基于TRIZ方法的根莖類農作物收獲機械創新設計
2021-09-11 06:14:36武林岳張士軍張繼國李成真
南方農機 2021年17期
關鍵詞:機械
武林岳,張士軍,張繼國,李成真
(山東建筑大學機電工程學院,山東 濟南250101)
隨著科學技術的提高和農業研究的發展,越來越多的高產量根莖類農作物(生姜、馬鈴薯等)品種成功研制,使現代農業收獲中,根莖類農作物畝產不斷提高,且因其種植周期短、經濟效益高等優點,逐漸成為一些農民的主要經濟來源。但從目前的收獲環境來看,國內的根莖類農作物收獲不能達到全機械化收獲程度,收獲機械化率較低。以花生為例,據統計[1],目前我國花生的收獲機械化率僅40%左右。為了響應我國《中國制造2025》的政策引導與農業產業發展升級,利用TRIZ創新方法對傳統的收獲機械創新,設計出一款更合理的根莖類農作物智能收獲機械,提高工作效率。
1 TRIZ方法的應用與對機械的創新
1.1 為什么要用TIRZ方法
TRIZ是系統化的方法,在TRIZ中,問題的分析采用了通用且詳細的模型與理論方法[2],使創新有了系統化知識與解決問題的系統化過程。
1.2 應用TRIZ方法對收獲機械現狀的分析
本項目基于現有收獲環境,對根莖類農作物(生姜、馬鈴薯、花生等)進行收獲機械的研究。以生姜收獲機為例,如圖1、圖2所示,根據農業機械的專利數量與S曲線[3]的特點,收獲機械的技術性能已經處于成熟期或衰退期,因而需要一種新型且創新點突出的收獲機械。
