無人機在入河排污口排查中的應用研究
2021-09-15 02:43:30劉俊逸屈銘志
科技視界 2021年23期
劉俊逸 屈銘志
(上海建科環境技術有限公司,上海200032)
0 引言
2018年,習近平總書記關于長江經濟帶發展“共抓大保護、不搞大開發”的重要指示,要求全面推進長江入河排污口排查整治工作。需要全面摸清入河排污口情況、掌握其分布規律及存在的突出問題,為全面開展排污口整治工作夯實基礎。
傳統的入河排污口排查,主要依賴于人工巡查,對于工作人員工作經驗和責任心要求較高,很容易“走過,路過,錯過”;另一方面,入河排污口周邊環境復雜,存在大量的無法觀察區域。近年來,無人機這一新技術具備了小巧攜帶的特點,且能快速拍攝人工無法進入的區域,被廣泛地應用在環境執法和取證中[1]。針對入河排污口的現場排查,無人機航拍也作為了推薦的技術手段之一。但目前該技術在河道排污口調查中的應用仍有一定局限[2],常見的問題包括:(1)排口較為隱蔽,無人機選型不合適導致無法采集數據;(2)由于無人機是從空中觀察,很難獲得觀察排口的最佳角度,排查的數據質量和信息獲取存在不足;(3)由于河道彎曲,飛行路線依靠人為判斷,數據的完整性不能得到保障。
