基于1560 nm外腔式激光器的拉曼光鎖相技術*
2021-09-17 06:08:24王凱楠程冰周寅陳佩軍朱棟翁堪興王河林彭樹萍王肖隆吳彬林強
物理學報 2021年17期
關鍵詞:信號
王凱楠 程冰 周寅 陳佩軍 朱棟 翁堪興 王河林 彭樹萍 王肖隆 吳彬 林強
(浙江工業大學理學院, 浙江省量子精密測量重點實驗室, 杭州 310023)
拉曼光產生技術是量子精密測量領域的一個重要研究內容, 是冷原子重力儀、冷原子陀螺儀等量子慣性傳感器的關鍵技術.對于銣87原子, 需要兩束頻差6.834 GHz且相位穩定的780 nm激光來產生拉曼光.基于兩臺外腔式780 nm激光器, 并利用光學鎖相環技術可以產生拉曼光, 但系統復雜、環境適應性不強.基于內腔式1560 nm激光器, 通過倍頻和電光調制技術也可以產生拉曼光, 雖然系統簡單、環境適應性強, 但測量性能受邊帶效應影響.受限于內腔式激光器的線寬及反饋帶寬性能, 一般無法利用光學鎖相環方法來產生拉曼光.鑒于此, 本文基于兩臺新型外腔式1560 nm激光器和自制鎖相電路系統, 實現了一套低相噪的拉曼光系統, 相位噪聲功率譜在1—10 kHz頻段低至–95 dBc/Hz.通過與780 nm雙激光器及混合雙激光器鎖相性能進行比較, 發現該方案略具優勢.此外, 通過分段積分的方法分析了該鎖相性能對冷原子干涉儀相位噪聲的影響.本文實驗結果為研制小型化、外場適用的拉曼光系統提供了一種方案.
1 引 言
冷原子干涉儀自出現以來得到迅猛發展, 目前已經成為量子精密測量領域的一個重要工具.基于冷原子干涉儀可以精確測量基本物理常數[1]、驗證等效原理[2,3]、尋找暗能量[4,5]等; 此外, 冷原子干涉儀還可以應用于高精度重力加速度[6,7]、重力場梯度[8,9]、旋轉角速度[10,11]、線加速度[12,13]等參數的測量, 為新一代量子慣性傳感器提供技術支撐.尤其是在冷原子重力儀領域, 冷原子干涉儀技術的成熟促進了小型化冷原子重力儀的發展[14?18], 目前其重力測量性能已經可以與傳統最好的絕對重力儀相媲美[14,19?22], 其可移動性、環境適應性也得到提升, 一些外場應用試驗逐漸開始出現[23?27].
冷原子干涉儀大多是基于拉曼光脈沖操縱原子物質波以實現分束、偏轉以及合束, 因此拉曼光產生技術一直是一個重要的研究內容.拉曼光的產生有多種方法, 主要包括: 聲光調制法、電光調制法和光學鎖相法.聲光調制法是基于聲光調制器(AOM)的正負一級邊帶產生拉曼光[28], 但是由于AOM工作在GHz的高頻段, 衍射效率不高, 且光路是自由空間, 傳輸易受環境干擾.電光調制法是利用電光調制器(EOM)產生GHz的邊帶與其載波形成拉曼光[29?40], 基于成熟的內腔式1560 nm激光器(分布式反饋激光器、光纖激光器等), 通過倍頻和電光調制技術可以產生拉曼光, 且調制效率高、技術成熟度高、環境適應性強, 但其調制邊帶容易引入不穩定的系統效應.光學鎖相法是利用光學鎖相環技術實現兩臺激光器的相位鎖定[41], 它是實驗室較為常用的一種拉曼光產生方法, 具有效率高、穩定性強的優點, 且不受邊帶效應的影響.通過增加鎖定環路帶寬、提高激光器性能, 基于780 nm外腔式激光器的鎖相性能在近年得到一定提升, 在0.1—100 kHz頻段的鎖相相位噪聲可優于–120 dB·rad2/Hz[42?44].為了簡化鎖相方案、增強環境適應性, 分布式布拉格反射(DBR)激光器[45]、分布式反饋(DFB)激光器[46]等內腔式激光光源也開始被用來搭建光學鎖相環系統, 但是初期并未得到較好的鎖相效果.通過改進DFB激光器, 鎖相的性能得到一定改善, 在100 Hz頻偏下的鎖相相位噪聲可達–70 dB·rad2/Hz[47?49].但是受限于內腔式激光器的反饋帶寬, 其鎖相性能較難進一步提高.目前常用的外腔式780 nm激光器雖然可以實現鎖相, 但易受環境影響不太適合在外場環境中使用.
