汽車正面防撞輔助系統的認知及故障分析
2021-09-10 05:50:02韓孟
內燃機與配件 2021年15期
韓孟


摘要:2016年9月,美國汽車工程協會(SAE)制定標準J30162016,定義汽車自動化為六個等級。截止目前,北京現代名圖汽車按照這個標準劃分,屬于2級半自動化。筆者按照此標準解讀,也就是說,北京現代名圖汽車中安裝了高級駕駛輔助系統,例如:車道保持輔助、后側方盲區防撞輔助等等。以下介紹的正面防撞輔助系統(英文名稱縮寫:FCA)(以下簡稱FCA)只是多個輔助系統中的一員。主要功用是保證行車過程中,保證駕駛人與乘客的人身安全,或是當碰撞無法避免時,最大程度的降低事故等級。
關鍵詞:FCA;前雷達傳感器;前攝像頭;TTC;QQ值
中圖分類號:U469? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-957X(2021)15-0120-02
1? 正面防撞輔助系統的認知
正面防撞輔助系統是指汽車在行駛中防止與前方物體發生碰撞的行駛安全功能,如果檢測到存在與前方車輛/行人/騎車人發生碰撞的危險性,就會發出警報。發出警報后,如果發生碰撞的危險性增大時,就會采取制動控制措施。
正面防撞輔助系統的組成如圖1所示。
FCA采用萬都前雷達傳感器主要用于檢測前方物體,該雷達傳感器的規格:頻率77GHz、最大檢測距離174米、檢測目標最多64個,安裝在散熱器格柵上。前雷達傳感器由短程傳感器和長程傳感器組成。短程傳感器可檢測到距離車輛50米、角度在60°范圍內的物體。長程傳感器主要檢測距離在174和角度在20°范圍內遠離本車輛的物體。雷達傳感器中包含的天線的最大檢測范圍為174米,發射頻率77GHz,這是特定于車輛的長程頻率,并接收前方車輛反射的電磁波頻率。雖然雷達傳感器可以檢測到多達64個目標,但只有1個目標車輛的信息被用來控制車距。一旦通過天線確定目標車輛,SCC ECU使用接收的目標車輛信息計算目標速度、目標車距和目標加速度/減速度,并發送給ESC。
1.1 FCA采用萬都前視攝像頭
主要用于通過識別目標的獨特形狀模式,判斷目標的類型,該攝像頭使用100萬像素,與控制器集成,安裝在擋風玻璃上部。用于實現高級駕駛輔助模式的攝像頭從圖像傳感器采集的圖片中獲取特定環境因素的數據(如車道、物體、紅綠燈、交通標志、車輛、行人)。前視攝像頭使用圖像的坐標和水平寬度來計算與對象的距離。使用攝像頭,可以通過識別物體的獨特形狀來識別物體的類型。
1.2 FCA工作邏輯
根據由前雷達傳感器和前視攝像頭傳送的信息進行綜合分析,并在預測到存在與目標車輛、行人或騎車人等物體發生碰撞的危險性時,自動采取制動控制措施,以輔助將各種危險性降至最低。
