自動駕駛慣性傳感器誤差標定方法
2021-09-02 09:04:04楊莉李冬雪王強趙目龍李海波
汽車文摘 2021年9期
楊莉李冬雪王強趙目龍李海波
(1.中國第一汽車股份有限公司智能網聯開發院,長春130013;2.汽車振動噪聲與安全控制綜合技術國家重點實驗室,長春130013;3.大陸汽車電子(連云港)有限公司長春分公司被動安全傳感器事業部,長春130000)
主題詞:慣性傳感器 自動駕駛 后向傳播神經網絡 誤差標定
1 前言
隨著汽車行業“新四化”的提出,電動化、自動化、網聯化、共享化成為汽車行業未來的發展趨勢和發展方向。“新四化”中自動化的落地,需要多種傳感器的支撐。杜莎等[1]提出傳感器作為自動駕駛車輛的眼睛,在自動駕駛發展的過程中發揮著重要的作用。王田等[2]對自動駕駛傳感技術的專利情況進行了分析和研究,發現近年來針對自動駕駛傳感器的專利申請量和活躍度均處于領先地位。李磊等[3]設計了多傳感器融合的自動車定位導航系統,研究結果表明融合慣性傳感器的自動車定位系統結構簡單,且可極大提高定位導航精度。Elsheikh等[4]將慣性傳感器與GNSS信息進行融合,獲得了穩定的定位性能。可見,隨著自動駕駛等級的提高,慣性傳感器因其工作不受外部環境影響而成為自動駕駛中傳感器融合的核心技術元件。
然而,由于機械安裝誤差、芯片封裝誤差、工作環境溫度、產品生命周期和電磁干擾因素的影響,慣性傳感器的輸出存在一定的誤差。目前應用的誤差標定技術有3項:
(1)采用數學方法進行,例如田曉春等[5]提出的采用數學模型推導標定方法;
(2)通過算法進行自濾波,例如Kelly[6]提出的卡爾曼濾波算法;
(3)僅對機械安裝誤差進行消除,例如馬亞平等[7]提出的安裝誤差正交補償方法,但其未考慮其他方面的誤差因素。
綜上,僅利用目前的誤差標定技術,慣性傳感器輸出的加速度和角速度值無法滿足自動駕駛領域的需求。因此,如何降低慣性傳感器的輸出誤差,成為慣性傳感器在自動駕駛領域應用的技術瓶頸。
本文利用精簡后向傳播神經網絡對慣性傳感器的輸出與誤差進行擬合,構建了輸出誤差的數學模型。仿真結果表明,該方法成功模擬了各種復雜的非線性誤差對傳感器輸出的影響,提高了慣性傳感器的輸出精度。
2 慣性傳感器工作原理
慣性傳感器是一種微機電器件(Micro Electro Me?chanical System,MEMS),其基本工作原理是根據科里奧利力原理檢測角速度及根據電容值變化檢測加速度[8]。不同生產廠商設計的慣性傳感器可能包含不同的微機電結構,但基本的組成單元均3部分:
(1)MEMS慣性傳感單元;
(2)數據處理單元ASIC;
(3)誤差標定單元MCU。
通常情況下,MEMS慣性傳感單元和數據處理單元被封裝在1個芯片內。
MEMS慣性傳感單元將物理量信號角速度和加速度轉換為電信號[9];數據處理單元ASIC將電信號進行放大和模數轉換,并進行預處理;誤差標定單元MCU在預處理數據的基礎上,進行裝車后的誤差標定。預處理負責將芯片層級的誤差進行處理,包括芯片封裝誤差和微機電結構誤差;裝車后的誤差標定負責處理整車機械安裝誤差、工作環境溫度、產品生命周期和EMC/EMI的影響誤差。
慣性傳感器的輸出誤差將直接影響整車的定位精度,間接影響整車自動駕駛功能的實現及整車的安全性。
3 慣性傳感器誤差分析
由于微機電結構的復雜性,慣性傳感器的誤差主要包含以下5種[10]:
(1)由機械安裝誤差和傳感器芯片內部封裝誤差導致的零輸入誤差(Offset error);
(2)由模擬/數字轉換時,模數轉換處理器分辨率導致的靈敏度誤差(Sensitivity error);
(3)由芯片內部模數轉換處理器的非線性導致的非線性誤差(Linearity error);
(4)由傳感器芯片內部隨機噪聲和PCB壓電效應導致的噪聲誤差(Noise error);
(5)由傳感器工作環境的溫度變化、產品生命周期和電磁干擾導致的數據漂移誤差(Drift error)。
基于上述誤差組成,整個慣性傳感器輸出誤差分析如圖1所示。
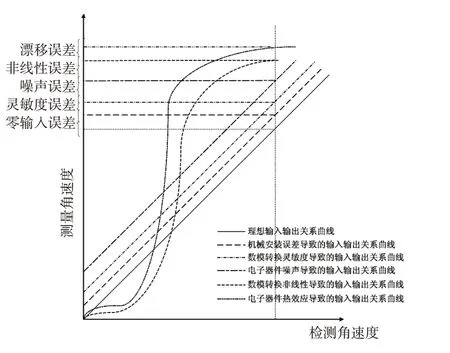
圖1 慣性傳感器誤差分析示意
由圖1可知,由于各種誤差的存在,將導致實際測量值與理論期望值之間存在一定的誤差,該誤差的大小直接影響自動駕駛定位的精度,并間接影響整車的安全性。
4 神經網絡模型構建
慣性傳感器是一個復雜的非線性隨機系統,其誤差與實際輸入物理量之間的關系十分復雜,較難用一個簡單函數來表示。因此,選用多層神經網絡來表示這樣的關系,多層神經網絡的本質就是一個多層復合函數。精簡后向傳播神經網絡因其計算量小、收斂容易等優點,已廣泛應用于多種復雜系統中。王琳瑋等[11]設計了一種基于神經網絡自整定的PID控制算法,用于球形機器人的位置和姿態控制,獲得了良好的運動性能。Guo W等[12]提出了一種混合神經網絡,用于高超聲速飛行器慣性測量單元誤差參數的有效估計,使其具有較高性能。Omid D等[13]設計了一種深度卷積神經網絡,用于人體步態的識別,實現了根據步態運動數據來識別個人特征。本文設計的精簡后向傳播神經網絡具有結構簡單、易實現和硬件及軟件資源占用少的優勢。
精簡后向傳播神經網絡的設計主要考慮以下5個方面:網絡的層數、每層中的神經元個數、傳遞函數、初始值和學習速率[14]。具有偏差和至少一個S型隱含層加上一個線性輸出層的網絡能夠逼近任何一個有理函數[15]。因此,針對設計需求,選擇2層神經網絡結構(隱含層和輸出層),如圖2所示(圖中,x是神經網絡的輸入,y是神經網絡的輸出,by是輸出層閾值,b1…10為隱含層閾值,Wx1…x10和W1y…10y為連接權值)。
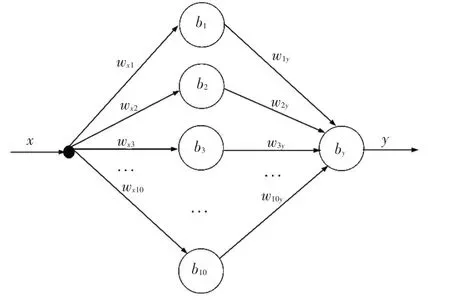
圖2 慣性傳感器誤差標定神經網絡結構
利用MathCAD軟件對網絡參數進行迭代計算。經過網絡初始化、樣本數據歸一化、前向輸出計算、后向權值修正等步驟,最終當迭代次數為45次時,總誤差e為2.638×10-3,滿足要求。此時,神經網絡的各權值參數如表1所示。

