基于數字信號處理的舵角反饋指示系統
2021-09-18 08:36:06呂旭胡柏青李開龍田佳玉雷娜
艦船科學技術 2021年8期
呂旭,胡柏青,李開龍,田佳玉,雷娜
(1.海軍工程大學 電氣工程學院,湖北 武漢 430033;2.錦州航星集團錦州航星船舶科技有限公司,遼寧 錦州 121001)
0 引言
隨著我國對海洋開發的需要,海洋工程裝備以及高新技術船舶列為《中國制造2025》的十大重要領域,整體的產品設計與制造正朝著數字化、網絡化、智能化的方向發展[1–2]。其中舵角反饋指示系統是現代艦船上不可缺少的導航設備,其主要的功能是自動高精度輸出當前船舶的舵葉方位,以保證船舶平時安全航渡和惡劣環境時精準航行[3–4]。因此,舵角反饋指示系統性能優劣將直接關系到船舶航行的安全,并直接影響船舶的生命力[5]。
傳統的舵角反饋指示系統主要由自整角機式同步跟蹤系統和電位計式舵角指示組成,其靈活性、操控性、穩定性等相對欠缺。自整角機同步指示系統接線較為復雜,其主要由單相激磁繞組的小型異步電機[6]、連接線纜、儀表等組成;自整角機的定子和轉子線圈是采取微行滑環,容易造成接觸不良問題,指示儀表使用電磁裝置,易受到外界環境干擾,經常需要調零[7]。同時考慮產品的經濟性,其設計成本較高。
本文定性分析了產生這一問題的原因,提出并設計了一種基于數字信號處理的舵角反饋指示系統。以單片機為控制核心,采用模塊化電路設計,通過無需參考點及無需記憶的絕對值編碼器進行角度信息采集,結合數據程序處理解決以上問題。通過半實物模擬仿真實驗,證明了基于數字信號處理的舵角反饋指示系統的可行性,降低了設計成本。
1 系統硬件模塊設計
舵角反饋指示器是用于指示船舶航行時舵葉位置的儀器,即舵角的數值。基于數字信號處理的舵角反饋指示系統是在原自整角機的基礎上改進設計。該舵角反饋指示器硬件系統主要由舵角發送器、接收器、接線箱、調光器以及若干個由接收器組成的三面舵角指示器、嵌入式舵角指示器、壁掛式舵角指示器等組成。系統硬件結構框圖如圖1 所示。