如果檢測到存在與前方物體發生的危險性,FCA功能將根據碰撞剩余時間(TTC)啟動警報控制和輔助制動控制。FCA功能啟動控制的主要因素是碰撞危險等級。如果碰撞危險等級為2級或以下,僅啟動警報控制。如果碰撞危險等級為3級,就會自動采取緊急制動控制措施。在緊急制動過程中,車輛制動控制的最大減速度為1g。1g表示當車速為35kPh的車輛進行緊急制動,而車速在1.0秒鐘達到0kPh時,駕駛員所承受的重力加速度載荷量。因此,FCA功能在車輛制動距離不足和高速行駛的條件下啟動,則無可挽回與前方障礙物的碰撞事故。①如,本車輛以40kPh的速度行駛,而目標車輛或行人突然出現在本車輛前方時(駕駛員看不見前方)。②TTC接近2.0秒鐘時,系統啟動1級警報(視覺/聽覺警報),并準備制動(預加壓)。③TTC變為約1.5秒鐘時,系統啟動2級警報(視覺/聽覺警報),并采取減速度約為0.2g的預制動控制措施。④TTC變為約1.0秒鐘時,系統啟動3級警報,并采用減速度約為1.0g的制動控制措施。⑤如果車輛通過FCA功能控制而停車,保持停車狀態約2.0秒鐘。
FCA功能用于降低碰撞破壞的程度。此功能并不可能在所有的駕駛條件下都能防止與前方障礙物的碰撞。此功能在低速條件下(車速為30kPh以下)能有效地防止碰撞發生,但是根據室外溫度/濕度、車輛狀況(如輪胎、制動器等狀態)、路況(如砂石路、積雪等)等多種條件因素,可能無法防止在所有條件下碰撞的發生。
綜上所述,FCA的工作原理是,行車過程中,前雷達傳感器與前視攝像頭共同配合,測試出到前面障礙物的即時車速和距離,并將此信號輸送至FCA的控制模塊,模塊通過計算、分析后,計算出TTC,結合實際TTC,FCA模塊控制相關報警器發出警報,或者觸發制動系統自動工作,使車輛及時減速或停車。雖然,車速超過30km/h時,即使采用緊急剎車,仍不能避免與前障礙物發生事故,但碰撞危險的影響已經大大降低。
1.3 FCA的局限性
雖然,FCA稱為正面防撞輔助系統,但是,并不能說明在任何條件下,都能起到正面防撞的作用。
①如果車速在30km/h以上時,即使采用緊急制動措施,仍存在與前方車輛發生碰撞的危險;
②在彎道行駛時,沒有操作方向盤,或者直路行駛,操作方向盤,系統都無法啟動控制;
③直射強光、煙霧易導致攝像頭功能異常;
④雷達傳感器罩污染易導致功能異常。
2? 正面防撞輔助系統的故障分析與排除
2.1 故障現象
一輛2017年12月份生產的北京現代名圖轎車,行駛里程為20188公里,儀表提示請檢查前防撞系統,隨后客戶進店檢修。
2.2 故障診斷
