光電經緯儀補充條件定位方法及其應用
2021-08-30 05:37:06張廣興
測控技術 2021年8期
張廣興,張 野
(中國人民解放軍91351部隊,遼寧 興城 125001)
在飛行員定點著陸訓練過程中,光電經緯儀的測量數據已成為訓練講評和飛行質量評估的主要外測信息源之一。在飛機上安裝激光合作目標時,利用光電經緯儀提供的A,E,R三個測元,采用單站定位解算方法可得到目標的位置參數,精度可達0.2 m左右。在沒有激光合作目標的情況下,由于光電經緯儀布設在跑道兩側,激光回波位置可能在機頭也可能是機尾,導致數據處理結果的精度較差,不能滿足飛行講評和飛行質量評估的要求,此時單臺經緯儀提供A和E兩個有效測元不能提供滿足講評精度的定位解算結果。雖然可以采用雙站交匯的方法提供高精度的數據處理結果[1],但日飛行架次多且時間長,數據處理過程中需要判讀的圖像信息量巨大,而且雙站交匯的數據處理流程相對復雜。為滿足飛行講評要求,需要在較短的時間內提供處理結果,這給數據處理人員帶來了巨大的工作壓力。為提高數據處理速度,應充分利用已測得的光電經緯儀測元信息,提供滿足訓練講評和飛行質量評估精度的數據,需要一種既充分利用經緯儀現有測元又能減小判讀和數據處理工作量的定位解算方法。
光電經緯儀是傳統的外測裝備,主要應用于導彈飛機等裝備試驗的外部參數測量和視頻信息的獲取,在對這些裝備進行測量時,為保證測量的精度和跟蹤的可靠性,往往布設多臺套多類型測量設備。由于有冗余的測元和多類型傳感器的測量數據可用,為提高測量精度應充分利用已獲取的測元數據,在數據處理過程中,經常采用多測元融合數據處理技術,以滿足定位解算條件或提高數據處理精度[2-10]。但這些方法的處理過程比較煩瑣,計算量也比較大,適合于對數據處理時效要求不高、數據處理比較精細的情況[11-12],基本不考慮測元不足條件下的定位解算問題。怎樣利用單臺光電經緯儀有效的方位角A和俯仰角E對被測目標進行定位解算,提供滿足一定精度的數據處理結果,到目前為止還沒有可借鑒的解算方法和應用場景。
