基于不同車速條件下的換道預(yù)警方法研究
2021-09-10 07:22:44賀曉宇陳麗潔楊梅
交通科技與管理 2021年16期
賀曉宇 陳麗潔 楊梅




摘 要:統(tǒng)計(jì)結(jié)果表明,車輛換道導(dǎo)致的交通事故數(shù)量約占事故總數(shù)的27%,其中緊急換道行為是主要的誘因,它導(dǎo)致的交通堵塞時(shí)間占到全部碰撞事故交通延遲的10%。而在行車過(guò)程中,換道行為是不可避免并且頻繁發(fā)生的,因此駕駛員提供換道危險(xiǎn)預(yù)警,可以降低事故發(fā)生的概率。而車輛在行駛中,駕駛員用來(lái)做決策的時(shí)間是非常短的,因此對(duì)換道預(yù)警模型的實(shí)時(shí)性有極高的要求。為達(dá)到提高預(yù)警模型靈活性的目的,本文提出了一種實(shí)時(shí)動(dòng)態(tài)的安全換道可行區(qū)域模型,無(wú)論駕駛員以何種方式換道,只需檢測(cè)車輛的實(shí)時(shí)位置是否在安全區(qū)域內(nèi)即可。其中換道軌跡分為最慢換道軌跡、最快換道軌跡。用七次多項(xiàng)式規(guī)劃換道軌跡,其中由最大曲率確定最快換道軌跡,由安全碰撞時(shí)間確定最慢換道軌跡。識(shí)別出換道行為后,在車輛行駛中,模型會(huì)根據(jù)自車車速和其他車相對(duì)自車所在的位置,劃分出不同的安全范圍,當(dāng)自車不在安全范圍內(nèi)則模型預(yù)警。
關(guān)鍵詞:換道;換道軌跡;動(dòng)態(tài)安全可行區(qū)域
1 車輛換道軌跡
國(guó)內(nèi)外研究人員提出了很多的換道軌跡模型,換道軌跡模型反應(yīng)著車輛的操縱穩(wěn)定性和行駛安全性[1],Eshelman提出了7次多項(xiàng)式換道軌跡,F(xiàn)ett提出了圓弧軌跡模型[2],Limpert提出了正弦曲線模型[3],裴玉龍?zhí)岢隽甩聵訔l曲線[4],徐慧智提出了緩和曲線[5],Kanayama提出了螺旋線模型。參考前人的研究,本文選擇含有8個(gè)參數(shù)的七次多項(xiàng)式和直線運(yùn)動(dòng)方程公式,分別描述側(cè)向軌跡和縱向軌跡,車輛換道軌跡函數(shù)可表示為:
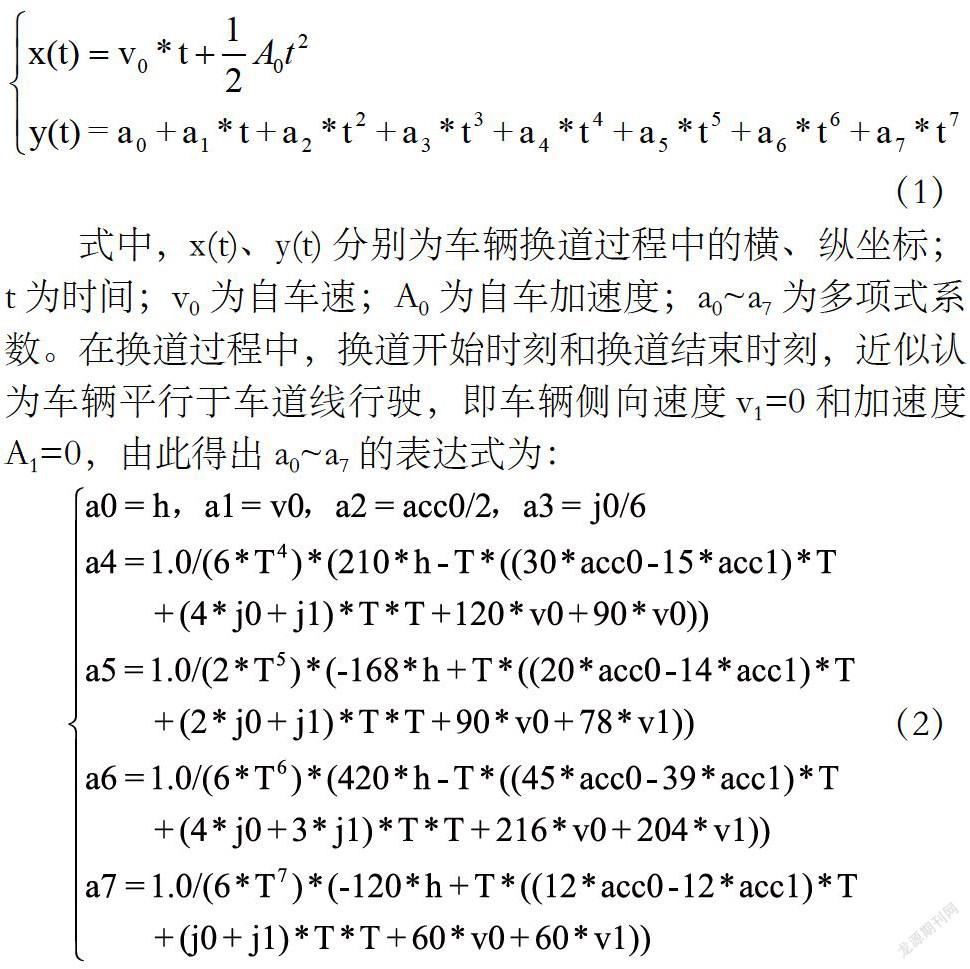
式中,x(t)、y(t)分別為車輛換道過(guò)程中的橫、縱坐標(biāo);t為時(shí)間;v0為自車速;A0為自車加速度;a0~a7為多項(xiàng)式系數(shù)。在換道過(guò)程中,換道開(kāi)始時(shí)刻和換道結(jié)束時(shí)刻,近似認(rèn)為車輛平行于車道線行駛,即車輛側(cè)向速度v1=0和加速度A1=0,由此得出a0~a7的表達(dá)式為:
