基于激光測(cè)距儀的起重機(jī)檢驗(yàn)裝置
2021-09-03 08:18:36吳瑜
起重運(yùn)輸機(jī)械 2021年14期
關(guān)鍵詞:測(cè)量
吳 瑜
河南省特種設(shè)備安全檢測(cè)研究院 鄭州 450000
0 引言
TSG Q7002—2019《起重機(jī)型式試驗(yàn)規(guī)則》規(guī)定了起重機(jī)檢驗(yàn)的方法,其中明確了在型式試驗(yàn)過(guò)程中要對(duì)起重機(jī)運(yùn)行過(guò)程中的各項(xiàng)電參數(shù),起升機(jī)構(gòu)的起升、下降速度,大小車(chē)運(yùn)行機(jī)構(gòu)的運(yùn)行速度以及主梁的撓度等參數(shù)進(jìn)行測(cè)量,且需要按照工作制進(jìn)行動(dòng)載試驗(yàn)。同時(shí),隨著節(jié)能環(huán)保、碳中和等一系列政策的提出,對(duì)起重機(jī)能效方面的考核越加重要,對(duì)此國(guó)家出臺(tái)了一系列的國(guó)家標(biāo)準(zhǔn)和行業(yè)標(biāo)準(zhǔn)。現(xiàn)有的檢驗(yàn)檢測(cè)手段大多數(shù)還停留在采用卷尺、秒表、鉗形表等工具對(duì)起重機(jī)進(jìn)行測(cè)量。在進(jìn)行動(dòng)載試驗(yàn)的過(guò)程中,基本都是依靠人為操作來(lái)控制起重機(jī)運(yùn)行,很難嚴(yán)格按照工作制要求的時(shí)間流程,對(duì)于能效測(cè)試沒(méi)有有效的方式。鑒于這種現(xiàn)狀,如果能有一款便攜式的、可與起重機(jī)控制電路連接來(lái)實(shí)現(xiàn)對(duì)起重機(jī)進(jìn)行自動(dòng)化控制,且在其運(yùn)行過(guò)程中對(duì)相關(guān)參數(shù)進(jìn)行測(cè)量的檢測(cè)裝置,將大大提高起重機(jī)檢驗(yàn)手段的自動(dòng)化和智能化。
1 系統(tǒng)原理
1.1 速度測(cè)量方案設(shè)計(jì)
現(xiàn)有的測(cè)量方式一般是利用卷尺測(cè)量出一段運(yùn)行距離的長(zhǎng)度,然后利用秒表記錄某一運(yùn)行機(jī)構(gòu)通過(guò)這段距離所用的時(shí)間,從而計(jì)算該運(yùn)行機(jī)構(gòu)的運(yùn)行速度。這種方式有明顯的缺點(diǎn):1)起重機(jī)相應(yīng)運(yùn)行機(jī)構(gòu)通過(guò)測(cè)量路段的起點(diǎn)和終點(diǎn)的判定依靠人為斷定,且手動(dòng)啟動(dòng)或停止秒表計(jì)時(shí)必然造成較大的測(cè)量誤差;2)只能測(cè)量起重機(jī)通過(guò)規(guī)定運(yùn)行區(qū)域的平均速度,無(wú)法有效采集起重機(jī)運(yùn)行過(guò)程中的瞬時(shí)速度;3)在測(cè)量起升速度時(shí)很難找到一段運(yùn)行距離的有效參考物,且該參考物還要能為檢驗(yàn)人員安全,便捷的觀(guān)測(cè)到。
