基于BP神經網絡的厘米級超寬帶測距誤差改正模型設計與實驗
2021-09-14 09:30:22肖庭楊章迪
全球定位系統 2021年4期
關鍵詞:模型
肖庭楊,章迪
( 武漢大學測繪學院,武漢 430079 )
0 引言
超寬帶(UWB)是一種采用極低功率譜密度和極窄脈沖寬度的無線通信和定位技術,具有穿透能力強、傳輸速率快和時間分辨率高等優點[1],理論上可以實現cm 級的測距定位. 但由于室內環境復雜,UWB定位受多路徑等非視距誤差影響較大,這類誤差成為制約其定位精度的主要因素.
為提高UWB測距精度國內外學者展開了多方面的研究.文獻[2]引入最小二乘殘差法對粗差觀測數據進行剔除,但不能有效地處理系統誤差;文獻[3]分析了UWB非視距誤差的特性,提出了滑動窗口識別、動態調整噪聲參數的卡爾曼濾波算法進行誤差補償,但單獨改正效果不顯著,需要函數擬合等方法進行進一步改正系統性誤差;文獻[4-6]利用多項式函數、指數函數等對測距誤差進行建模,只考慮了測距誤差和測距值之間的相關性;文獻[7-10]從信號波形、信號接收強度、量測接收信號的隨機性等方面出發,利用小波神經網絡、支持向量機等機器學習方法估計測距誤差,模型較為復雜;文獻[12-14]將UWB與慣性傳感器進行組合以削弱非視距誤差的影響,需要額外的硬件支持,增加了算法復雜度;文獻[11]提出一種神經網絡改正模型,將測距值分解為兩個分量作為模型輸入但忽略了高程改正.
綜上所述,現有的UWB 誤差改正方法還存在應用范圍較窄、改正精度有限和模型過于復雜等問題.基于此,本文建立了適用于三維空間的UWB測距誤差BP神經網絡改正模型,并且分析比較了兩種不同網絡結構的模型改正效果.
1 實驗原理
1.1 BP神經網絡模型
人工神經網絡由輸入層、輸出層和至少一個隱藏層組成,每一層至少由一個神經元組成.BP神經網絡能在輸入和輸出端建立一種非線性的映射關系,算法步驟如圖1所示.

圖1 BP神經網絡算法流程圖
1.2 最小二乘定位算法
2 精度評定
2.1 測距精度評定
以測距誤差均值和均方根誤差(RMSE)評定測距精度,計算方法如式(3)、(4)所示:
2.2 定位精度評定
選取RMSE評定X、Y、Z方向定位精度,如式(5)~(7)所示:

3 實驗方案
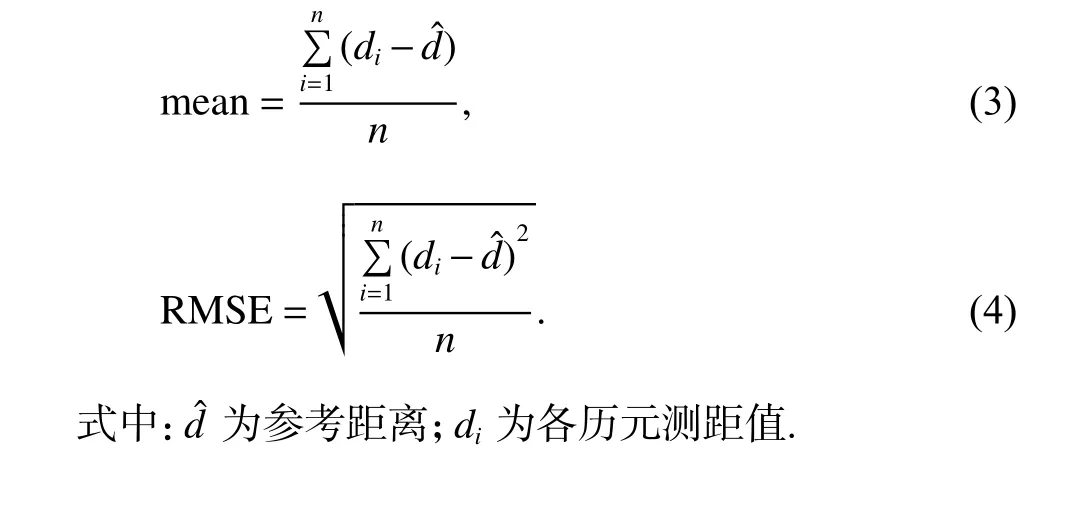
3.1 實驗設備
實驗設備如圖2所示,UWB 設備采用DecaWave公司的DecaWavePG1.5 套件;全站儀使用Leica MS50,測角精度為1″,測距精度為0.6 mm+1×10?6.