鑒于上述問題, 本文基于一種新型的外腔式1560 nm激光器和自制鎖相電路系統, 利用光學鎖相法實現了拉曼光的產生.實驗上測量了激光器鎖相后的拍頻信號, 分析了相位噪聲曲線.此外, 還搭建了一套同步比對測試系統, 通過分析外腔式激光器的三種不同組合情況下的相位噪聲, 發現基于新型外腔式1560 nm激光器的鎖相性能略優于實驗室現有方案.最后, 以冷原子重力儀為例, 通過對相位噪聲曲線進行分段積分, 分析了鎖相噪聲對冷原子重力儀靈敏度的影響.本文實驗方案可擴展為全光纖, 為實現低相位噪聲、無邊帶效應、高穩定性、高可靠性、強環境適應性的拉曼光系統提供了一種新思路, 有望促進外場適用的量子慣性儀器研究的發展.
2 拉曼光鎖相的原理及方案
拉曼光鎖相環路是一個負反饋系統, 其原理示意圖如圖1所示.主激光器(ML)與從激光器(SL)的輸出光合束后被高速光電管(PD)接收, 接收到的信號在放大后與參考射頻信號混頻得到誤差信號, 經環路濾波器后反饋至從激光器的電流調制口, 用于調節頻率與相位使其與主激光器的頻率、相位同步變化.
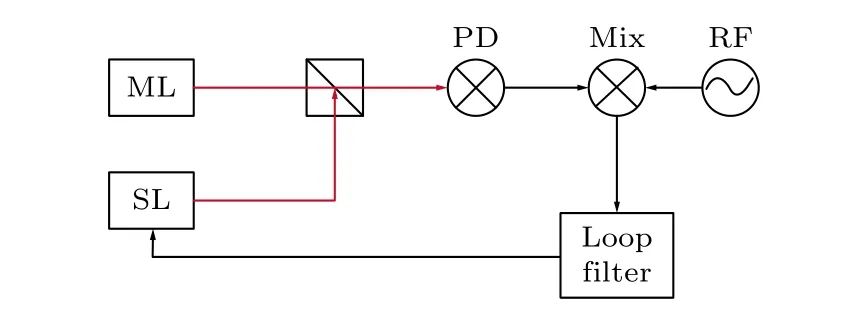
圖1 拉曼光鎖相的原理示意圖.ML, 主激光器; SL, 從激光器; PD, 高速光電管; Mix, 混頻器; RF, 射頻參考Fig.1.Schematic diagram of the optical phase-locked loop(OPLL) system.ML, master laser; SL, slave laser; PD,high-speed photodiode; Mix, mixer; RF, RF reference.
為了進一步分析光學鎖相環的原理, 從頻域上對其進行分析, 原理框圖如圖2所示.
由圖2可知, 拉曼光鎖相環路中參考信號的相位 ?ref(s) 可以表示為
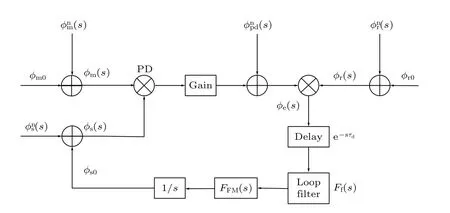
圖2 拉曼光鎖相的頻域原理圖Fig.2.Diagram in frequency domain for the system of OPLL.

