基于grabcut分割算法的無人機樁位偏差檢測方法
2021-09-16 08:41:06段偉陳田陳思偉
中華建設 2021年9期
段偉 陳田 陳思偉
對基樁實際坐標與設計坐標的對比和測量是一項重要的質量評價工作。目前,采用常規測量手段進行樁位偏差檢測效率十分低下,本文采用大疆精靈Phantom 4 RTK無人機用于樁偏位檢測的外業數據采集,開發了無人機攝影測量檢測基樁偏位系統用于內業數據處理,使用grabcut分割算法用于對樁位的自動識別,將無人機得到的樁位坐標與設計圖紙上的樁位坐標進行對比就可以得到樁位偏差。通過實驗表明本文采用的方法可以極大的減少外業工作量,自動檢測成功率達到77%,使檢測效率得到了明顯提高。
一、引言
目前我國仍處于大規模基礎建設階段,建筑施工大面積鋪開。樁基礎是基礎工程中深基礎的一種形式,它通過把長樁打入土層,可以將建筑物的荷載通過承臺傳遞給有著一定剛度的基樁,并進一步傳遞至土地深部壓縮性更小、密實度更大的硬土層。大量建筑打入預制樁或澆筑混凝土樁形成樁基。根據相關規范要求,對建筑基樁的定位偏差及樁徑偏差有著嚴格的規定。為了校核樁位和設計樁位的偏差及樁徑偏差,需配備有經驗且專業的工程師進行現場測量。該現場測量過程耗時,效率低,且測量基準依賴于第三方劃定的軸線,容易形成爭議,且事后無法重現測量過程。
隨著旋翼無人機的出現,可以在低空對建筑工地進行全方位的成像。利用成像的方式獲取工地樁位情況,可采用圖像處理和分析工具進行更一步精確的測量,避免了現場的冗余工作和測量放線的爭議等,亦可全方位地監控測量過程,形成全過程的樁位測量檔案。依靠無人機的成像能力,設計相應的圖像處理和分析算法,通過軟件開發和集成,可研發一種全新的建筑樁位圖像測量系統。從圖像采集、相機定標和圖像分析以及最終的報告生成等測量環節入手研究算法和工具,提供完整的精確建筑樁位測量手段,為檢測單位提供核心的競爭技術和服務。
在獲取無人機影像之后,依靠人手工提取每根樁的位置會造成效率低下的問題,在檢測樁位數量較多的情況下會花費較多的時間,難以滿足快速檢測的需求。本文中采用grabcut分割算法對樁位進行自動識別,并通過實驗驗證該算法的有效性。
二、檢測流程
主要的檢測流程包括使用Phantom 4 RTK無人機獲取圖像和開發無人機攝影測量檢測基樁偏位系統用于數據處理。
