宏觀粗糙度、路表面排水及抗滑性能的重要指標(biāo)。目前我國(guó)公路路面構(gòu)造深度以鋪砂法為標(biāo)準(zhǔn)測(cè)試方法,其他方法的檢測(cè)結(jié)果須轉(zhuǎn)化為鋪砂法的路面構(gòu)造深度。本文根據(jù)鋪砂法的檢測(cè),基于路面激光點(diǎn)云三維信息計(jì)算構(gòu)造深度。
鋪沙法是將已知體積(25cm3)的標(biāo)準(zhǔn)砂攤鋪在測(cè)試路面上,用底部粘有橡膠片的推平板盡量將砂推平成一圓形,用鋼尺測(cè)量所構(gòu)成圓的兩個(gè)垂直方向的直徑,取其平均值,精確至5mm。砂的體積與所攤鋪圓平均面積之比即為路面的構(gòu)造深度,準(zhǔn)確至0.01mm。取平均值代表該路面這一點(diǎn)的構(gòu)造深度。計(jì)算公式為:

式中,MTD表示路表面的構(gòu)造深度;V為砂的體積(一般取25cm3),D為攤平砂的平均直徑。
本文仿照鋪砂法的原理,以一定的間距沿車轍帶選擇測(cè)點(diǎn)。預(yù)設(shè)一個(gè)虛擬鋪砂直徑D0,基于采集的點(diǎn)云三維信息計(jì)算虛擬鋪砂體積V0,與標(biāo)準(zhǔn)鋪砂體積(25cm3)比較,基于一個(gè)線性模型糾正虛擬鋪砂直徑D1,再次計(jì)算體積V1,使用式(1)計(jì)算構(gòu)造深度。檢測(cè)結(jié)果如表3所示。
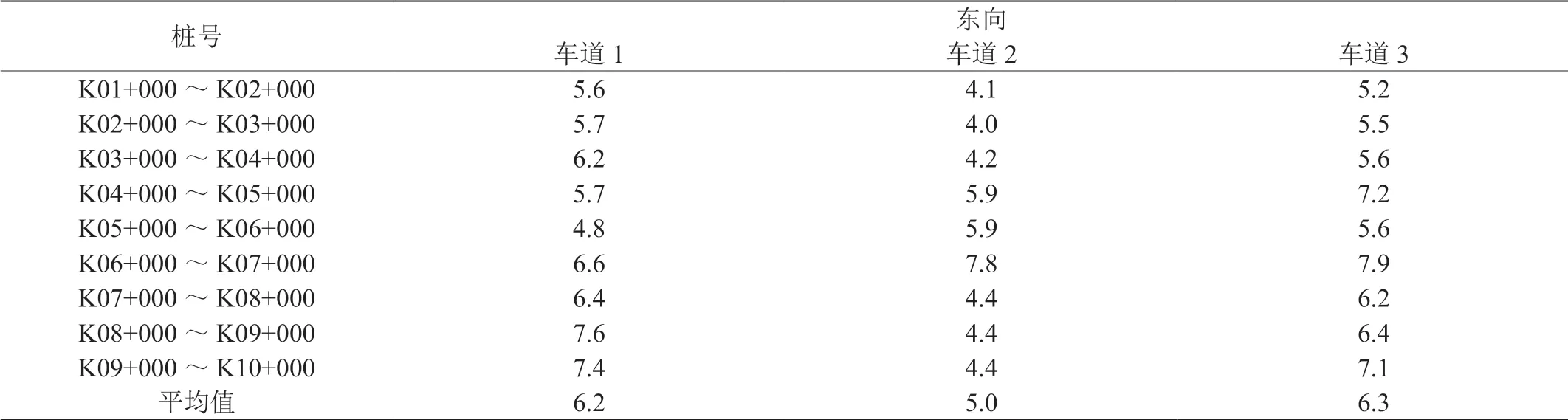
表3:路面構(gòu)造深度檢測(cè)結(jié)果(單位:mm)
根據(jù)路面構(gòu)造深度的檢測(cè)結(jié)果,各路段數(shù)據(jù)沒有顯著的差異。
3.4 與常規(guī)方法的比較
本實(shí)例為長(zhǎng)深高速公路全線路況評(píng)定的一部分,已有用常規(guī)技術(shù)手段提供的結(jié)果。本文將利用車載激光掃描得到的路面指標(biāo)與常規(guī)方法評(píng)估的路面狀況進(jìn)行比較,以驗(yàn)證車載激光掃描技術(shù)對(duì)路況調(diào)查的技術(shù)適應(yīng)性。由于全線路路面損害也使用了基于圖像的方法,因此,只比較了路面平整度和路面構(gòu)造深度評(píng)估的差異。
比較結(jié)果表明,基于路面掃描點(diǎn)云評(píng)估的構(gòu)造深度結(jié)果基本與使用鋪砂法評(píng)估的結(jié)果相符,在一處存在較大偏差,經(jīng)查,是由于此路段車轍雜亂,本文統(tǒng)一使用車道一側(cè)0.5m不符合路面實(shí)際狀況所致。總體評(píng)價(jià),基于車載激光點(diǎn)云可以開展路面構(gòu)造深度的評(píng)估。
通過比較結(jié)果可知,使用局部路面方差評(píng)估的路面平整度與常規(guī)方法(1/4車模型)的結(jié)果有明顯的差異,然而,隨里程的變化趨勢(shì)基本一致。因此本文建議對(duì)2種技術(shù)手段獲取的IRI進(jìn)行線性回歸,使二者的結(jié)果盡量相符。然而,平整度檢測(cè)的方法和設(shè)備多樣,采用的指標(biāo)也不盡相同,為使車載激光點(diǎn)云數(shù)據(jù)適用于路面平整度的計(jì)算,有必要構(gòu)建適合此種數(shù)據(jù)的模型,并與通用IRI檢測(cè)方法獲取的結(jié)果在一段距離的路面上校準(zhǔn)。
4 結(jié)論
車載激光掃描系統(tǒng)已逐漸應(yīng)用于道路工程,本文嘗試使用車載掃描數(shù)據(jù)評(píng)估路面狀況,提取了路面損害、路面平整度、路面車轍的評(píng)價(jià)指標(biāo),與實(shí)測(cè)數(shù)據(jù)、路面檢測(cè)車等提供的結(jié)果作比較,驗(yàn)證了該技術(shù)對(duì)于路況評(píng)估的技術(shù)適應(yīng)性和精度。實(shí)驗(yàn)證明,利用車載激光掃描數(shù)據(jù)評(píng)估路況是可行的,但需預(yù)先在一定長(zhǎng)度的路段上對(duì)結(jié)果的不確定性進(jìn)行評(píng)測(cè)與校準(zhǔn)。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48