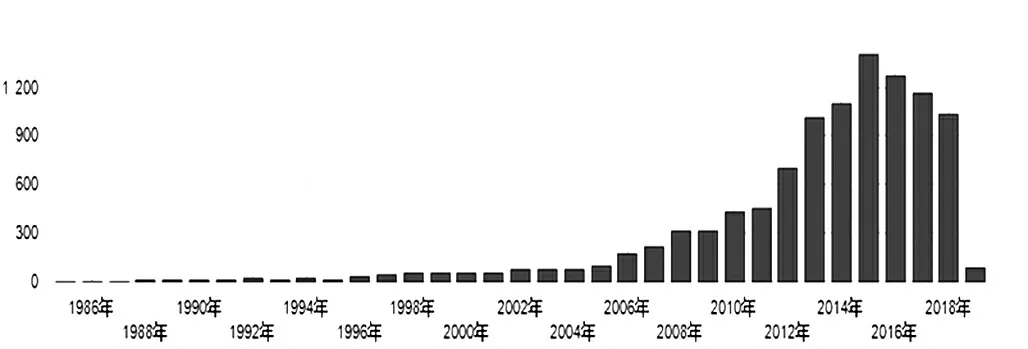
圖1 生姜收獲機專利數量分析圖
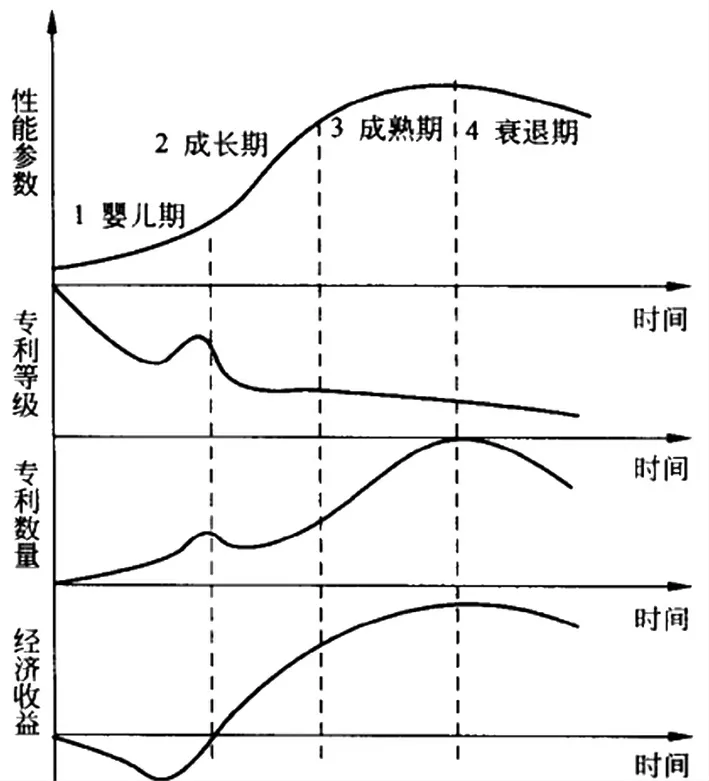
圖2 S曲線各階段特點分析圖
1.3 創新方向的確定
1.3.1 創新方向的總結
1)最終理想解:為了獲取完整干凈沒有莖稈的農作物果實,采用機械自動收獲處理的作業方式。
2)九屏法:對子系統、系統和超系統的分析,可利用系統的內部資源(莖稈)與超系統隱性資源能源(電能、化學能等)。
3)金魚法:對構想進一步分析,結合現有專利的設備功能,細化了機械的功能與結構。
1.3.2 機械進一步規劃的功能需要與結構設想
如表1所示[4],為機械所需功能。接下來需要對實際環境進一步分析,以確定合理的結構。
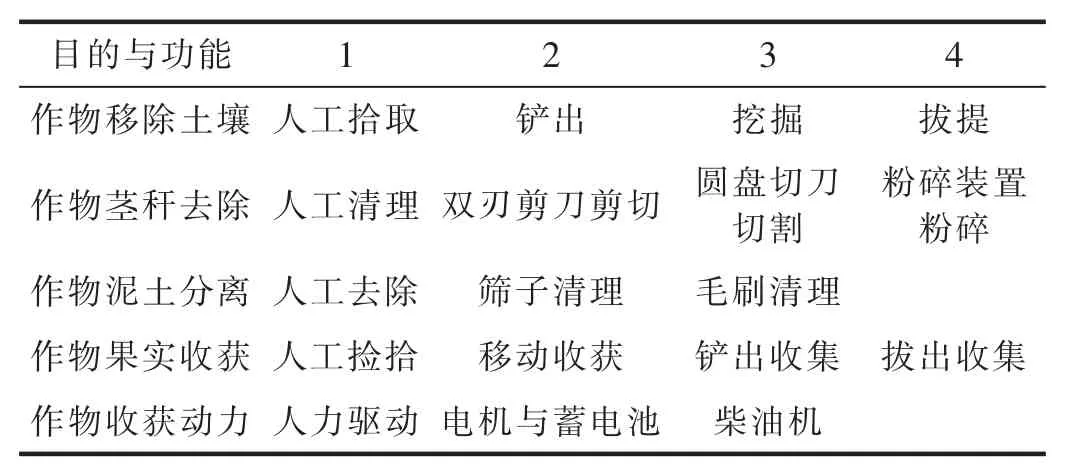
表1 目的需要與機械對應功能分析
1.4 技術系統進化法則分析
1.4.1 向超系統躍遷法則
根據向超系統躍遷法則,對超系統土壤地面的性質進行分析,調節夾持裝置的傾斜角度,使夾持裝置完成拔提。
1.4.2 能量傳遞法則
根據能量傳遞法則,收獲作業時間小于2 h,采用電動機和蓄電池驅動機械,提高能量利用效率;收獲作業時間大于2 h,采用柴油機作為動力裝置驅動機械,可控性更好,作業時間更長。
1.4.3 動態性和可控性法則