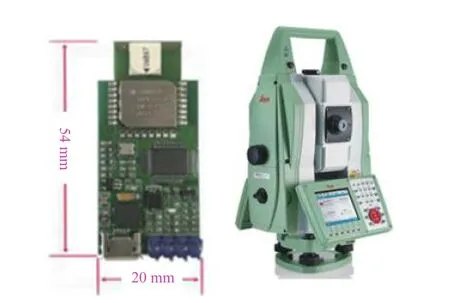
圖2 實驗硬件設備
3.2 實驗場地
實驗地點位于8 m×12 m 的室內場地,在4個墻面上各設置1個基站,在地面設置一系列網格點,包括1 個長時間測距點、42個采樣點和5個檢核點,如圖3所示.長時間測距點用于測試測距的穩定性,采樣點用于參與BP神經網絡訓練,檢核點用于檢驗BP神經網絡效果.
圖3 網格點分布
3.3 實驗流程
1)獲取坐標及距離參考值
利用MS50全站儀測量各UWB基站和網格點的坐標,并通過坐標反算求得標簽與各基站間距離的參考值.
2)測距穩定性測試
將UWB標簽置于長時間測距點上,進行采樣率為10 Hz、持續50 min 的數據采集,得到30 000歷元的數據,對測距穩定性進行分析.
3)網格點數據采集與測距誤差分析
利用UWB標簽對采樣點和檢核點進行逐一測量,采樣率為10 Hz、持續30 s,每點可獲得4×300=1 200個測距值;將測距值減去步驟1)中得到的參考值,對測距誤差進行統計分析.
4)網絡建模與樣本選擇
建立兩種模型:BP1 模型的輸入節點數量為4,
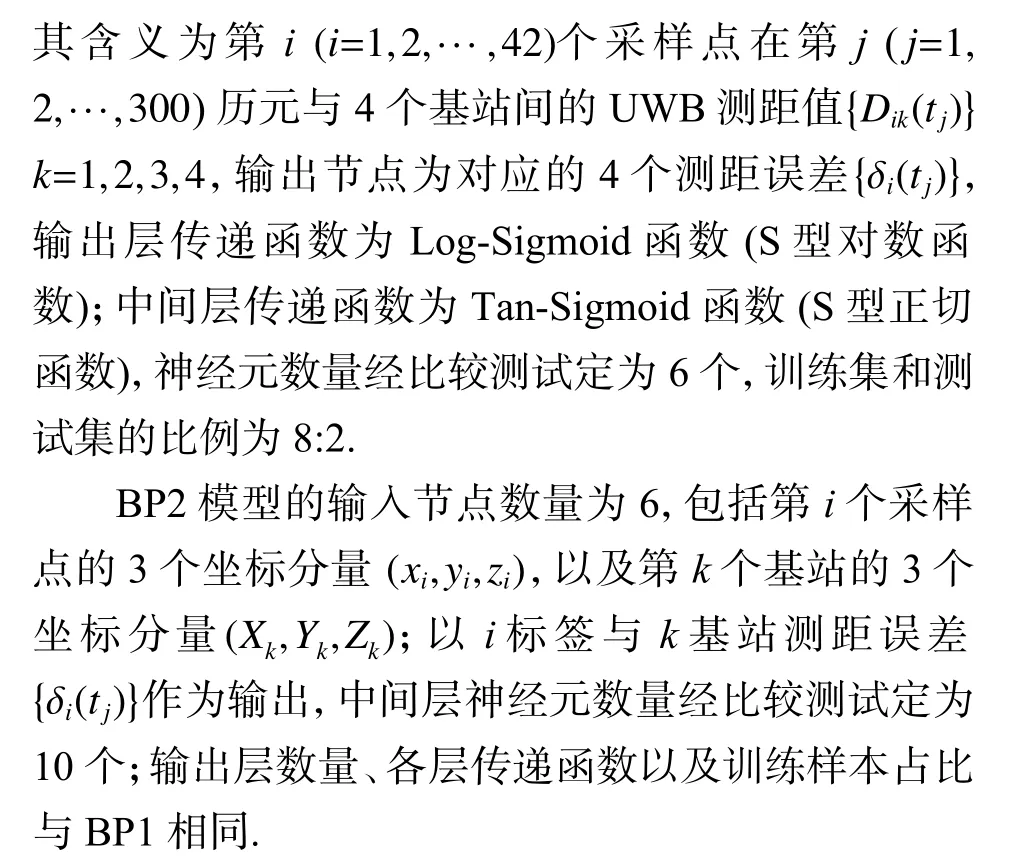
5)模型訓練與比較分析