式(2)中,h為換道初始時(shí)刻自車和目標(biāo)車橫向相對(duì)距離,按照我國(guó)的公路建設(shè)行業(yè)標(biāo)準(zhǔn),取道路寬度h為3.75 m。v0為換道初始時(shí)刻橫向速度,acc0為換道初始時(shí)刻橫向加速度,j0為換道初始時(shí)刻橫向加速度;v1為換道結(jié)束時(shí)刻橫向速度,acc1為換道結(jié)束時(shí)刻橫向加速度,j1為換道結(jié)束時(shí)刻橫向加速度,T為總換道時(shí)間。式(2)化簡(jiǎn)得:
2 安全指標(biāo)
2.1 縱向安全指標(biāo)
本模型以碰撞時(shí)間(TTC)作為縱向安全評(píng)價(jià)指標(biāo),參考文獻(xiàn)[6]實(shí)驗(yàn)心理學(xué)中的SDT分析方法確定預(yù)警模型。對(duì)于自車和目標(biāo)車的相對(duì)速度Δv、相對(duì)距離Δd,分別采用不同的TTC預(yù)警閾值。采集自車和目標(biāo)之間的狀態(tài),根據(jù)表1選擇數(shù)值大的作為預(yù)警閾值。
2.2 盲區(qū)預(yù)警
參考國(guó)際標(biāo)準(zhǔn)ISO 17387-2008中的C型系統(tǒng),對(duì)于自車周圍3 m內(nèi)的目標(biāo)盲區(qū)預(yù)警。
2.3 橫向安全指標(biāo)
橫向極限狀態(tài)發(fā)生在:自車可以追上自車道前車時(shí)、自車可以換道至目標(biāo)車道前車前方時(shí)、自車可以換道至目標(biāo)車道后車后方時(shí)三種情況。當(dāng)自車和目標(biāo)車在縱向上達(dá)到TTC閾值時(shí),令此時(shí)自車和目標(biāo)車的橫向距離為0。將從換道行為開(kāi)始到兩車橫向距離為0所需的時(shí)間t,以及自車橫向移動(dòng)的距離,帶入七次多項(xiàng)式軌跡方程,可求得總換道時(shí)間,將其帶入y(x)中即可得到軌跡。simulink中s文件代碼如下:
3 極限路徑
3.1 最快換道路徑
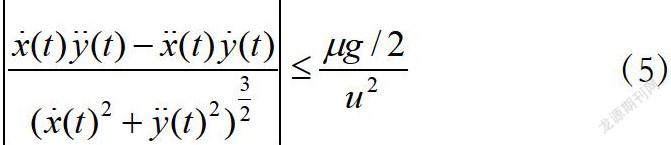