一般的起重機(jī)起升速度為0 ~10 m/min,啟動(dòng)時(shí)間一般不超過(guò)3 s。運(yùn)行速度為10 ~20 m/min,啟動(dòng)時(shí)間不超過(guò)2 s。以起重機(jī)常見(jiàn)的運(yùn)行速度20 m/min 為例,啟動(dòng)時(shí)間如果為2 s,則其加速度為0.17 m/s2,傳統(tǒng)的串口通訊速率一般在100 ms 以上,如果采用這種方案會(huì)使測(cè)量誤差始終為厘米級(jí)。同時(shí),由于起重機(jī)檢驗(yàn)現(xiàn)場(chǎng)往往條件惡劣,存在較多電磁干擾情況,嚴(yán)重影響了通訊質(zhì)量。
針對(duì)以上在起重機(jī)檢驗(yàn)現(xiàn)場(chǎng)存在的種種問(wèn)題,提出本測(cè)量系統(tǒng)中關(guān)于起重機(jī)各機(jī)構(gòu)運(yùn)行速度的測(cè)量方案。系統(tǒng)采用激光測(cè)距儀對(duì)起重機(jī)運(yùn)行機(jī)構(gòu)或是載荷的位置變化進(jìn)行實(shí)時(shí)跟蹤測(cè)量,采用I/O-Link 通訊構(gòu)建點(diǎn)對(duì)點(diǎn)的測(cè)量系統(tǒng),通訊協(xié)議選用過(guò)程數(shù)據(jù)(PD)模式,即服務(wù)數(shù)據(jù)以數(shù)據(jù)幀的形式循環(huán)傳輸,每一幀的數(shù)據(jù)長(zhǎng)度不超過(guò)2 字節(jié),循環(huán)時(shí)間不超過(guò)2 ms。
1.2 電參數(shù)測(cè)量方案設(shè)計(jì)
當(dāng)前起重機(jī)檢驗(yàn)過(guò)程中電參數(shù)的測(cè)量一般只能依靠檢驗(yàn)人員用萬(wàn)用表和鉗形表等基本儀表進(jìn)行手動(dòng)測(cè)量。在起重機(jī)運(yùn)行過(guò)程中檢驗(yàn)員手持儀表對(duì)電路進(jìn)行測(cè)量十分危險(xiǎn)。且這些儀表往往不具備記錄功能,很難將起重機(jī)運(yùn)行過(guò)程中的各項(xiàng)電參數(shù)有效記錄下來(lái),后續(xù)對(duì)其進(jìn)行有效分析。針對(duì)這些問(wèn)題,本系統(tǒng)電參數(shù)的采集方案設(shè)計(jì)以特制的電參數(shù)表為測(cè)量核心,搭建測(cè)量電路。
起重機(jī)的各機(jī)構(gòu)在運(yùn)行過(guò)程中電參數(shù)較為穩(wěn)定,測(cè)量難度不大。重點(diǎn)在如何測(cè)量起重機(jī)各機(jī)構(gòu)啟動(dòng)特性。為了較好地捕捉各機(jī)構(gòu)的啟動(dòng)過(guò)程,電參數(shù)表的信號(hào)采集采用快速采集卡,采集數(shù)據(jù)的速率為1 024 個(gè)/s。采集卡的信號(hào)通道分別為4 路電壓信號(hào)采集和8 路電流采集。