本研究立足上述痛點,探索無人機在入河排污口排查中的應用,主要從三方面進行研究:無人機設備選型、數據獲取方法及無人機自動化數據采集,從而實現入河排污口的高效精準摸排。
1 無人機的選型
在入河排污口排查過程中,河道處于山谷、農村郊區等復雜環境、無人機技術的使用需滿足安全作業的相關要求。但另一方面,河道及兩岸的環境類型復雜多樣,河岸兩側樹木、房屋等障礙物較多,許多地區車輛無法進入,需要考慮設備攜帶的便捷性。
目前常見的無人機按照類型,可分為多旋翼無人機、固定翼無人機及混合翼無人機;按照尺寸,可分為微型、輕型、小型、中型、大型無人機;按使用的傳感器分類,可分為可見光傳感器、熱紅外傳感器和激光雷達傳感器。
各類型無人機的性能對比如表1所示。從成本、起飛空間、操作性及飛行速度等方面綜合考慮,入河排污口的排查一般使用多旋翼無人機。原因如下:(1)多旋翼無人機成本較低且操作簡單;(2)入河排污口排查現場空間有限,因此起飛空間僅需要一小塊空地的多旋翼無人比較合適;(3)由于多旋翼無人機具備較慢的飛行速度,可以對排污口細節和排污狀態進行長時間多角度的觀察辨認。