1.Phantom 4 RTK無人機
精靈 Phantom 4 RTK 是一款小型多旋翼高精度航測無人機,面向低空攝影測量應用,具備厘米級導航定位系統和高性能成像系統,便攜易用,全面提升航測效率。精靈Phantom 4 RTK通過將飛控、相機與RTK的時鐘系統實現微秒級同步,相機成像時刻毫秒級誤差,并對相機鏡頭中心點位置和天線中心點位置進行補償,在RTK精準定位的同時,減少位置信息與相機的時間誤差,使影像獲得更加精確的位置信息,滿足高精度航測需求。1英寸2000萬像素CMOS傳感器捕捉高清影像。每個相機鏡頭都經過嚴格工藝校正,以確保高精度成像。畸變數據存儲于每張照片的元數據中,方便用戶使用后期處理軟件進行針對性調整。機械快門支持高速飛行拍攝,消除果凍效應,有效避免建圖精度降低。
晴天環境下飛行,風速小于4 m/s,飛行高度100米,地面采樣距離(GSD)2.74厘米,航向重疊率80%,旁向重疊率70%,可以達到的定位精度如下:
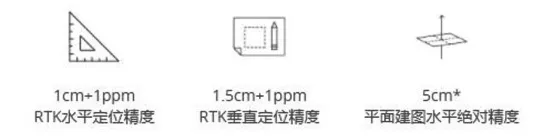
圖1 精靈Phantom 4 RTK定位精度
在無地面控制點的情況下,平面精度可達厘米級,高程精度可達米級,在有少量地面控制點的情況下平面精度和高程精度均可以達到厘米級。
2.無人機攝影測量檢測基樁偏位系統
根據樁位偏差檢測的具體要求,開發無人機攝影測量檢測基樁偏位系統可以更方便的進行數據的內業處理,無人機攝影測量檢測基樁偏位系統包含圖像數據導入、控制點數據導入、CAD數據導入、基樁坐標轉換、標注基樁、樁位偏差計算、結果輸出等功能,通過無人機實測的樁位與CAD圖上設計的樁位進行比對,然后計算得到樁位偏差,輸出結果。在無人機飛行攝影得到航攝相片后,使用無人機攝影測量檢測基樁偏位系統依次實現以下功能:
(1)導入DOM
由無人機得到的圖像經過處理之后生成DOM,將DOM導入無人機攝影測量檢測基樁偏位系統。
(2)導入控制點坐標
在CAD圖所在的坐標系下,導入至少3個已知控制點的坐標。
(3)在拍攝圖像上手動選擇控制點
在DOM上標注控制點的位置。
(4)自動計算CAD圖與DOM的轉換參數;
通過4參數模型計算轉換參數。
(5)導入CAD設計圖紙上的基樁信息
導入CAD設計圖紙上的基樁信息,包括名稱、坐標和半徑等,坐標系轉換為與DOM一致,然后與DOM圖疊加,用藍框顯示CAD設計圖紙上的基樁位置。