本文根據定點著陸訓練時飛機在下滑道內的運動特點,利用單臺經緯儀的方位角A和俯仰角E兩個測元,結合補充定位條件對飛機進行定位解算,可提供滿足飛行講評和飛行質量評估精度要求的數據處理結果,充分利用了獲取的有效測量信息,解決了光電經緯儀測元不足條件下的定位解算問題,提高了數據處理的效率。
1 飛機定點著陸訓練運動狀態分析
1.1 跑道坐標系定義
跑道坐標系是一種站心坐標系,主要用于描述飛機相對于跑道上某個固定點位的運動情況,以確定飛機相對于這個固定點位的位置。它是以跑道上固定點的鉛垂線、水準面為基準建立的坐標系,通常以Op-XYZ表示,如圖1所示。

圖1 跑道坐標系示意圖
跑道坐標系的原點Op通常位于跑道中線定點著陸區,與飛機理想著陸點相重合,X軸位于過原點Op的水平面內,由原點Op指向跑道的延伸方向,其方向為從大地北順時針向旋轉αo(大地北與跑道延伸方向的夾角通常與飛機的起飛方向一致);Y軸取過原點Op的鉛垂線,向上為正;Z軸位于過坐標系原點的水平面內,與X軸、Y軸構成右手直角坐標系,跑道坐標系是垂線坐標系。
1.2 飛機在跑道坐標系中的運動特點
在定點著陸訓練過程中,從飛機對準跑道進入下滑道到著陸的運動狀態將直接決定飛機是否準確降落到指定位置,是訓練講評和飛行質量評估關注的重點區間。飛機進入下滑道后,飛機前輪基本是對準跑道中線的,即沿跑道坐標系的X軸方向飛行,沿Y軸方向垂直下降,飛行員根據燈光、對中和著陸仰角情況,按照指揮員口令不斷調整飛機降落姿態[13-14]。