在目標(biāo)車道后車距離允許的情況下,以時(shí)間最短的方式完成換道。考慮到換道車輛的動(dòng)力學(xué)約束,在行駛途中若快速轉(zhuǎn)動(dòng)方向盤有可能會(huì)造成車輛發(fā)生側(cè)滑甚至是失控。所以要保證換道軌跡曲率在合適的范圍內(nèi),以不發(fā)生車輛側(cè)滑為最極限標(biāo)準(zhǔn)。而軌跡曲率最大的地方是最容易發(fā)生側(cè)滑的,所以只要令此時(shí)的曲率[7]小于此刻使車輛發(fā)生側(cè)滑的最小側(cè)向加速度[8]。式(5)中,μ為輪胎與地面之間的摩擦系數(shù);u為自車實(shí)時(shí)車速。
3.2 最慢換道路徑
因要求預(yù)警模型具有靈活、安全性,所以在換道過(guò)程中,極限換道邊界軌跡隨自車和目標(biāo)車運(yùn)動(dòng)狀態(tài)的變化而變化。
在換道過(guò)程中,采集到的實(shí)時(shí)自車與目標(biāo)車之間的碰撞時(shí)間,與已經(jīng)進(jìn)行換道行為的時(shí)間相加,再減去所對(duì)應(yīng)的TTC安全閾值后的,即得到最慢換道所需的換道時(shí)間。帶入y(x)即可規(guī)劃出最慢換道路徑。
4 換道場(chǎng)景
自車和目標(biāo)車之間能否可以追上或被追上,可用判定公式來(lái)判斷:
對(duì)于自車和目標(biāo)車道前車,Δ>=0,則自車可以追的上,否則追不上;對(duì)于自車和目標(biāo)車道后車,Δ>=0,則后車可以追的上自車,否則追不上。其中v0為自車車速,a0為自車加速度,v1為目標(biāo)車車速,a1為目標(biāo)車加速度,|Δd|為兩車縱向距離。
4.1 自車與目標(biāo)車道前車
(1)自車追不上目標(biāo)車道前車:目標(biāo)車道前車對(duì)于自車沒(méi)有威脅,只要在最快換道左側(cè),即不發(fā)生側(cè)滑就為安全;
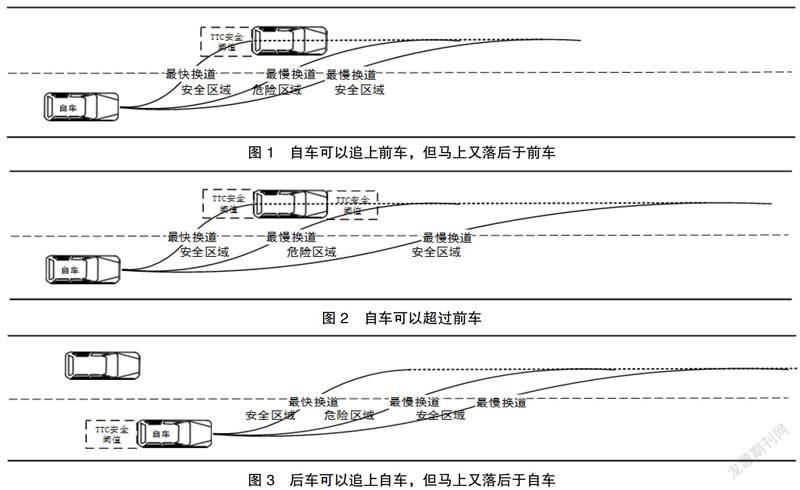
(2)自車可以追上目標(biāo)車道前車,但超不過(guò)前車:若保持直線行駛不換道(后同),自車車頭將會(huì)兩次觸及安全閾值界限,在第一次觸及之前和第二次觸及之后,才可以進(jìn)行安全換道(圖1);
(3)自車可以超過(guò)目標(biāo)車道前車:自車達(dá)到目標(biāo)車道前車后方的安全閾值界限前,和達(dá)到目標(biāo)車道前車前方的閾值后,為可以安全換道的區(qū)域(圖2)。
4.2 自車與目標(biāo)車道后車
(1)目標(biāo)車道后車追不上自車,自車對(duì)目標(biāo)車道后車不造成威脅,即只要自車不發(fā)生側(cè)滑即可;
