基于灰色預測模型的井下精確人員定位方法
2021-09-02 12:09:02唐麗均吳畏劉世森
工礦自動化 2021年8期
唐麗均, 吳畏, 劉世森
(1.重慶工程職業技術學院 大數據與物聯網學院,重慶 402260;2.重慶城市管理職業學院 智能工程學院,重慶 401331;3.中煤科工集團重慶研究院有限公司,重慶 400039)
0 引言
為滿足煤礦井下定員管理和應急救援的需求,許多學者基于接收信號強度指示(Received Signal Strength Indication,RSSI)、到達時間(Time of Arrival,TOA)、到達時間差(Time Difference of Arrival,TDOA)、飛行時間(Time of Flight,TOF)、到達角度(Arrival of Angle,AOA)等礦井無線實時定位技術,設計了井下精確人員定位系統[1-4],用來掌握井下人員動態分布情況和獲取采掘工作面人員數量,以提高井下人員工作安全系數。但由于礦井巷道空間狹小,巷道表面粗糙,且存在各類障礙物,使無線信號發生反射、衍射和散射等非視距(Non Line of Sight,NLOS)傳輸,產生NLOS誤差,進而影響系統定位精度[5-6]。此外,系統的時鐘誤差,如時鐘頻偏引起的定時誤差、收發設備時鐘同步誤差等[7-8],也是影響系統定位精度的重要因素。