根據應用動態性和可控性法則,繪制如圖3所示的分析陰影,在移動性方面,通過動力裝置驅動機械進行移動。在可控性方面,利用結構優勢使夾持裝置夾持開口可調節,方便夾持、維修。對剪切裝置進行結構的設計,能夠對刀具高度進行一定程度的調整,方便機械適用于多種環境。在柔性方面,夾持裝置可用夾緊傳送帶來夾緊莖稈拔提,提高機械的柔性。
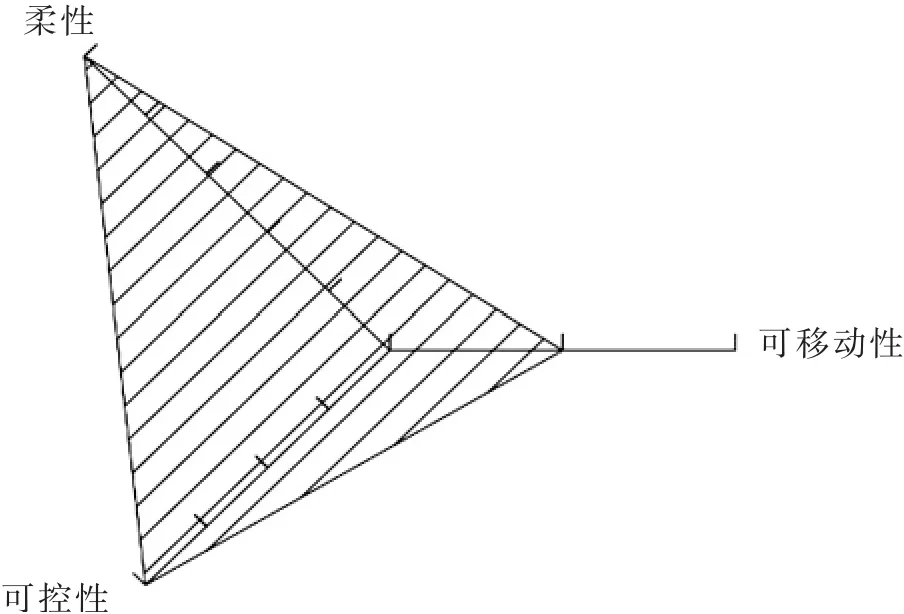
圖3 動態性和可控性法則分析陰影圖
1.5 問題與沖突的解決與技術方案
如圖4所示,為農作物生長與拔取狀態簡圖。
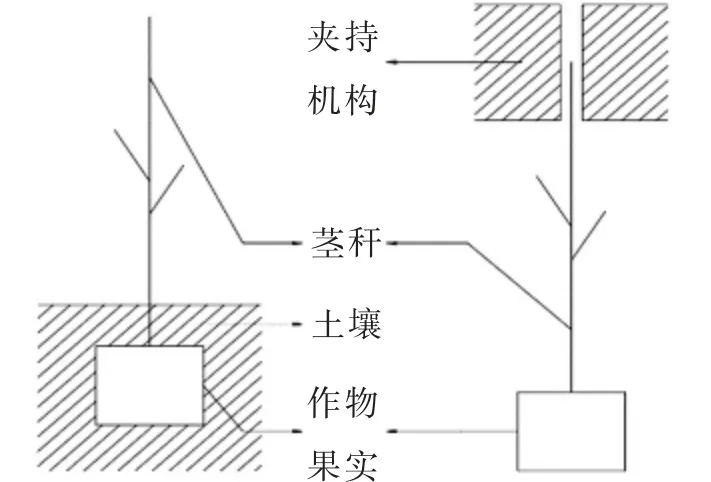
圖4 農作物生長與拔取狀態簡圖
1.5.1 物理沖突的解決
1)農作物生長環境的土壤緊固力解決。農作物果實與土壤的接觸面積既需要小又需要大。運用時間分離原理,生長時農作物果實與土壤充分接觸,成熟后使農作物果實與土壤的接觸面減少。運用空間分離原理,在成熟收獲時,運用松土犁疏松土壤,采用夾持裝置,拔提莖稈移出農作物[5]。
2)農作物莖稈的使用與處理。既需要農作物的莖稈,也不需要農作物的莖稈。采用時間分離原理,當農作物果實移出土壤時,保留莖稈,拔取農作物;當農作物果實移出土壤后,去除莖稈。采用條件分離原理,在拔提農作物的時候,夾持莖稈;在拔提傳送之后,用剪切刀具切去莖稈[6]。
1.5.2 四十條發明原理