將42 個采樣點上的UWB測距值和坐標分別輸入兩個模型進行訓練.5 個檢核點的數據不參與訓練,用于評價模型的測距誤差預測精度;進一步利用改正后的測距值進行定位解算,與參考坐標求差,統計定位精度.在檢驗BP2時,假定各檢核點的參考坐標未知,先利用UWB原始測距值通過最小二乘法得到檢核點的概略坐標,輸入訓練好的BP2網絡模型,分別得到其與4個基站間的測距改正值,對4個測距值均進行改正后,再進行最小二乘解算,并代入BP2模型中,重復上述過程,直至坐標變化量小于10?5.一般迭代5~8次后即可收斂.
整體實驗設計方案如圖4所示.
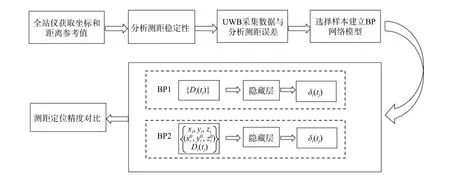
圖4 實驗流程圖
4 實驗結果
4.1 測距穩定性分析
將標簽50 min 的連續測距值與全站儀測定的距離值求差,差值序列如圖5所示,其與4個基站間距離誤差的統計信息如表1所示.由圖5可知,測距誤差較為穩定.由表1可知,標準差遠小于誤差均值,即測距誤差隨時間變化幅度遠小于測距誤差本身,因此在各采樣點上進行30 s的數據采集可以較為真實的反映其測距性能.
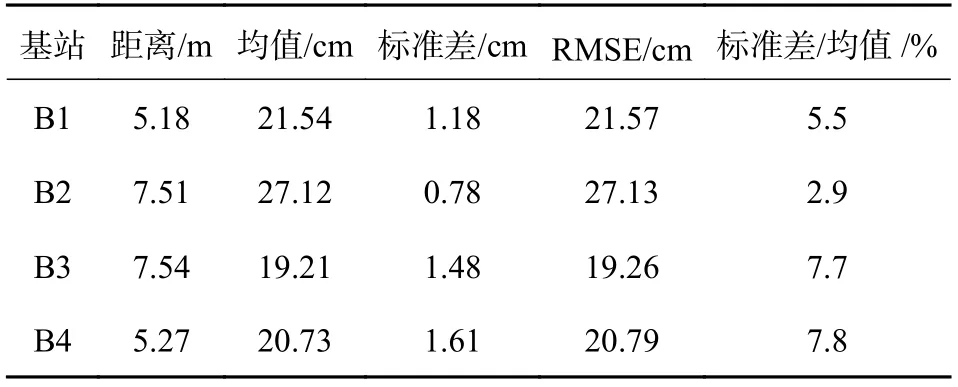
表1 長時間測距點上測距誤差統計
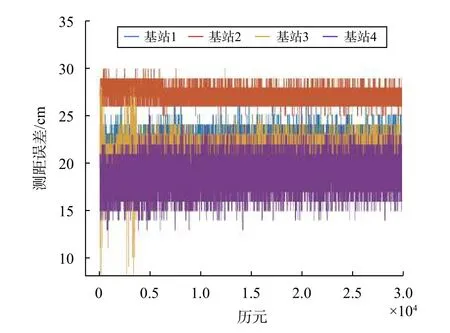
圖5 單點測距序列
4.2 測距精度分析
1)測距誤差統計
將所有網格點的距離測量值(共計42×300×4=50 400個)與全站儀測得的距離值作差,統計其均值和RMSE,結果如表2所示.
