基于北斗/4G的小型通信裝置設計
2021-09-10 02:18:32馬路平王英立于邦偉夏紀洋劉珂鑫王浩淼
傳感器世界 2021年7期
馬路平 王英立 于邦偉* 夏紀洋 劉珂鑫 王浩淼
1.哈爾濱理工大學學生創新實驗室,黑龍江哈爾濱 150000;2.哈爾濱理工大學測通學院通信工程系,黑龍江哈爾濱 150000
0 引言
傳統的車載定位系統價格昂貴,有時定位不準,并且用戶無法直接查看設備的運行狀態。在傳統的定位設備應用場景下,經常會有司機因無法自檢,不知道設備失靈而受到相關處罰。如果能開發出一種可以自己檢查設備是否失靈,并且可以將位置信息通過短信發送至用戶手機的設備,將給用戶帶來極大的方便。本設計以STM32為主控芯片,結合北斗模塊和4G模塊實現了定位和通信功能;結合紅外模塊和超聲波模塊實現了避障功能。
1 系統方案
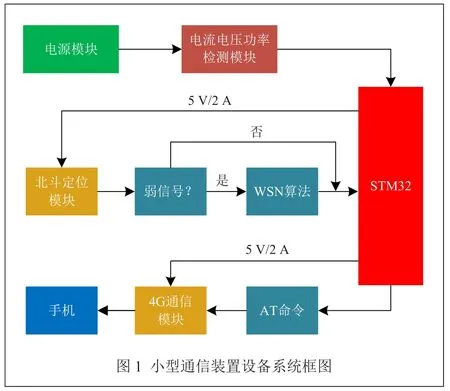
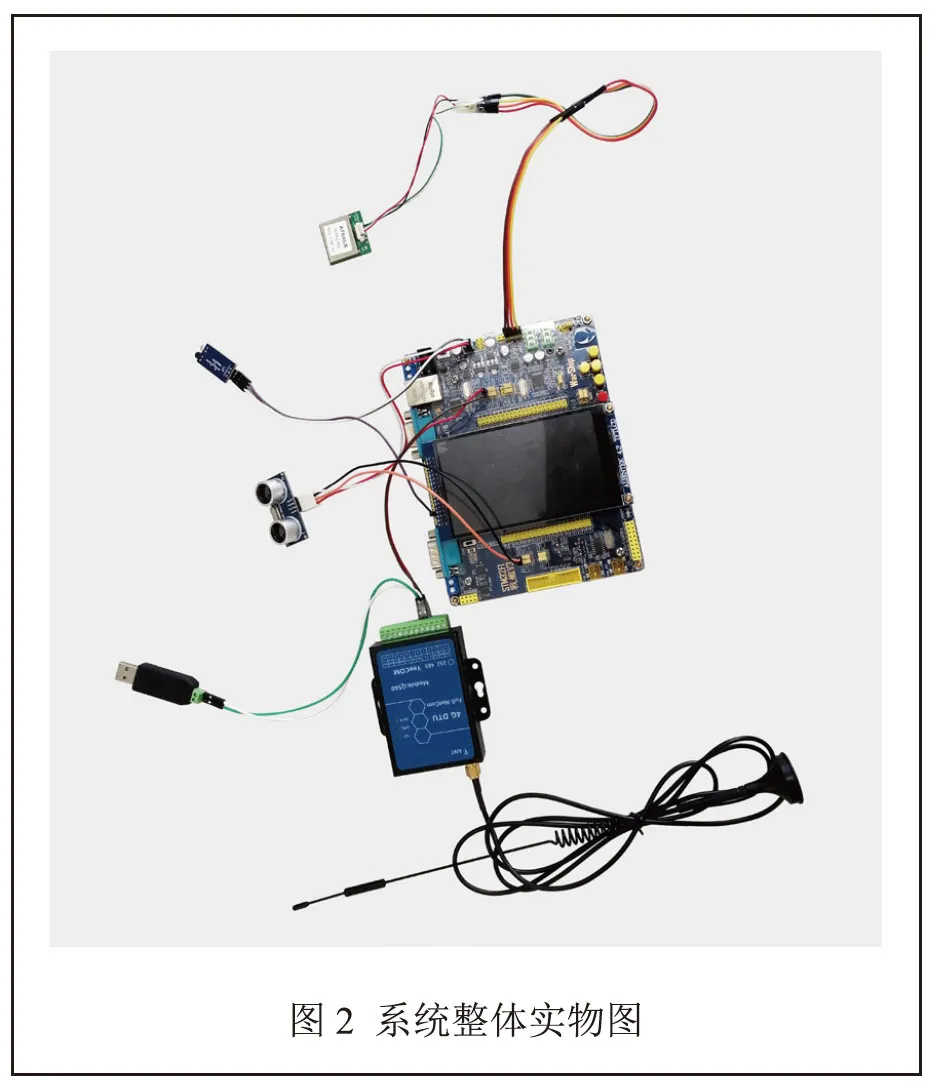
小型通信裝置主要由電源模塊、衛星定位模塊、4G通訊模塊、超聲波模塊以及紅外模塊組成。當需要獲取目標裝置信息時,衛星定位模塊將獲得的目標位置信息傳送給CPU,4G模塊按照CPU指令將目標位置信息發送給手機。避障模塊由紅外模塊和超聲波模塊組成,當避障模塊檢測到障礙物時,將障礙物信息傳送給CPU,CPU按照既定程序發出相應指令。設備整體結構如圖1所示。主控模塊CPU用來接收、處理其他模塊采集到的信號;4G通訊模塊用來發送經CPU處理過的數據到目標手機。系統整體實物圖如圖2所示。
系統設計以下功能:
(1)系統可即時獲取目標設備位置信息并發送至目標手機;
(2)系統可以自行躲避障礙物。
2 系統設計
2.1 單片機最小系統
單片機最小系統主要由主控芯片、功率調節器、串口通信電路、按鍵、LED燈組成。
本次設計采用的主控芯片是STM32F1系列芯片,具有高速率、低成本、低功耗、耐用等優點[1]。
2.2 電源模塊
電源模塊采用大容量、高性能的鎳鋰電池給整個系統供電,輸出電壓為5 V,最大輸出電流為5 A,可滿足4G發射時的最大電流(2 A)和北斗-GPS發射時的最大電流(2 A)的需求[2],額定容量14,000 mAh。穩壓模塊通過檢測電壓電流值,將數值傳輸到STM32,STM32再根據修正值控制調壓器調壓。
