基于約束粒子群算法的網(wǎng)絡(luò)節(jié)點(diǎn)定位技術(shù)研究
2021-09-15 08:52:10謝宏飛
科學(xué)技術(shù)創(chuàng)新 2021年26期
謝宏飛
(湛江科技學(xué)院,廣東 湛江 524000)
現(xiàn)代網(wǎng)路通訊技術(shù)不斷發(fā)展,網(wǎng)絡(luò)通訊技術(shù)在數(shù)據(jù)監(jiān)測(cè)、環(huán)境保護(hù)工程甚至國(guó)防領(lǐng)域都在使用該技術(shù)。網(wǎng)絡(luò)節(jié)點(diǎn)的研究引起眾多國(guó)內(nèi)外學(xué)者的注意,網(wǎng)絡(luò)通訊技術(shù)是信息技術(shù)發(fā)展的重大變革,在網(wǎng)絡(luò)通訊技術(shù)中信息傳輸要包含信息傳遞的位置,對(duì)數(shù)據(jù)的感知才具有實(shí)際意義,因此網(wǎng)絡(luò)節(jié)點(diǎn)定位技術(shù)是網(wǎng)絡(luò)通訊技術(shù)的關(guān)鍵性技術(shù)[1]。
網(wǎng)絡(luò)節(jié)點(diǎn)定位技術(shù)的基本功能就是定位采集數(shù)據(jù)在坐標(biāo)系中的位置,這種技術(shù)在醫(yī)療領(lǐng)域中用來(lái)定位病人病變部位,在災(zāi)害監(jiān)測(cè)上的應(yīng)用結(jié)果就是可以定位到災(zāi)害發(fā)生的具體位置。因此,網(wǎng)絡(luò)節(jié)點(diǎn)定位技術(shù)的定位精度越高,在諸多領(lǐng)域中發(fā)揮的作用就越大[2]。
1 節(jié)點(diǎn)定位初始位置獲取
在網(wǎng)絡(luò)通訊傳播中,節(jié)點(diǎn)的位置需要依靠三個(gè)鄰近節(jié)點(diǎn)的錨節(jié)點(diǎn)進(jìn)行位置的確定。錨節(jié)點(diǎn)的跳數(shù)信息被節(jié)點(diǎn)接收一次之后就不會(huì)接收第二次。因此,通過(guò)這種方式獲取節(jié)點(diǎn)的初始定位的方法還是很靠譜的。初始位置不確定的節(jié)點(diǎn)在錨節(jié)點(diǎn)附近,測(cè)試與錨節(jié)點(diǎn)只會(huì)按實(shí)際距離,負(fù)責(zé)測(cè)量的錨節(jié)點(diǎn)數(shù)量大于3個(gè),基本就可以確定節(jié)點(diǎn)的大概位置[3]。
首先設(shè)定三個(gè)節(jié)點(diǎn)的坐標(biāo):錨節(jié)點(diǎn)1坐標(biāo)為(X1,Y1),錨節(jié)點(diǎn)2坐標(biāo)為(X2,Y2),錨節(jié)點(diǎn)3坐標(biāo)為(X3,Y3)。需要定位的節(jié)點(diǎn)T的坐標(biāo)為(XT,YT),可以得到公式:
上述公式中字母d代表三個(gè)錨節(jié)點(diǎn)坐標(biāo)到節(jié)點(diǎn)的距離,取節(jié)T上方的兩個(gè)錨節(jié)點(diǎn),錨節(jié)點(diǎn)1和錨節(jié)點(diǎn)2,以兩個(gè)錨節(jié)點(diǎn)的坐標(biāo)點(diǎn)為圓心,節(jié)點(diǎn)通信的距離r為半徑畫兩個(gè)圓,基于通信的距離r必然大于錨節(jié)點(diǎn)的原理,兩個(gè)圓會(huì)有交叉的部分,在兩圓交接的地方進(jìn)行采樣,采樣的坐標(biāo)為初始位置的坐標(biāo),兩圓心距離為2r,采樣的門限設(shè)置為n[4]。節(jié)點(diǎn)與錨節(jié)點(diǎn)之間的距離為:

上述公式中,U1和U2是兩個(gè)圓的圓心,D為圓心與位置加點(diǎn)之間的距離,V是規(guī)定的最大誤差。剩余的錨節(jié)點(diǎn)的坐標(biāo)為(X3,Y3),延續(xù)上述方法,以此坐標(biāo)為圓心,通信距離的2倍為半徑畫圓,與節(jié)點(diǎn)圓的相交的陰影部分進(jìn)行位置節(jié)點(diǎn)的采樣,最終確定節(jié)點(diǎn)定位初始位置[5]。
2 約束粒子群初始化
約束主導(dǎo)粒子的目標(biāo)函數(shù)中的函數(shù)結(jié)果分為可行結(jié)果和不可行結(jié)果。基于兩個(gè)函數(shù)結(jié)果定義約束粒子群的算法原理,函數(shù)的結(jié)果有三種情況,第一種情況為兩個(gè)結(jié)果都是不可行結(jié)果,但是其中一個(gè)結(jié)果的值小于另一個(gè)結(jié)果,兩個(gè)結(jié)果都是可行結(jié)果,但是結(jié)果1的適應(yīng)性比結(jié)果2更好。最后一種情況為兩個(gè)結(jié)果剛好一個(gè)可行一個(gè)不可行,只取可行結(jié)果就好。函數(shù)的第一個(gè)結(jié)果定義為a1,第二個(gè)結(jié)果定義為a2。則a1結(jié)果的特征可以主導(dǎo)a2,函數(shù)兩個(gè)解之間可行程度和不可信程度的對(duì)比,需要用到以下模型:

公式(3)中,g(a1)為關(guān)于算法函數(shù)結(jié)果a1的不等式約束公式,h(a1)為關(guān)于算法函數(shù)結(jié)果a1的等式約束公式。J為不等式的約束數(shù)量,n為等式的約束數(shù)量。函數(shù)結(jié)果a2的判斷方式同上,為了利用約束粒子群算法進(jìn)行節(jié)點(diǎn)定位創(chuàng)造可行域空間,使用定位突跳的定位機(jī)制,定位機(jī)制采用模擬概率理論最為理論支撐。在可行域值空間中隨機(jī)選取的數(shù)值放到不可行域中都不會(huì)被接受,說(shuō)明兩部分域的范圍劃分正確。
只有可行域和不可行域的范圍劃分是正確的,約束粒子群的規(guī)模才不會(huì)發(fā)生變化,在粒子群中,飛行粒子的飛行速度較高。文獻(xiàn)中提到的算法的飛行粒子的運(yùn)動(dòng)速度都很低,在搜索最優(yōu)解的時(shí)候進(jìn)程會(huì)很慢,約束粒子群函數(shù)的可行解會(huì)隨機(jī)產(chǎn)生可帶入算法的變量,編碼形式采用傳統(tǒng)的二進(jìn)制編碼,需要定位的時(shí)段有100個(gè)節(jié)點(diǎn),最后一個(gè)節(jié)點(diǎn)的坐標(biāo)可以設(shè)為(x100,y100)其他節(jié)點(diǎn)的坐標(biāo)以此類推,基于第一步節(jié)點(diǎn)定位初始位置的坐標(biāo)計(jì)算出約束粒子群算法函數(shù)的最優(yōu)解,完成約束粒子群初始化。
3 基于算法交叉率獲取節(jié)點(diǎn)定位最優(yōu)解
基于算法函數(shù)結(jié)果的可行解適應(yīng)度,進(jìn)行算子的選取,集中變量在適應(yīng)度值單位內(nèi)的算法環(huán)境中進(jìn)行變量淘汰,剩余的優(yōu)質(zhì)變量繼續(xù)參與定位工作。選取群體中的兩個(gè)優(yōu)質(zhì)變量進(jìn)行約束粒子交換,交叉概率為P,優(yōu)質(zhì)變量結(jié)合后交叉概率越大,說(shuō)明約束粒子群的定位精準(zhǔn)度越高,優(yōu)質(zhì)變量結(jié)合后交叉概率越小,說(shuō)明約束粒子群的定位精準(zhǔn)度越低。