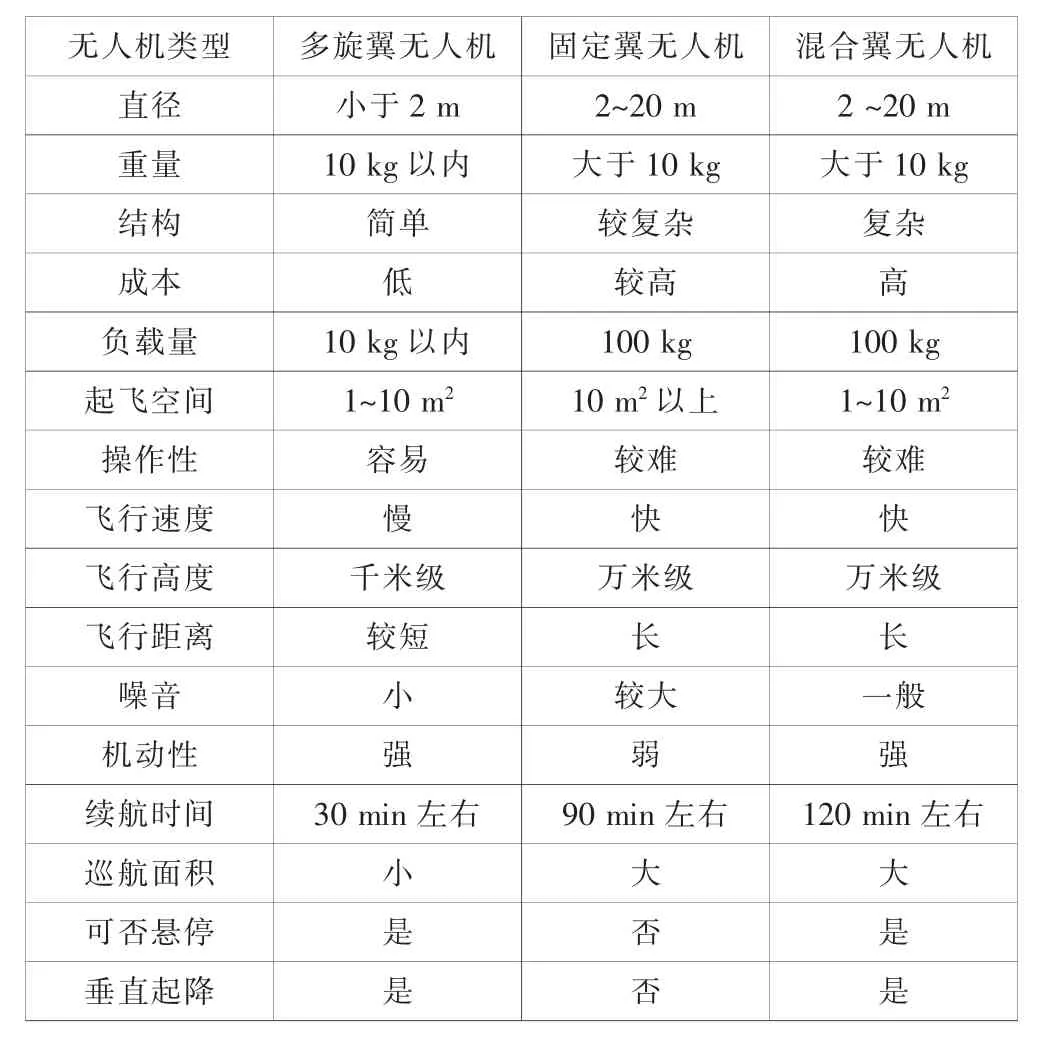
表1 無人機類型分類表
各尺寸無人機的性能對比如表2所示,根據《無人駕駛航空器飛行管理暫行條例(征求意見稿)》,按照運行風險的大小,以及中國民用航空局《輕小無人機運行規定(試行)》,無人機運行管理分類,民用無人機分為微型、輕型、小型、中型、大型。在入河排污口排查的同坐通常范圍區域較大,很難提前協調空域申請,而飛行高度通常只需要在120米以下,因此,在入河排污口巡查過程中,一般選擇起飛全重為0.25~7 kg的微小型無人機,可以依據相關法律法規簡單報備,并且具有較好的抗風能力,同時機體尺寸較小,靈活度強,能適應各種復雜環境,避免被樹木等周邊環境障礙所困。
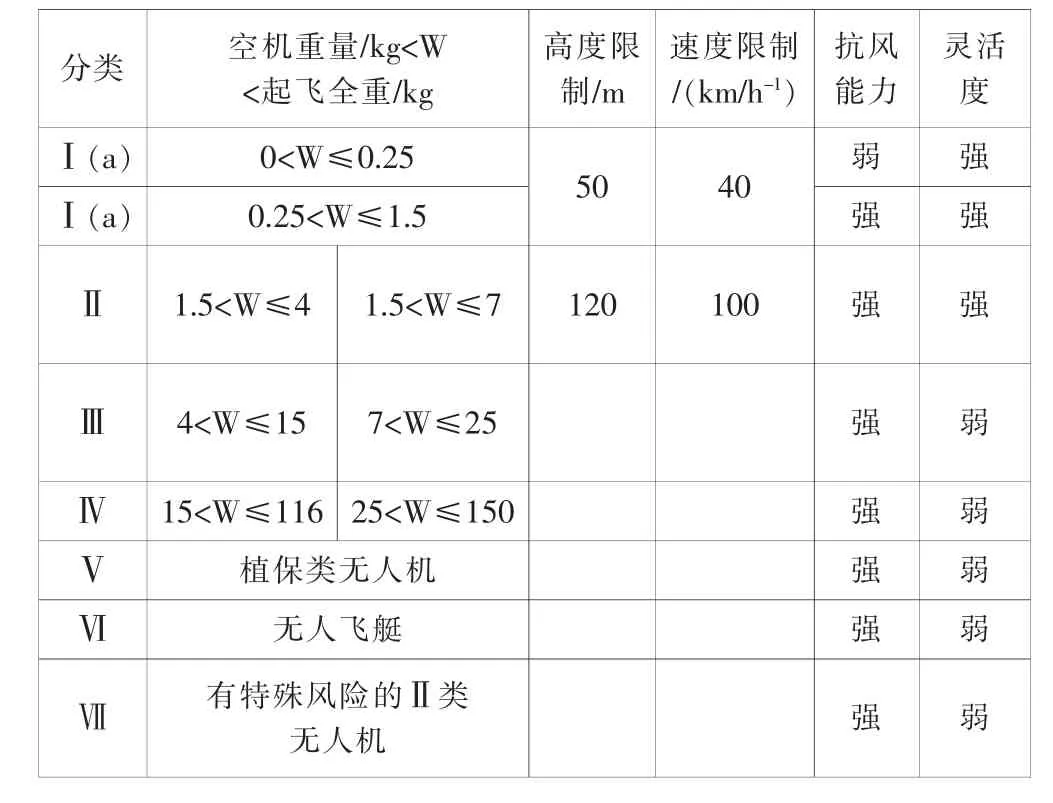
表2 無人機尺寸分類表
目前在入河排污口排查中主要應用的傳感器有可見光傳感器、熱紅外傳感器和激光雷達。見表3各類傳感器可以發揮不同的作用。通過不同類型傳感器的組合應用,能夠發揮無人機的最大排查功能。
