一種車載移動(dòng)式安檢安防系統(tǒng)結(jié)構(gòu)設(shè)計(jì)
2021-09-10 04:40:25韋巍盧明劉杭
內(nèi)燃機(jī)與配件 2021年5期
韋巍 盧明 劉杭


摘要:本文針對(duì)車載移動(dòng)式安檢安防系統(tǒng)的設(shè)計(jì)要求,集成多種安檢手段,實(shí)現(xiàn)對(duì)被檢人員的全方位安檢,并充分借鑒民用房車的設(shè)計(jì)思路,對(duì)整個(gè)安檢艙進(jìn)行合理布局,滿足被安檢人員在一條合理的動(dòng)線上進(jìn)行安檢,最大限度提高安檢效率。本文詳細(xì)闡述了系統(tǒng)總體設(shè)計(jì)、擴(kuò)展機(jī)構(gòu)詳細(xì)設(shè)計(jì)以及調(diào)平撐腿詳細(xì)設(shè)計(jì)等三方面設(shè)計(jì)內(nèi)容,并采用力學(xué)分析手段,對(duì)安檢艙骨架進(jìn)行了強(qiáng)度與變形量的校核。系統(tǒng)實(shí)際工程研制完成后,性能穩(wěn)定可靠,指標(biāo)滿足總體要求。
關(guān)鍵詞:車載移動(dòng)式;安檢安防;擴(kuò)展機(jī)構(gòu);調(diào)平系統(tǒng)
中圖分類號(hào):TP302? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)識(shí)碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號(hào):1674-957X(2021)05-0196-02
0? 引言
太赫茲技術(shù)作為近年來(lái)興起的新興技術(shù),逐步使用于安檢領(lǐng)域[1]。被動(dòng)式太赫茲成像技術(shù)[2],是利用捕捉人體自身發(fā)射的太赫茲波,進(jìn)行處理分析并成像的技術(shù),該技術(shù)由于是捕捉人體自身所發(fā)射的太赫茲波,故設(shè)備本身不產(chǎn)生任何輻射,該技術(shù)不僅可檢測(cè)金屬物質(zhì),還可檢測(cè)陶瓷、粉末、液體等各類非金屬物質(zhì)。