目前井下精確人員定位系統主要采用基于卡爾曼濾波的定位方法來減小NLOS誤差和時鐘誤差[9-11],該方法根據上一時刻卡爾曼濾波后的最佳估計值與當前時刻的測量距離進行加權計算,從而得到當前時刻的人員位置,但當測量距離出現粗大誤差時,該方法定位精度不高。灰色預測模型是通過少量的、不完全的信息,建立數學模型并做出預測的一種預測方法[12-14],用于灰色預測模型預測所需的原始數據不需要有規律性分布,模型預測準確度高。因此,本文提出了一種基于灰色預測模型的井下精確人員定位方法,該方法不需要大量數據,計算量小,能有效提高井下精確人員定位系統的定位精度。
1 方法原理
井下精確人員定位系統架構如圖1所示。攜帶標志卡的人員進入定位讀卡器覆蓋范圍時,定位讀卡器通過無線定位技術計算出標志卡的位置,然后將其覆蓋范圍內所有標志卡的位置數據進行匯集,再將匯集后的位置數據通過人員管理分站和交換機上傳至人員定位服務器。
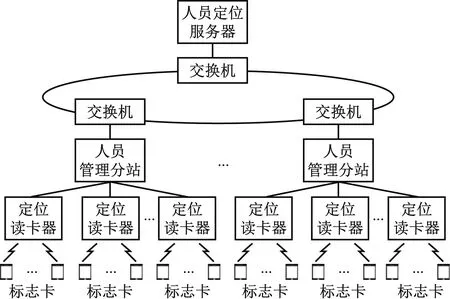
圖1 井下精確人員定位系統架構
基于灰色預測模型的井下精確人員定位方法原理如圖2所示。首先給進入定位讀卡器覆蓋范圍內的每張標志卡動態分配一個數據緩存區,定位讀卡器將標志卡與讀卡器之間的測量距離存儲至該標志卡對應的數據緩存區;然后根據數據緩存區內的測量距離計算出誤差判斷閾值,并采用灰色預測模型計算出標志卡與讀卡器之間的預測距離;再通過將預測距離與測量距離的差值和誤差判斷閾值進行比較,更新標志卡的位置數據;最后將定位讀卡器覆蓋范圍內所有標志卡的位置數據匯集后上傳。當標志卡離開定位讀卡器覆蓋范圍后,定位讀卡器將該標志卡的數據緩存區刪除,以節省定位讀卡器存儲空間。