根據跑道坐標系定義,X軸與跑道中線重合,飛機機頭的運動方向即跑道坐標系的X軸方向,所以在理論上當飛機進入下滑道在跑道坐標系中運動時,飛機在X軸和Z軸構成的平面內運動,即Z軸方向上的位置坐標為z=0。通過對二維飛行軌跡圖進行重疊繪制可以發現,在下滑道階段不同圈次的軌跡在此階段差異很小,表現出一定的聚集現象。圖2~圖4為某架機3個架次的X-Z二維圖。圖中數據為雙站交匯結果,判讀部位為前起落架某地點。
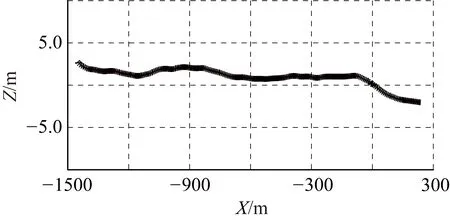
圖2 第1架次X-Z數據圖
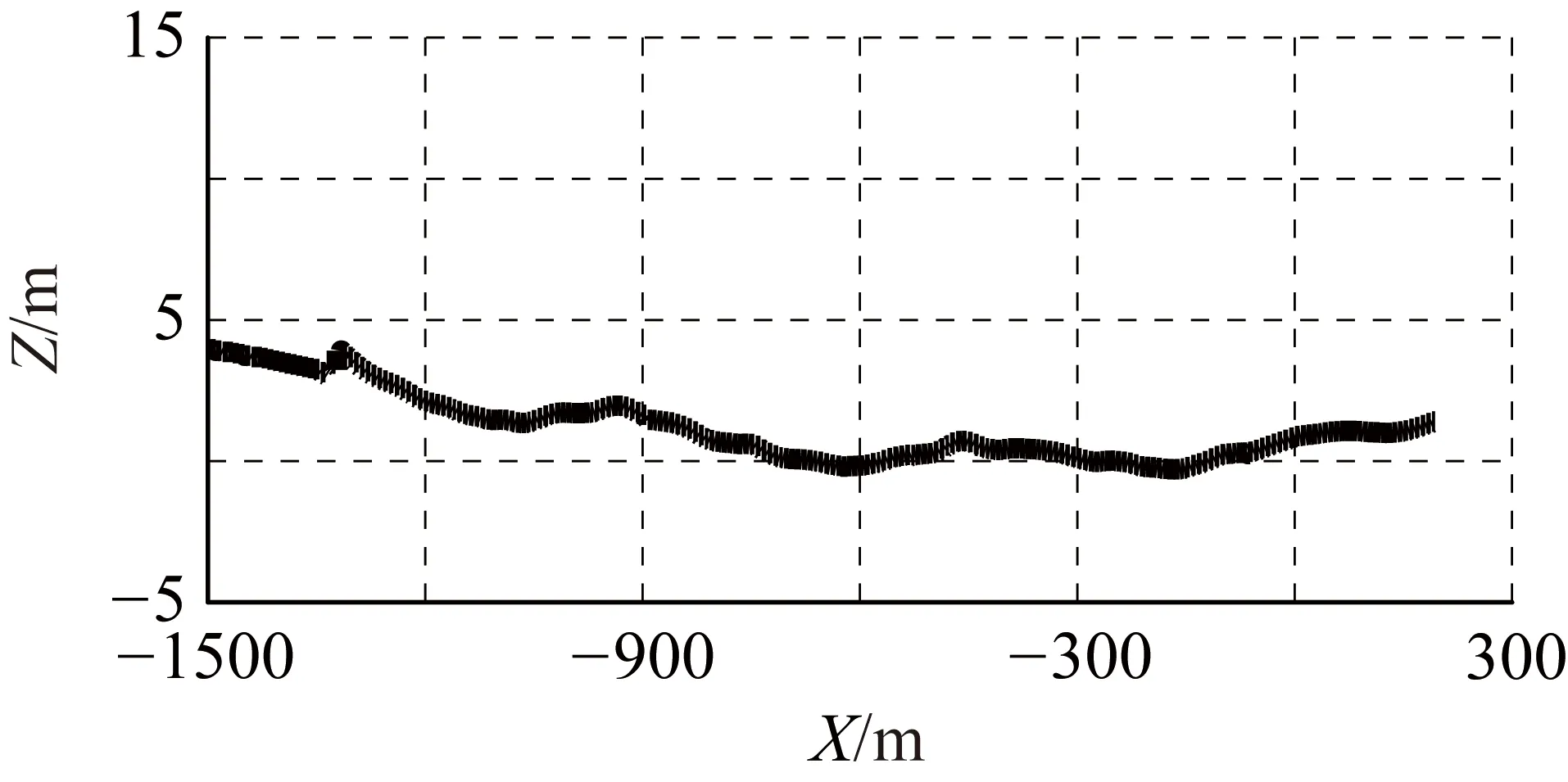
圖3 第2架次X-Z數據圖
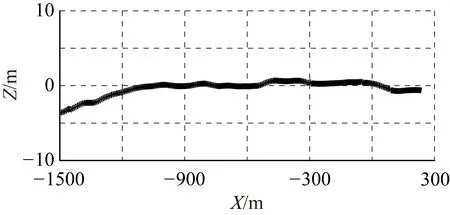
圖4 第3架次X-Z數據圖
從圖2~圖4可以發現,飛機進入下滑道后,在-1500~-1200 m范圍內,飛機Z方向上的變化范圍在在-5~5 m之間;從-1200 m到前輪著地飛機Z方向的位置數據在1 m范圍內變化,即在跑道坐標系X軸和Z軸構成的平面內運動,Z方向在0值附近波動且幅值很小,越接近跑道坐標系原點(即理想著陸點)z值越接近0。
2 補充定位的數學模型
由于經緯儀布設在跑道側面,在有激光測距的情況下,經緯儀的激光測距機接收到的回波信息可能來自機頭也可能來自機尾,所以激光的回波誤差較大,數據處理精度不能滿足飛行講評需求。根據飛機在跑道坐標系中的運動特點,將飛機在跑道坐標系中Z方向的位置參數作為已知量,建立補充定位的數學模型和算法。
(1)建立主光軸在測量坐標系下的點法式方程。
設Oc為測量坐標系的原點,某臺光電經緯儀測得目標在測量坐標系中的方位角和高低角分別為A和E。射線OcL為經緯儀的主光軸,即高低角E的終邊。M為目標,則目標M一定在OcL上,如圖5所示。