表1 慣性傳感器誤差神經網絡參數表
5 測試過程及結果
為驗證上述誤差標定方法的性能,將該方法在誤差標定單元MCU內部進行了編程實現。然后分別對未使用該誤差標定方法和使用該誤差標定方法的樣品進行了轉臺測試。
轉臺測試的原理如圖3所示。轉臺是一個機械結構,能夠以設定的角速度旋轉,用來模擬整車結構。被測樣品固定于轉臺之上,將被測樣品以不同的角度進行軸向固定,可以分別模擬整車上的加速度和角速度。為了節省測試時間,提高測試效率,一個轉臺上,可以以設定的角度,固定3~6個被測樣品。

圖3 轉臺測試的原理
同時,轉臺放置于溫濕度試驗箱中,并置于機械振動臺架上,需根據生產驗證的環境測試標準需求,模擬環境中溫濕度和振動的影響。
測試過程中,將樣品通過線束與上位機相連,在上位機中通過人機交互界面讀取測試數據。
最具代表性的角速度測試結果如圖4所示。由圖4可知,使用傳統的統一化標定方法,由于每個傳感器均使用相同的原始誤差值,未考慮每個傳感器的特殊物理性質,標定后的結果與實際轉臺轉動的角速度誤差較大。使用本文提出的誤差標定方法后,轉臺測試的結果更接近實際轉臺轉動的角速度。

圖4 利用神經網絡標定方法的轉臺測試結果
6 結束語
本文利用精簡后向傳播神經網絡表征溫度、機械安裝誤差、機械振動、電磁干擾因素對慣性傳感器輸出誤差的復雜影響,建立了慣性傳感器輸出誤差與實際輸入物理量之間的關系模型,并將該模型應用于慣性傳感器的標定中。實際測試結果表明,該模型更精確地反映了慣性傳感器的實際誤差,按照該模型標定后的輸出數據更接近實際物理量,為慣性傳感器在自動駕駛中的應用提供了可行性方案。
