高穩定性三視場電視探測系統
2021-09-01 09:28:40彭建偉馬迎軍陳衛寧張高鵬
光學精密工程 2021年7期
彭建偉,馬迎軍,陳衛寧,史 魁,張高鵬
(中國科學院 西安光學精密機械研究所,陜西 西安 710119)
1 引 言
光電測量系統主要用于對快速目標的實時跟蹤與測量,電視探測系統是其重要組成部分。隨著軍事任務需求的多樣化,電視探測系統要具有多視場切換功能,可以在短焦大視場進行大范圍搜索,而在長焦小視場則可探測識別更遠距離的目標,從而實現對目標的精準跟蹤及捕獲[1-3]。
多視場探測系統通過控制光學系統相應透鏡組的移動引起焦距變化,從而實現視場的切換。變倍系統中的視場切換機構大致可分為三種形式:軸向平移變倍機構、徑向切入切出變倍機構和旋轉式切換變倍機構[4-7]。軸向平移變倍機構的切換速度慢,切換過程中系統離焦,模糊畫面時間較長,影響使用。徑向切入切出變倍機構采用鐘擺形式或者平移機構控制透鏡組打入打出光學系統,所占用的系統徑向尺寸較大,不利于系統的輕小型化,且裝調難度較大。而旋轉式切換變倍系統將多個透鏡組安裝于一個旋轉鏡筒上,通過一個軸系驅動則可以達到較快的切換速度。旋轉式切換變倍系統的結構設計緊湊、空間利用率高,而且現有的機械加工精度也可以滿足光學系統的裝配要求。但是,旋轉式切換變倍機構的定位精度和重復定位精度是設計中的一個難點。定位精度決定變倍機構在進行視場切換過程中光學系統的光軸一致性;而重復定位精度則決定了變倍機構在多次切換過程中以及高低溫和劇烈振動條件下系統光軸的穩定性。
視場切換機構通常用于紅外光學設備中,可見光和近紅外電視設備中并不多見。因為可見光和近紅外波段的光學設備對像質要求更高,對光軸的一致性和穩定性等指標更為敏感,對視場切換機構的定位精度和重復定位精度要求更高[8-10]。視場切換運動機構的引入往往會帶來更多不穩定因素。安裝于艦船上的光學設備,由于工作環境較為惡劣,不但要承受100 ℃左右的高低溫差、沖擊、振動等,還有高量級、持續性的顛振。艦船的惡劣環境對視場切換機構的可靠性及穩定性是一個考驗。本文對一種工作于可見光和近紅外波段的三視場電視探測系統進行了研究。該系統采用旋轉式切換變倍機構,通過蝸輪蝸桿驅動,通過磁鐵以及柱塞等對各視場位置限位,實現了三個視場的連續快速切換,保證了各視場的光軸一致性和穩定性,同時具有較高的可靠性。
2 設計原理
2.1 系統主要技術指標
根據實際的使用需求,三視場電視探測系統的主要技術指標如下:
(1)工作波段:0.4~1.0 μm;
(2)分辨率:1 280×1 024;
(3)水平視場:5°/1.3°/0.7°;
(4)幀頻:100 Hz;