從頻域分析該環路, 可得到開環傳遞函數Gop(s)為

其中 Kdc=KpdKfKs表示環路的直流增益, Kf,Ks分別表示環路濾波器的直流增益和從激光器電流頻率調制響應的直流增益, Ff(s) 是環路濾波函數,FFM(s)是從激光器的頻率響應函數, τd表示環路延時.閉環的傳遞函數可以表示為
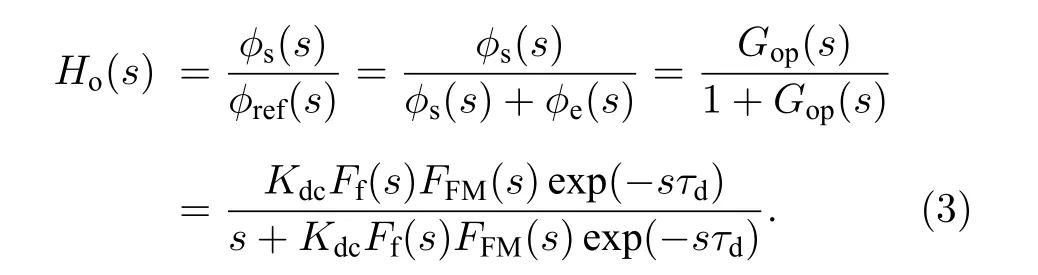
誤差的傳遞函數可表示為

基于(4)式可得從激光器的相位與環路內各信號源的相位之間的關系:

由(5)式可知, 主激光器的相位噪聲及高速光電管的散粒噪聲會通過閉環傳遞函數疊加至從激光器的相位, 射頻信號的相位噪聲及從激光器自身的相位噪聲通過誤差傳遞函數疊加至從激光器的相位.一般情況下, 閉環傳遞函數為低通濾波器,誤差傳遞函數為高通濾波器, 濾波器帶寬為從激光器能跟隨主激光器相位的最大帶寬.綜上分析, 環路帶寬、環路各部分引入的相位噪聲是影響整個環路鎖相性能的主要因素.
3 拉曼光鎖相實驗
實驗系統的示意圖如圖3所示, 主要是為了評估基于新型外腔式1560 nm激光器鎖相的性能.因為拉曼光是針對銣87原子設計的, 需要兩束頻差6.834 GHz且相位穩定的780 nm激光來實現.因此外腔式1560 nm激光器需要通過摻鉺光纖放大器(EDFA)放大, 經周期性鈮酸鋰晶體(PPLN)倍頻至780 nm.結合實驗室正在使用的外腔式780 nm激光器, 設計三種組合方式來研究不同激光器之間鎖相的性能.組合1和組合3分別是外腔式1560 nm激光器系統(FL1和FL2)和780 nm激光器系統(DL1和DL2)各自鎖相, 組合2是兩系統(FL2和DL1)之間進行鎖相.組合3是實驗室正在使用且比較成熟的鎖相方案, 已經應用于多套小型化冷原子重力儀, 可以作為相對參考.組合1是需要驗證的激光器方案, 該方案具有無邊帶效應、環境適應性強的特點.組合2是對比實驗, 驗證兩種不同激光器的鎖相性能.三種組合方式除光源稍有不同外其余參數皆保持嚴格一致.
主激光器通過頻率調制譜(FM)鎖定在87Rb D2線的 Fg=1→Fe=1 共振躍遷上, 從激光器通過調整參數使其頻率基本在87Rb D2線Fg=2→Fe=1共振躍遷處.主、從激光器分別分出1.5 mW激光, 兩束激光合束后通過高速光電管探測拍頻信號.該信號首先經低噪聲放大器放大至0 dBm, 再通過定向耦合器將信號分為兩部分, 一部分(約–10 dBm)輸送給頻譜分析儀(SA)用于測量拍頻信號評估環路鎖相性能, 另一部分用于跟參考的7 GHz信號進行混頻.混頻后得到一個165.317 MHz左右的低頻信號送給自制的頻率相位探測模塊(PFD), 該模塊先將輸入的信號送入分頻器進行二分頻, 后將其與直接數字頻率合成器(DDS)的信號進行頻率相位探測, 再積分放大后得到與之對應的誤差信號, 送入比例積分微分(PID)控制系統,根據環路需求對信號進行處理后反饋給激光器的調制口, 從而控制從激光器的輸出頻率和相位, 形成閉環控制.