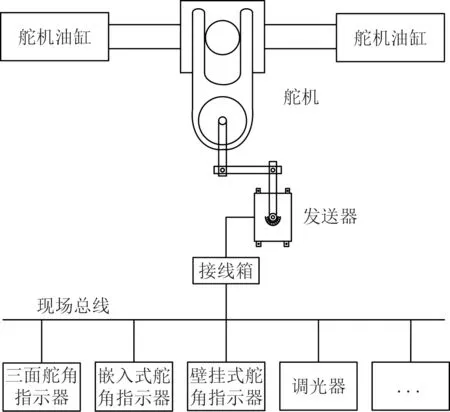
圖1 系統硬件結構方框圖Fig.1 The block diagram of hardware structure
由圖1 可知,發送器安裝在舵機艙,舵角發送器的連桿與舵桿以平行四邊形相連接,操作方便、靈活可靠。發送器是通過STC 系列單片機為控制器,以標準modbus RTU 協議采集具有64 圈絕對值高精度編碼器模塊角度信號,并將角度信號通過自身容錯機制等程序處理以數字信號形式傳送給接線箱,通過現場總線將舵葉位置信發送給各個舵角接收器。為了使上傳的數據都能及時有效傳遞給每個舵角接收器,在接線箱位置采取信息并行發送方式,即便某條通信鏈路出現問題也不會影響其他舵角接收器的信息通信,提高系統的可靠性,降低了系統風險。由接收器組成舵角指示器通過驅動步進電機32 細分的方式,使指針旋轉更加平穩,舵角信息更加直觀。需要操舵時,操舵人員可以觀察舵角接收器的數據信息,來獲知當前舵葉所在的位置。舵角指示器帶內部照明,其調光器可安裝在指示器上,也可獨立布置。
2 電路接口設計
舵角發送器主要由單片機控制模塊、按鍵模塊、指示燈模塊、串行口通信模塊、數據存儲模塊和外部接口模塊等組成。發送器電路接口連接圖2 所示。
由圖2 可知,發送器的位置信息來源于絕對編碼器,絕對編碼器可以將機械角度位置信號轉換為數字信號,再通過串行口傳送給發送器控制板,當發送器控制板正確接收到該信息時,編碼器指示燈點亮。發送器具有校準功能。在控制板上有設置開關、左舵設置、右舵設置、零位設置4 個按鍵。需要設置時,將設置開關撥至開的位置,將舵機分別打到左35°、0°、右35°位置,按下相應的按鍵完成校準。如欲設置零位,首先令舵機行走到機械標尺的零位,將設置開關撥至打開的位置,此時設置指示燈點亮,零位指示燈閃爍,按下零位設置按鍵,零位指示燈平光,代表設置成功。CPU 會將設置的參數存入數據存儲芯片中。