1.3 系統(tǒng)硬件組成
試驗(yàn)裝置系統(tǒng)由PLC 為控制核心,觸摸屏為人機(jī)界面,通過(guò)激光測(cè)距和電參數(shù)表完成對(duì)起重機(jī)的測(cè)量,通過(guò)I/O 模塊以及外圍電路實(shí)現(xiàn)對(duì)起重機(jī)起升、運(yùn)行動(dòng)作的控制,系統(tǒng)原理如圖1 所示。
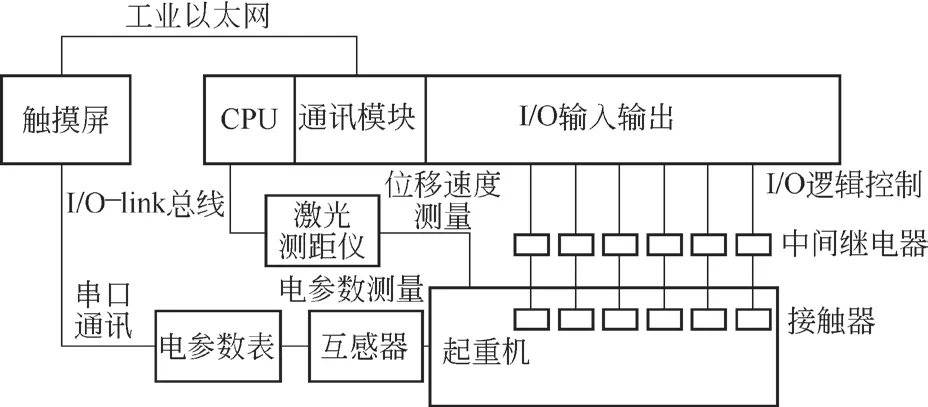
圖1 系統(tǒng)硬件原理
PLC 主要負(fù)責(zé)接受觸摸屏發(fā)出的指令,控制被測(cè)起重機(jī)完成相應(yīng)的試驗(yàn)流程。其中,CPU 模塊主要負(fù)責(zé)邏輯程序的儲(chǔ)存與運(yùn)算,接收來(lái)自通訊模塊與I/O 模塊的指令信息與狀態(tài)反饋。通訊模塊主要負(fù)責(zé)與觸摸屏進(jìn)行實(shí)時(shí)通訊。I/O 模塊負(fù)責(zé)接收外圍信號(hào)的變化,傳遞給CPU,并執(zhí)行CPU 的指令,輸出數(shù)字量信號(hào),控制起重機(jī)進(jìn)行相應(yīng)的動(dòng)作。
觸摸屏作為人機(jī)界面,負(fù)責(zé)指令的發(fā)出,數(shù)據(jù)的采集、運(yùn)算、處理、儲(chǔ)存和查詢(xún)。并對(duì)起重機(jī)的實(shí)時(shí)運(yùn)行狀態(tài)進(jìn)行監(jiān)控,系統(tǒng)故障報(bào)警。
2 軟件編制
2.1 軟件結(jié)構(gòu)
試驗(yàn)裝置軟件采用fameview 進(jìn)行編制,軟件畫(huà)面結(jié)構(gòu)如圖2 所示。用戶(hù)啟動(dòng)軟件后進(jìn)入開(kāi)始畫(huà)面,點(diǎn)擊任意鍵進(jìn)入樣機(jī)參數(shù)設(shè)置,在這里可填寫(xiě)包括樣機(jī)規(guī)格型號(hào)、樣機(jī)編號(hào)、起升速度、運(yùn)行速度、跨度、工作制,試驗(yàn)人員、試驗(yàn)日期等信息。樣機(jī)參數(shù)設(shè)置好后,用戶(hù)可根據(jù)需求進(jìn)入相應(yīng)的檢驗(yàn)項(xiàng)目。其中速度測(cè)量包括起升速度、大車(chē)運(yùn)行速度、小車(chē)運(yùn)行速度等3 種測(cè)量模式。用戶(hù)還可進(jìn)入能效測(cè)試頁(yè)面或是動(dòng)載試驗(yàn)頁(yè)面進(jìn)行相應(yīng)試驗(yàn),系統(tǒng)會(huì)根據(jù)用戶(hù)填寫(xiě)的樣機(jī)相關(guān)信息自動(dòng)控制起重機(jī)起升機(jī)構(gòu)按照相應(yīng)工作制進(jìn)行起升和下降,并在這個(gè)過(guò)程中記錄起重機(jī)的各項(xiàng)參數(shù)。