4 鎖相結果與分析
4.1 拍頻信號及其噪聲功率譜
由第2節分析可知, 鎖相的誤差信號可以表示為

由于三種組合方案除光源外其余部分均保持一致,我們分出一部分拍頻信號作為監測點(如圖3所示), 通過分析鎖相后的拍頻信號譜線及其噪聲功率譜來評估鎖相性能.針對組合1, 由頻譜分析儀測量到的拍頻信號譜線如圖4所示, 該信號的線寬與頻譜分析儀最高分辨率(1 Hz)相當, 即激光器的鎖定線寬小于1 Hz; 此外, 由拍頻信號譜線還可以分析出環路帶寬約為0.8 MHz.
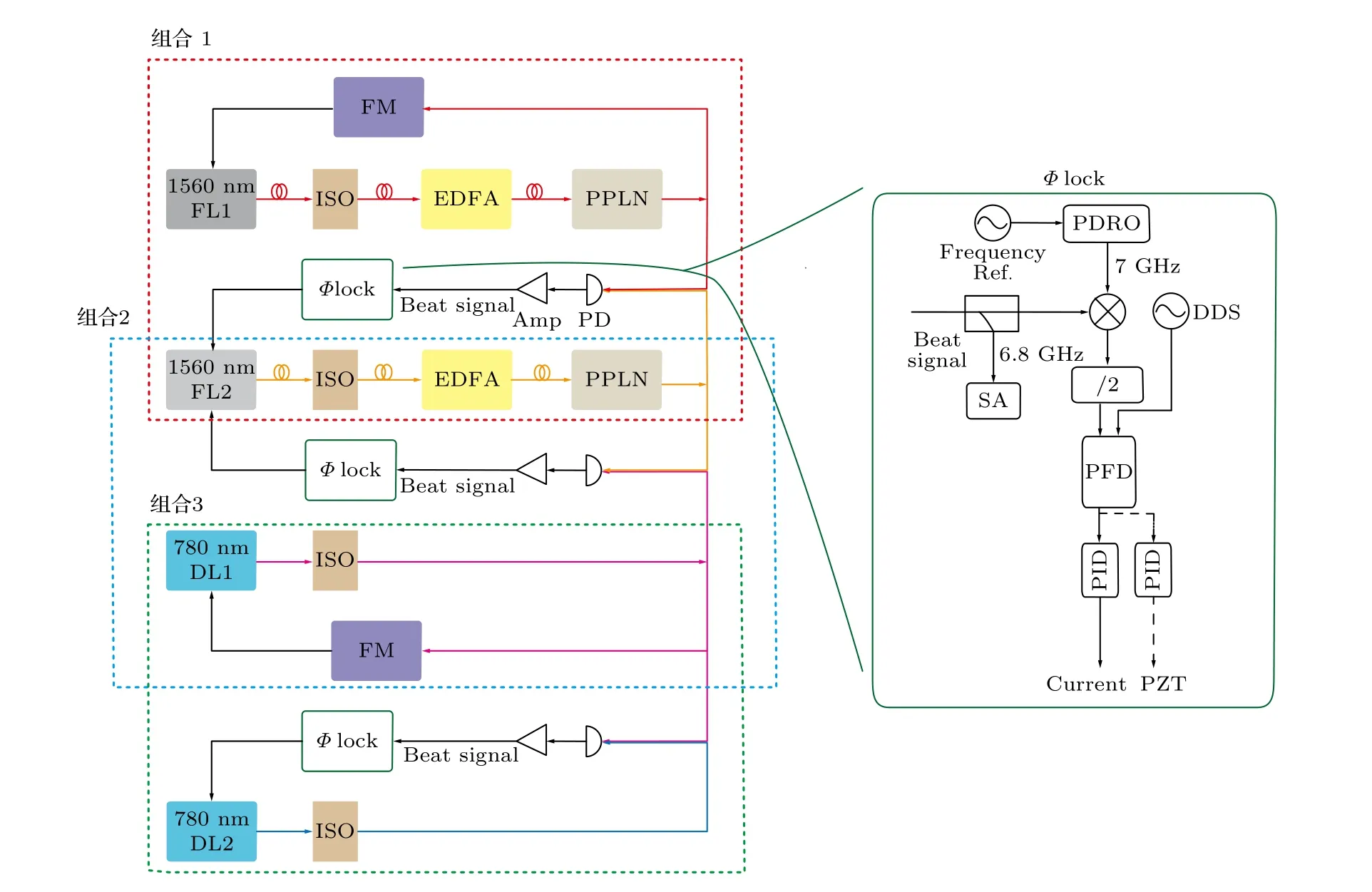
圖3 實驗系統示意圖.1560 nm FL1, 光纖激光器; 1560 nm FL2, 外腔式光纖輸出型激光器; 780 nm DL1和780 nm DL2, 外腔式激光器; ISO, 隔離器; EDFA, 摻鉺光纖放大器; PPLN, 周期性鈮酸鋰晶體; FM, 頻率調制光譜; PD, 高速光電管; Amp, 低噪聲放大器; Beat signal, 拍頻信號; Φ lock , 相位鎖定方法; SA, 頻譜分析儀; PFD, 頻率相位檢測模塊; PID, 比例積分微分控制模塊; DDS, 直接數字合成器; Frequency Ref, 頻率參考; /2, 二分頻; Current, 電流調制口; PZT, 壓電陶瓷調制口; PDRO, 鎖相介質振蕩器Fig.3.Schematic diagram of the experimental system.1560 nm FL1, fiber laser; 1560 nm FL2, fibered laser; 780 nm DL1 and 