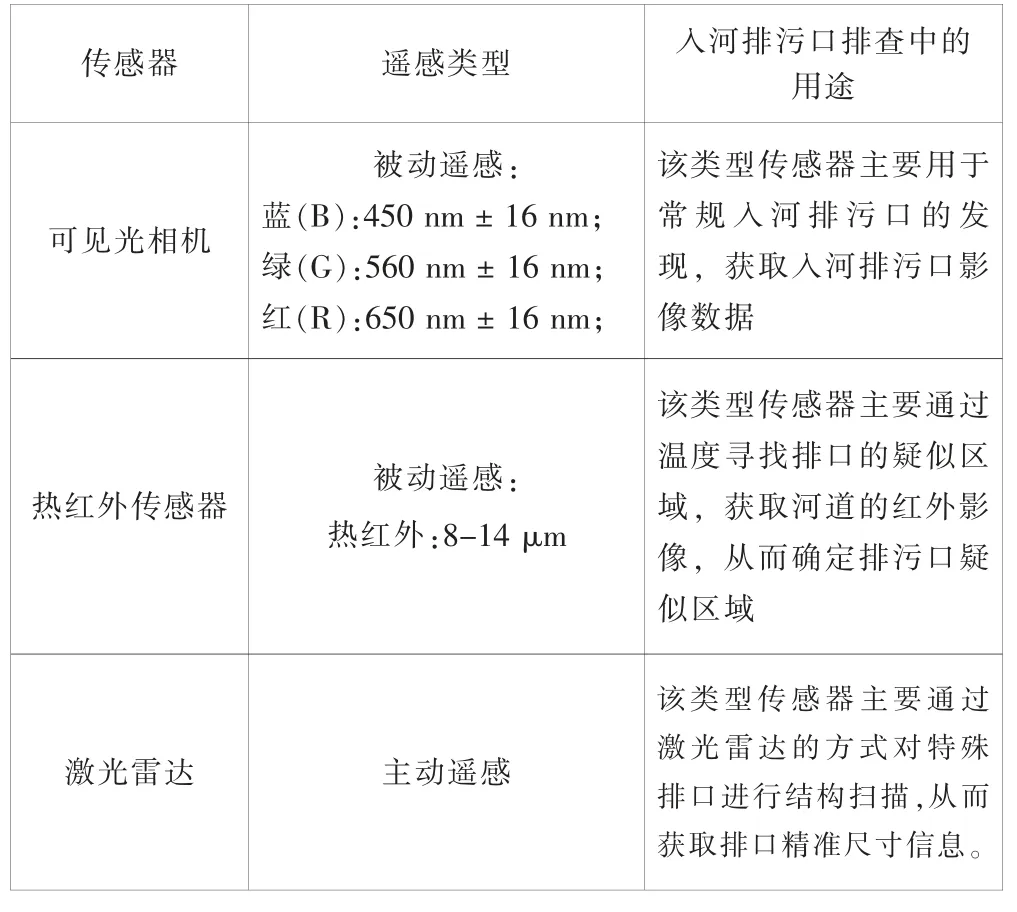
表3 無人機傳感器分類表
2 無人機數據獲取方法
2.1 無人機傾斜影像
無人機傾斜影像是利用微小型無人機,與河道堤岸呈現一定的傾斜角度進行照片拍攝,內業人員通過觀察傾斜影像獲取入河排污口信息。
傾斜影像具備以下特點:
(1)傾斜影像具備精準的經緯度定位信息,可以通過GIS平臺查看影像拍攝位置,從而獲取入河排污口精準位置信息;
(2)通過傾斜視角既可以看到入河排污口形狀,又能夠觀察到排口的立體結構;
(3)傾斜影像對于直立式駁岸和傾斜的駁岸均可以對入河排污口有較好的排查效果;
(4)傾斜影像可以拍攝近景、遠景影像,通過不同的視野照片對入河排污口進行綜合分析,不僅為排口的排查工作,同時也為排口的溯源工作提供有力支撐。
因此選用傾斜影像獲取入河排污口。如圖1所示。
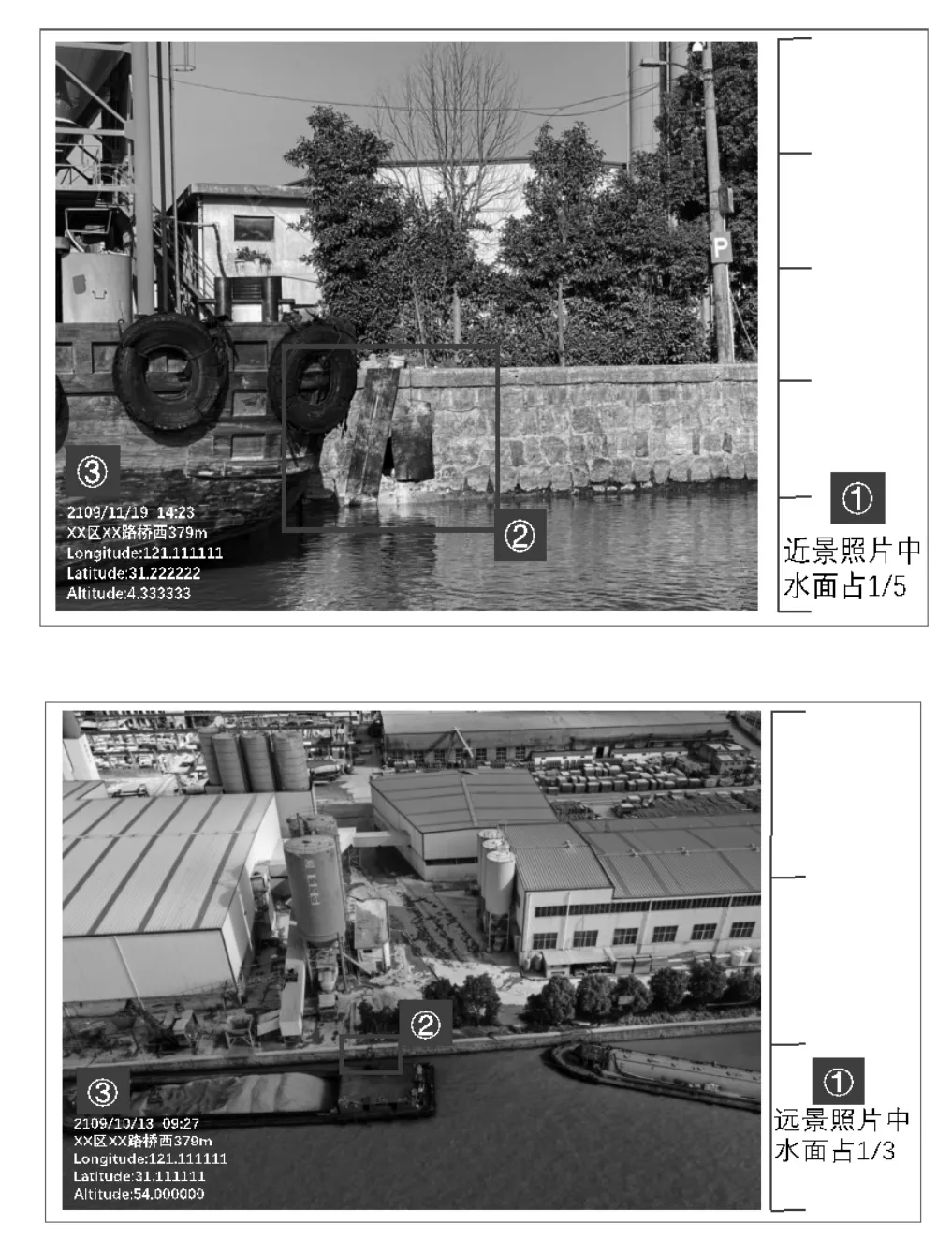
圖1 無人機傾斜影像在入河排污口排查中的應用