需要進(jìn)行實(shí)驗(yàn)驗(yàn)證變量的交換概率,當(dāng)P的概率大于百分之五十,粒子重組,優(yōu)質(zhì)變量A的編碼為:0001110101111000,優(yōu)質(zhì)變量B的編碼為:0101110101111011新個(gè)體的編碼A1為:1000010101111011,新個(gè)體的編碼B1為:1000010101111000。A1、B1與A、B的契合度也高于百分之五十。基于上述條件,在傳感器中隨機(jī)產(chǎn)生N個(gè)節(jié)點(diǎn),M個(gè)錨節(jié)點(diǎn)。基于上述交叉率進(jìn)行采樣組成粒子組群,約束粒子群已經(jīng)做到了組群初始化,在初始化環(huán)境中可以直接計(jì)算采樣點(diǎn)中的粒子的適度性,并記錄適度性最好的錨節(jié)點(diǎn)坐標(biāo),粒子的適應(yīng)度值高的在產(chǎn)生個(gè)體時(shí)被選中的概率也隨之變高。記錄每個(gè)約束粒子的最佳適度性數(shù)據(jù),目標(biāo)值小于最佳適度性數(shù)據(jù)將會(huì)進(jìn)入最優(yōu)解計(jì)算迭代,直到計(jì)算出最優(yōu)解,才可以確定節(jié)點(diǎn)的最終定位。
4 模擬實(shí)驗(yàn)
為了驗(yàn)證本文基于約束粒子群算法改進(jìn)的網(wǎng)絡(luò)節(jié)點(diǎn)定位技術(shù)與傳統(tǒng)方式比較是否都具有優(yōu)勢(shì)。進(jìn)行模擬測(cè)試實(shí)驗(yàn),對(duì)比該技術(shù)與傳統(tǒng)技術(shù)相比,噪聲的標(biāo)準(zhǔn)方差的對(duì)比,在定位測(cè)試中噪聲的標(biāo)準(zhǔn)方差越大說(shuō)明在定位中受到的干擾越多,定位的精度就越不準(zhǔn)確。
4.1 實(shí)驗(yàn)準(zhǔn)備
設(shè)置模擬測(cè)試環(huán)境為室內(nèi)環(huán)境,在模擬環(huán)境中設(shè)置兩個(gè)障礙物,命名為障礙物A和障礙物B。兩個(gè)障礙物之間的間距不宜過(guò)短,大小和重量也要設(shè)置成不同規(guī)格。信號(hào)發(fā)射器在室內(nèi)左上角最邊緣處,信號(hào)接收機(jī)和信號(hào)發(fā)射機(jī)之間保證信號(hào)發(fā)射路徑會(huì)路過(guò)兩個(gè)設(shè)置好的障礙物。
實(shí)驗(yàn)分別在四種實(shí)驗(yàn)條件下進(jìn)行,模擬實(shí)驗(yàn)條件信息如下:1號(hào)場(chǎng)景為13*10*6,障礙物為0;2號(hào)場(chǎng)景為20*12*6.2,障礙物為1;3號(hào)場(chǎng)景為25*13*6.5,障礙物為2;4號(hào)場(chǎng)景為30*15*7,障礙物為2。
四種場(chǎng)景室內(nèi)環(huán)境的長(zhǎng)、寬、高是逐漸增長(zhǎng)的。在模擬場(chǎng)景1中,室內(nèi)環(huán)境的長(zhǎng)高寬數(shù)值設(shè)置都較小,室內(nèi)環(huán)境的構(gòu)造較小。信號(hào)發(fā)射和信號(hào)接收之間未設(shè)置障礙物,信號(hào)發(fā)射距離也較短。模擬場(chǎng)景2中設(shè)置1和障礙物,模擬場(chǎng)景3和4中都設(shè)置2個(gè)障礙物,在每個(gè)場(chǎng)景中都需要收集30個(gè)隨機(jī)數(shù)據(jù)。測(cè)試的距離值設(shè)定為間距0.05 m以上,這樣即使在面積最小的模擬場(chǎng)景1中也能保證收集數(shù)據(jù)的預(yù)留位置在80個(gè)以上。距離值隨著測(cè)試次數(shù)增加。隨著數(shù)據(jù)采集的進(jìn)行,算法計(jì)算原始參數(shù)數(shù)據(jù),隨著障礙物對(duì)信號(hào)的干擾,參數(shù)開(kāi)始發(fā)生變化。