阿奇舒勒通過對大量的發明專利進行研究、分析、總結,提煉出了TRIZ理論中最重要的、最具普遍用途的40條發明原理。(包括:1.分割;2.抽取;3.局部質量;4.非對稱;5.組合;6.普遍性;7.嵌套;8.配重;9.預先反作用;10.預先作用;11.預先應急措施;12.等勢原則;13.逆向思維;14.曲面化;15.動態化;16.不足或超額行動;17.維數變化;18.機械振動;19.周期性動作;20.有效作用的連續性;等。)
采用原理3局部質量原理。用松土裝置疏松土壤,使周圍泥土變得松軟、不均勻,方便拔提農作物。
采用原理18機械振動原理。去除農作物泥土時,設置振動篩的周期性振動,清理泥土。
采用原理17維數變化原理、原理20有效作用的連續性原理。使用輔助撥動裝置,集中收攏農作物莖稈,方便精準拔提。設計多層排列結構,從上至下依次為莖稈剪切、泥土分離和果實收集。各個部分都能進行持續工作,消除了間歇性動作,工作節奏緊湊連續,提高收獲效率。
采用原理5組合原理、原理15動態化原理。設計墊塊和刀片組合的方式,通過調節墊塊的位置改變圓盤切刀高度,同時在墊塊的緊固作用下,可使圓盤切刀旋轉更穩定。設置可調節夾持開口,有利于機械收獲多種環境的根莖類農作物[7]。
1.5.3 最終技術方案
1)農作物移出土壤:夾持裝置(夾緊傳送帶)、輔助撥動裝置、松土裝置(松土犁),精準快速拔取農作物果實。
2)農作物莖稈去除:剪切裝置(圓盤切刀和墊塊),穩定剪切,切刀可調節高度。