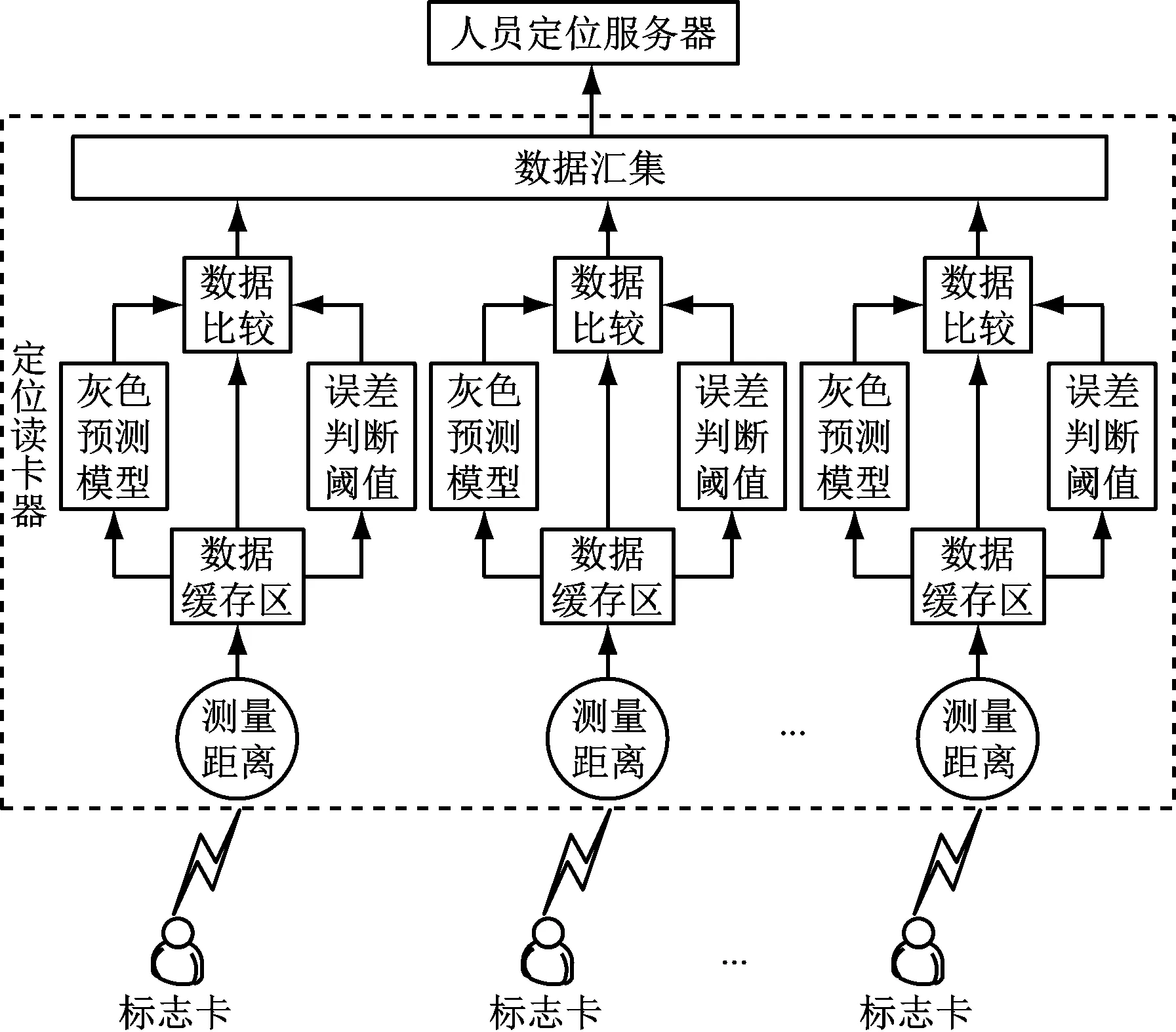
圖2 基于灰色預測模型的井下精確人員定位方法原理
2 方法實現
基于灰色預測模型的井下精確人員定位方法流程如圖3所示。根據數據緩存區內前N個時刻的測量距離,采用GM(1,1)模型計算出第N+1時刻的預測距離;如果該預測距離的精度等級為優,且與測量距離的差值超過誤差判斷閾值,則用該預測距離替代測量距離,更新測量距離數列,反復循環,直到標志卡離開定位讀卡器覆蓋范圍。
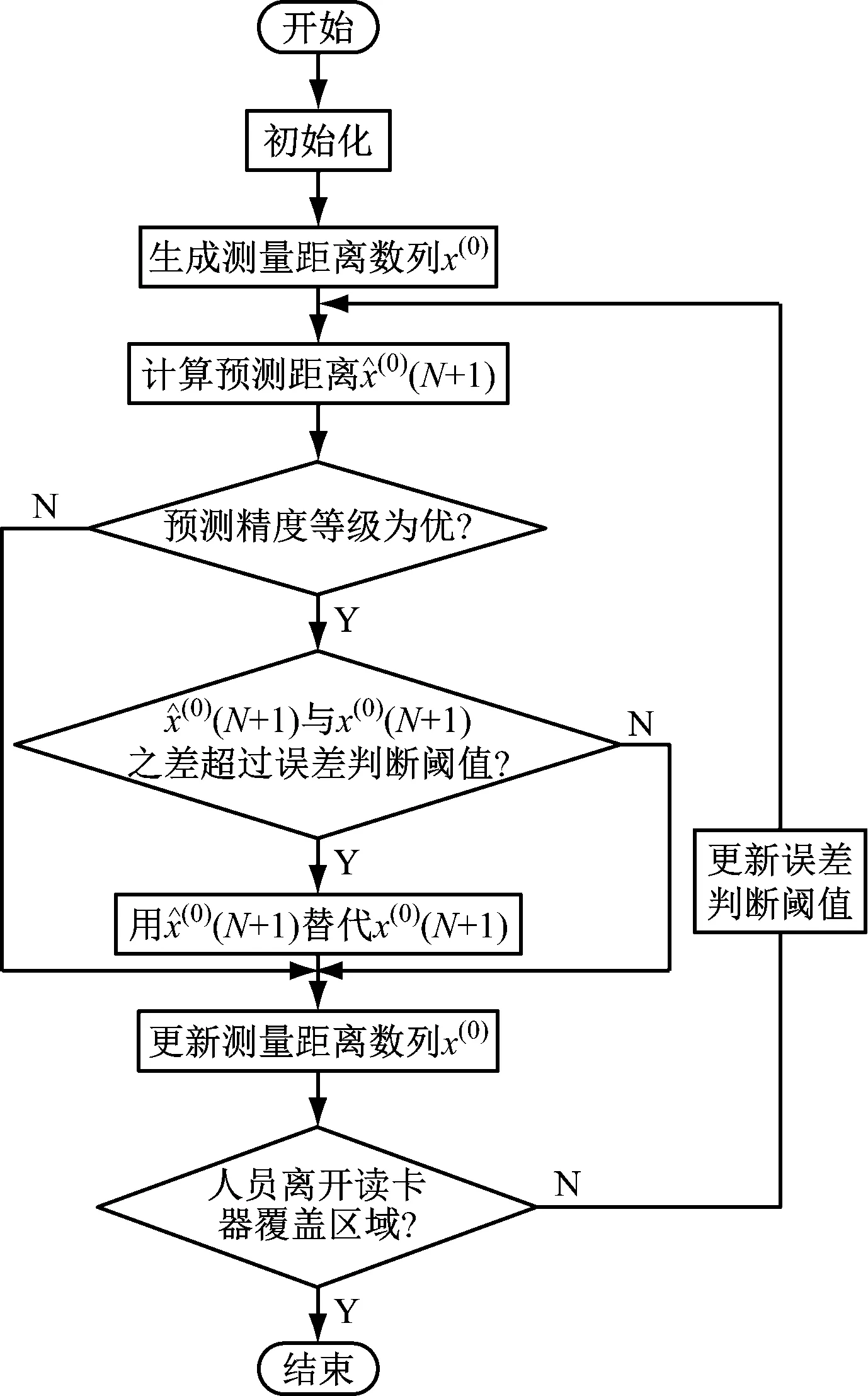
圖3 基于灰色預測模型的井下精確人員定位方法流程
基于灰色預測模型的井下精確人員定位方法具體實現步驟如下。
(1)設置數據緩存區長度N和初始誤差判斷閾值Xthr。
(2)按照等時間間隔對標志卡與讀卡器之間的測量距離進行采樣,生成離散化的測量距離數列:
x(0)={x(0)(1),x(0)(2),…,x(0)(N)}
(1)
式中x(0)(k)為第k(k=1,2,…,N)時刻的測量距離。
(3)為弱化測量距離的隨機性和波動性,將x(0)進行一次累加,生成累加數列x(1)={x(1)(1),x(1)(2),…,x(1)(N)},x(1)(k)為第k時刻測量距離的累加值。
x(1)(1)=x(0)(1)
(2)
x(1)(k)=x(1)(k-1)+x(0)(k)k=2,3,…,N
(3)
GM(1,1)模型白化微分方程為
(4)