舵角發送器主要由單片機控制模塊、按鍵模塊、指示燈模塊、串行口通信模塊、步進電機驅動模塊和外部接口模塊等組成。接收器電路接口連接圖如圖3 所示。

圖3 接收器接口連接圖Fig.3 Wiring diagram of receiver interface
由圖3 可知,舵角接收器采用步進電機帶指針完成角度指示。舵角接收器主要由控制板,步進電機、齒輪、齒帶組成。控制板將接收到的角度信號轉換成步進電機的脈沖信號,經步進電機驅動器放大后驅動步進電動機轉動,步進電動機帶動指針或通過齒輪、齒帶帶動指針完成角度指示的任務。該舵角指示器采用步進電機32 細分的行走方式,使指針旋轉更加平穩。此外還考慮到舵機轉速和步進電機指針轉速匹配的因素,采用舵角指針轉速智能匹配技術使指針的轉動更加平穩,便于讀數。
3 控制系統軟件設計
舵角反饋指示器軟件部分主要由舵角發送器軟件和舵角接收器軟件組成。舵角發送器軟件和舵角接收器軟件均通過RS-485 現場總線通訊方式進行數據交換完成本系統功能。舵角發送器軟件主要包括設置模式和工作模式。舵角發送器控制策略流程圖如圖4 所示。
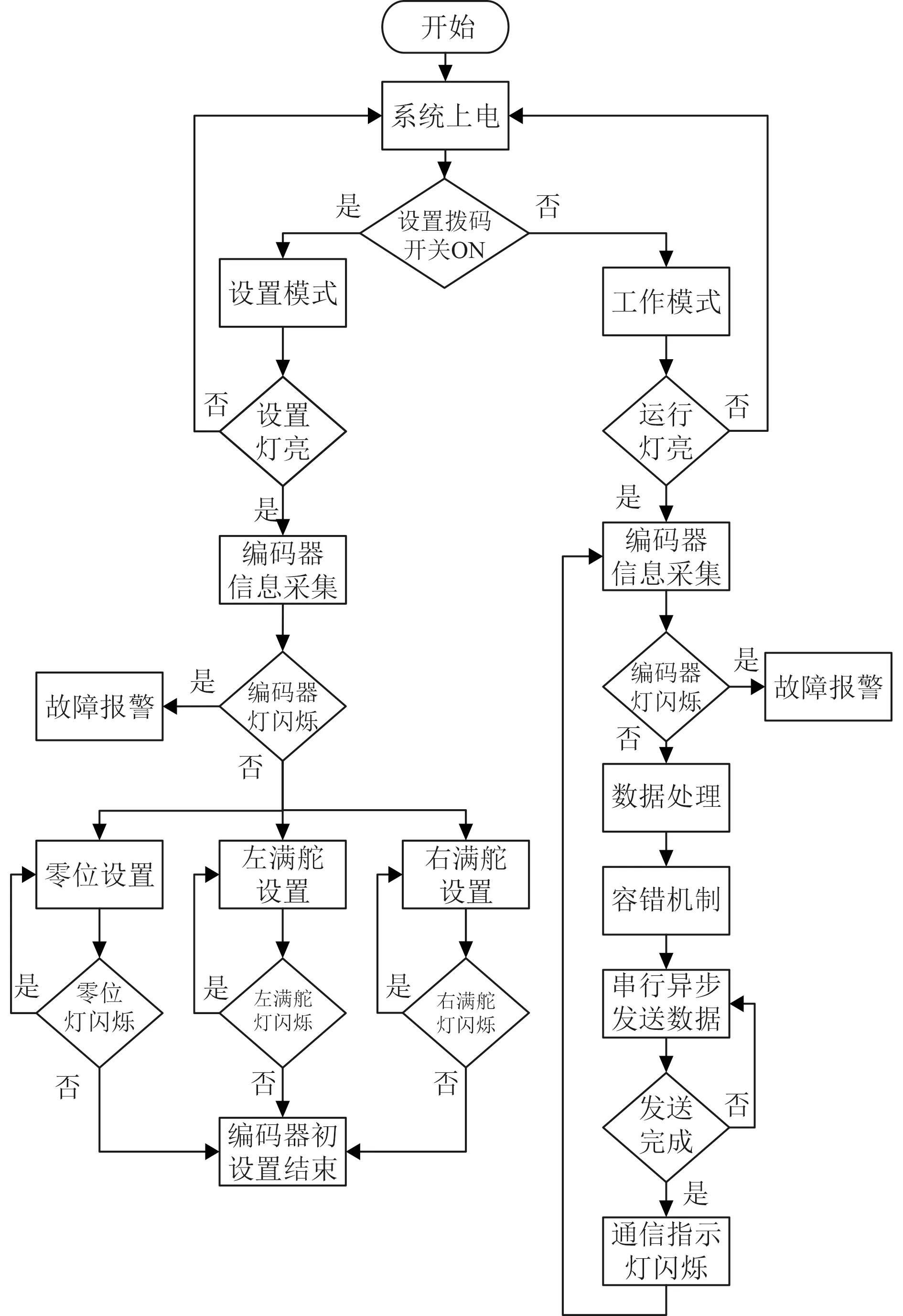
圖4 發送器控制程序流程圖Fig.4 Flow chart of the Transmitter control program
由圖4 可知,系統通上電后,會通過判斷撥碼開關的實際位置,用以設置系統的實際模式。系統為設置模式時,對應設置指示燈常亮。系統開始采集編碼器信息,若發生故障,編碼器燈閃爍,則發出故障報警。機械舵或舵角發送器調整到零位后,對應按下零位按鍵,設置后零位指示燈由閃爍轉為常亮。機械舵或舵角發送器調整到左/右滿舵后,對應按下左/右滿舵按鍵,設置后對應指示燈由閃爍轉為常亮。若不滿足系統需求,可從新復位開關設置信息。當系統處于正常工作模式時,主要進行數據采集,數據處理,將數據信息發送至RS-485 現場總線上。
