雙支架葉片凈空監測系統相對誤差優化
2021-09-06 07:47:12馮駒
中國科技縱橫 2021年13期
馮駒
(明陽智慧能源集團股份公司,廣東中山 528437)
0.引言
隨著風力發電技術的發展及能效要求的提高,風機葉片越來越長、越來越柔,風力發電機的葉片凈空監測系統應運而生,用于監測葉尖凈空[1]。雙支架葉片凈空監測系統在設計階段采用冗余設計和相互校驗的設計,減小出現偶然誤差影響,但是在實際應用中雙雷達的相互校驗出現的校驗失敗故障影響風力發電機組的正常工作,降低風力發電機組的實際發電量。為降低風力發電機組凈空校驗失敗的可能,需對該系統的凈空監測進行優化。
1. A風場誤差
A風場在2021年5月初出現較大規模的距離校驗失敗故障,即測距儀獲取的數據與凈空曲線之間的誤差較大,大于理論誤差范圍。針對距離校驗失敗故障數據進行采集,獲取距離校驗失敗故障發生期間的高頻數據。
將A風場12號至17號風機在故障發生期間的數據進行統計,篩選出1號雷達的凈空值和2號雷達的測量值小于90m的數據,篩選出1096個符合要求的數據,對于12號風機至17號風機之間的數據進行對比,15號風機的分布相較于其余的數據約大0.5m,經過現場檢查15號風機的激光光斑的誤差約為30cm,考慮到左右的調節為有級調節實際誤差應大于30cm,因此15號風力發電機組相較其余風力發電機組的誤差大0.5m~0.6m,故應剔除15號風機的故障數據。
剔除掉15號風力發電機組的無效數據后,將數據篩選出828個有效數據,數據如表1所示分布主要的數據集中在0.6~0.8之間,平均值為0.717,標準差為0.168,數據相對集中。

表1 A風場風機凈空較低期間誤差
將數據進行篩選后,按照0.5的閾值要求下的數據的概率為7.6%。將閾值放大到0.9之后,小于0.9的數據的占比為84.1%,放大到1之后,小于1的數據占比為92.1%。即現有的閾值設為0.5之后,閾值相對較為狹窄,92.4%的數據均認為錯誤,錯誤概率較大。考慮到凈空雷達存在0.3m的誤差,實際的閾值可能會縮至0.35m,若將現有閾值添加誤差至0.8m的范圍,75%的數據滿足實際需求。
2. B風場誤差
B風場是一個典型的山地風場,B風場的風資源分布相對不均勻且存在較為明顯的負切變,葉尖處的風速與葉根處的風速差距相對較大,B風場的風資源分布分層嚴重,采集到的風速數據對B風場凈空數據分析相關性較弱,不作為研究葉尖凈空差值的相關關系。
將B風場的故障數據進行篩選,篩選出凈空值低于有效值的數據后,篩選出231個有效數據,數據如表2分布。B風場凈空數據與A風場分布相同,B風場的差值平均值為0.67,標準差為0.21。
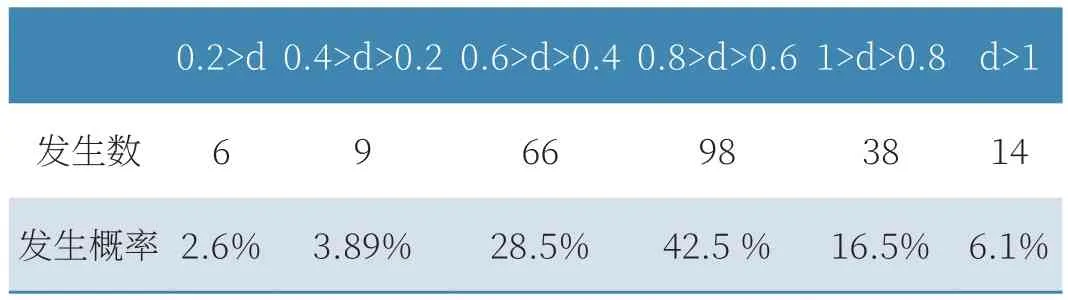
表2 B風場風機凈空較低期間誤差
將數據進行篩選后,按照0.5的閾值要求下的數據的概率為14.7%。將閾值放大到0.9之后,小于0.9的數據的占比為92.6%,放大到1之后,小于1的數據占比為93.9%。即現有的閾值設為0.5之后,閾值相對較為狹窄,85.3%的數據均認為錯誤,錯誤概率較大。結合第二節對誤差的討論,將現有閾值添加誤差至0.8m的范圍,77.5%的數據滿足實際需求。
