一種實現潮汕工夫茶藝過程的智能沏茶機設計
2021-09-10 07:22:44邱偉彬曾志豪李裕武黎維健劉宇星卿艷梅
機電工程技術 2021年2期
邱偉彬 曾志豪 李裕武 黎維健 劉宇星 卿艷梅









關鍵詞:茶藝;沏茶機;智能;自動化
0引言
潮汕家庭無論貧富,都愛好喝茶,龐大的茶葉消費群體,形成了一個巨大的茶葉消費市和獨特的潮汕工夫茶文化。工夫茶的沖泡過程復雜,其步驟大致分為燙杯熱罐、高沖低灑、關公巡城、韓信點兵。泡茶過程中的每一個步驟都極有講究,如“燙杯熱罐”和“高沖低灑”是為了充分散發茶葉的香味,“關公巡城”和“韓信點兵”是為了使茶汁平等均勻。
但是隨著社會節奏的加快,工夫茶并不能適應所有茶葉消費群體的需求,其考究的飲茶方式對時間和空間上均有較高的要求。為此,研制一種智能沏茶機,在具備自動沏茶功能的同時仍保持著傳統工夫茶文化技藝,顯得尤為必要。
國內外對自動泡茶裝置已經做了大量研究。太原理工大學研制出一種智能控制全自動沏茶機,實現了整個沏茶過程的工業化。2011年,雀巢公司推出了一款類似咖啡機的自動泡茶機。該機器具備自動沖泡功能,并能根據茶葉的種類來調節水溫及時間。上述研究都注重于實現沖泡過程的自動化,但是忽略了沖泡過程中的茶藝文化實現及茶具的清洗步驟。本文將針對國內外現有的自動泡茶裝置的不足進行改進,并結合傳統工夫茶藝文化知識,設計出一種實現潮汕傳統工夫茶藝的智能沏茶機。
1機械結構設計及工作過程
1.1整體方案
該智能沏茶機主要由5大部分組成,分別是出茶葉機構、茶壺控制系統、淋灌機構、茶盤機構及底盤。在這些機構的集成作用下,該機器可以實現加茶、沖茶、淋罐、泡茶、洗茶、燙杯、沏茶、洗杯、洗壺、清茶渣的動作,各個步驟聯動,全自動完成飲茶的準備工作及飲茶后的工作,其整體結構如圖1所示。
沏茶機的簡易工作流程如下。
(1)茶壺處于出茶葉機構下方,出茶葉機構接受相關命令后,根據用戶設定好的茶葉種類和茶葉量,開始出茶葉,實現“納茶”茶藝;茶壺接收茶葉后移至淋灌機構下,淋灌機構開始工作,加熱水泡茶,實現“高沖低灑”和“淋壺”茶藝;接著茶壺來到茶盤上方,茶壺蓋合上并開始倒茶。同時,茶盤轉動,使茶杯均勻得茶,完成“關公巡城”與“韓信點兵”茶藝;倒完之后茶杯翻轉,倒掉洗茶水完成洗茶工作。
(2)茶壺蓋打開,重復以上納茶之后的步驟,完成第二遍沖茶、第三遍沖茶直至沖茶結束。
(3)待結束沖茶時,茶盤旁的噴嘴出冷水清洗茶杯。同時茶壺回到出茶葉機構下方,導管往水壺中加冷水,茶壺旋轉以清理茶渣。
1.2出茶葉機構設計
出茶葉機構整體構成如圖2所示,其功能是可實現定量供給2種不同的茶葉以及檢測茶葉剩余量。