780 nm DL2, external cavity diode laser; ISO, isolator; EDFA, erbium-doped fiber amplifier; PPLN, periodic lithium niobate crystal;FM, frequency modulation spectroscopy; PD, high-speed photodiode; Amp, low noise amplifier; Beat signal, Beatnote signal;Φlock,phase locking method; SA, spectrum analyzer; PFD, frequency phase detector module; PID, the module of proportional integral derivative controller; DDS, direct digital synthesizer; Frequency Ref, frequency reference; /2, two-way frequency; Current, current modulation port; PZT, piezoelectric ceramic modulation port; PDRO, phase locked dielectric resonator oscillator.
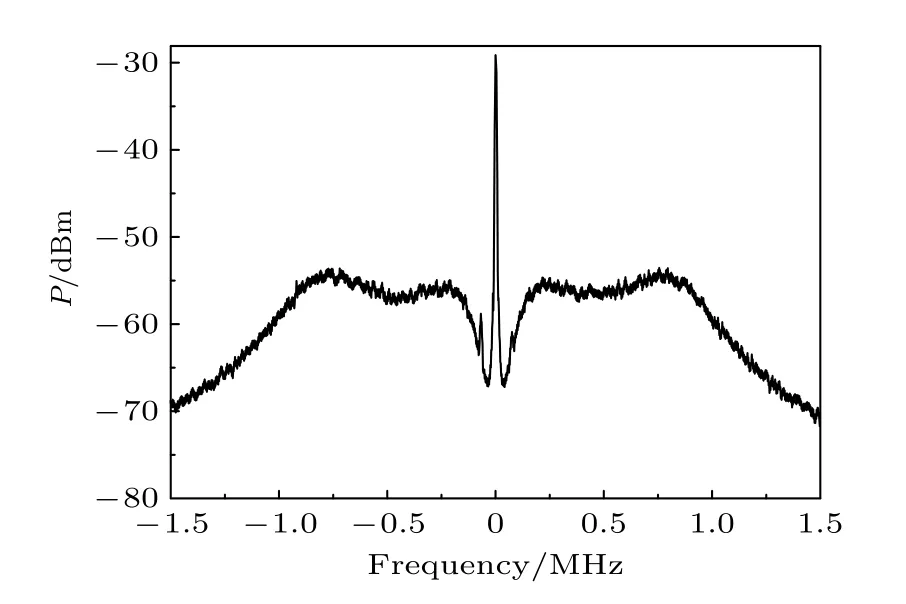
圖4 鎖相后的拍頻信號譜線Fig.4.Spectra of the closed-loop beat note.