3.距離校驗失敗原因
風力發電機凈空監測系統距離校驗失敗時的主要原因有4點。(1)葉片強度誤差;(2)風力環境差異;(3)凈空雷達安裝誤差;(4)凈空雷達隨機誤差。
3.1 葉片強度誤差
A風場與B風場所使用的葉片有一定區別,B風場所使用是2號葉片相較與A風場所使用的1號葉片更柔。葉片凈空監測系統的理論設計是基于B風場的2號葉片與所處的風力環境進行設計,B風場的1號雷達標準測距值的葉尖凈空為6.7m,A風場的1號雷達標準測距值的葉片凈空為7.15m。A風場相較與B風場的距離差值約為0.4m與兩風場的葉片變形仿真值的0.45m誤差相對接近,理論凈空值與實際凈空值誤差較小。
3.2 風力環境差異
因目前采集數據的兩個風場僅采用了風速風向儀對風速進行數據采集,風向風速數據滯后于凈空監測數據,同時B風場又屬于一個典型的負切變的山地風場,風速風向數據對凈空數據誤差數據關聯性較弱,不納入主要影響因素。實際控制中若風速數據失效,應采用軸加速度數據進行控制。但該數據分布是隨機分布,軸加速度與凈空差值無顯著關系。
在后期研究風速與凈空相關關系應對試驗風場增加一個測風雷達,測試該風場的風力情況,確認湍流與切變,優化數據模型。
3.3 凈空雷達安裝誤差
以風力發電機葉輪方向為Y方向,激光凈空雷達在X方向的調整屬于有級調節,調節過程中誤差相對較大。A風場的15號風機的兩臺雷達間的誤差允許范圍外約30cm,因此數據出現較大失真。在后續雷達的安裝要求中雷達的允許誤差為±10cm,考慮到現場維護人員執行過程中的誤差,凈空雷達的實際凈空誤差范圍應為0cm~20cm。
3.4 凈空雷達隨機誤差
在本文第四節提到目前所采用的激光凈空雷達的誤差為0.3m/100m,即雷達的最大誤差為0.6m,一般激光雷達測距值的隨機誤差呈正態分布,隨機誤差分布公式如公式1所示。

由公式1與葉片變形曲線結合可得99.74%的誤差集中在凈空差值0.3m,存在2.15%的雷達的測距誤差大于0.2m。若兩臺雷達的隨機誤差差距相對較大,雷達的測距值計算為凈空值誤差會放大,即兩臺雷達間的理論最大凈空值誤差約為0.35m。
距離校驗的閾值為0.5m,基于最大凈空值誤差0.35m的假設,雷達隨機誤差會將雷達的距離校驗值縮小至0.2m左右。
4.凈空曲線修正
葉片凈空曲線因現場風力環境、葉片選型、葉片制造和風機建設的不同會產生葉片凈空曲線差異。目前基于B風場所設計的葉片凈空監測系統在A風場使用過程中因葉片凈空曲線誤差,出現葉片凈空監測系統的雷達校驗失敗故障。
結合第五節的雷達凈空校驗失敗原因分析,影響雷達誤差的主要系統誤差為葉片強度差異,隨機誤差為安裝誤差與雷達自身誤差。現場進行檢查維護排除凈空雷達安裝誤差后,從項目級進行數據分析凈空雷達隨機誤差相較于葉片凈空曲線誤差不占主要因素[2]。
綜上所述,從項目角度進行數據分析優化,可有效分析得出實際凈空曲線與理論凈空曲線的差異,但無法確認葉片凈空曲線相較于原有曲線的移動方向[3]。