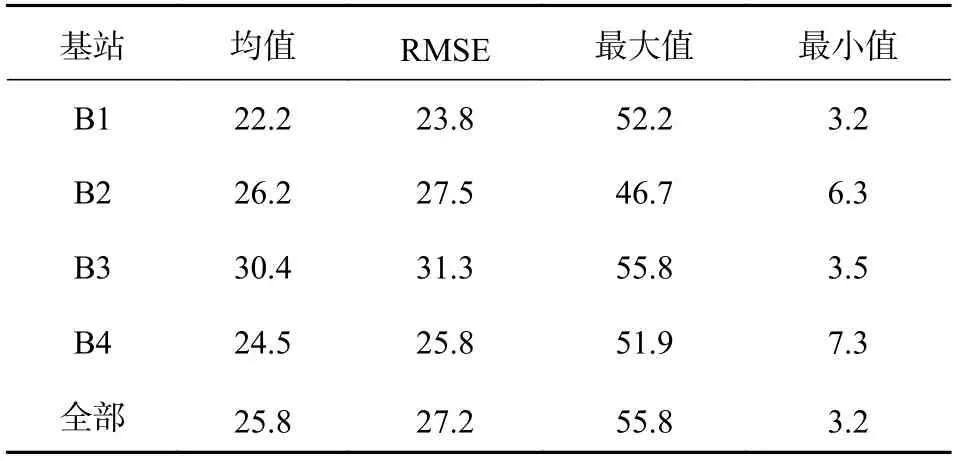
表2 測距誤差統計cm
由表2可知,實驗使用的UWB測距誤差的均值約為26 cm,RMSE值約為20~30 cm,最大可達56 cm,最小為3.2 cm,存在一定的系統性偏差,即總比參考距離要大.這主要是因為受到室內多路徑等非視距因素的影響,標簽與基站3之間的測距誤差明顯大于與其他基站間的測距誤差,這是因為基站3附近存在一較大反射面(60寸液晶電視屏),非視距誤差偏大.
2)測距誤差與距離相關性分析
為分析測距誤差與距離之間的相關性,以網格點到基站的距離為橫軸,對應的測距誤差均值為縱軸,繪制散點圖,如圖6所示.
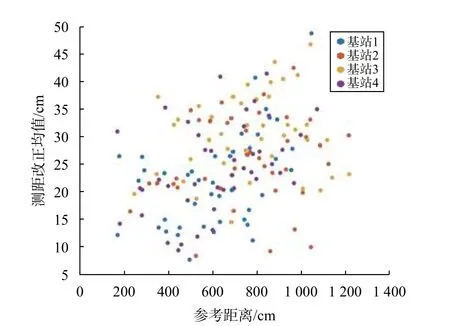
圖6 誤差-距離散點圖
由圖6中可知,測距改正值和距離之間不存在明顯的線性相關性.同一基站的測距值,距離大的誤差不一定比距離小的誤差大,反之可能更小.因此不能簡單地在測距值和誤差之間建立線性改正模型.
3)測距誤差空間相關性分析
以網格點對某一基站的測距RMSE為半徑繪制測距誤差圓,每一子圖對應一個基站,如圖7所示.