3)農作物泥土清理:泥土分離裝置(振動篩和毛刷),雙重作用使農作物與泥土分離,毛刷還具有下落緩沖功能。
4)農作物果實收集:果實莖稈收集裝置(果實收集箱和莖稈收集箱),分別收集果實和莖稈。
2 收獲機械的工作原理與裝置分析
2.1 工作原理
收獲機械充分利用根莖類農作物特點,采用拔提與移動巧妙結合的方式實現農作物收獲。其工作原理是:調節好夾持開口角度與圓盤切刀高度,通過松土犁松土與輔助撥動裝置集中莖稈,夾持裝置拔提莖稈并傳送至上方,剪切裝置切去莖稈,果實落入毛刷和振動篩組成的泥土分離裝置中,果實清潔完成落入果實收集箱中,被切去的莖稈落入后方莖稈收集箱中。具體的收獲機械模型圖如圖5所示。
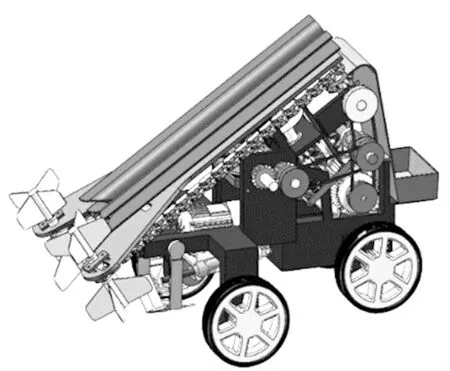
圖5 收獲機械模型圖
2.2 動力裝置分析
動力裝置根據種植規模不同,采用不同方案進行動力裝置搭配,有以下兩種方案:1)電動機+蓄電池的搭配方案;2)以柴油機為動力裝置的方案。當收獲規模小、收獲作業時長小于2 h時,使用電動機和蓄電池作為動力裝置提供動力;收獲時長在2 h以上,使用柴油機作為動力裝置提供動力。機械最終的工作效率應為每小時1畝~1.5畝。
2.3 松土裝置分析
如圖6所示,松土裝置采用松土犁松土,通過收獲機械的前進和松土裝置的前后擺動松土,減少土壤對農作物的根莖果實的束縛力,方便夾持機構拔提出農作物,擺動幅度介于25°~35°。