定量供給不同種類茶葉的功能由螺桿機構實現。該機構由單向離合器和復位彈簧、螺旋桿、外殼及傳動齒輪構成。螺旋傳動主要就是利用旋轉運動變換為直線運動。利用螺旋桿轉動帶動槽內茶葉向前傳遞,上方的儲茶器不斷地補充茶葉,保證連續出茶并通過控制螺桿轉動圈數來實現定量供給效果。單向離合器與復位彈簧聯合作用,保證只有一個方向可帶動螺桿(另一個方向空轉),結合電機正反轉,便可分別控制左右螺旋桿的轉動,實現供給不同種類的茶葉。而檢測茶葉剩余量的功能由壓力傳感器實現。
為滿足不同人群飲茶習慣的需求,對出茶葉量設計淡、適宜、濃3個檔次。考慮到通過理論計算一定容積內的茶葉質量涉及到容重、茶葉老嫩、條索緊實程度等多種數據的測量,不僅測量難度較大并且誤差較大,故采用直接測量法得到相關數據。讓螺桿轉動1圈,得到茶葉樣本(以茶葉鐵觀音為準),稱重得到數據mt。重復本實驗步驟,得到多組數據,取平均值,計算得到平均m=3.2g。查詢資料得,工夫茶沖泡中,每200mL水沖泡6g茶葉為宜。每次注水體積為160mL,則適宜茶葉用量x可由下列計算得到:由此整理濃度等級數據情況如表1所示。
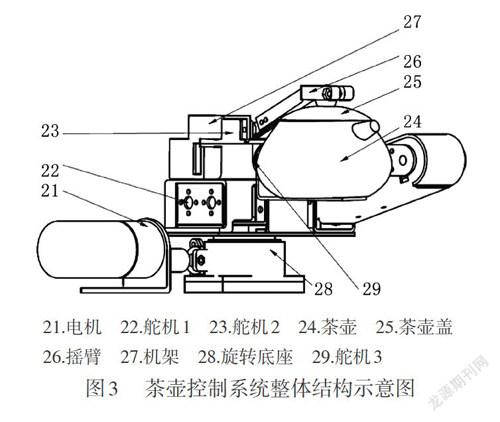
1.3茶壺控制系統設計
茶壺控制系統結構如圖3所示,其功能是控制移動茶壺到相應位置點,并實現茶壺蓋開合、茶壺的傾倒倒茶及翻轉清理茶渣等動作。
該裝置通過蝸輪蝸桿傳動來控制茶壺水平方向上的移動。蝸輪蝸桿傳動具有精度高、傳動穩定易于控制等特點,還能實現大傳動比。為此,本方案中采用蝸輪蝸桿傳動可有效降低傳動誤差,精確控制茶壺位置。另外,使用舵機分別控制茶壺蓋的開合、茶壺的傾斜、茶壺的翻轉。
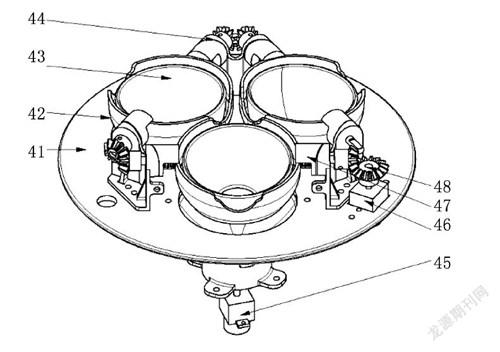
1.4淋灌機構設計
淋灌機構整體結構如圖4所示,其功能是實現傳統工夫茶藝中的“高沖低灑”及“淋壺”茶藝。
“高沖低灑”茶藝功能由圖中的絲桿傳動實現,變流器連接在絲桿上,可由電機驅動變流器的上下運動。絲桿上下端都設有行程開關,以確保控制的精確性。
“淋壺”茶藝功能由變流器實現,其結構原理如圖5所示。在高位時,水流經收束口直下,進入茶壺。在低位時,彈性擋片適應機架接觸面發生位移,擋住直下出口,水流開始分散到其余均勻分布的小口,實現淋灌壺身。
1.5茶盤機構設計
茶盤機構整體結構如圖6所示,其功能是旋轉茶盤實現茶藝“關公巡城”以及翻轉茶杯。
其中,茶盤的旋轉由電機直接驅動。茶杯翻轉機構原理如圖7所示。因彈簧作用,擋軸始終與機架接觸。擋軸尾部實質上是一個凸輪,凸輪與機架進行高副接觸,獲得預期的直線運動,在茶套翻轉時,擋住茶杯,防止掉落。電機驅動一個茶杯翻轉,其他茶杯由錐齒輪傳動系統發生同步同向翻轉。
1.6底盤設計