(5)光軸穩定性:典型視場方位、高低均≤0.05 mrad(全溫度范圍);
(6)光軸一致性:大視場與典型中視場間光軸的平行性誤差(方位、高低)≤0.1 mrad;小視場與典型中視場間光軸的平行性誤差(方位、高低)≤0.05 mrad。
系統對光軸穩定性及一致性提出了較高要求。光軸穩定性指的是系統在惡劣工作環境,包括高低溫、振動、沖擊等前后的光軸變化。結合光學系統解算,指標要求典型的光軸穩定性不大于10″,即不超過2.8 個像元尺寸。大小視場與典型中視場的平行性誤差分別不超過1.5 和5.2個像元尺寸[11-12]。
2.2 光學系統方案
選用某國產5.5 μm 像元尺寸探測器芯片,設計完成的光學系統如圖1 所示。光學系統的主要參數見表1。
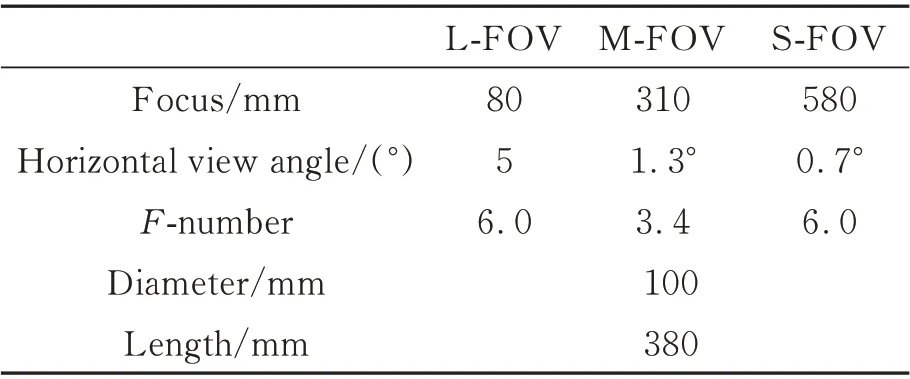
表1 三視場電視探測光學系統參數Tab.1 Parameter of optical system for TV detection system with three fields of view
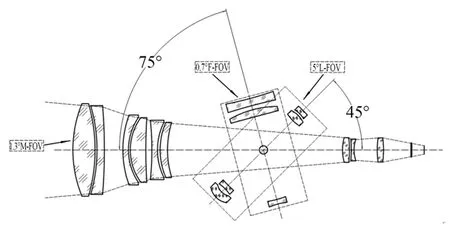
圖1 三視場電視探測光學系統Fig.1 Optical system of TV detection system with three fields of view
該系統將1.3°中視場作為典型視場,由前后固定透鏡組構成,其中最后一片透鏡作為調焦組前后移動。大小視場與中視場共用前后固定透鏡組,并通過旋轉切入、切出相應的光學部件實現3 個視場的切換。由1.3°中視場切換至0.7°小視場,需將小視場光學組件逆時針旋轉75°至光路中;由1.3°中視場切換至5°大視場,需將大視場光學組件順時針旋轉45°至光路中。鏡頭裝配過程以中視場為基準,通過調節大視場切換組與小視場切換組的偏心和傾斜實現三視場光軸的調整。在系統設計時,著重對切換鏡組光軸一致性的裝調、切換機構的穩定性和定位精度等進行了研究。
3 機械設計
系統由主框架、前固定鏡組、旋轉切換鏡組及驅動、后鏡組、調焦鏡組、濾光切換組件及探測器組件構成。其爆炸示意圖如圖2 所示。主框架是系統的支撐部件,設計為具有加強筋的箱體結構,提高其強度。旋轉切換鏡組位于鏡頭中部,通過精密軸系架設于主框架上。切換鏡筒上共安裝有4 組透鏡及兩個通光孔,其兩兩同軸分布組成3 個視場光路的一部分。設置兩套磁鐵限位組件,分別對小視場和大視場位置進行限位,通過修切墊片保證各視場光軸的一致性。柱塞球頭與旋轉鏡筒配合,對中視場位置進行限位。磁鐵限位組件和球頭柱塞可有效保證各視場的定位精度和重復定位精度。切換鏡組采用蝸輪蝸桿的驅動形式,既可以實現大的減速比,又具有自鎖作用,可以保證其旋轉到位后的光軸穩定性。調焦鏡組采用高精度凸輪驅動形式以滿足其位移的高精度要求。鏡頭尾部安裝有濾光片切換機構,通過齒輪傳動實現可見光和近紅外波段的切換。鏡頭后端與成像組件相連,電控盒位于鏡頭的側面。