通過對傾斜影像的分析,可以總結出傾斜影像拍攝技術的使用條件及適用邊界;該技術能夠短時間獲取河道兩岸堤岸的完整數據,適用于大范圍的排放口排查;采用人工操縱的方式,可獲取堤岸兩側近景遠景照片,適用于小范圍排放口的精細化排查監測,該技術的應用可實現:
(1)通過走航拍攝,識別河道兩岸各類水面以上隱藏排放口;
(2)通過近景照片獲取排放口精確定位、尺寸、與堤岸的相互關系;
(3)通過遠景照片獲取排放口與防汛擋墻之間的關系以及周邊疑似排放單位的信息;
(4)通過機載GPS信息或照片上的GPS定位信息,結合高精度正射影像,判斷排放口大概位置(粗略經緯度信息)。
2.2 無人機正射影像
無人機正射影像是通過無人機鏡頭與地面垂直(即云臺俯仰角為-90°)進行數據獲取的一種方式。通過正攝影像可以了解到排口與污染源之間的關系,可用于測量及入河排污口的精準定位如圖2所示。通過正射影像,還可以與已有的管網圖等各類資料疊加,從而進行排口的溯源排查工作。
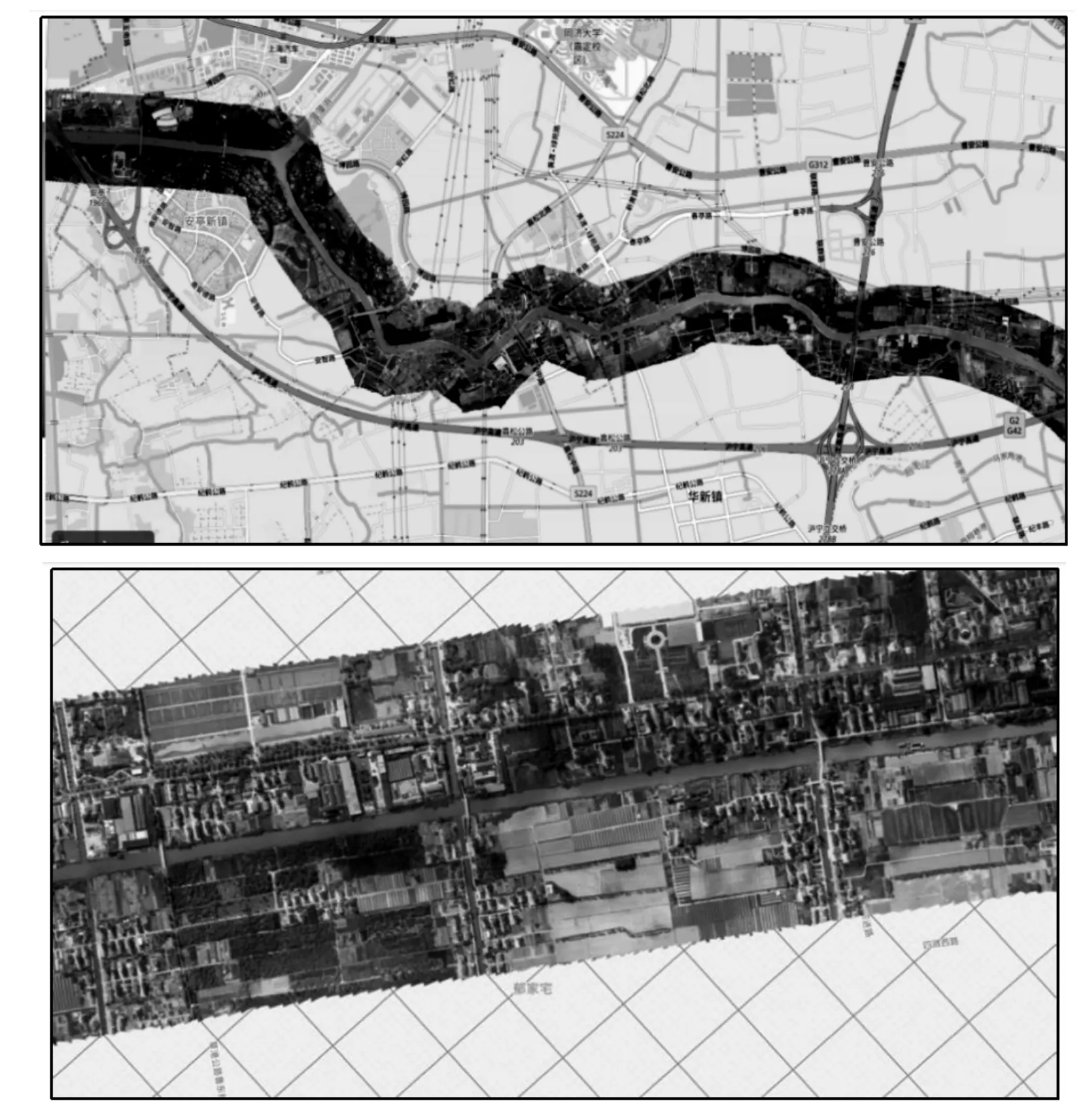
圖2 范例影像:基于無人機的正射影像獲取技術生成的正射影像