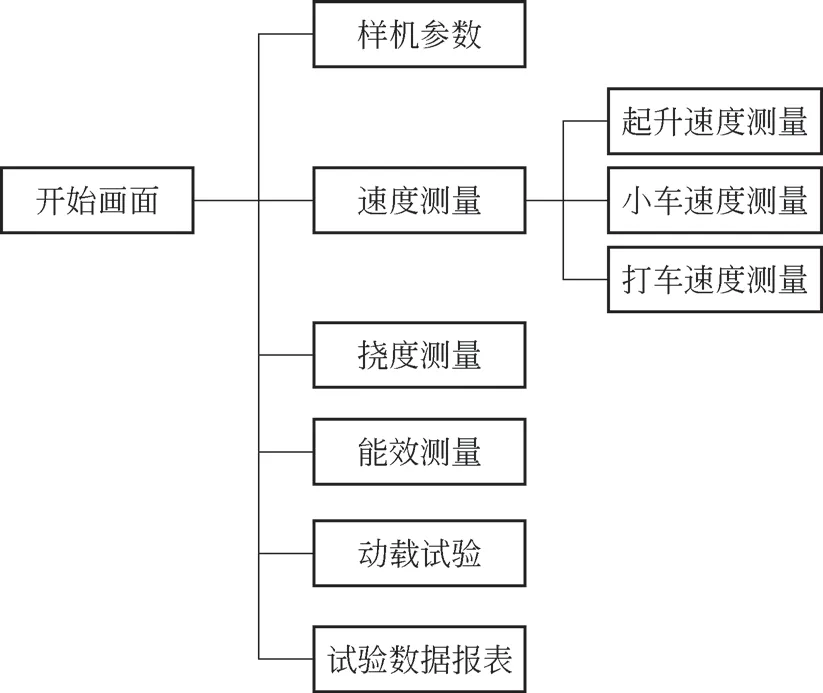
圖2 系統(tǒng)軟件結(jié)構(gòu)
2.2 激光測(cè)距儀通訊規(guī)約設(shè)計(jì)
激光測(cè)距儀采用I/O-Link 通訊規(guī)約與PLC 進(jìn)行點(diǎn)對(duì)點(diǎn)通訊,通訊數(shù)據(jù)位定義如圖3 所示。在數(shù)據(jù)傳輸過(guò)程中,每個(gè)字節(jié)由單獨(dú)的UART 幀裝載,采用半雙工模式傳輸。激光測(cè)距儀傳遞的數(shù)據(jù)為模擬量,被以8 位的2 進(jìn)制數(shù)表示。為了嚴(yán)格保證數(shù)據(jù)傳輸?shù)恼_,通訊協(xié)議規(guī)定作為系統(tǒng)主站的PLC 需重復(fù)向作為從站的激光測(cè)距儀發(fā)送2 次請(qǐng)求。如果檢測(cè)到第二次數(shù)據(jù)格式不合法,主站PLC 停止通訊,并向系統(tǒng)發(fā)送報(bào)告。系統(tǒng)通過(guò)數(shù)據(jù)報(bào)錯(cuò)報(bào)告數(shù)量評(píng)估數(shù)據(jù)傳輸質(zhì)量。

圖3 激光測(cè)距儀通訊規(guī)約
2.3 電參數(shù)表通訊規(guī)約設(shè)計(jì)
由于系統(tǒng)對(duì)電參數(shù)測(cè)量的要求較高,電參數(shù)表在經(jīng)過(guò)快速采集卡將電壓、電流信號(hào)和相位差等信號(hào)采集后通過(guò)濾波和信號(hào)放大,由其內(nèi)部的單片機(jī)對(duì)信號(hào)進(jìn)行運(yùn)算,得到功率與電能。為了準(zhǔn)確測(cè)量各機(jī)構(gòu)整個(gè)運(yùn)行過(guò)程中(啟動(dòng)-運(yùn)行-制動(dòng))的電能消耗,系統(tǒng)對(duì)電能的計(jì)算摒棄了傳統(tǒng)的功率乘以時(shí)間的計(jì)算方式,以秒為單位對(duì)每秒采集的1 024 個(gè)功率數(shù)據(jù)進(jìn)行積分計(jì)算。
電參數(shù)表與計(jì)算機(jī)之間的通訊采用串口通訊,通訊協(xié)議為RS485,通訊速率為38 400 symbol/s。由于串口通訊無(wú)法滿(mǎn)足將測(cè)量數(shù)據(jù)實(shí)時(shí)傳輸給計(jì)算機(jī)的要求,故電參數(shù)表與計(jì)算機(jī)的通訊采用服務(wù)式通訊。即計(jì)算機(jī)通過(guò)向電參數(shù)表發(fā)送命令字,控制電參數(shù)表開(kāi)始、結(jié)束記錄測(cè)量數(shù)據(jù),將其寫(xiě)入相應(yīng)地址的寄存器,并傳遞給計(jì)算機(jī)。