接車后,經過詢問客戶得知,最近車輛停至路邊,前方車輛操作不當,造成兩車相撞,而后,儀表顯示FCA正面防撞輔助系統的報警燈點亮。將車輛開至封閉道路進行路試,當車速以40km/h的速度行駛,而障礙物突然出現在本車輛前方時,正面防撞輔助系統在本應做出響應的時間范圍內,沒有響應,因此,路試判斷FCA失效。用GDS讀取故障碼C162078,SCC/AEB校準失敗,通過路試和儀器測試,共同得出一致結論:FCA系統確實存在故障。
2.3 FCA的故障排除
拆檢前保險杠,發現前雷達模塊受到撞擊而損壞,模塊支架斷裂。通知配件部門訂貨更換前雷達模塊及支架總成。
2.3.1 更換前雷達模塊后,需要重新進行程序匹配,具體操作過程為執行變形程序編碼,輸入與車輛兼容的選配項
①在雷達傳感器背面的標簽中,檢查批號的最后兩位代碼(QQ)。
“QQ值”:雷達傳感器在生產過程中由于制造誤差而產生的垂直角度誤差,用2位代碼(字母+數字)表示。
②在代碼輸入最后的兩位代碼,然后按下[確認]按鈕。見表1。
2.3.2 雷達傳感器校準
①從GDS診斷儀上選擇“雷達傳感器校準”項。
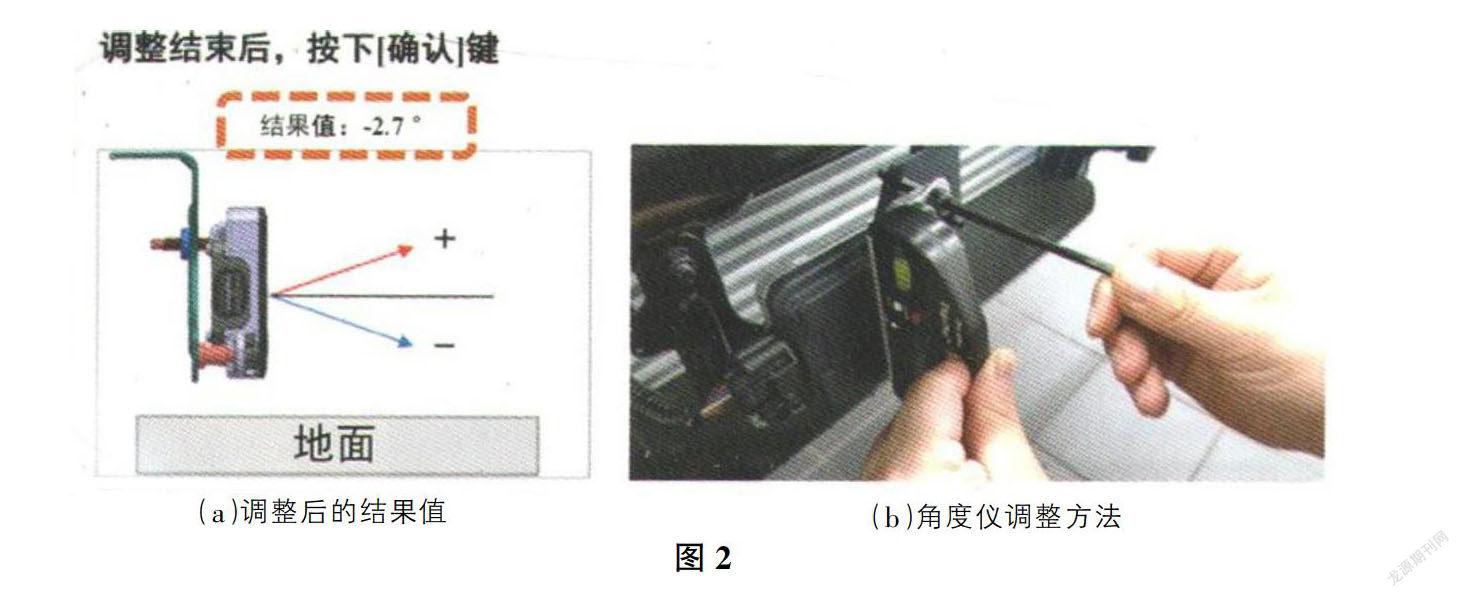
②檢查校準準備和條件,拆卸前保險杠,檢查并輸入雷達傳感器背面標簽上批號的最后兩位代碼。見圖2的(a)圖和(b)圖。
③一旦輸入QQ值,GDS診斷儀就會顯示根據垂直角度參考值和QQ值計算的結果值。轉動調整螺釘(T20)的同時觀察傾斜儀,按照結果值調整垂直角度。
如圖2(a)、圖2(b)圖所示,結果值“-2.7°”把垂直角度從90°調整到“-87.3°”、。
④參考維修手冊內容,將新型反射器安裝在制定位置,并安裝保險杠。
如果當前數據流顯示安裝保險杠前后的角度差太大,說明保險杠上的雷達傳感器罩可能已經變形。
⑤最后,駕駛車輛(以大于60km/h的速度駕駛車輛10分鐘以上),以提高雷達傳感器的精確度。
故障排除:更換前雷達傳感器模塊,并對前雷達傳感器模塊進行校準后試車,故障徹底排除。
參考文獻:
[1]戴衛兵,徐超,陳悅.基于計算機視覺的輔助駕駛系統設計[J].科技與創新應用,2020.
[2]王永宏.基于機器視覺的汽車先進駕駛輔助系統中行人檢測技術研究[D].浙江大學,2019.
[3]李克強,戴一凡,李升波,邊明遠.智能網聯汽車(ICV)技術的發展現狀及趨勢[J].汽車安全與節能學報,2017,8(01):1-14.
[4]范延軍.基于機器視覺的先進輔助駕駛系統關鍵技術研究[D].東南大學,2016.
[5]車云網.從ADAS到自動駕駛2016智能網聯汽車發展報告[J].產品可靠性報告,2017(04):58-62.