本文所描述車載移動(dòng)式安檢安防系統(tǒng),是基于太赫茲人體安檢技術(shù),并結(jié)合X光機(jī)、人證比對(duì)、視頻監(jiān)控以及人臉識(shí)別等安檢安防技術(shù),形成一套高集成度、多功能的安檢安防系統(tǒng),該系統(tǒng)可快速部署與撤收,可靈活運(yùn)用于各類大型活動(dòng)的臨時(shí)安檢保障工作。
1? 結(jié)構(gòu)總體設(shè)計(jì)
本系統(tǒng)在總體布局方案中,統(tǒng)籌考慮各類限制性標(biāo)準(zhǔn)文件所規(guī)定的邊界條件(運(yùn)輸要求、外形包絡(luò)、重量等),并結(jié)合實(shí)際使用需求,進(jìn)行了自上而下的系統(tǒng)設(shè)計(jì)。整個(gè)系統(tǒng)考慮了成本、使用方式、維修性以及現(xiàn)場(chǎng)布置難易程度后,選擇了牽引車拖拽拖掛車的整體結(jié)構(gòu)形式,拖掛車采用中置軸布局,整個(gè)拖掛車重量需控制在3500kg以下,拖掛車便可使用撞剎作為制動(dòng)結(jié)構(gòu),以簡(jiǎn)化拖掛車結(jié)構(gòu)設(shè)計(jì)。系統(tǒng)運(yùn)輸狀態(tài)如圖1所示。
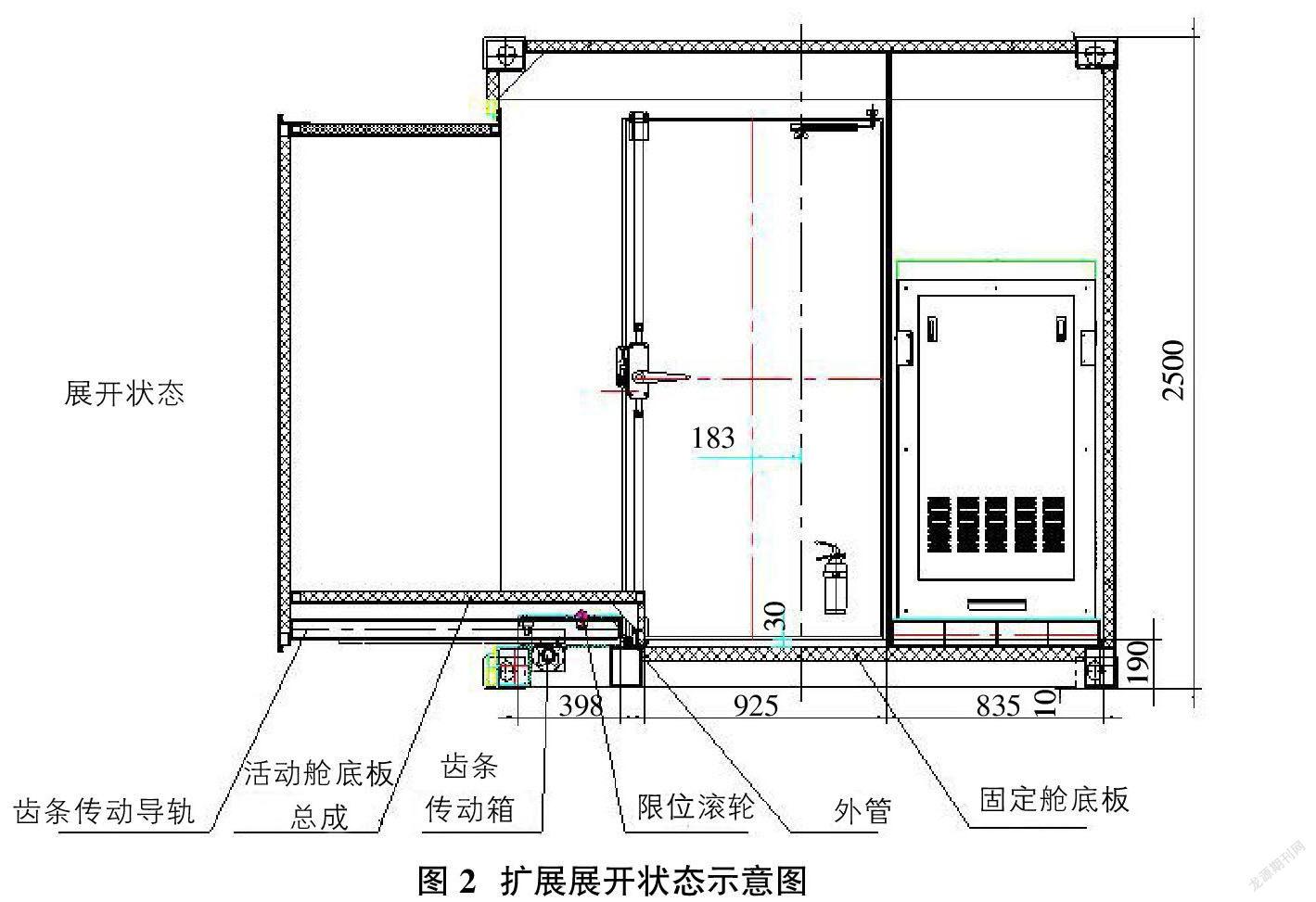
車載移動(dòng)式安檢安防系統(tǒng)根據(jù)功能劃分為運(yùn)輸車與拖掛車兩部分,其中,拖掛車系統(tǒng)又分為安檢艙與運(yùn)輸平臺(tái)兩部分,安檢艙為整個(gè)系統(tǒng)核心組成部分。安檢艙四周通過(guò)角件安裝電動(dòng)調(diào)平撐腿,實(shí)現(xiàn)安檢艙的自動(dòng)裝卸與調(diào)平,安檢艙卸下過(guò)程如圖2所示。待拖掛車移動(dòng)至指定地點(diǎn)后,給安檢艙通電,使用調(diào)平撐腿將安檢艙撐起后,將拖掛車架抽出,最后將電動(dòng)撐腿收攏,完成一次卸艙,裝艙過(guò)程與上述過(guò)程相反。
2? 關(guān)鍵技術(shù)
2.1 擴(kuò)展機(jī)構(gòu)詳細(xì)設(shè)計(jì)
本系統(tǒng)設(shè)計(jì)要求安檢艙采用單側(cè)擴(kuò)展形式,以增加艙內(nèi)使用面積,擴(kuò)展艙單側(cè)潮外擴(kuò)展距離為800mm,擴(kuò)展艙負(fù)載為600kg,擴(kuò)展艙擴(kuò)展后,擴(kuò)展艙與主艙重疊部分為400mm,該結(jié)構(gòu)為懸臂受力結(jié)構(gòu),擴(kuò)展艙擴(kuò)展后展開(kāi)狀態(tài)如圖2所示。