對鎖相后的拍頻信號譜線做進一步處理, 可以得到其噪聲功率密度譜, 進而分析鎖相后的相位噪聲, 數據如圖5所示.紅線為拍頻信號(6.8 GHz)的相位噪聲功率譜, 黑線和藍線分別為DDS(82.6 MHz)和PDRO (7 GHz)輸出點的相位噪聲功率譜, 由(6)式知這兩項會直接影響最后的鎖相性能.分析圖5可知, 在10 Hz—1 kHz頻帶范圍內, 殘余誤差相位較小, 相位噪聲功率譜幾乎與PDRO的相位噪聲功率譜重合.在1 kHz—0.8 MHz頻帶范圍內, 相位噪聲能得到一定程度的抑制, 但是仍大于射頻參考器件引入的相位噪聲, 目前主要受環路帶寬、從激光器本身相位噪聲等因素影響.在頻率超過0.8 MHz之后, 由于超出環路帶寬, 不受環路控制, 相位噪聲是兩個光源本身的相位噪聲的疊加.
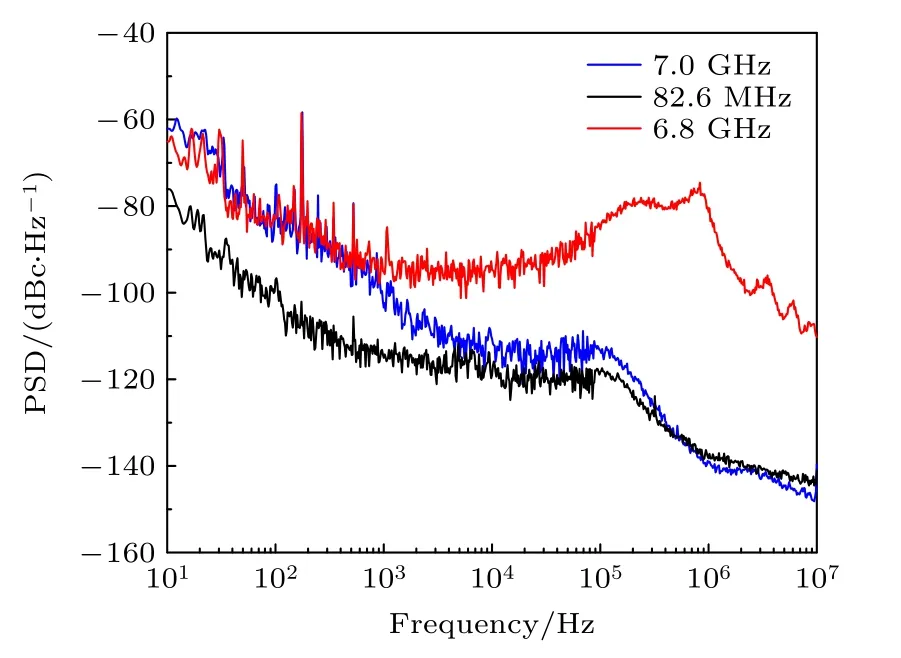
圖5 光鎖相環各部分的相位噪聲功率譜Fig.5.Phase noise spectral density for several parts of the OPLL system.
4.2 不同激光器組合進行鎖相的性能比較
如圖3所示, 針對實驗室現有的激光器, 設計了三種組合方式來評估基于1560 nm外腔式激光器的鎖相性能.組合1是需要驗證的新方案, 組合2是交叉檢測方案, 組合3是實驗室正在使用的成熟方案.通過對比和分析這些組合方案的測量結果, 可以詳細評估鎖相性能.在基本保證實驗條件不變的情況下, 三種組合方式測量到的噪聲功率譜線如圖6所示, 圖中黑線、紅線、藍線分別對應組合1、組合2、組合3方案的測量結果.由圖6可知,組合1和組合3方案的噪聲功率譜線在10 Hz—1 kHz頻率范圍內幾乎重合, 在1—80 kHz頻率范圍內, 組合1的相位噪聲略低于組合3.組合1和組合3的拍頻信號噪聲功率譜在1—10 kHz頻率范圍內分別可達–95和–92 dBc/Hz.由組合2和組合3的實驗曲線可知, 在10 Hz—80 kHz頻率范圍內, 兩套方案的測量結果基本重合, 其相位噪聲功率譜的差別主要由主激光器本身的相位噪聲引入.