(6)識別基樁
在DOM上識別基樁,得到樁的實際坐標,用紅框表示。
(7)坐標對比
通過實際坐標與設計坐標進行對比,輸出基樁偏位質量評價報告。
3.樁位允許偏差
使用無人機進行樁位偏差檢測的前提是精度能夠達到檢測的要求,在本文中使用無人機進行樁位偏差檢測的主要是預制樁,《建筑地基基礎工程施工質量驗收標準》中預制樁(鋼樁)的樁位允許偏差如表1:
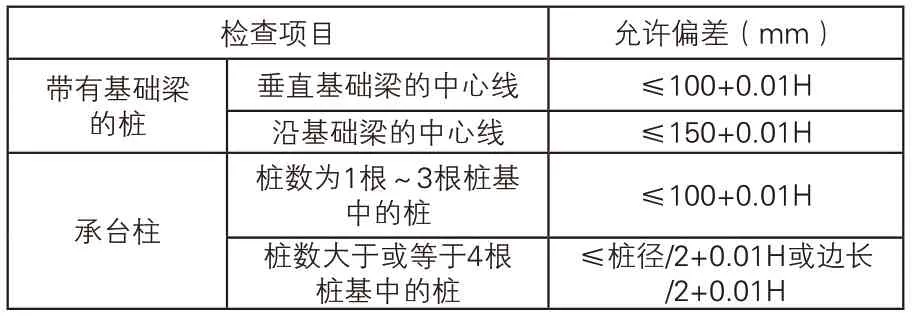
表1 預制樁(鋼樁)的樁位允許偏差
表1中H為樁基施工面至設計樁頂的距離(mm),D為設計樁徑(mm)。可以看到允許的偏差均大于10cm。
三、grabcut算法
1.算法原理
Graph Cut 算法把待分割圖像構建為一個無向網絡圖G(V,E)。V 是所有節點的集合,除了圖中每個像素外還有兩個終端節點:源點s(代表前景)和匯點t(代表背景) 。E 代表圖的邊集,由n-links和t-links 組成;n-links 是圖中每個像素之間的連接,t-links 是每個像素節點到終端節點的連接。nlinks和t-links 分別由不同的計算方式生成權值,從而構建能量函數; 然后再用最大流/最小割算法對網絡進行分割得到能量函數的最小值從而實現圖像的分割grabcut算法是在Graph Cut算法基礎上的改進和擴展;首先它改變原有Graph Cut算法需要手動標記前景區域和背景區域的方法為只需要在前景區域標注矩形框即可,大大降低了用戶交互的復雜性; 其次它采用高斯混合模型替代Graph Cut中的灰度直方圖模型來描述前景和背景像素的分布,從而實現了對彩色圖像的分割; 最后,使用迭代更新的方式代替原有一次分割方法,從而實現對所構建網絡圖能量函數的最小化獲得更高的分割精度,但由于GMM 參數和迭代更新的復雜性導致算法效率降低。grabcut用來分割的能量函數如下:

上式中α為透明度系數,為0是背景,為1是前景;k∈{ 1,2,…,K},K為GMM分量數目,通常取5;θ={ πk,uk,Σk}為每個GMM分量對應的比例、均值、協方差;E是能量函數,當E取最小值便得到最佳分割;U為區域項,用來衡量透明度系數α對于像素z的匹配程度,當所有像素被正確分類到前景或背景時取得最小值;V為邊界項,反映相鄰像素之間的相似性,在圖像的邊界處取得最小值。