3 主要功能
3.1 試驗(yàn)對(duì)象
試驗(yàn)裝置主要用于對(duì)通用橋門(mén)式起重機(jī)的檢驗(yàn),被試對(duì)象的主要參數(shù)為:額定起重量0 ~100 t、電機(jī)功率0.55 ~30 kW、起升速度2 ~20 m/min、運(yùn)行速度2 ~20 m/min、有效行程高度0 ~30 m。
3.2 試驗(yàn)項(xiàng)目
1)起升速度測(cè)量 測(cè)量行程不小于1 m,當(dāng)起升超過(guò)0.5 m,啟動(dòng)測(cè)量。
2)小車(chē)運(yùn)行速度測(cè)量 測(cè)量行程不小于2 m,當(dāng)運(yùn)行超過(guò)0.5 m,啟動(dòng)測(cè)量。
3)大車(chē)運(yùn)行速度測(cè)量 測(cè)量行程不小于2 m,當(dāng)運(yùn)行超過(guò)0.5 m,啟動(dòng)測(cè)量。
以上測(cè)量時(shí)間可人為根據(jù)運(yùn)行行程測(cè)定,連測(cè)4 次,取平均值。
4)撓度測(cè)量 將激光測(cè)距儀放置在主梁正下方,對(duì)準(zhǔn)主梁跨中,手動(dòng)測(cè)量。
5)能效測(cè)量 在額定電壓、額定頻率和試驗(yàn)載荷為額定載荷條件下,控制起重機(jī)起升機(jī)構(gòu)按照相應(yīng)的循環(huán)周期(M1 ~M8)進(jìn)行連續(xù)運(yùn)轉(zhuǎn),測(cè)量10 個(gè)循環(huán)周期的供給能之和與有效能之和,再計(jì)算能效。
6)動(dòng)載試驗(yàn) 在額定電壓、額定頻率和試驗(yàn)載荷為1.1 倍額定載荷條件下,控制起重機(jī)按照相應(yīng)的循環(huán)周期(M1 ~M8)進(jìn)行連續(xù)運(yùn)轉(zhuǎn),根據(jù)不同的試驗(yàn)項(xiàng)目,選擇測(cè)量時(shí)間或試驗(yàn)次數(shù)。
4 應(yīng)用實(shí)例分析
4.1 參數(shù)設(shè)置
操作界面如圖4、圖5 所示,進(jìn)入樣機(jī)參數(shù)界面,將樣機(jī)參數(shù)輸入完整后,進(jìn)入相應(yīng)的試驗(yàn)界面,在試驗(yàn)界面上會(huì)顯示樣機(jī)的相關(guān)信息。如在動(dòng)載試驗(yàn)頁(yè)面下,會(huì)顯示當(dāng)前工作制下,樣機(jī)起升與下降時(shí)間曲線(xiàn)。在屏幕下方會(huì)有相應(yīng)的操作按鍵,用戶(hù)可通過(guò)按鍵控制起重機(jī)進(jìn)行相應(yīng)動(dòng)作來(lái)調(diào)整各機(jī)構(gòu)的位置。