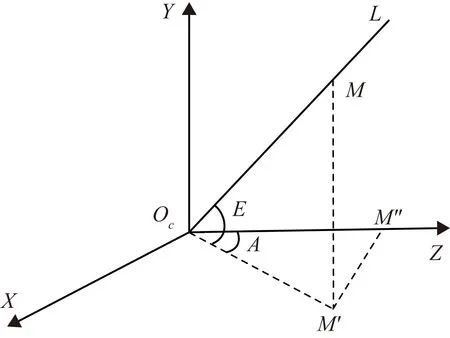
圖5 目標M在測量坐標系下主光軸上的情況

K=[cosE·cosA,sinE,cosE·sinA]T
(1)
設目標M在測量坐標系下的位置參數為M(xc,yc,zc),由于OcL過測量坐標系原點Oc,所以可得到直線OcL在測量直角坐標系下的點法式方程為
(2)
前面假設將飛機在跑道坐標系中Z方向的位置參數作為已知量,所以將直線OcL在測量直角坐標系下的式(2)轉換為跑道坐標系下的方程。
(2)求光電經緯儀測量坐標系原點在跑道坐標系下的坐標。
設跑道坐標系原點的大地坐標為O(BoLoHo),光電經緯儀測站坐標系原點的大地坐標為Oc(Boc,Loc,Hoc),跑道坐標系的X軸與大地北方向的夾角為αo(如圖1所示),根據文獻[1]提供的坐標轉換方法,可得到光電經緯儀測量坐標原點Oc(Boc,Loc,Hoc)在跑道坐標系下的坐標,記為(xoc,yoc,zoc)。
(3)求射線OcL在跑道坐標系下的方程。
設射線OcL在跑道坐標系中的單位方向向量的表示為P=[p1,p2,p3]T,利用文獻[1]提供的測量直角坐標到發射坐標系(這里定義為跑道坐標)的轉換方法,P=[p1,p2,p3]T可通過下面的坐標轉換得到,即
(3)
式中,
設飛機在跑道坐標系下的位置為M(x,y,z),已知射線OcL經過光電經緯儀主光軸過測量坐標原點,在跑道坐標系中的坐標為(xoc,yoc,zoc),P=[p1,p2,p3]T可通過式(3)求得,由直線的點法式方程可求得OcL在跑道坐標系中的方程為
(4)
(4)確定補充條件求取目標在跑道坐標系下的位置參數。