式中:t為時間;a為發展灰度,表征數列x(1)的發展規律和趨勢;u為控制灰度,反映數列x(1)的變化關系。
由最小二乘法估計a,u:
(5)


(6)
則第N+1時刻的預測距離為
(7)
(4)生成殘差序列:
(8)
x(0)的均方差為
(9)

殘差序列E(k)的均方差為
(10)

計算后驗差比值C和小誤差概率P:
C=S1/S2
(11)
(12)

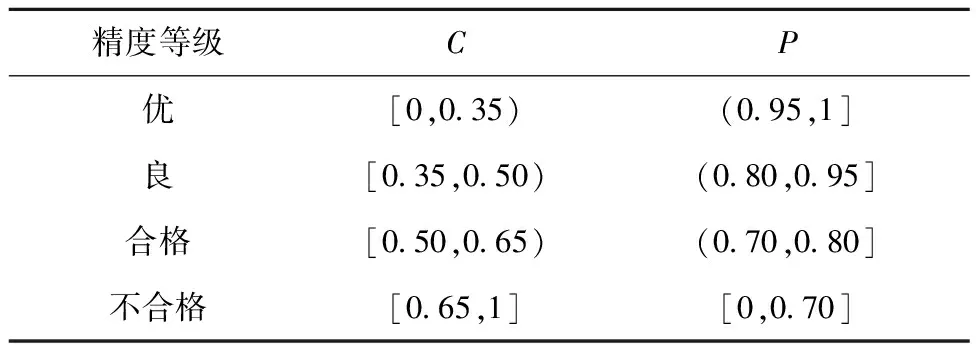
表1 預測精度等級
(6)更新測量距離數列x(0),即
x(0)(k)=x(0)(k+1)
(13)

(14)
(15)
3 測試驗證
為驗證基于灰色預測模型的井下精確人員定位方法的有效性,在黑龍江龍煤礦業集團股份有限公司某煤礦搭建井下精確人員定位系統并進行測試,如圖4所示。巷道寬3 m,高4.5 m。測試人員攜帶標志卡,從定位讀卡器處勻速前進至距定位讀卡器300 m處,然后靜止不動一段時間,再勻速返回定位讀卡器處,測試參數見表2。

圖4 測試場景
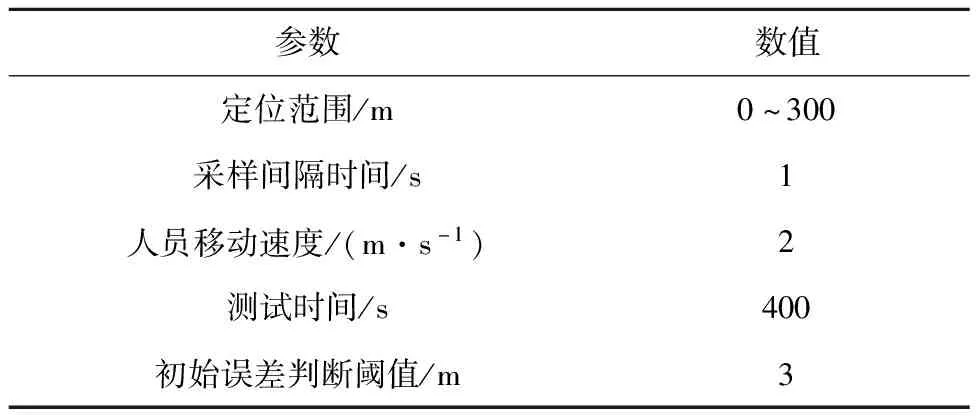
表2 測試參數
井下精確人員定位系統分別使用基于卡爾曼濾波的定位方法和基于灰色預測模型的定位方法時,人員運動軌跡定位對比如圖5所示。可看出系統在定位人員運動軌跡時出現4個異常點,異常點處測距誤差較大,基于卡爾曼濾波的定位方法在異常點處的定位誤差仍偏大,而基于灰色預測模型的定位方法在異常點處的定位誤差很小。
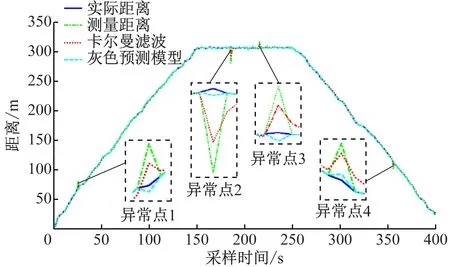