本系統(tǒng)擴(kuò)展機(jī)構(gòu)設(shè)計(jì)考慮負(fù)載、穩(wěn)定性、環(huán)境適應(yīng)性后,選擇齒輪齒條傳動(dòng)方式,配合導(dǎo)軌與行程開(kāi)關(guān)實(shí)現(xiàn)擴(kuò)展動(dòng)作。
對(duì)擴(kuò)展機(jī)構(gòu)電機(jī)選型計(jì)算如下:擴(kuò)展系統(tǒng)承載質(zhì)量取M=1500kg,初定平移平均速度V=3.6m/min,加速時(shí)間t1為1s,選用模數(shù)M=3、齒數(shù)Z=20的齒輪配合相應(yīng)的齒條作為平移驅(qū)動(dòng),齒輪傳動(dòng)效率比η=0.98。防護(hù)罩整體依靠?jī)蓚?cè)平行導(dǎo)軌承重,預(yù)估摩擦系數(shù)取μ=0.01。
滑軌摩擦力F=M×g×μ=1500×10×0.01=1500N
加速力Fa=M×a=1500×0.06=90N(a=V/t1)
合力Fh=1500+90=1590N
齒輪分度圓直徑D=M×Z=60mm
啟動(dòng)力矩T=Fh×D/2=1590×0.03=47.7N·m
齒輪轉(zhuǎn)速n1=V/π D=3.6/0.06π=19.12r/min取n1=20r/min
現(xiàn)根據(jù)伺服電機(jī)額定轉(zhuǎn)速n2=2000r/min
得出減速比i=n2/n1=100? 取i=100(利于產(chǎn)品選型)
減速機(jī)輸入端(伺服電機(jī))加速轉(zhuǎn)矩
Td=T/ i·η=47.7 /(100×0.98)=0. 487N·m
伺服電機(jī)功率PG=Td×n2 / 9550=0.1kW。考慮實(shí)際裝配間隙等問(wèn)題,選用200W伺服電機(jī)。
隨后對(duì)擴(kuò)展系統(tǒng)直線導(dǎo)軌承載進(jìn)行校核:擴(kuò)展艙及X光機(jī)設(shè)計(jì)質(zhì)量為910kg,擴(kuò)展系統(tǒng)設(shè)計(jì)承載質(zhì)量為1500kg。
擴(kuò)展艙伸出后力矩為:
M擴(kuò)=1500×9.8×0.36N·m=5292N·m