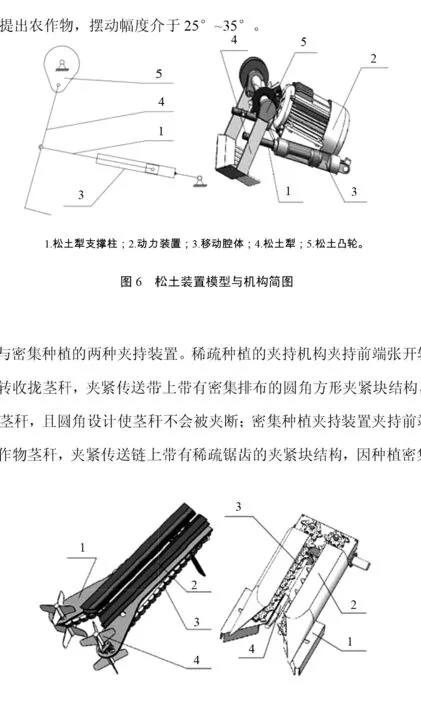
圖6 松土裝置模型與機構簡圖
2.4 可調節精準夾持傳送裝置
如圖7所示,為稀疏種植與密集種植的兩種夾持裝置。稀疏種植的夾持機構夾持前端張開較大,輔助撥動裝置位于夾持位置的前段外側,相對向內旋轉收攏莖稈,夾緊傳送帶上帶有密集排布的圓角方形夾緊塊結構,因種植稀疏,圓角方形夾緊塊能夠更好地固定夾持農作物莖稈,且圓角設計使莖稈不會被夾斷。密集種植夾持裝置夾持前端張開較小,輔助撥動裝置處于下方,相對向內旋轉收攏農作物莖稈,夾緊傳送鏈上帶有稀疏鋸齒的夾緊塊結構,因種植密集,鋸齒可更好地插入莖稈內部,夾持拔提莖稈。
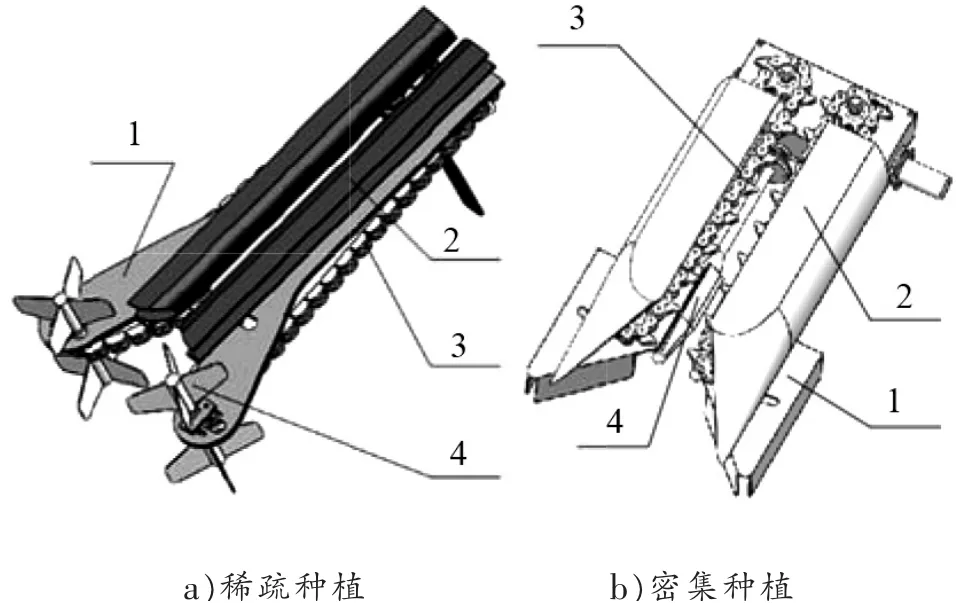
圖7 夾持裝置結構模型圖
夾持裝置與水平面應傾斜放置,將農作物傳送至上端,進行后續的莖稈剪切與泥土分離工作。如圖8所示,夾持裝置與水平面的傾斜角度為θ,θ在30°~40°范圍內。根據農作物莖稈的情況,通過可調節板架進行夾持開口的調節,夾持開口角度α可調節范圍為5°~30°。可調節的夾持開口,能夠適應多種環境的作物夾持,方便維修與機械檢查等。
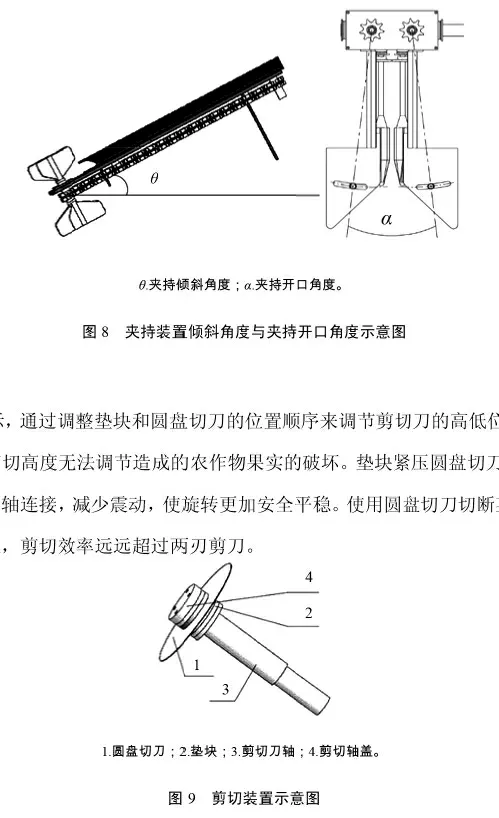
圖8 夾持裝置傾斜角度與夾持開口角度示意圖
2.5 可調節剪切裝置