在式(4)中,只要知道飛機在跑道坐標系統下x,y,z中的任何一個值,即可求得式(4)的解,即目標在跑道坐標系下的位置坐標。根據前面飛機定點著陸訓練的運動特點分析可知,飛機在定點著陸過程中Z方向的值在X軸附近波動,在沒有其他信息源做補充的情況下,根據飛機在跑道坐標系中的運動特點,可以令z為常值0,即在下滑道中飛機在跑道坐標系中的位置參數[x,y,z]T=[x,y,0]T,此時式(4)的求解問題可簡化為
(5)
而zoc為已知,根據式(5)可求得飛機在跑道坐標系中的x和y。
3 數據處理結果分析
下經緯儀雙站交匯的事后數據處理精度約為0.1 m,飛機在下滑道內-1200 m到理論著陸點的區間內,外測數據的精度達到米級即可滿足飛行訓練講評要求。取飛機跑道東側站點測得的方位角和俯仰角進行補充定位解算,得到飛機在下滑道中的位置,將雙站定位數據處理結果作為真值,將補充定位解算得到(xb,yb,zb)分別與真值(xs,ys,zs)(雙站交匯解算結果)做一次差進行對比分析。對比結果如圖6~圖9所示。
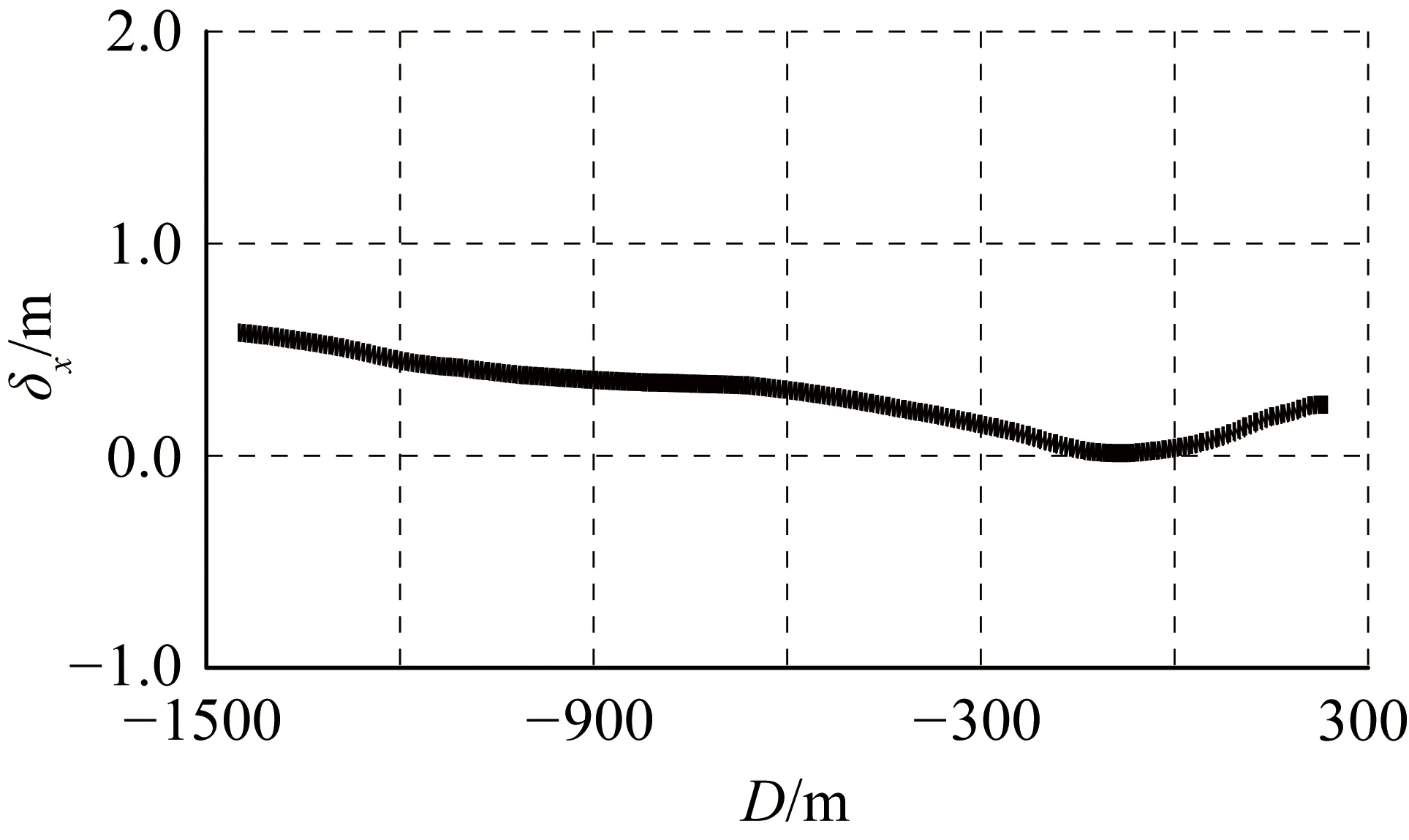
圖6 第1架次X方向的一次差圖
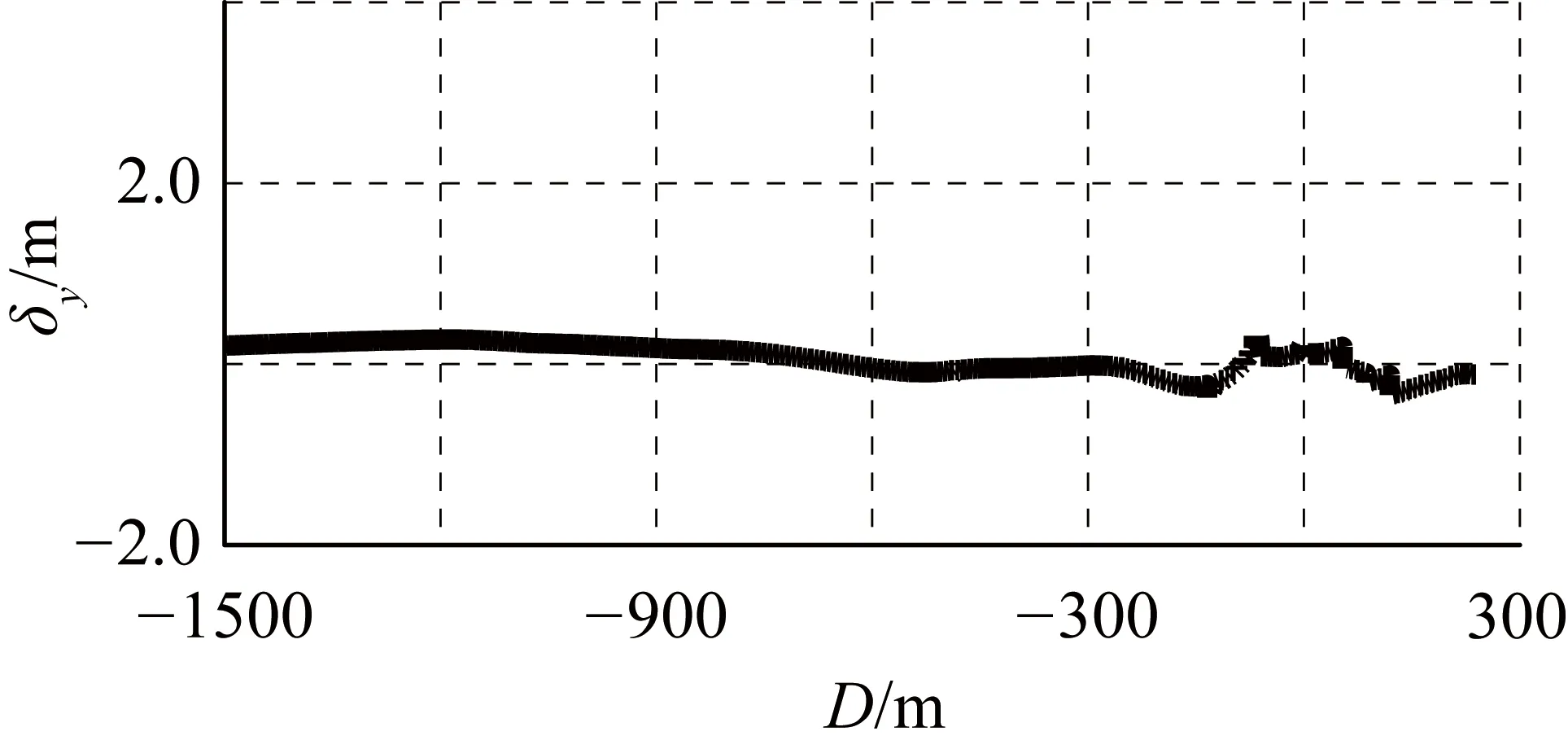
圖7 第1架次Y方向的一次差圖
圖8 第2架次X方向的一次差圖
圖9 第2架次Y方向的一次差圖
圖6、圖8的縱坐標為X方向真值與補充定位結果的一次差,即δx=xb-xs,圖7、圖9的縱坐標為Y方向真值與補充定位結果的一次差,即δy=yb-ys。,其中(xs,ys,zs)為雙站定位解算結果(真值),(xb,yb,zb)為補充定位解算結果。
表1為對40個架次雙站交匯數據與補充定位數據進行對比分析得到的統計結果。表1中δz=zs表示Z方向的一次差。
表1 補充定位結果與真值一次差的統計表 單位:m