圖2 三視場電視探測系統爆炸圖Fig.2 Explosive view of TV detection system with three fields of view
4 系統高穩定性設計保證
4.1 光軸一致性裝調
為保證光學鏡頭的成像質量,旋轉鏡組光軸與固定組光軸的偏心和傾斜須滿足設計要求。同時,為保證三個視場的光軸一致性要求,須將大視場、小視場旋轉鏡組光軸與前后固定組穿心至同軸。光軸調整通過經緯儀配合分劃板實現。其原理如圖3 所示。將基準分劃板采用定心工藝安裝于前固定鏡筒內,用于標定光學系統的基準光軸。在大小視場旋轉鏡筒內均設置分劃板,分劃板位于基準分劃板后端。通過經緯儀觀測前后分劃板中心十字線,調整磁鐵限位組件的位置,使旋轉鏡組分劃板的中心十字線與前鏡組分劃板重合,可認為三個視場光軸重合。圖4 為分劃板工裝及穿心現場。

圖3 光軸一致性裝調原理Fig.3 Schematic diagram of optical axis consistency adjustment

圖4 分劃板與光軸一致性裝調現場Fig.4 Reticle and optical axis consistency adjustment site
4.2 精密旋轉軸系
為實現光機結構的高精度與高穩定性,軸系經過專門設計。如圖5 所示,軸系一側采用高精度P4 級角接觸球軸承配對使用,同時采用背靠背的安裝方式,通過內環隔離,外環壓緊的方式進行預緊,軸系的徑向跳動在0.005 mm 以內。精密軸系的跨距以及溫度范圍的跨度較大,因此另一側軸系采用深溝球軸承游動的方式來提高其環境適應性。高精度的軸系使得旋轉鏡組具有很高的定位精度和重復定位精度,從而保證整個運動機構多次重復切換過程中旋轉鏡組的軸線位置始終保持不變。
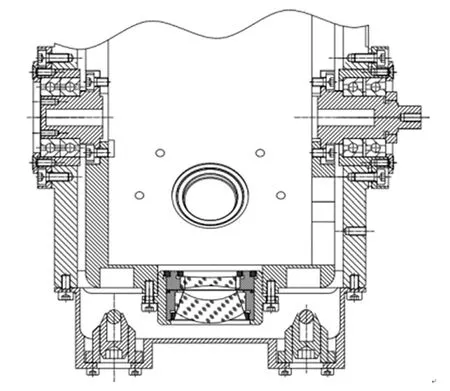
圖5 精密軸系Fig.5 Precision bearing
4.3 限位組件選型