剪切裝置示意圖如圖9所示,通過調整墊塊和圓盤切刀的位置順序來調節剪切刀的高低位置,可以適用于剪切多種不同莖稈長度的農作物,減少了因剪切高度無法調節造成的農作物果實的破壞。墊塊緊壓圓盤切刀,與剪切軸蓋通過四個螺栓固定,剪切軸蓋通過螺紋與剪切刀軸連接,減少震動,使旋轉更加安全平穩。使用圓盤切刀切斷莖稈,墊塊可調節高度為4 mm×25 mm,旋轉平穩,剪切快速,剪切效率遠遠超過兩刃剪刀。
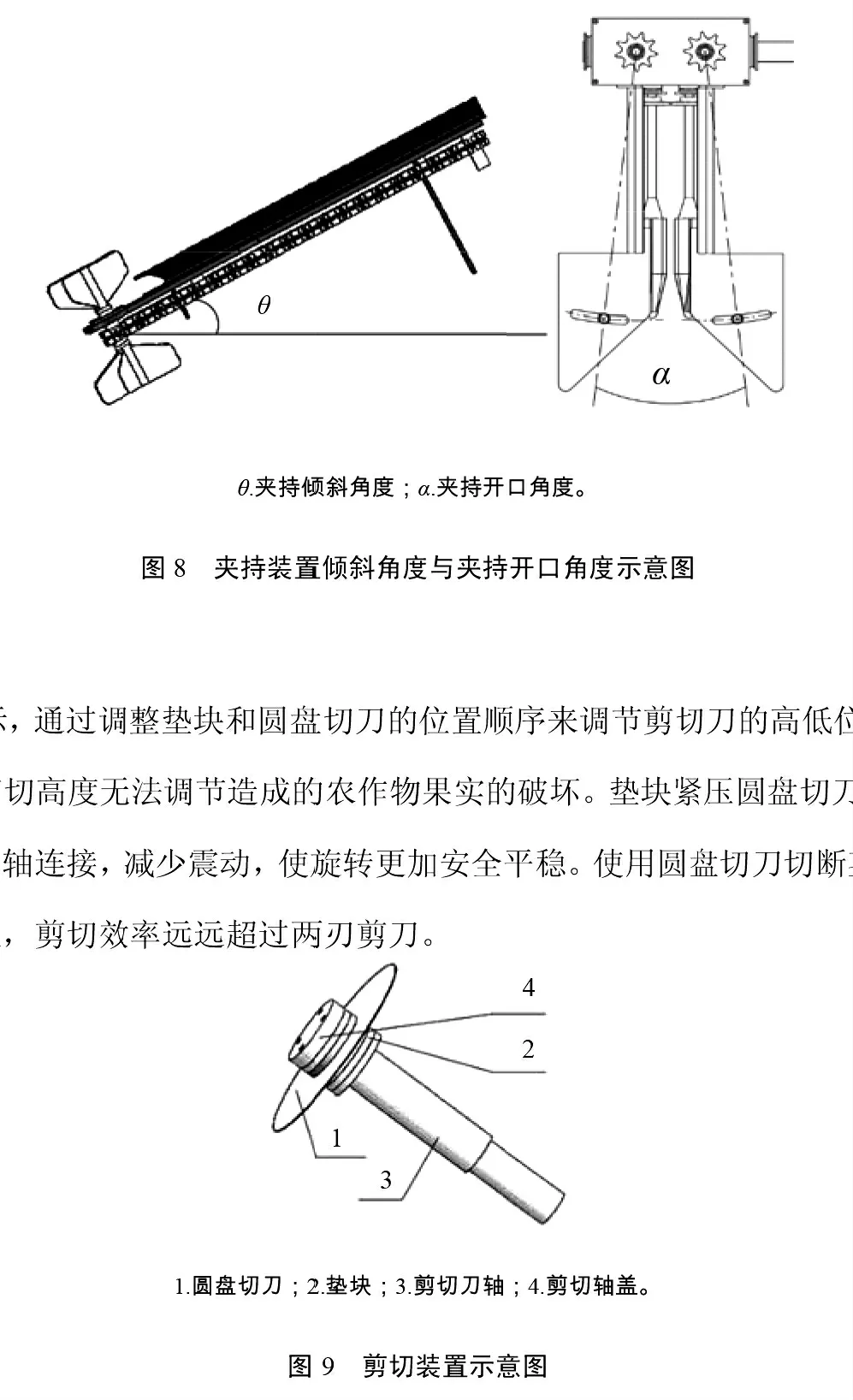
圖9 剪切裝置示意圖
2.6 泥土分離裝置
泥土分離裝置與機構簡圖如圖10中左圖所示,毛刷與振動篩[8]組成的泥土分離裝置兩次分離泥土,不僅能夠使果實上的泥土分離得更徹底,而且毛刷作為初分離的裝置在農作物下落時也能起到緩沖的效果,保護農作物果實不會因為過脆而導致下落時受沖擊摔碎[9]。振動篩的極位夾角如圖10中右圖所示,μ在10°~20°范圍內,可根據農作物種類進行調整,設置篩土軸轉速范圍為120 r/min~180 r/min。
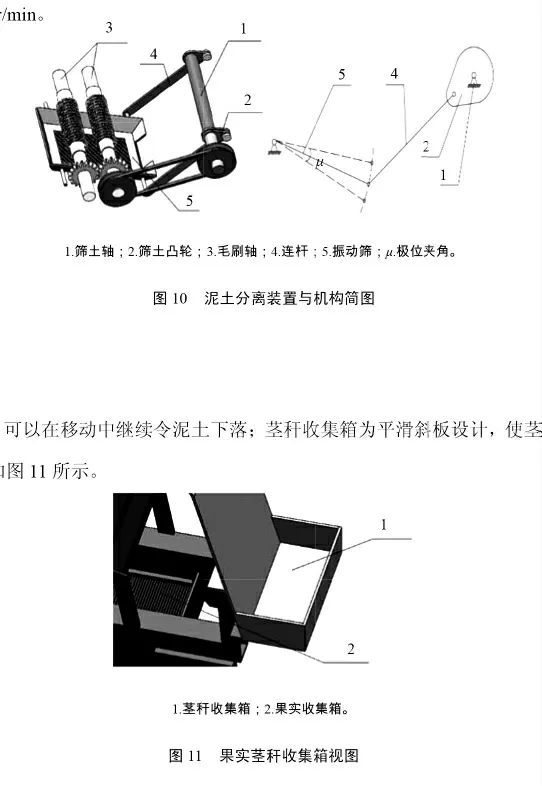
圖10 泥土分離裝置與機構簡圖
2.7 果實莖稈移動收集裝置
2.7.1 收集裝置
果實收集箱為鏤空設計,可以在移動中繼續令泥土下落;莖稈收集箱為平滑斜板設計,使莖稈自然落入收集箱中。分別用于收集農作物的果實與莖稈,如圖11所示。
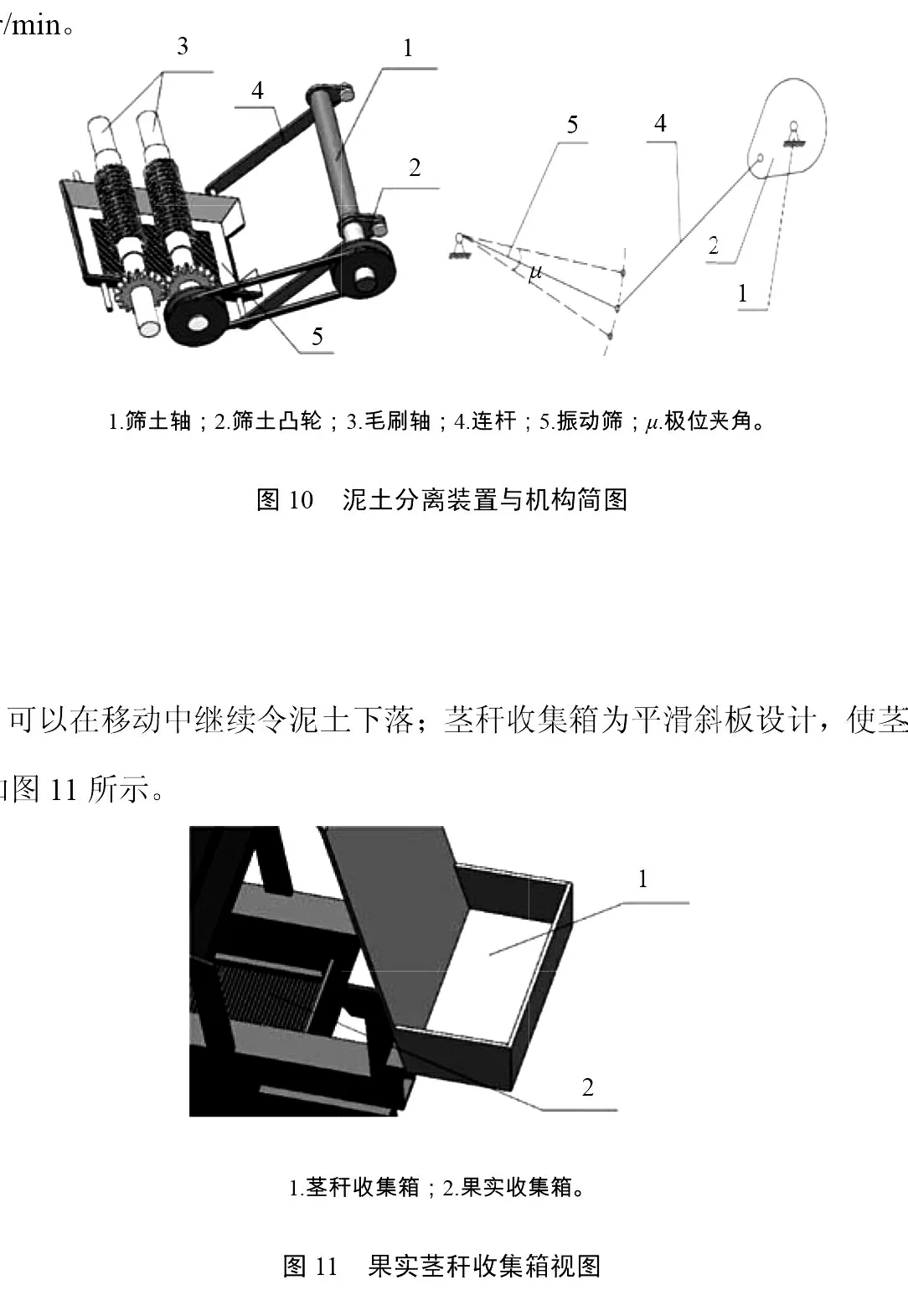
圖11 果實莖稈收集箱視圖