所有機(jī)構(gòu)的位置調(diào)整好后,用戶(hù)點(diǎn)擊開(kāi)始按鈕,系統(tǒng)會(huì)自動(dòng)控制起重機(jī)按照流程進(jìn)行動(dòng)作,并在這個(gè)過(guò)程中完成對(duì)各個(gè)參數(shù)的測(cè)量。測(cè)量數(shù)據(jù)在屏幕相應(yīng)位置顯示,試驗(yàn)完成后用戶(hù)可根據(jù)需要將數(shù)據(jù)儲(chǔ)存進(jìn)數(shù)據(jù)庫(kù),并打印成報(bào)表。試驗(yàn)中如遇到突發(fā)情況,用戶(hù)可以點(diǎn)擊停止按鈕終止試驗(yàn)。
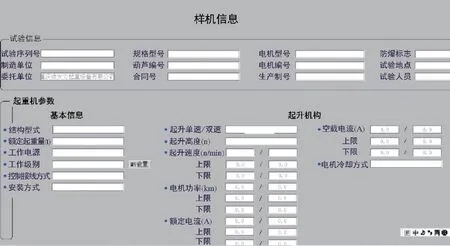
圖4 樣機(jī)參數(shù)

圖5 能效試驗(yàn)
為了滿(mǎn)足用戶(hù)的需求,系統(tǒng)除了設(shè)置M1 ~M8 工作制外,還設(shè)置了M9 工作制,專(zhuān)門(mén)針對(duì)用戶(hù)的需求自定義各個(gè)動(dòng)作的時(shí)間,如圖6 所示。
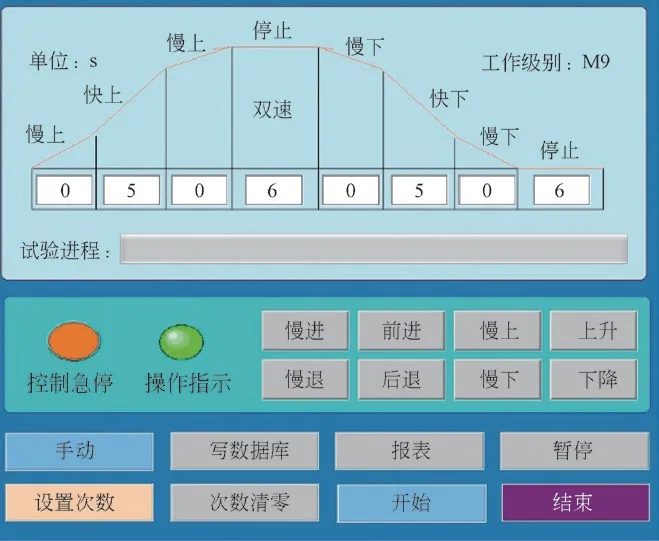
圖6 動(dòng)載試驗(yàn)
4.2 速度測(cè)量
速度測(cè)量分為起升速度、大小車(chē)運(yùn)行速度測(cè)量3 個(gè)子界面。在3 個(gè)子界面下對(duì)各個(gè)機(jī)構(gòu)的運(yùn)行速度進(jìn)行測(cè)量,并將數(shù)據(jù)與傳統(tǒng)的采用卷尺和秒表方式測(cè)量得到的速度數(shù)據(jù)進(jìn)行對(duì)比,表1 列舉了以5 t 懸掛單梁、16 t懸掛單梁和32 t 通橋?yàn)闃訖C(jī)進(jìn)行試驗(yàn)的數(shù)據(jù)對(duì)比。具體的試驗(yàn)方法為:對(duì)起升速度、大小車(chē)運(yùn)行速度分別采用2 種方法進(jìn)行測(cè)量。為了描述方便,將本文描述的采用激光測(cè)距儀的測(cè)量方法作為試驗(yàn)組,將采用卷尺、秒表的測(cè)量方法作為對(duì)照組
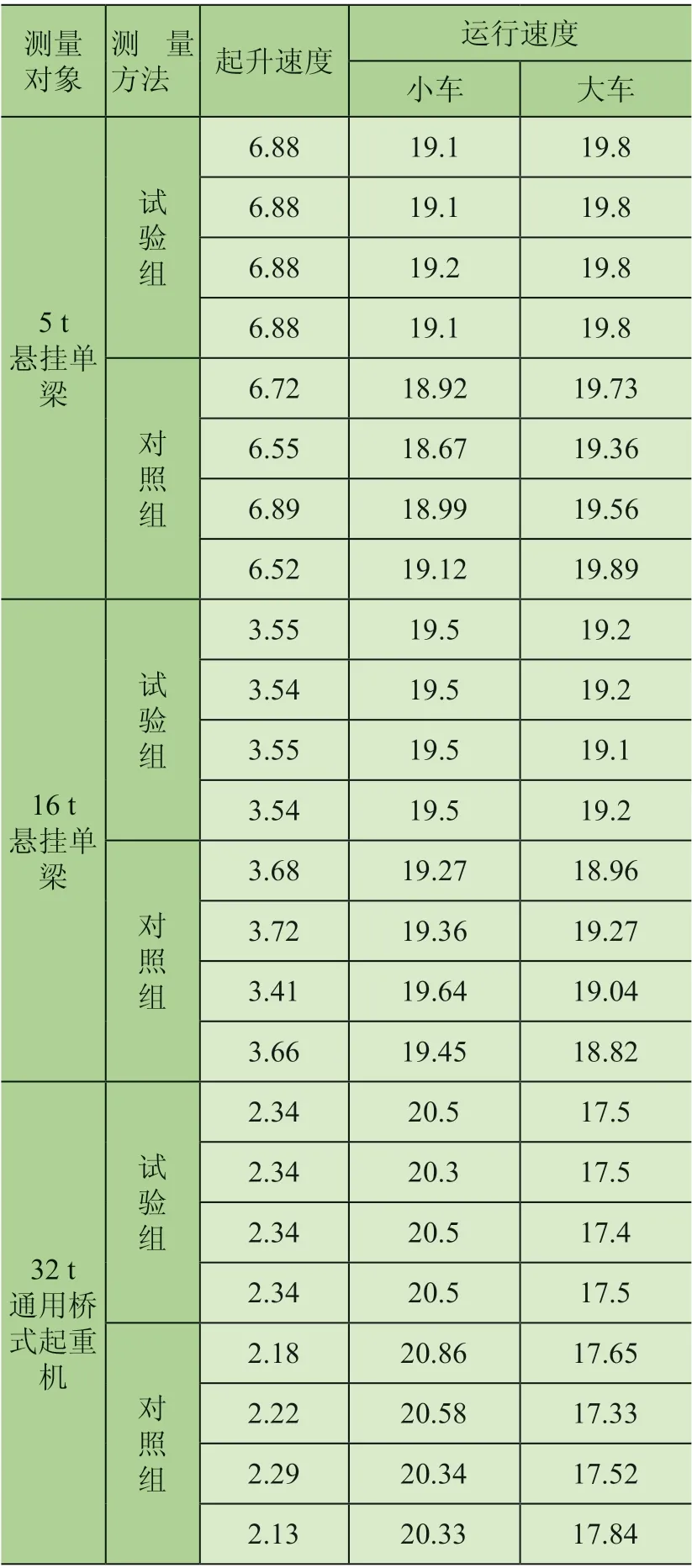
表1 速度測(cè)試數(shù)據(jù)對(duì)比 m·min-1
從表1 列舉的3 組對(duì)比試驗(yàn)數(shù)據(jù)可以看出,試驗(yàn)組數(shù)據(jù)的離散程度遠(yuǎn)小于對(duì)照組,證明試驗(yàn)組采用的測(cè)量方法具有更高的重復(fù)精度,且這種優(yōu)勢(shì)在測(cè)量運(yùn)行速度較快的機(jī)構(gòu)時(shí)更為明顯。
因?yàn)檗饤壛瞬捎镁沓吆兔氡頊y(cè)量速度需有一段測(cè)量行程的限制,激光測(cè)距儀具有可實(shí)時(shí)采集被測(cè)機(jī)構(gòu)位置變化的特點(diǎn),所以系統(tǒng)測(cè)量的是各運(yùn)行機(jī)構(gòu)的瞬時(shí)運(yùn)行速度,故還可利用速度數(shù)據(jù)繪制各機(jī)構(gòu)的運(yùn)行特性曲線(xiàn)。圖7 為16 t 懸掛單梁起升速度數(shù)據(jù)的速度特性曲線(xiàn)。