舵角接收器從RS-485 總線上讀取舵角的數值,依據接收到的數據及時驅動電機運轉,跟隨指示船舶航行時舵葉位置。舵角發送器控制流程圖如圖5 所示。

圖5 接收器控制程序流程圖Fig.5 Flow chart of receiver control program
接收器上電時,首先要進行零位檢測,如果檢測不到零位,接收器將停止工作,零位指示燈閃爍。當接收器檢測零位時,步進電機旋轉,零位檢測傳感器工作,同時帶動指針指示到“0”刻度位置,零位指示燈平光。按照發送器發送過來的角度信息旋轉,指示舵葉的位置。若接收不到發送器的正確信息,接收器就會停在零位,同時通信指示燈閃爍,若為正確信息,通信指示燈平光。當需要將機械指針對零時,按下“調零”按鍵,步進電機就會回到零位,此時零位指示燈平光,通信指示燈熄滅,當再次按下此按鍵時,恢復通信,通信指示燈點亮,若此刻發送器在零位,零位指示燈點亮,否則零位指示燈熄滅。
4 實驗測試
半實物模擬仿真平臺由一個舵機運動模擬裝置和一個檢測機柜組成。舵機運動模擬裝置通過步進電機、齒輪、連桿帶動舵角驅動軸,并與反饋驅動機構輸入軸固連,使操舵儀反饋機構獲得反饋舵角。半實物模擬仿真平臺如圖6 所示。
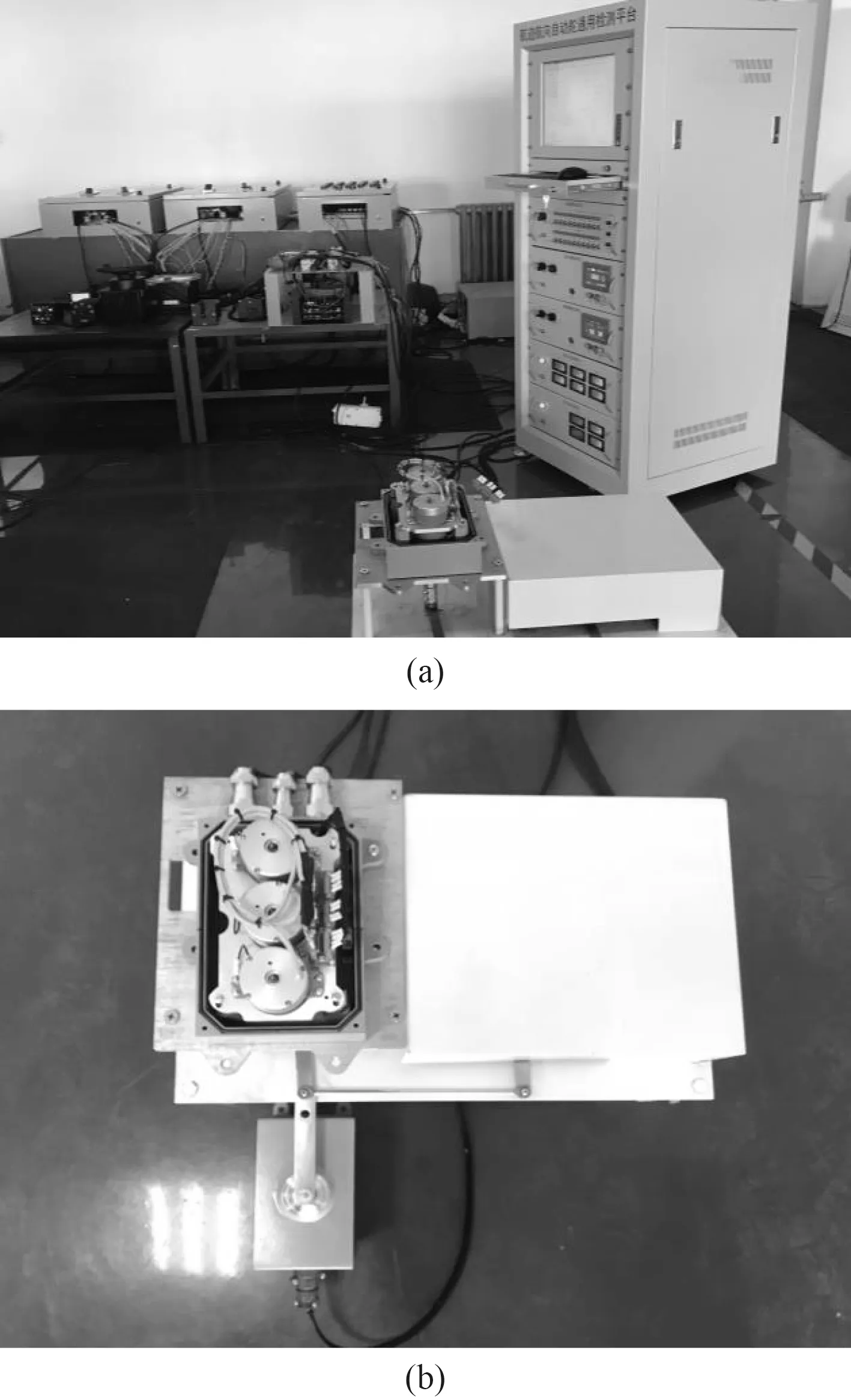
圖6 半實物模擬仿真平臺Fig.6 Semi-physical simulation platform
為了驗證本文所研究的舵角反饋指示系統的有效性,采用半實物模擬仿真平臺模擬艦船航行實驗,以一套高精度舵角反饋裝置為參考基準,比較舵角反饋指示器的計算效果。該實驗要求主要包括:船舶類型為中;回轉系數0.11 s;應舵系數15 s;轉舵時間20 s;舵機延遲0 s;初始舵角0°;船速為15 kn。航行1 540 s,船舶操縱運動界面7 所示,舵角比較如圖8 所示。