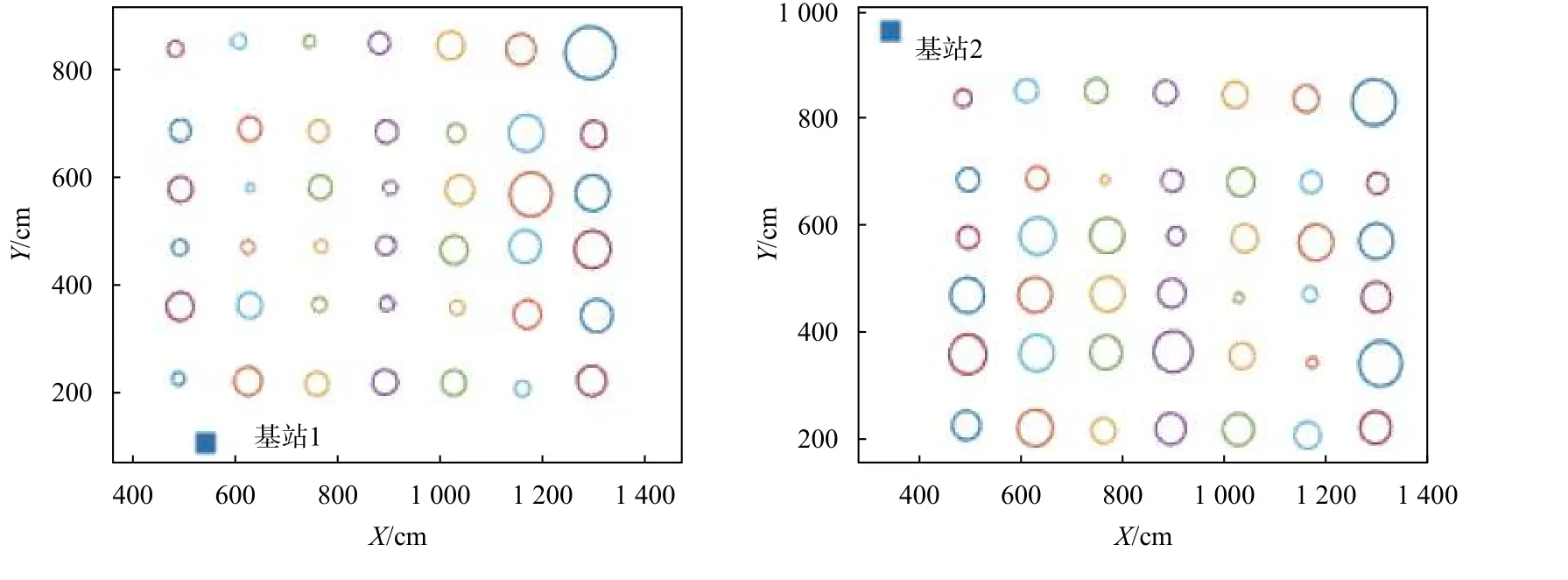

圖7 網格點測距誤差圓
由圖7可知,對同一基站,不同網格點的測距RMSE 并無明顯的空間分布規律,但不同基站間普遍呈現出一定的誤差分區現象,只是區域劃分各有不同,可見基站和網格點坐標對測距誤差均有影響,可將二者同時作為BP神經網絡的輸入,來擬合這種測距誤差的非線性分布.
4.3 BP 神經網絡對比分析
4.3.1模型訓練效果對比
模型訓練結果如表3所示.

表3 模型訓練狀態
由表3可知,BP2相關系數比BP1大0.11,更接近于1,這說明BP2有更好的擬合效果.
4.3.2測距改正精度對比
統計得到各測試點上標簽與所有基站的測距精度指標,結果如表4所示.由表4中可知經模型BP1、BP2改正后測距RMSE 明顯減小,相對于改正前,BP1平均減少83%,BP2平均減少91.7%.
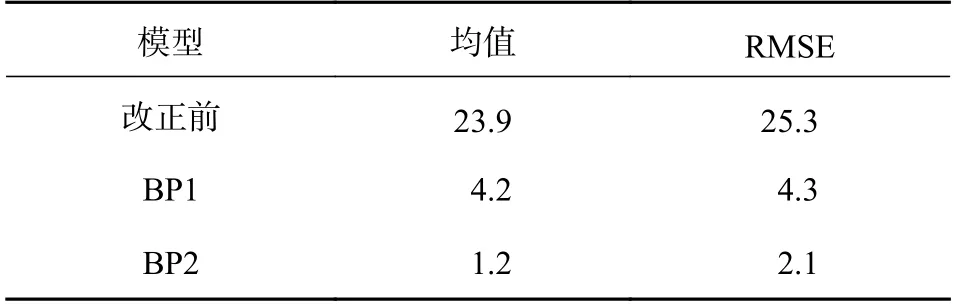
表4 測距精度cm
4.3.3定位精度對比
統計所有測試點改正前后X、Y、Z方向的定位RMSE,統計結果如表5所示.
由表5中可以知,相對于改正前的RMSE,X方向上BP1減少72.7%. BP2減少93.8%;在Y方向上BP1減少73.7%,BP2減少91.2%;在Z方向上BP1減少81.2%,BP2減少96.3%.