4.2 實(shí)驗(yàn)結(jié)果與分析
基于上述實(shí)驗(yàn)環(huán)境對(duì)比該技術(shù)與傳統(tǒng)方法相比,信號(hào)傳播中噪聲的標(biāo)準(zhǔn)方差,結(jié)果如下圖所示:
由圖1可以看出,本文設(shè)計(jì)的方法的定位精度更高,定位結(jié)果受到的干擾更小。
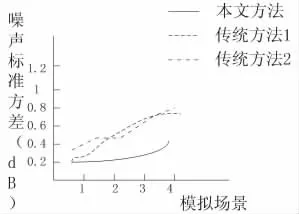
圖1 四種模擬場(chǎng)景標(biāo)準(zhǔn)差對(duì)比曲線
基于上述實(shí)驗(yàn)環(huán)境,對(duì)比傳統(tǒng)算法和本文選用的約束粒子群算法所用的時(shí)間開(kāi)銷,實(shí)驗(yàn)結(jié)果如表1所示:
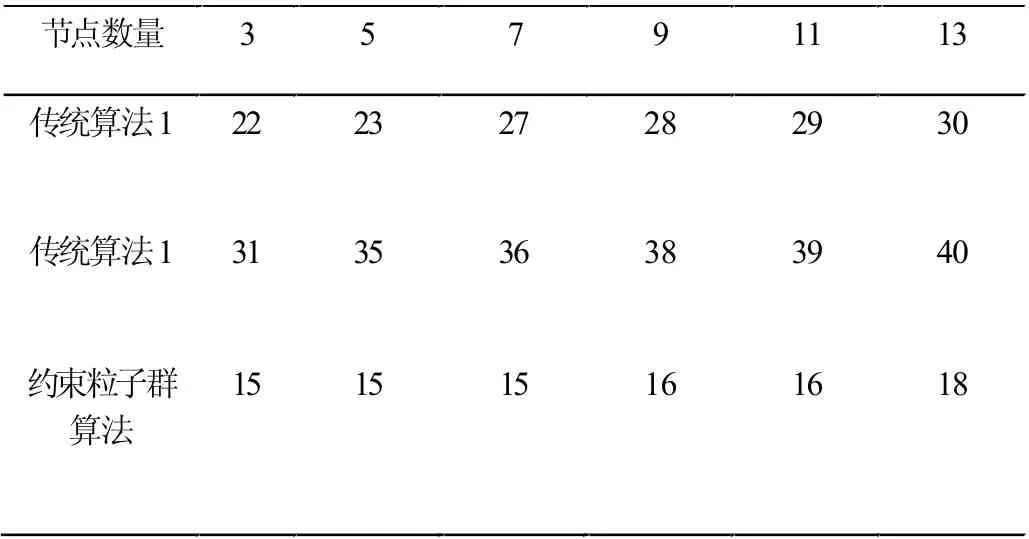
表1 定位過(guò)程的時(shí)間開(kāi)銷對(duì)比/ms
由上表所知,傳統(tǒng)方式所選用的算法的時(shí)間開(kāi)銷隨著節(jié)點(diǎn)數(shù)量的增多在不斷延長(zhǎng),傳統(tǒng)算法2點(diǎn)位13個(gè)節(jié)點(diǎn)所用的時(shí)間竟然達(dá)到了40ms,在實(shí)際的通訊過(guò)程中,節(jié)點(diǎn)數(shù)量較多,且本實(shí)驗(yàn)的實(shí)驗(yàn)環(huán)境在室內(nèi),障礙物只有兩個(gè)。與實(shí)際狀況相比,環(huán)境已經(jīng)優(yōu)化了不少。約束粒子群算法的時(shí)間開(kāi)銷穩(wěn)定在20ms之內(nèi),在時(shí)間開(kāi)銷上遠(yuǎn)勝于傳統(tǒng)算法。因此基于約束粒子群算法網(wǎng)絡(luò)節(jié)點(diǎn)定位技術(shù)比傳統(tǒng)技術(shù)更加節(jié)省點(diǎn)位時(shí)間。
結(jié)束語(yǔ)
本文基于約束粒子群算法改良傳統(tǒng)的網(wǎng)絡(luò)節(jié)點(diǎn)定位技術(shù),基于約束粒子群算法的路徑損耗和算法精度使改良過(guò)后的定位技術(shù)更加精準(zhǔn),但本問(wèn)設(shè)計(jì)的方法對(duì)減弱環(huán)境噪聲這一技術(shù)難題研究的還不夠透徹,希望日后的研究中可以突破這一技術(shù)難關(guān)。
 科學(xué)技術(shù)創(chuàng)新2021年26期
科學(xué)技術(shù)創(chuàng)新2021年26期
- 科學(xué)技術(shù)創(chuàng)新的其它文章
- 科技是國(guó)家強(qiáng)盛之基創(chuàng)新是民族進(jìn)步之魂
- 校園二手物品交易網(wǎng)站的設(shè)計(jì)與實(shí)現(xiàn)
- 基于機(jī)器學(xué)習(xí)的線上評(píng)論情感分類研究
- 多級(jí)安全中范疇優(yōu)化算法研究
- 基于MATLAB的圖像分割算法研究及實(shí)現(xiàn)
- 無(wú)人機(jī)傾斜攝影測(cè)量在農(nóng)村不動(dòng)產(chǎn)調(diào)查中的應(yīng)用
——以蘭溪市農(nóng)村宅基地及住房權(quán)籍調(diào)查為例