底盤結構如圖8所示。清洗槽用于收集洗茶壺的廢水廢渣,濾網過濾茶渣,防止堵塞導管。從機器外側可直接抽出濾網,清理茶渣,清洗槽的廢水都通過導管匯集到四通接口處,集中排出到廢水桶中。顯示屏及按鈕方便人工輸入相關指令信息。噴嘴用于沖茶結束時,對茶杯進行清洗。擋板可以防止沖茶過程中水的外濺。中間位置設有漏水孔,以防水殘留在底盤上,廢水同樣經導管排到廢水桶。管線收集盒用于匯聚導管導線等,避免纏繞雜亂。
2電氣控制系統設計
在電氣控制方面,在實現機器全部功能的前提下,需盡量做到簡潔高效,并符合常人的操作習慣,遵循可行性、合理性、相容性的原則,以下將從各個方面詳細介紹。
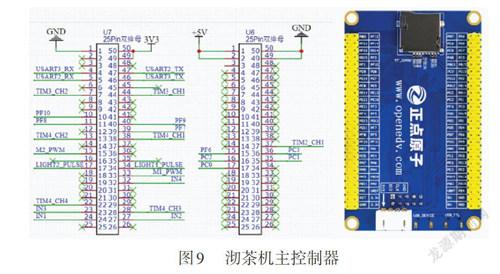
2.1控制模塊
控制該沏茶機的核心部件如圖9所示。茶機上的按鈕和手機端的藍牙通過串口通信與主控芯片進行通信;藍牙無線傳輸通過RF(2.4 GHz)載波進行功耗低,傳輸速度快,可同時連接多個系統。當裝置通電,主控芯片即完成對裝置電機和串口的初始化,當主控芯片接收到藍牙或按鍵的“開始”信號即開始自動泡茶,在此期間用戶可以“重復沖茶”、“清洗茶具”、“停止”等按鈕進行人機交互,實現相應操作。
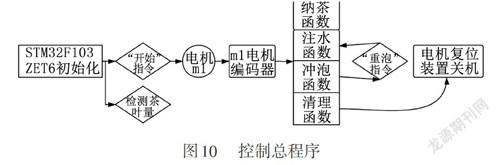
2.2程序設計總思路
沏茶機控制總程序如圖10所示。該總程序有m1茶壺橫向轉動子程序、m2出茶電機子程序、m3壺蓋翻轉子程序、m4茶壺垂直翻轉子程序、m5茶壺橫向翻轉子程序、m6絲桿電機子程序、m7抽水電機子程序、m8茶盤電機子程序、m9茶杯翻轉電機子程序。程序分為納茶函數、注水函數、沖泡函數、清理函數、檢測茶葉量函數幾大模塊。
2.3茶壺橫向轉動子程序
編碼器電機能機械位置同步跟蹤,各個函數以ml電機編碼器S1\S2\S3\S4返回值作為主人口參數,自增值Flag為次人口參數,如圖11所示。
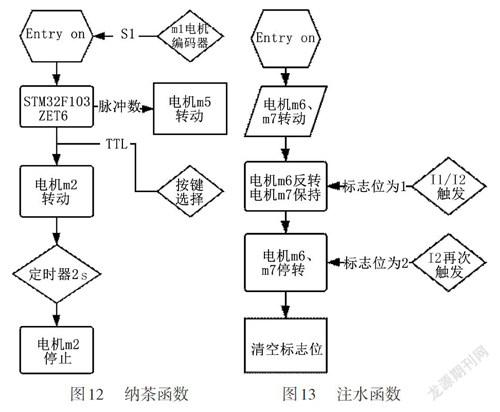
2.4納茶函數設計
該函數實現茶葉進入茶壺動作。主控芯片輸入脈沖數,電機m5轉動,茶壺翻轉180°;按鈕選擇m2出茶子程序電機轉動,螺桿出茶,定時器2s后結束,如圖12所示。
2.5注水函數設計
該函數實現茶壺淋壺和注水動作。絲桿上下固定有11和12限位開關,被觸發時實現m6電機反轉;電機m6、m7轉動,P1注水口注水同時向上移動,上方限位開關12被觸發2次即停止,如圖13所示。
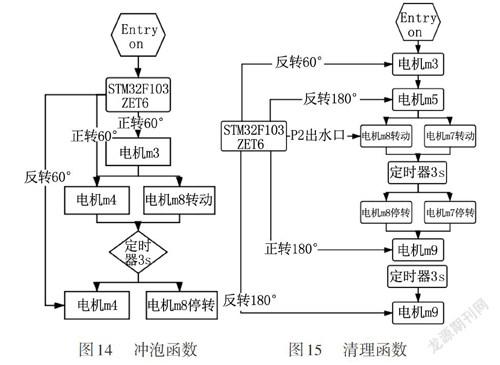
2.6沖泡函數設計
該函數實現茶水從茶壺注入茶杯。電機m3轉動至內部壓力傳感器觸發而停止,帶動蓋子合上;電機m4轉動,帶動茶壺傾斜俯角60°,使茶水倒入茶杯中,與此同時,電機m8轉動,使茶盤轉動,確保每個茶杯中倒人茶水;定時器5s后,電機m4翻轉,茶壺回到水平狀態,電機m8停止,茶盤停轉,如圖14所示。