拉曼光相位噪聲是冷原子重力儀的主要噪聲源, 下面分析三種組合方案的鎖相性能對原子干涉儀噪聲的貢獻.基于圖6的相位噪聲功率譜, 結合原子干涉儀的傳遞函數, 通過分段積分方法可以得到該相位噪聲對原子干涉儀的影響.計算結果如圖7所示, 黑線、紅線、藍線分別對應組合1、組合2、組合3.經過分析, 在10 Hz—1 kHz頻帶范圍內, 三種組合方案的相噪對原子干涉儀相位的貢獻基本一致; 在1—80 kHz, 組合1比組合2、組合3略好一點.總體上, 三種組合方案在1—500 kHz范圍內, 原子干涉儀相位噪聲的幅度一直增加, 該頻段對整個相噪的貢獻較大; 在100—500 kHz之間存在一個峰, 該峰可以通過調節控制環路的PID參數將其推至更高頻段, 以此優化鎖相性能,但是該峰不可能推至環路帶寬以外, 目前是限制鎖相性能的主要因素之一.
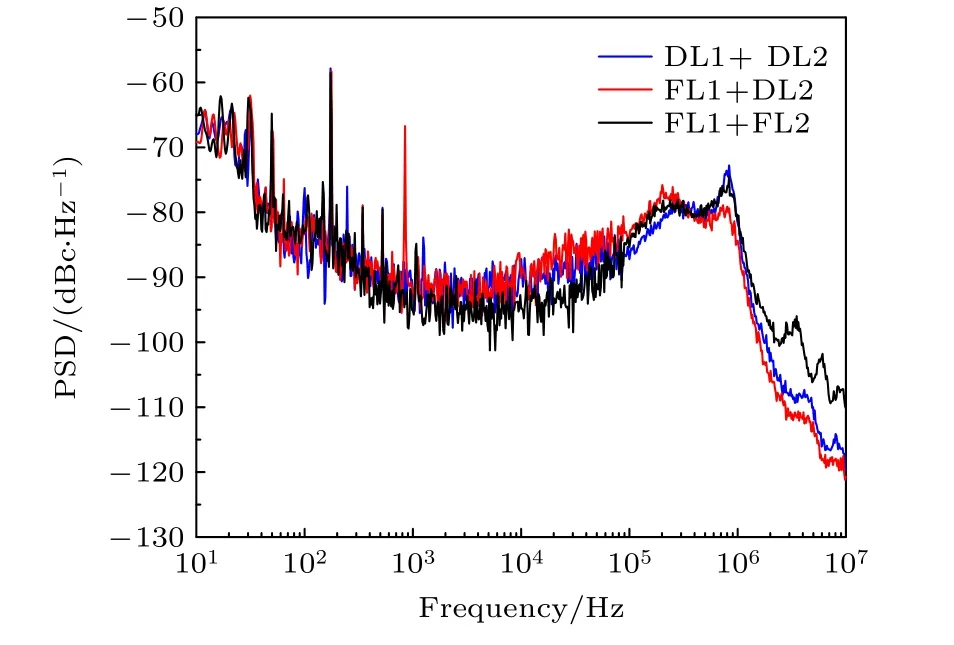
圖6 三種激光器組合鎖相后的相位噪聲功率譜Fig.6.Phase noise spectral density for three kinds of combinations of the lasers.