表5 測試點定位精度cm
以測試點T1為例,測距值經BP1、BP2改正前后,坐標散點圖分布如圖8所示,其改正后的X、Y、Z方向誤差序列如圖9所示.

圖8 測試點T1改正前后平面坐標散點圖
可以看出,進行誤差改正前,定位解算點明顯偏離參考坐標;利用BP1、BP2改正后解算點位與參考坐標間偏差均明顯減少,且BP2解算點與參考點更加接近、分布更加集中.
從圖9中可以看出在T1上,相對于BP1,BP2在Z方向精度提升幅度最大.
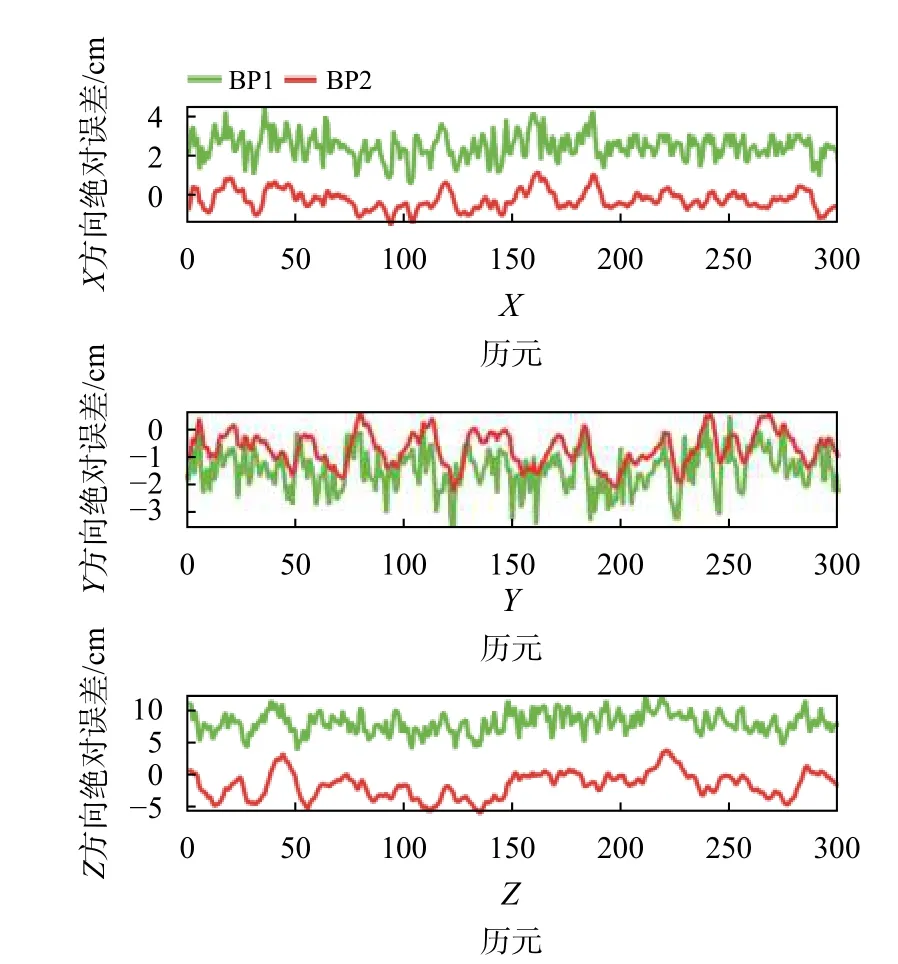
圖9 測試點T1定位誤差序列
5 結束語
UWB測距誤差是基站坐標和標簽坐標的復雜函數,難以通過常規方法建立精確改正模型.本文作者借助BP神經網絡強大的非線性擬合能力,建立了兩個不同網絡結構的誤差改正模型,以高精度全站儀測量結果作為模型訓練和對比測試的參考,實驗結果表明:兩種模型均能有效地改正測距誤差,提高定位精度.BP2模型以標簽、基站坐標作為輸入,相比以4個距離作為輸入的BP1模型,改正效果更加明顯,三個方向的定位精度均由改正前的dm 級提升至cm 級;且BP2模型的輸入不受基站數量限制,使其應用也更為靈活、適用性更強.需要注意的是,改正效果好的前提是室內環境沒有明顯變化,否則應重新進行參考值測定和模型訓練.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