2.7清理函數設計
該函數實現茶杯茶壺清理。電機m3反轉60°,打開壺蓋;電機m5轉動,帶動茶壺橫向翻轉180°,茶渣掉落。電機m7、m8轉動,選擇P2注水口注水,定時器3s后停止,電機m9轉動,翻轉茶杯,轉動180°后,電機反轉,茶杯復位,如圖15所示。
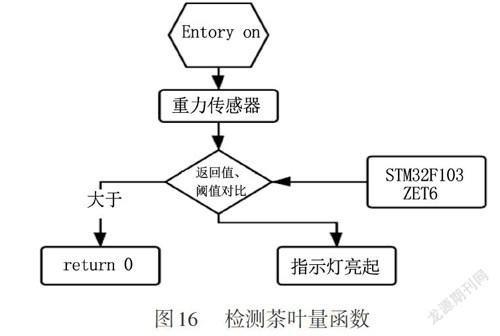
2.8檢測茶葉量函數設計
該函數實現茶庫中茶葉量過少自動通知用戶添加茶葉。重力傳感器返回值,少于設定閾值,添加茶葉指示燈亮起,如圖16所示。
2.9重要電機控制簡述
M1編碼器電機作為其他函數人口,要確保其準確控制,實現裝置的正常運行。對此,經行PID算法的閉環控制,公式表達為:
由此可以實現對編碼器電機的閉環控制,如圖17所示。
3關鍵機構分析
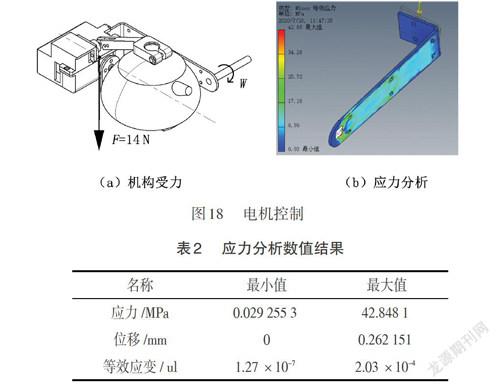
針對茶壺傾倒機構,關鍵部位在于L型鈑金懸臂梁的受力情況,以及翻轉扭矩是否足夠。以下將使用Inventor運動仿真及應力分析插件進行分析。
3.1茶壺L型鈑金的應力分析
懸臂梁末端受力為機構總重力,測得該力FI=14N。將前端做固定約束,選擇材料為鍍鋅鋼,網格劃分后計算得到以下結果。如圖18、表2所示。表2結果表明,懸臂梁末端發生的最大位移為0.26mm,在允許的范圍內。
3.2茶壺翻轉傾倒的仿真運動分析
茶壺傾倒過程中(受力情況如圖18(a)所示),初始力F,=14N,由于傾倒過程中水的重量減少,末位置的力減少為F2=11N。擬定該力呈線性變化,添加后計算得到茶壺翻轉力矩結果,如圖19所示。
由圖可知,最大力矩Wo=1481.37N·mm,其中齒輪傳動系統減速比為1:1.4。故作用在舵機上的力矩W為:
4結束語
本文設計的一種實現潮汕傳統工夫茶茶藝過程的智能沏茶機,結構簡潔、功能多樣,實現了清洗茶具、裝茶葉、洗茶葉、泡茶、倒茶等功能的自動化,其動作過程模擬了潮汕傳統工夫茶藝的人工過程。在控制方面,能及時反饋茶葉剩余量,且擁有遠程控制等智能化設計。相比較于其他簡單沖泡的茶具,本設計具有良好的市場前景。
猜你喜歡
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
中國科技博覽(2016年19期)2016-10-19 14:47:24
中國科技博覽(2016年19期)2016-10-19 13:40:37
中國科技博覽(2016年18期)2016-10-19 07:01:13
中國市場(2016年36期)2016-10-19 03:40:15