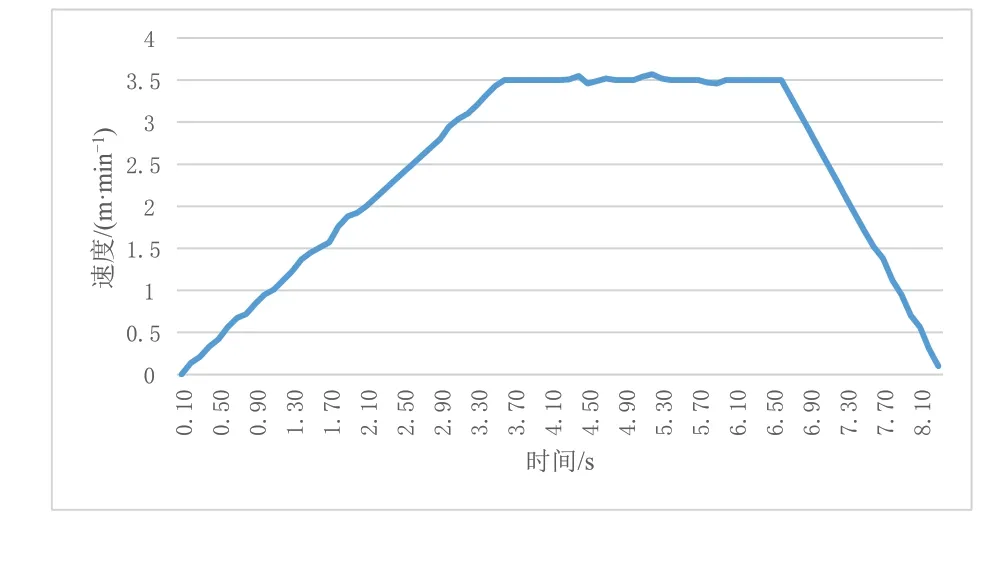
圖7 速度特性曲線(xiàn)
4.3 電參數(shù)測(cè)量
采用高速采集卡使電參數(shù)表對(duì)電參數(shù)變化的捕捉能力比一般的儀表靈敏,使系統(tǒng)可完整地記錄各運(yùn)行機(jī)構(gòu)在啟動(dòng)過(guò)程中的各項(xiàng)電參數(shù)變化,也能監(jiān)測(cè)各運(yùn)行機(jī)構(gòu)在運(yùn)行過(guò)程中的異常波動(dòng),從而為分析起重機(jī)的運(yùn)行狀態(tài)提供了數(shù)據(jù)支持。表2 為以5 t 懸掛單梁為樣機(jī)的對(duì)比試驗(yàn)數(shù)據(jù),將本文所述電參數(shù)表為測(cè)量方法設(shè)為試驗(yàn)組,將傳統(tǒng)的功率儀為測(cè)量方法設(shè)為對(duì)照組。起重機(jī)起升機(jī)構(gòu)由靜止到起升一段距離后再停止,測(cè)量整個(gè)過(guò)程的電參數(shù)變化。
試驗(yàn)組電參數(shù)表采集數(shù)據(jù)量大,表中只節(jié)選了部分?jǐn)?shù)據(jù)。由于對(duì)照組采用的功率測(cè)試儀數(shù)據(jù)傳輸速度慢,所以選擇數(shù)據(jù)的方法是將對(duì)照組采集到的數(shù)據(jù)全部采用,試驗(yàn)組的數(shù)據(jù)只采用與對(duì)照組數(shù)據(jù)具有相同時(shí)間戳的數(shù)據(jù)。試驗(yàn)組數(shù)據(jù)中供給能為對(duì)功率進(jìn)行積分求得。從表2 列舉的對(duì)比試驗(yàn)數(shù)據(jù)可以看出,試驗(yàn)組記錄了起升機(jī)構(gòu)啟動(dòng)和停止過(guò)程中的電參數(shù)變化,由于對(duì)照組采用了傳統(tǒng)的功率測(cè)試儀,通訊速率一般在100 ms 以上,很難采集到啟動(dòng)和停止過(guò)程中的電參數(shù)變化。從數(shù)據(jù)上還可以看出,試驗(yàn)組測(cè)量的供給能高于對(duì)照組測(cè)量出的供給能,其原因主要有兩點(diǎn):一是因?yàn)閷?duì)照組的供給能是功率乘以時(shí)間求得,這使得在起重機(jī)起升過(guò)程中的電參數(shù)變化沒(méi)有被系統(tǒng)詳細(xì)記錄,能量消耗積少成多,造成了對(duì)照組供給能數(shù)據(jù)逐漸偏小。二是由于這種算法忽略了啟動(dòng)和制動(dòng)過(guò)程的能量耗損,而這個(gè)過(guò)程消耗的供給能要高于起升機(jī)構(gòu)正常運(yùn)轉(zhuǎn)時(shí)消耗的供給能,造成了對(duì)照組供給能測(cè)試數(shù)據(jù)偏小。