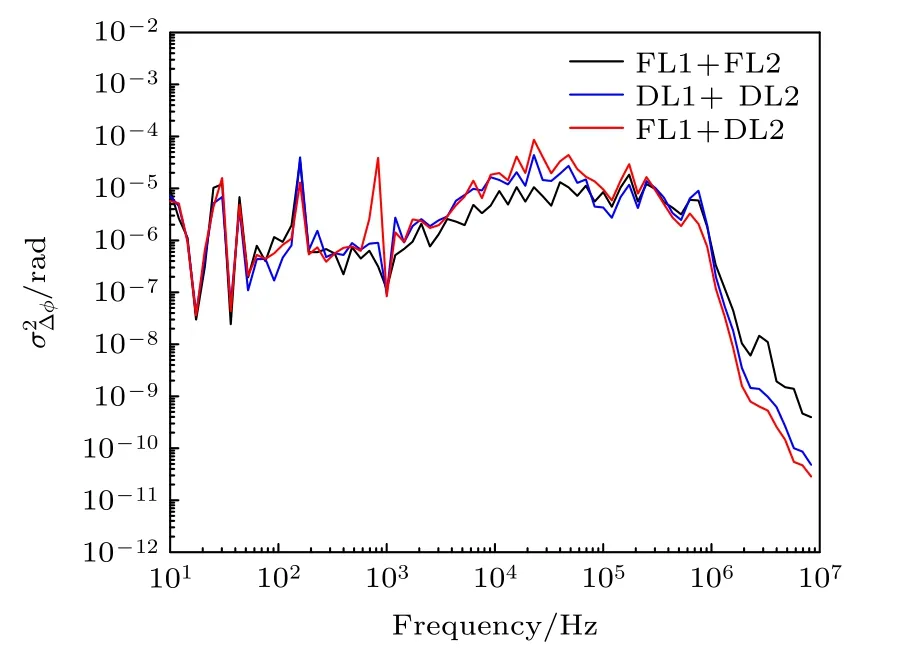
圖7 相噪分段積分的結果Fig.7.Results of subsection integral based on the phase noise spectra.
以冷原子重力儀為例, 進一步分析該相位噪聲對重力測量性能的影響.假設三束拉曼脈沖作用時間分別為5, 10和5 μs, 拉曼脈沖之間的時間間隔為50 ms, 可得到三種組合方案下拉曼光相位噪聲對重力測量噪聲的影響.如圖8所示, 組合1、組合2和組合3方案下的拉曼相位噪聲貢獻分別為17.59, 25.41和20.88 mrad, 單點對重力測量噪聲的貢獻為43.69, 63.11和51.85 μGal.

圖8 相噪對重力測量性能的影響Fig.8.Influence of the phase noise on the gravity measurement performance.
上述實驗結果表明, 基于新型外腔式1560 nm激光器鎖相的方案是可行的, 其鎖相性能與傳統外腔式780 nm激光器鎖相的性能相當, 這為冷原子重力儀、冷原子陀螺儀等量子慣性器件的小型化、工程化、集成化提供了一種新的方案.選用新型外腔式1560 nm激光器, 有望構建全光纖光學系統,提高光功率的利用率, 同時提升儀器的穩定性和環境適應性.目前, 該新型激光器的鎖相方案仍面臨一些問題, 鎖相性能受環路帶寬限制; 激光器的線寬、響應及相位噪聲影響鎖定效果.未來, 可以通過外加調制器增加環路帶寬、優化環路控制環路、減小環路延時等方式提高鎖相性能.
5 結 語
本文基于一種新型的外腔式1560 nm激光器,利用光學鎖相法實現了一套拉曼光系統.通過測量到的激光器拍頻信號光譜分析了鎖相后的相位噪聲, 結果表明, 在1—10 kHz頻率范圍內, 相位噪聲幅度優于–95 dBc/Hz.此外, 通過搭建的一套比對測試系統, 研究了三種組合方案的鎖相性能, 評估了新型外腔式1560 nm激光器鎖相方案的可行性.通過分段積分方法, 分析了該鎖相效果對冷原子干涉儀相位的影響, 并以冷原子重力儀為例計算了其對重力測量性能的貢獻.該鎖相方案相較于常用的780 nm激光器鎖相方案可擴展為全光纖, 為實現低噪聲、無邊帶效應、高穩定性、高可靠性、環境適應性強的拉曼光系統提供了一種新思路, 可促進外場適用的量子慣性儀器的應用研究.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06