通過對傾斜影像的分析,可以總結出傾斜影像拍攝技術的使用條件及適用邊界:該技術可獲得最高2 cm分辨率的局部區域正射影像,用于彌補航空器/衛星光學遙感對中小河道基礎信息支撐的不足,針對不同類型的河道,可根據河道寬度,分辨率需求,預先規劃航線開展任務。同時,該技術適用于大范圍的排放口初篩掃描監測任務,可實現:
(1)通過影像直接發現明渠,泵站,涵閘類排水口;
(2)通過水流特征、水漬線發現可疑的水下排放口;
(3)根據兩岸圖例利用特征尋找出排放口的熱點區域;
(4)如無人機設備具備RTK/PPK功能,可獲取高精度定位數據的正射影像,用于排放口定位輔助;
針對堤岸改造等環境特征快速變化的區域,可定期更新數據,了解排放口的狀態變更。
3 無人機數據自動化采集
通過無人機飛行廠商提供的SDK開發界面,結合第三方軟件的應用,進行二次開發,能夠實現基于航線規劃的自動化飛行。以目視解譯的數據質量要求進行坐標、高度、云臺俯仰角度,飛行速度的分析。根據不同的河道寬度和駁岸的結構特點,開展線路的優化,形成了一張普通技術人員都能根據現場河道情況進行規劃的線路編輯速查表。