2.3 定位模塊
本系統采用ATK1218-BD模塊進行定位。該模塊定位精度高,冷啟動時間短,通信速率高,尺寸小,與NEO-6M模塊相比,具有成本低、GPS+北斗雙模、更新速率快等優勢。
無線傳感器網絡技術(wireless sensor network,WSN)是物聯網技術的一種,是綜合了包括傳感器技術、現代網絡技術及無線通信技術在內的多種技術于一體的感知及傳輸系統[3]。WSN算法是在定位唯一性約束關系下能夠求解網絡中任意節點位置的一種有效算法。
2.4 4G通訊模塊
本系統采用QUECTEL EC20 CEHDLG作為通訊模塊,該模塊采用LTE3GPP Rel.11技術,支持的最大下行速率為150 Mbps,最大上行速率為50 Mbps,同時在封裝上兼容EC20 R2.1 Mini PCle-C模塊,并能夠向后兼容現存的EDGE和4G/GPRS網絡,以確保在缺乏3G和4G網絡的偏遠地區也能正常工作。通過AT指令集實現4G全網通的各種功能,4G通信模塊需要外接SIM卡才能實現數據遠程傳輸,經UART接口與STM32處理器連接后可以實現與主控板間的近距離數據傳輸。
由于該模塊可以實現4G通信,所以可通過短信方式獲取當前設備的位置信息。在需要自查設備故障時,通過AT命令獲取本設備的位置信息與實際情況對比,即可判斷系統是否發生故障。
2.5 避障模塊
本系統采用紅外模塊和超聲波模塊進行避障,具有較高的準確度,并且容易實現。在設計上采用紅外避障模塊與超聲波模塊,2種方案同時檢測,并依據兩者測得的距離為轉向角提供數據[2]。
2.5.1 紅外模塊
紅外模塊具有信號發射二極管與信號接收二極管,發射管發射一定頻率的紅外信號,接收管接收這種信號,紅外信號遇到障礙物被反射到傳感器接收頭,傳感器檢測到這一信號就可以確認正前方有障礙物[4]。經過處理后,通過數字傳感器接口返回到主機,主機即可利用紅外波的返回信號來識別周圍環境的變換,進而做出判斷。
2.5.2 超聲波避障模塊