表2 5 t 懸掛單梁電參數(shù)測(cè)試數(shù)據(jù)對(duì)比
5 結(jié)語(yǔ)
基于激光測(cè)距儀的起重機(jī)檢驗(yàn)裝置操作簡(jiǎn)單,系統(tǒng)主要按照規(guī)定運(yùn)轉(zhuǎn)方式,可自動(dòng)控制起重機(jī)起升、下降與大小車(chē)運(yùn)行。該裝置具有結(jié)構(gòu)緊湊、質(zhì)量輕、便于攜帶、易于安裝等優(yōu)點(diǎn),可非常簡(jiǎn)單便捷地對(duì)接大部分常規(guī)起重機(jī)的控制電路。
基于激光測(cè)距儀的起重機(jī)檢驗(yàn)裝置對(duì)起重機(jī)各項(xiàng)參數(shù)的測(cè)量方法完全符合TSG Q7002—2019《起重機(jī)械型式試驗(yàn)規(guī)則》、GB/T 30222—2013《起重機(jī)械用電力驅(qū)動(dòng)起升機(jī)構(gòu)能效測(cè)試方法》等國(guó)家標(biāo)準(zhǔn)的要求。為起重機(jī)檢驗(yàn)人員現(xiàn)場(chǎng)從事法定的檢驗(yàn)工作提供了有力保證。
基于激光測(cè)距儀的起重機(jī)檢驗(yàn)裝置采用的速度測(cè)量方式極大地提高了速度測(cè)量的自動(dòng)化程度,避免了人為操作過(guò)程中引入的各種測(cè)量誤差,有效提高了測(cè)量精度,且實(shí)現(xiàn)了對(duì)起重機(jī)各運(yùn)行機(jī)構(gòu)實(shí)時(shí)速度變化的監(jiān)測(cè)。系統(tǒng)實(shí)現(xiàn)了對(duì)電參數(shù)的高速采集,使檢驗(yàn)人員對(duì)分析起重機(jī)各機(jī)構(gòu)在啟動(dòng)、運(yùn)行和制動(dòng)過(guò)程中的電參數(shù)變化特性提供了數(shù)據(jù)支撐。同時(shí),系統(tǒng)在測(cè)量供給能時(shí),利用采集速度快的特點(diǎn),將采集到的電參數(shù)數(shù)據(jù)進(jìn)行了積分處理,使得供給能的測(cè)量比傳統(tǒng)功率測(cè)試儀測(cè)量的數(shù)據(jù)更為準(zhǔn)確。
基于激光測(cè)距儀的起重機(jī)檢驗(yàn)裝置填補(bǔ)了國(guó)內(nèi)起重機(jī)現(xiàn)場(chǎng)檢驗(yàn)工作缺少自動(dòng)化檢驗(yàn)設(shè)備的空白,利用激光測(cè)距儀可以不接觸被測(cè)物體便能測(cè)量距離、速度等參數(shù)的優(yōu)點(diǎn),避免了傳統(tǒng)測(cè)量方法誤差大,操作麻煩的弊端。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