(2)目標(biāo)車道后車可以追上自車,但超不過(guò)自車:目標(biāo)車道后車車頭將會(huì)兩次觸及安全閾值界限,所以在第一次觸及之前和第二次觸及之后,才可以進(jìn)行安全換道(圖3);
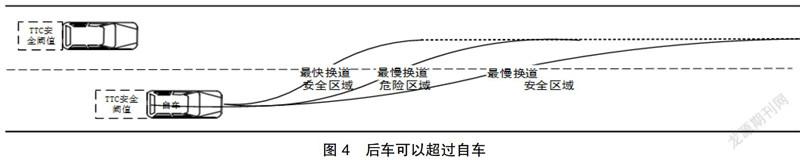
(3)目標(biāo)車道后車可以超過(guò)自車,目標(biāo)車道后車車頭將會(huì)兩次觸及安全閾值界限,所以在第一次觸及之前和第二次觸及之后,才可以進(jìn)行安全換道(圖4)。
4.3 自車與自車道前車
自車與自車道前車只要保持在自車與前車在縱向上恰好沒(méi)有重疊時(shí),兩車的橫向距離為零即可。本模型目前只考慮換道過(guò)程中的安全性,不考慮前車與自車的緊急避撞情況。
5 結(jié)語(yǔ)
通過(guò)本文提出的一種實(shí)時(shí)動(dòng)態(tài)的安全換道可行區(qū)域模型,在車輛行駛中,模型根據(jù)自車車速和其他車相對(duì)自車所在的位置,劃分出不同的安全范圍,當(dāng)自車的所處的位置不滿足任一安全范圍時(shí),模型預(yù)警,確保通行安全。
參考文獻(xiàn):
[1]肖獻(xiàn)強(qiáng),王其東,潘盛輝.基于視覺(jué)及TLC概念的車輛跑偏檢測(cè)方法研究[J].汽車工程,2010,32(1):77-80.
[2]Nelson W.Continuous-curvature Path for Autonomous Vehicles[C].IEEE International Conference on Robotics and Automation,1989:1260-1264.
[3]裴玉龍,張銀.車道變換期望運(yùn)行軌跡仿真[J].交通與計(jì)算機(jī),2008,26(4):68-71.
[4]徐慧智,裴玉龍,程國(guó)柱.基于期望運(yùn)行軌跡的車道變換行為安全性分析[J].中國(guó)安全科學(xué)學(xué)報(bào),2010(1):90-95.
[5]李傳友.高速公路環(huán)境下智能車輛自動(dòng)換道研究[D].長(zhǎng)安大學(xué),2019.
[6]王暢,付銳,張瓊,等.換道預(yù)警系統(tǒng)中參數(shù)TTC特性探究[J].中國(guó)公路學(xué)報(bào),2015,28(8):91-100.
[7]張新峰.基于穩(wěn)態(tài)轉(zhuǎn)向特性的智能車輛換道軌跡規(guī)劃[D].長(zhǎng)安大學(xué),2018.
[8]李傳友.高速公路環(huán)境下智能車輛自動(dòng)換道研究[D].長(zhǎng)安大學(xué),2016.