磁鐵限位組件在系統到達大、小視場位置時保持吸附狀態。中視場時旋轉鏡組中無透鏡位于光路中,通過柱塞限位保證其穩定性。通過磁鐵限位組件和球頭柱塞對大、中、小3 個視場位置進行限位,不但可以保證視場到位后的定位精度和重復定位精度,還能有效防止旋轉切換機構反轉或者掙脫,提高系統的結構穩定性。為了滿足系統沖擊振動等環境試驗要求,選用直徑為10 mm,厚度為6 mm 的強力釹磁鐵,其接觸面產生的磁場吸力為19.6 N,同時配合一個同等吸力的磁鋼使用。球頭柱塞通過外螺紋旋擰至一定深度與旋轉鏡筒球狀凹槽配合。球頭直徑為5 mm,球頭彈力負載根據擠壓深度變化,由13.5 N至44.4 N。實際裝配過程中,柱塞旋擰深度較淺,其負載約為15 N。
4.4 旋轉切換驅動機構設計
旋轉切換鏡組采用蝸輪蝸桿減速機構作為傳動機構。對旋轉切換機構進行了運動學及動力學分析,以保證旋轉驅動機構具有足夠冗余量和使用壽命。通過合理設計減重槽和設置配重塊,保證旋轉切換鏡組質心盡可能靠近旋轉軸。優化完成后的旋轉切換鏡組如圖6 所示,其總質量為0.96 kg,其質心位置為(-0.37,-0.51,-2.6)mm,以圖示坐標原點及坐標系計算。Z軸作為旋轉軸,X,Y方向質心位置偏離旋轉軸均在1 mm 以內,滿足配平需要。以Z軸作為旋轉軸,旋轉切換鏡組的轉動慣量為J=2.7 g·m2。
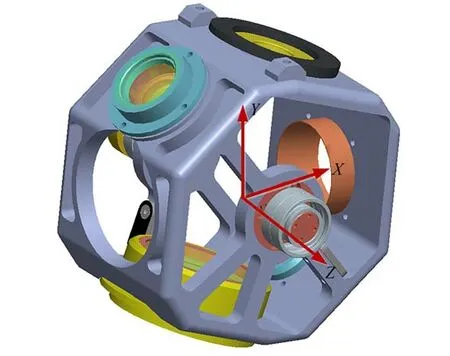
圖6 旋轉切換鏡組Fig.6 Rotary switching group
蝸輪蝸桿驅動機構不但具有較高的傳動比,還具有反向自鎖特性,可防止切換機構掙脫或者反轉,提高機構的穩定性。蝸桿模數為0.5,頭數為1,蝸輪模數為0.5,齒數為50,蝸輪蝸桿減數比為1∶50。三視場切換動作中,由中視場切換為小視場,旋轉鏡筒需轉動75°,即蝸輪需轉動5π/12,蝸桿需轉動約20.8π;由中視場切換為大視場,旋轉鏡筒需轉動45°,即蝸輪需轉動π/4,蝸桿需轉動約12.5π。以視場切換時間不大于1 s計算,電機組合輸出端的轉速應不低于630 r/min。
根據旋轉切換機構的工作原理,直流電機需要提供的轉矩包括旋轉鏡組啟動自轉所需的轉矩Mrot和克服強力釹磁鐵吸引力矩所需的轉矩Mmag,即:

旋轉切換鏡組切換行程最大為75°,即5π/12,切換時間為t=1 s,電機的加速時間為t1=0.01 s,則啟動加速度為:

其中:Fmag為釹磁鐵吸附力,Fmag=19.6 N;L為釹磁鐵安裝位置距離旋轉軸的力臂長度,L=37.5 mm。則Mmag=735 mN·m。

考慮到蝸輪蝸桿減數比為1∶50,則要求直流電機與減速箱輸出轉距21.76 mN·m。根據工程經驗,考慮到電機輸出力矩效率及低溫工況的力矩損耗,直流電機應至少輸出2 倍力矩,約為44 mN·m。
5 系統測試結果