超聲波電路采用集成電路CX20106A[5]。超聲波測距模塊的超聲波頻率為40 kHz。該模塊具有很高的靈敏度和較強的抗干擾能力,可以適當改變C1的大小,從而改變接收電路的靈敏度和抗干擾能力。電壓放大倍數隨測距距離的增大呈指數規律增加,使接收回波的幅值保持恒定或者僅在較小范圍內變化,再經過整形電路輸出,可大幅度地提高測距精度[5]。
3 系統工作流程
系統工作流程如圖3所示。開機后,STM32F1單片機主控芯片、4G通信網絡、衛星定位模塊系統初始化,當需要知道當前目標設備的位置信息時,CPU通過讀取衛星定位模塊位置信息,然后通過4G通信模塊發送AT命令給SIM卡(手機),當避障模塊檢測到有障礙物時,反饋數據給CPU,然后CPU根據數據給出相應的避障命令。

4 數據測量
本系統運行所得關鍵數據為位置與速度信息。測試用的上位機為naviTrack,可以測量當前位置能夠接收衛星信號的數量、經緯度、速度等信息。經多次實驗,最終在哈爾濱理工大學校內4個不同位置測量并記錄了相關信息。上位機獲得的數據如圖4~圖7所示。





5 避障實驗
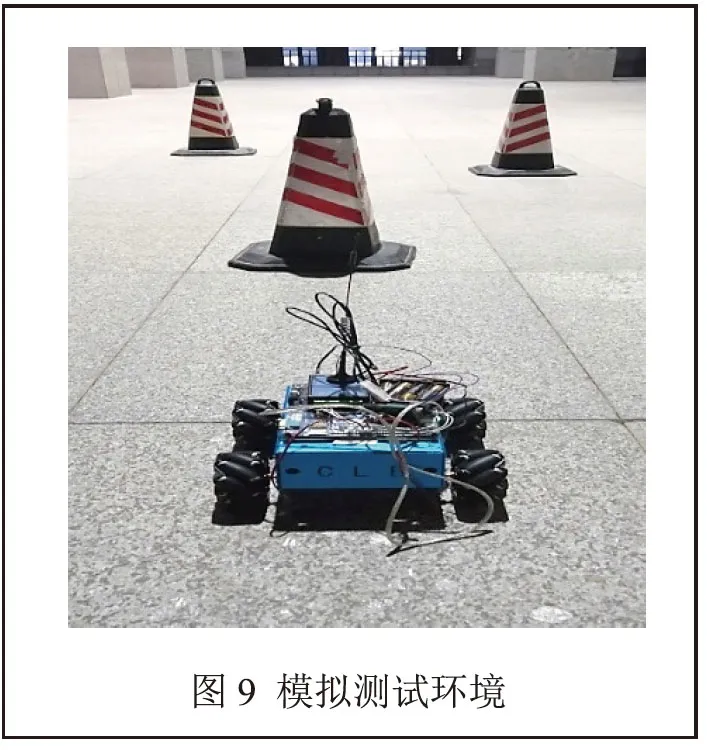
小車實物如圖8所示。測試小車避障功能,構建一個模擬環境,如圖9所示。將小車放入起點位置,使小車勻速前進,測試小車成功躲避障礙物的次數N以及每次成功到達終點所用的時間T,本次實驗測試10次,并記錄實驗數據,實驗結果如表1所示。

表1 實驗結果
10次避障實驗中,小車有7次成功躲避障礙物,到達終點,3次失敗,從測試時間來看,小車從起點到達終點的時間大概在50 s左右。
6 總結
基于北斗/4G技術的小型通信裝置,以STM32F1單片機為主控制器,以ATK1218-BD為定位模塊,4G網絡為通信載體,實時監控目標裝置的位置信息,實現了目標位置隨查隨知。系統還配備了紅外模塊和超聲模塊組成避障模塊,實現了基礎的避障功能。經過測試,系統操作簡單,比較穩定,成本低。今后將在提高避障的精確度方面進一步改進。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
工業設計(2016年12期)2016-04-16 02:52:00
中外會展(2014年4期)2014-11-27 07:46:46
消費者報道(2014年7期)2014-07-31 11:23:57