以某案例的實際測試數據,如圖3所示。結果表明采用無人機自動化巡查的飛行效率(7~10 km/d)是飛手手動飛行巡查(4~5 km/d)效率的2倍以上,是人工巡查(2 km/d)效率的3~5倍。通過該方法,形成完整連續的影像,能夠避免入河排污口排查遺漏,通過多次自動化飛行,可以獲取同一位置的不同時間的影像,在水位變換較大的河道,可以通過多次獲取的影像進行比較。該方法為內業工作查找疑似排口及排口的定位提供,節約了后續工作的時間和效率。該方法充分利用無人機的空間角度優勢,實現入河排污口排查的水平全覆蓋,不遺漏排口,對入河排污口可以做到應查盡查。
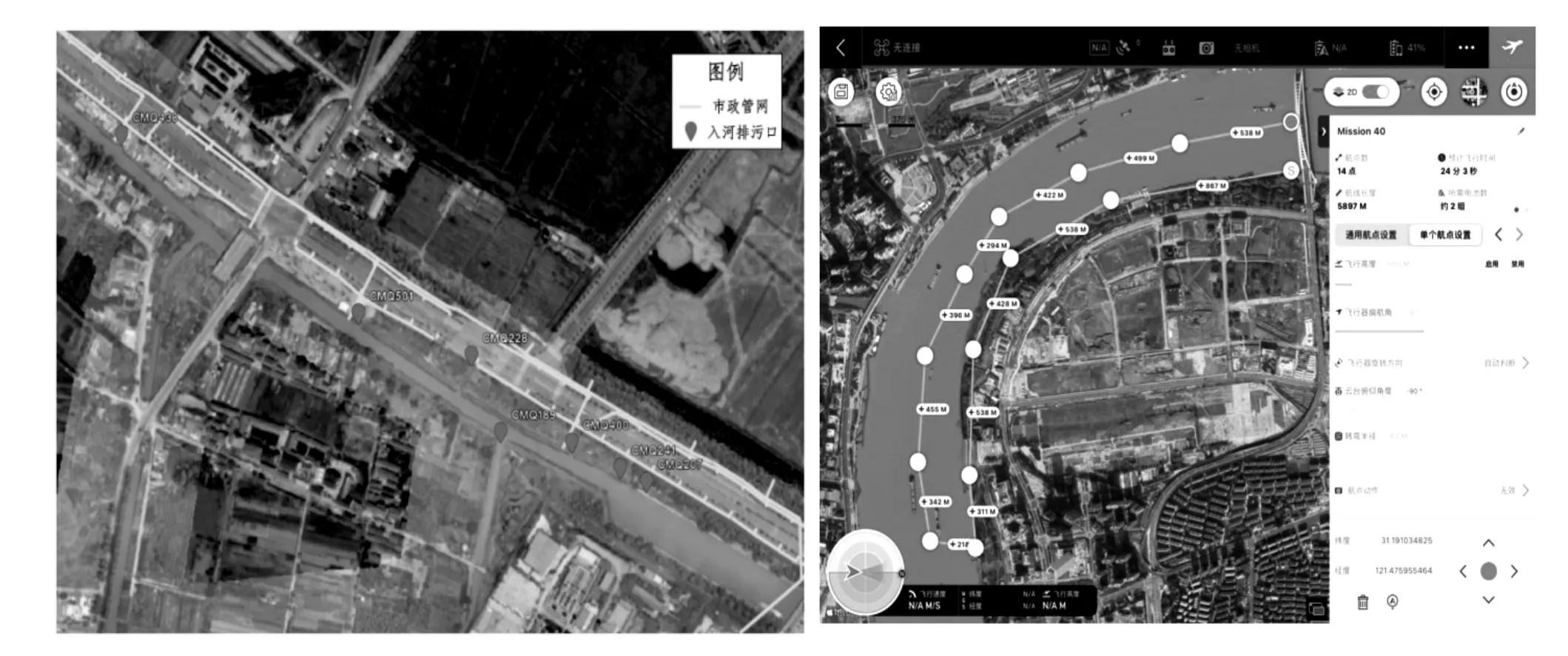
圖3 無人機正射影像疊加市政管網圖與入河排污口位置信息
4 結論
通過對比及測試研究,無人機在入河排污口排查中,設備的最佳選型為多旋翼輕微型無人機,同時可以搭載多種傳感器。入河排污口數據獲取主要通過無人機獲取正射影像及傾斜影像,通過無人機自動化飛行技術可以提高排查效率,實現入河排污口排查的水平全覆蓋,不遺漏排口,對入河排污口可以做到應查盡查。