單套直線導(dǎo)軌組承載力矩為M=2646N·m,單套直線導(dǎo)軌設(shè)置3個(gè)滑塊。本次選用直線導(dǎo)軌單個(gè)滑塊負(fù)載力為MA=2680N·m>2646N·m,負(fù)載能力滿足要求。
2.2 電動(dòng)撐腿設(shè)計(jì)
本系統(tǒng)除去底盤外、艙體總重為2.8t,使用4個(gè)調(diào)平撐腿,實(shí)現(xiàn)艙體升降與調(diào)平功能,因此艙體升降行程較大,為防止升降過(guò)程出現(xiàn)由于撐腿不同步,導(dǎo)致的安檢艙側(cè)傾甚至側(cè)翻風(fēng)險(xiǎn),在安檢艙底部安裝水平傳感器,實(shí)時(shí)對(duì)信號(hào)進(jìn)行反饋,使得撐腿可自動(dòng)進(jìn)行姿態(tài)調(diào)整,保證安檢艙順利進(jìn)行升降。
調(diào)平撐腿考慮運(yùn)輸時(shí)道路運(yùn)輸限款2.5m,故設(shè)計(jì)為回轉(zhuǎn)式,運(yùn)輸狀態(tài)時(shí),調(diào)平撐腿回收至安檢艙寬度范圍內(nèi),使用狀態(tài)時(shí),旋轉(zhuǎn)展開(kāi)至安檢艙寬度范圍外,并設(shè)計(jì)鎖緊機(jī)構(gòu),使得無(wú)論出于運(yùn)輸狀態(tài)還是使用狀態(tài),調(diào)平撐腿均可保持穩(wěn)固。單調(diào)平支腿用于支撐和調(diào)整安檢艙高度,具備到位限位、自鎖等功能。單個(gè)電動(dòng)調(diào)平腿主要由伺服電機(jī)、減速器、傳動(dòng)齒輪組、T型絲桿、套筒、傳感器等組成,結(jié)構(gòu)可保證機(jī)械自鎖,內(nèi)部結(jié)構(gòu)如圖3所示。
3? 安檢艙骨架力學(xué)分析
由于拖掛車總重量不得超過(guò)3500kg,故控制艙體骨架重量為保證設(shè)計(jì)要求最為行之有效方式,這樣即對(duì)安檢艙的材料使用、強(qiáng)度等指標(biāo)提出了很高的要求。本系統(tǒng)安檢艙廂體大板采用加筋復(fù)合大板制作技術(shù),為保證艙體調(diào)平升舉及吊裝強(qiáng)度,底壁板骨架采用鋼制封閉框架結(jié)構(gòu),選用4mm厚寶鋼750鋼板材料,為減輕車廂重量,頂部及側(cè)部壁板采用40mm×50mm鋁合金矩形管為主骨架材料。所有壁板骨架均采用大跨度斜拉結(jié)構(gòu),減少短橫梁數(shù)量,并在底壁板骨架縱梁立面加工減重孔。