從圖6~圖10以及表1的結果可以看到,補充定位計算得到數據與雙站交匯計算得到的定位解算結果在X方向和Y方向都存在一定的誤差,飛機距理想著陸點為-1500~-1200 m時,δx的取值范圍在0.11~1.05 m范圍內波動,δy在0.25~0.80 m范圍內波動;飛機距理想著陸點-500~0.0 m時,δx的取值范圍在0.12~0.36 m范圍內波動,δy在0.05~0.23 m范圍內波動,根據飛行講評和飛行質量評估的數據處理精度要求,誤差在可接受范圍內,在沒有其他信息提供精確定位結果的情況下,能夠滿足下滑道到著陸點之間飛行講評和飛行質量評估的需求。
4 結束語
本文提出的方法簡單、計算量較小,編程實現容易,數據處理流程少,可充分利用已采集到的有效測元數據,還可減少光電經緯儀圖像數據判讀的工作量,比較適合飛行訓練架次多、數據判讀和處理工作量大的情況。從數據分析和實際應用結果來看,能夠提供滿足飛行講評和飛行質量評估精度要求的數據處理結果。需要說明的是,在數據處理中還可利用中心線相機視頻對著陸過程中飛機在Z方向的偏離量進行評估,剔除掉在定點著陸訓練過程中Z方向偏差較大的起落架次,保證參與數據處理的原始測元質量,進一步提高處理后的數據精度。
猜你喜歡
環球時報(2022-05-30)2022-05-30 15:16:57
心理學報(2022年4期)2022-04-12 07:38:02
計算機應用(2022年2期)2022-03-01 12:33:42
水泵技術(2021年3期)2021-08-14 02:09:20
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
中國慣性技術學報(2015年1期)2015-12-19 13:12:17