如圖12所示,為機械工作流程示意圖。莖稈的收集流程,通過多層排列和流水線式的作業方式,在完成了其他功能之后,移動中便可收集干凈的果實與被切斷的莖稈。
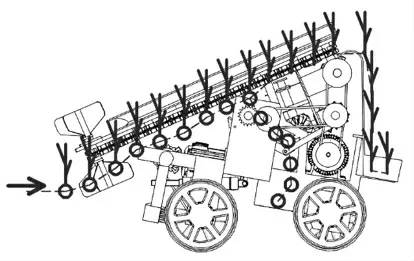
圖12 機械工作流程示意圖
2.7.2 行走裝置
基于根莖類農作物收獲環境的不同,設計出兩種不同的行走輪,如圖13所示,使機械能夠在不同的土壤狀態下正常移動作業。普通行走輪適合土壤有良好摩擦力的平緩地面環境,可以使機械平穩運行;并可采用帶有花紋的橡膠輪胎,在減震的同時與土壤具有適當的摩擦,更能幫助正常平穩作業。而在某些特殊土壤環境下,為了避免行走輪因打滑等問題無法前進,設置了一種增加抓地力的行走輪,可在特殊的土壤環境下正常行走作業。
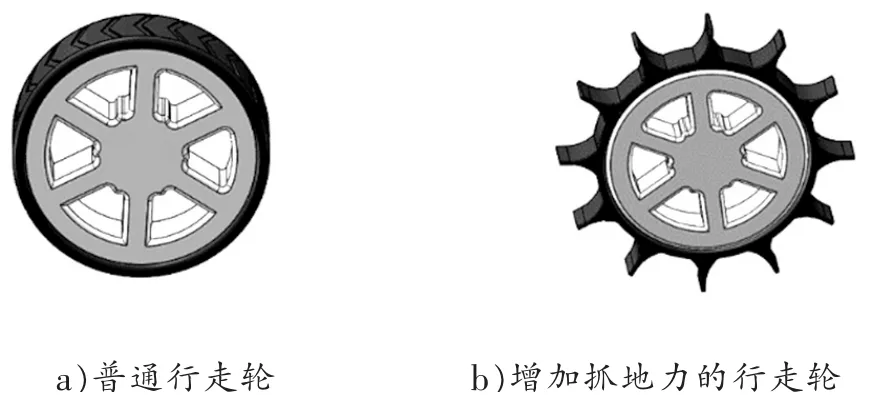
圖13 行走輪視圖
3 結論
利用TRIZ方法設計創新的此種一體化收獲機械,不僅做到了結構簡單,功能齊全,而且從可調節性與可適應性的角度進行了考慮,對多種根莖類農作物或多種種植環境都能有很好的兼容性,對農業機械的發展具有了一定的研究意義與價值。作為一種機械產品,不僅可以進行貿易交流,也可以不斷地進一步創新發展,根據TRIZ方法提供的經驗,我國能夠更好地利用該方法進行農業機械的高水平發展與智能化提升。
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