圖5 不同定位方法下人員運動軌跡定位對比
基于卡爾曼濾波的定位方法和基于灰色預測模型的定位方法在異常點處的定位誤差對比見表3。可看出基于卡爾曼濾波的定位方法受測距誤差影響較大,定位誤差大于5.5 m,這是由于基于卡爾曼濾波的定位方法是根據當前時刻的測量距離和預測距離與實際距離的偏離程度,不斷更新測量距離和預測距離所占權重;基于灰色預測模型的定位方法不受測距誤差影響,定位誤差在1.1 m之內,這是由于基于灰色預測模型的定位方法不使用當前時刻的測量距離來計算預測距離,所以無論當前時刻的測距誤差多大,都不會對定位精度產生影響。
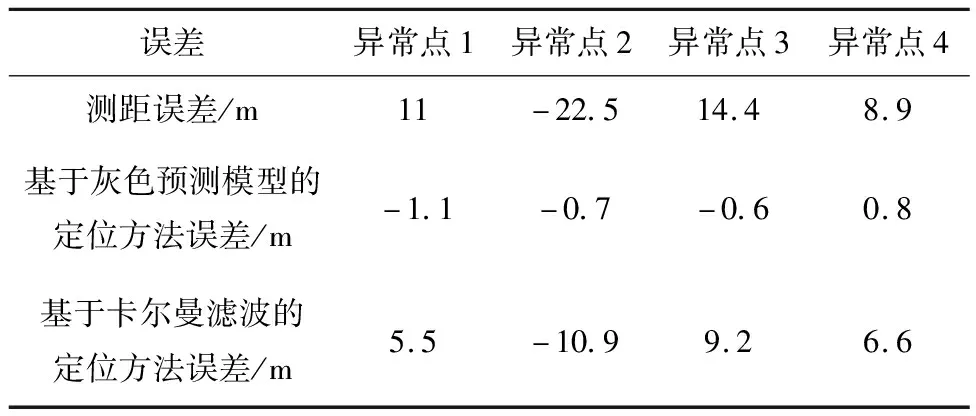
表3 不同定位方法下異常點處定位誤差對比
4 結語
提出了基于灰色預測模型的井下精確人員定位方法。該方法根據定位讀卡器中數據緩存區內標志卡與讀卡器之間的測量距離,采用灰色預測模型計算下一時刻標志卡與讀卡器之間的預測距離,使用精度高的預測距離替代測量距離,實現了對測距誤差的優化補償。測試結果表明,該方法不受測距誤差影響,當測量距離存在粗大誤差時,該方法的定位精度明顯優于基于卡爾曼濾波的定位方法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
意林原創版(2016年10期)2016-11-25 10:28:30
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