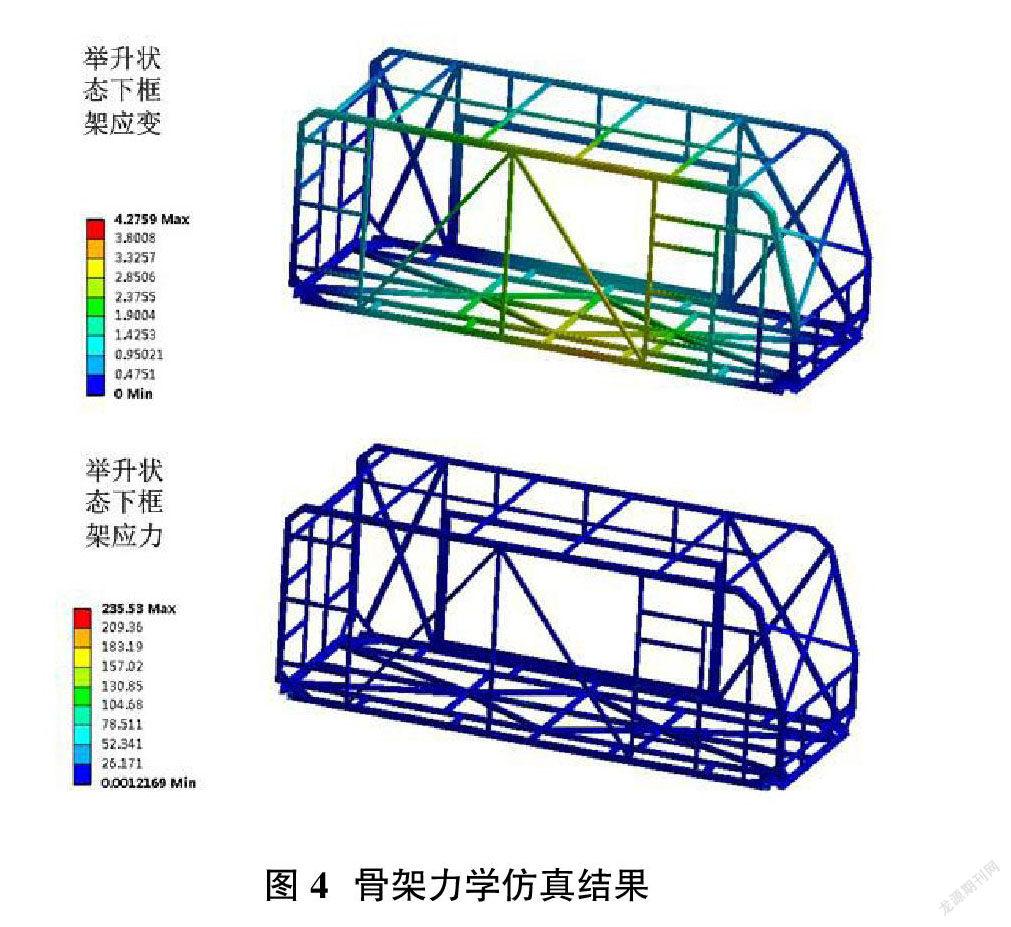
四點(diǎn)調(diào)平舉升為最惡劣工況,按此工況對(duì)底骨架模型做受力分析,進(jìn)行仿真計(jì)算,結(jié)果如圖4所示。從仿真結(jié)果來(lái)看,骨架受力處由于使用了高強(qiáng)鋼板,使得加載后,整體骨架變形為4.2mm,滿足設(shè)計(jì)要求,最大應(yīng)力為235MPa,在底骨架處,遠(yuǎn)小于寶鋼750鋼板材料屈服應(yīng)力值。除底骨架外,其余部分使用鋁合金,使得整個(gè)骨架重量控制在900kg,從而滿足總體指標(biāo)要求。
4? 結(jié)語(yǔ)
結(jié)合車載移動(dòng)式安檢安防系統(tǒng)的研制,本文從結(jié)構(gòu)總體設(shè)計(jì)、擴(kuò)展機(jī)構(gòu)設(shè)計(jì)、電動(dòng)撐腿設(shè)計(jì)以及安檢艙骨架設(shè)計(jì)等重要方面進(jìn)行了闡述,并對(duì)各傳動(dòng)機(jī)構(gòu)的詳細(xì)設(shè)計(jì),以及骨架的力學(xué)性能做了詳細(xì)的設(shè)計(jì)分析,實(shí)現(xiàn)了系統(tǒng)功能與結(jié)構(gòu)設(shè)計(jì)指標(biāo)。系統(tǒng)整機(jī)實(shí)際工程研制完成后,狀態(tài)穩(wěn)定,性能可靠,綜合指標(biāo)與功能性均能較好滿足設(shè)計(jì)要求,對(duì)類似移動(dòng)式安檢安防系統(tǒng)研制工作具有一定的參考意義。
參考文獻(xiàn):
[1]武帥.太赫茲技術(shù)應(yīng)用進(jìn)展[J].電子技術(shù)應(yīng)用,2019(7):3-7,18.
[2]范殿梁.車載移動(dòng)式太赫茲綜合安檢系統(tǒng)的設(shè)計(jì)與應(yīng)用[J].中國(guó)安全防范技術(shù)與應(yīng)用,2018(6):9-11.
[3]高炳西,馮輝.太赫茲人體安檢關(guān)鍵技術(shù)及應(yīng)用[J].警察技術(shù),2016(03):23-26.