2.基于grabcut改進的自動圖像分割
grabcut算法通過指定的矩形框對待分割圖像前景和背景區域中的像素進行劃分,再使用k-means算法對劃分后的兩類像素進行聚類來初始化GMM參數,從而得到網絡圖的初始權重。K-means算法的聚類結果將會決定像素屬于GMM中哪一個分量并影響最終分割結果。本文將基樁的坐標作為矩形框的中心,將直徑大小作為矩形框的長和寬,省去grabcut算法中人工繪制矩形框的交互過程。按照基樁編號、基樁坐標及半徑依次調用grabcut算法實現基樁自動分割識別。
grabcut在pythoncv庫中函數原型為grabcut(img, mask,rect,bgdModel,iterCount, mode=None)。其中img為待分割的圖像,在處理的過程中不會被修改。mask為掩碼圖像,如果使用掩碼進行初始化,那么mask保存初始化掩碼信息,在執行分割的時候,也可以將用戶交互所設定的前景與背景保存到mask中,然后再傳入grabcut函數,在處理結束之后,mask會保存結果。Mask只能取以下四個值:GCD_BGD(=0)表示為前景,GCD_FGD(=1)表示為背景,GCD_PR_BGD(=2)表示為可能的前景,GCD_PR_FGD表示為可能的背景。rect用于限定需要進行分割的圖像范圍,只有該矩形窗口內的圖像部分才被處理。bgdModel、fgdModel必須是單通道浮點型圖像,bgdModel表示背景模型,fgdModel表示前景模型。iterCount代表迭代次數,在本文中,迭代次數設置為10。mode用于指示grabcut函數進行什么操作,可選的值有GC_INIT_WITH_RECT(=0)表示用矩形框初始化grabcut,GC_INIT_WITH_MASK(=1)表示用掩碼圖像初始化grabcut,GC_EVAL(=2)表示執行分割,在本文中mode參數設置為1 ,用矩形框初始化grabcut。
四、實驗
為了驗證采用無人機結合grabcut識別算法能否滿足樁偏位檢測的需求,在某籃球場進行了樁偏位檢測實驗,在地上模擬了30cm、40cm和50cm等不同大小的樁位各十個,首先通過無人機獲取數據,飛行高度40m,地面分辨率約1.2cm,然后通過grabcut識別算法進行識別之后得到的結果如圖2:

圖2 樁偏位識別結果
圖2中藍色的是由全站儀得到樁位,紅框是grabcut識別算法得到的樁位,在現場建立臨時坐標系,以北方向為X軸,以東方向為Y軸,得到的樁位偏差值如表2:
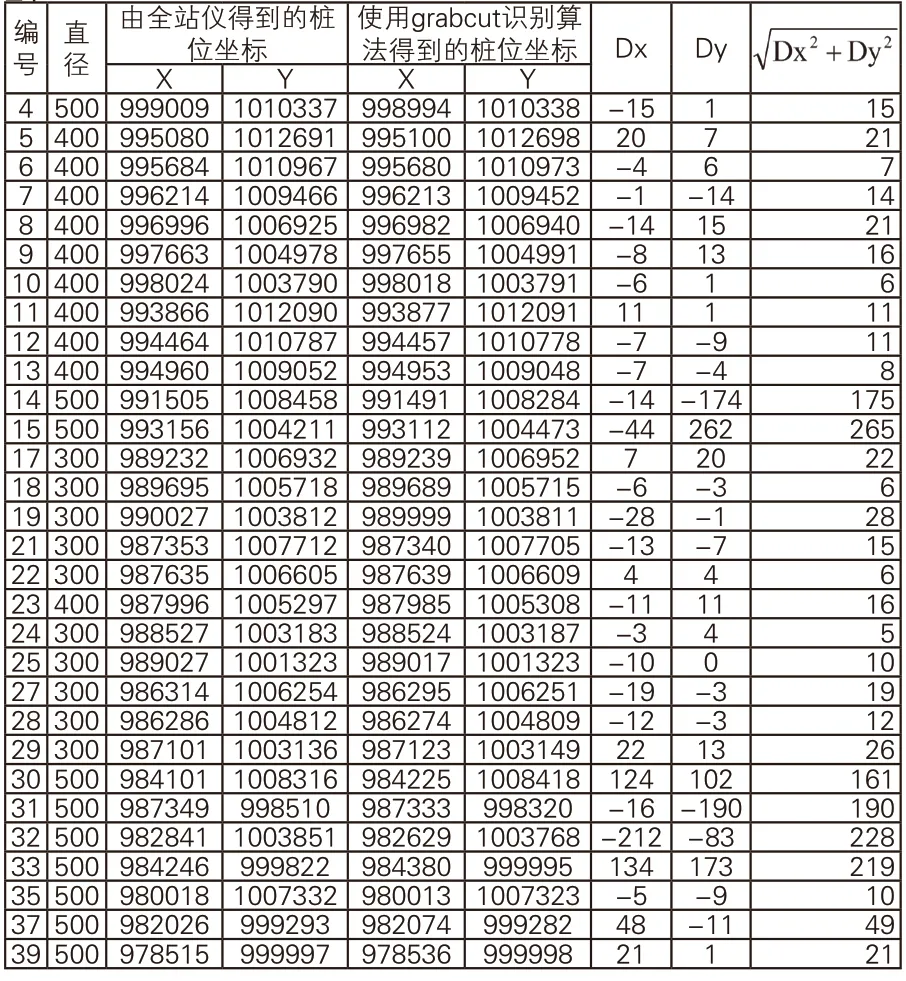
表2 樁位偏差值(單位:mm)
由表2可以看到通過全站儀得到的坐標與通過使用grabcut識別算法得到的樁位坐標總體上差別不大,樁位坐標距離小于10cm的點數達到80%。為了驗證使用grabcut識別算法進行自動識別的實用性和有效性,對某工程項目的樁位偏差檢測進行現場實驗,選取35根樁對樁位進行檢測,用于實驗的樁位事先通過常規方法檢測是符合驗收標準要求的,樁徑均為400mm,編號為35到69,飛行高度為120m,分辨率為3.28cm,得到的實驗結果如下:
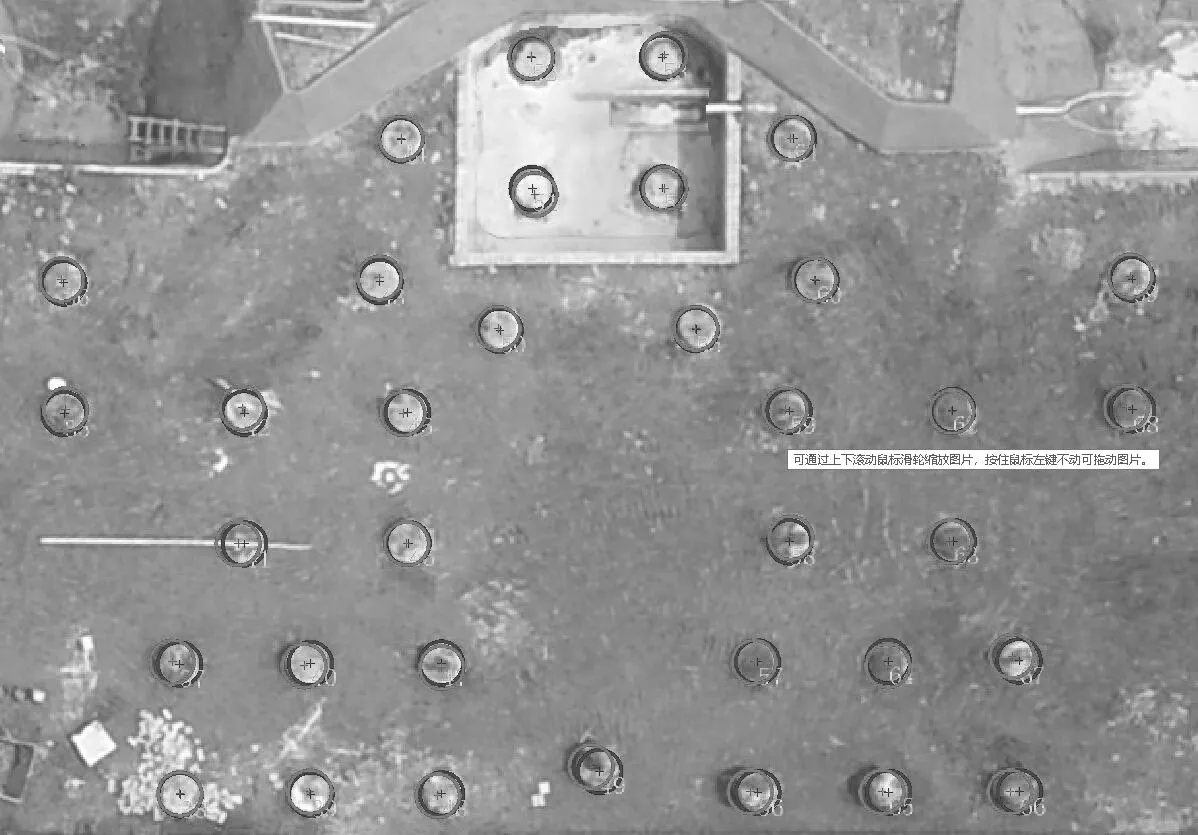
圖3 實驗結果
得到的檢測結果如表3:
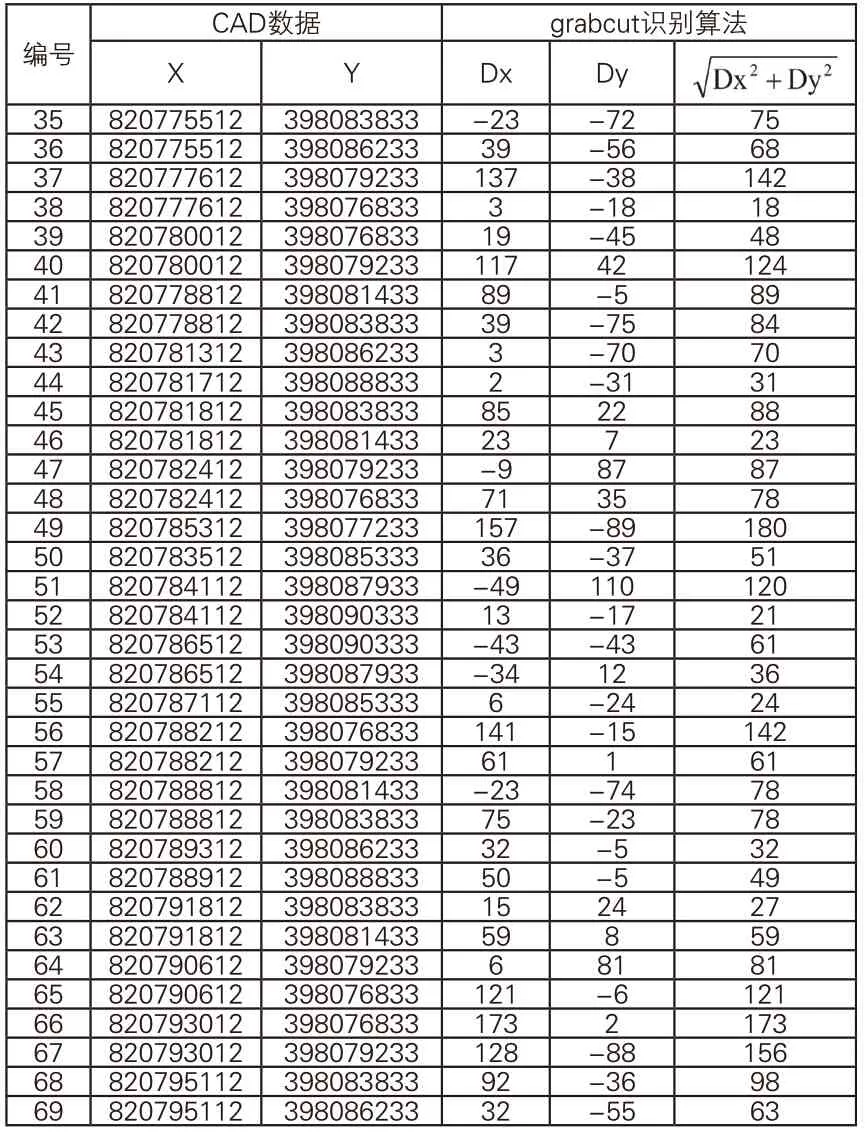
表3 樁位檢測成果表(單位:mm)
由表3可以看出通過grabcut識別算法得到的坐標與CAD圖上的坐標相差在2cm到18cm,35根樁中差距小于10cm的有27根,所占比率為77%。
五、結論
通過以上的實驗分析可以得到以下結論:
(1)通過grabcut識別算法得到的坐標不論是與全站儀得到的坐標相比,還是與設計坐標相比,相差小于10cm的數量均在77%以上。
(2)在不同的飛行高度下,通過grabcut識別算法得到的坐標偏差會有區別,飛行高度越低,坐標偏差越小。
(3)grabcut識別算法中不同的樁徑對識別的準確程度也有影響,實驗中對樁徑為400mm的識別準確度明顯要高于樁徑為500mm時的準確程度,同時不同的地面背景也會對識別的準確程度造成影響。
使用無人機進行樁位偏差檢測能減少外業工作量,通過grabcut識別算法能進一步減少內業的工作量,雖然還不能全部進行自動化識別,但本文提出的方法極大的提高了樁位偏差檢測效率,為快速高效的獲取樁位偏差信息提供了新的思路和途徑。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12