依據上述的設計與研究結果,完成整機加工生產裝配,如圖7 所示。裝調完成后的三視場電視探測系統視場切換平穩流暢,結構穩定性高,三個視場的成像質量優良,實測小視場傳遞函數達到0.3,大視場傳遞函數達到0.5。對整機進行了振動、沖擊和高低溫試驗,在低溫-45 ℃的環境下,切換機構仍正常工作,驗證了各驅動機構的可靠性,圖8 為系統振動試驗現場圖。采用經緯儀對試驗前后典型中視場光軸穩定性和3 個視場光軸一致性進行了測量,實測數據見表2。結果表明,系統中視場光軸穩定性不超過8″,3 個視場光軸一致性均在1 個像元尺寸內,滿足指標要求。

表2 光軸穩定性及光軸一致性的測試結果Tab.2 Results of stability and consistency of axis
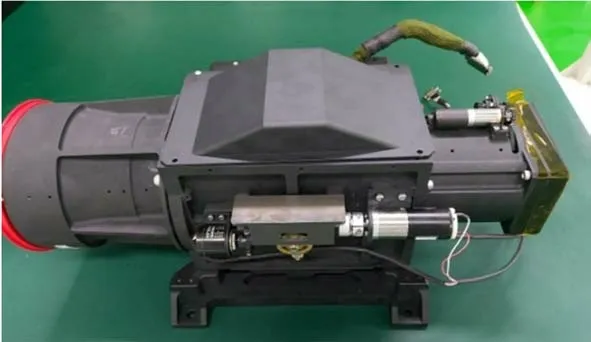
圖7 三視場電視探測系統Fig.7 Photo of TV detection system with three fields of view

圖8 振動試驗現場Fig. 8 Vibration test site
對系統的成像效果進行了一系列的實驗室及室外場景測試。圖9 為三視場電視探測系統對1.6 m 平行光管鑒別率板成像圖片,圖10 是外場試驗時拍攝的城市樓房和高塔圖片。從圖片質量分析,系統對鑒別率板條紋分辨清晰,邊緣成像銳利,圖像對比度高,表明系統的成像質量優良。
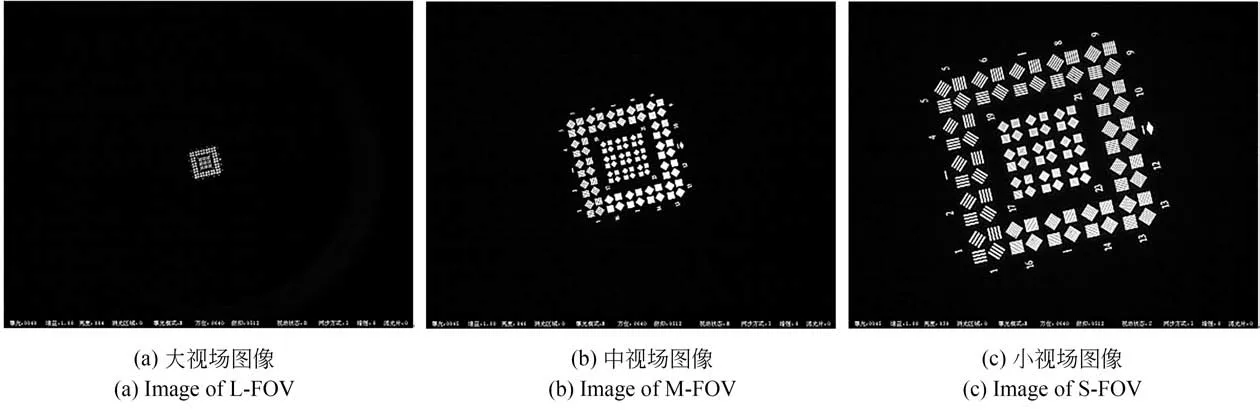
圖9 實驗室測試圖像Fig.9 Images in laboratory test
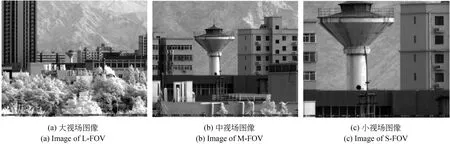
圖10 外場試驗圖像Fig.10 Images in outfield test
6 結 論
本文通過分析電視探測系統的指標,提出了采用旋轉式切換機構實現三視場切換的設計思路。基于該思路選定了光學系統方案,建立了系統的機械構型。研究了提高系統穩定性的措施,包括光軸一致性的裝調工藝,精密旋轉軸系、強力釹磁鐵以及高彈力的柱塞限位機構和具有自鎖特點的蝸輪蝸桿驅動機構,并給出了限位機構和驅動機構的選型計算過程和結果。經過振動、沖擊以及高低溫試驗驗證,系統表現出高穩定性和可靠性。測試結果表明,系統中視場光軸穩定性不超過8″,三個視場光軸一致性均在1 個像元尺寸內,滿足指標要求。最終對成像效果進行測試,系統各個視場的成像質量優良,分辨率高、探測距離遠,完全滿足使用要求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學問題(2021年4期)2021-11-05 07:02:34
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45