由圖8 可知,通過半實物物理仿真平臺共操舵4 次,其中左向操舵分別為1°,5°,10°,右向操舵10°。顯然在操舵實驗過程中,本文所設計的舵角反饋指示系統真實的反應舵角信息,其對應誤差均值及均方差如表1 所示。
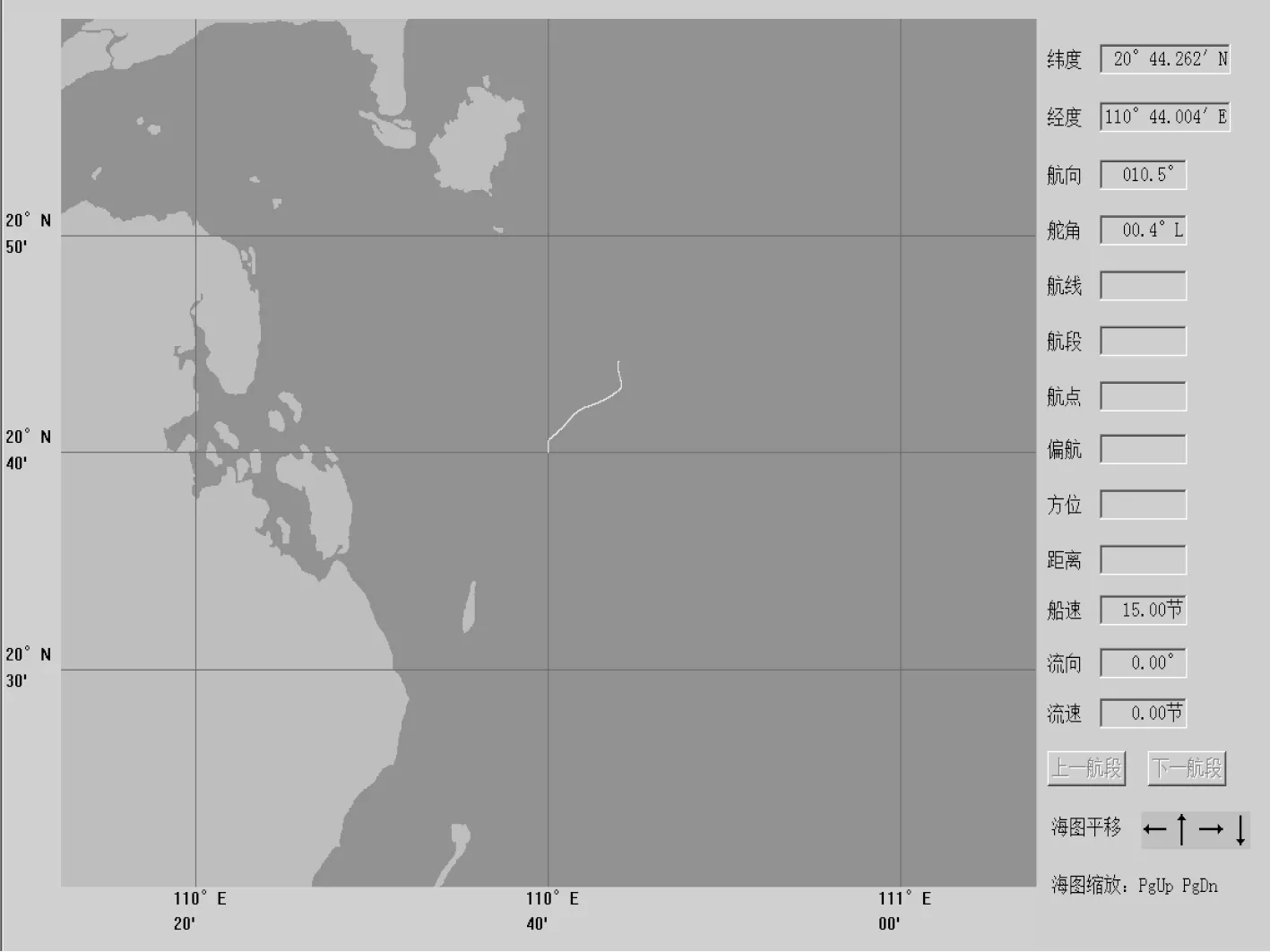
圖7 船舶操縱運動界面Fig.7 Ship maneuvering interface

圖8 舵角對比Fig.8 Comparison on rudder angle

表1 舵角誤差均值和均方差Tab.1 Mean values and mean variances of errors of Rudder angle
由表1 可知,基于數字信號處理的舵角反饋指示系統舵角計算誤差較小,滿足中國船船級社船舶建造規范中所要求的誤差精度,說明該系統能夠很好跟蹤實時舵葉信息,驗證了該系統的有效性。
5 結語
本文設計了基于數字信號處理的舵角反饋指示系統,該系統以單片機為核心控制器,采用標準modbus RTU 協議采集具有64 圈絕對值高精度編碼器信息,通過相應控制機制進行信息處理,以現場總線的方式進行數據信息擴展,解決了傳統自整角機式同步控制器精度低、靈活性不強、成本高等問題。半實物模擬仿真平臺模擬艦船航行實驗,證明了本文設計的舵角反饋指示系統是有效的、可行的。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
少先隊活動(2021年4期)2021-07-23 01:46:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16