重型車輛的定點(diǎn)行駛控制策略研究
2021-08-28 09:49:30江奎李炎亮楊國平劉景鋒
農(nóng)業(yè)裝備與車輛工程 2021年8期
江奎,李炎亮,楊國平,劉景鋒
(201620 上海市 上海工程技術(shù)大學(xué) 機(jī)械與汽車工程學(xué)院)
0 引言
隨著5G 時(shí)代的到來,智能駕駛作為汽車行業(yè)的主要發(fā)展方向之一,受到各汽車公司和高校的重視,成為當(dāng)下熱門的研究課題。智能駕駛主要分為感知、決策、控制3 部分。感知部分主要通過車輛搭載的視覺、雷達(dá)等多傳感器的融合實(shí)現(xiàn)對(duì)周圍環(huán)境物體的精確識(shí)別,然后將處理的信號(hào)傳輸給ADAS 控制器。控制器根據(jù)設(shè)計(jì)的控制算法進(jìn)行全局及局部的路徑規(guī)劃,給出最優(yōu)決策,最終通過設(shè)計(jì)的控制算法實(shí)現(xiàn)無人駕駛功能。
本文重點(diǎn)分析路徑跟蹤下的定點(diǎn)行駛功能。文獻(xiàn)[1]提出基于時(shí)間建立三次參數(shù)方程并結(jié)合線性二次型方程構(gòu)成反饋控制實(shí)現(xiàn)主車的路徑跟蹤功能;文獻(xiàn)[2]提出了MPC 算法,以車速及航向偏差作為輸入、以預(yù)瞄距離作為輸出,實(shí)現(xiàn)整車的路徑跟蹤功能;文獻(xiàn)[3]基于車輛動(dòng)力學(xué)模型,提出一種帶有前饋補(bǔ)償和反饋的最優(yōu)控制策略;文獻(xiàn)[4]基于橫擺角度設(shè)計(jì)PID 控制算法,實(shí)現(xiàn)在道路曲率不固定條件下的整車路徑跟蹤功能;文獻(xiàn)[5]提出了一種自適應(yīng)的智能元啟發(fā)式幾何控制算法的開發(fā);文獻(xiàn)[6]提出了采用一種改進(jìn)的 VFH 方法進(jìn)行局部避障路徑規(guī)劃和道路人工勢(shì)場(chǎng)法實(shí)現(xiàn)目標(biāo)路徑跟蹤控制,并通過仿真證明控制算法的有效性;文獻(xiàn)[7]基于純跟蹤控制算法,實(shí)現(xiàn)軌跡跟蹤的良好控制。
針對(duì)目前的路徑跟蹤問題,為實(shí)現(xiàn)在不同路況下精確的自主跟蹤功能,本文在目前理論研究的基礎(chǔ)上,提出整套的模型架構(gòu)及控制策略,設(shè)計(jì)了一種新的路徑跟蹤控制,實(shí)現(xiàn)了重型車輛在非道路化自主路面下的定點(diǎn)行駛功能。
1 整車二自由度模型
將整車簡(jiǎn)化為更加容易分析的理想化二自由模型,忽略轉(zhuǎn)向系、懸架和空氣阻力的影響,如圖1 所示。

圖1 二自由度車輛模型Fig.1 Two-degree-of-freedom vehicle model
圖1 中:V——車輛行駛速度;li——第i 軸到車身質(zhì)心的距離;δi——第i 軸車輪的轉(zhuǎn)向角;u、v——質(zhì)心速度V 在x、y 軸的分量;ωr——車輛繞z軸的角速度;β——車輛質(zhì)心處的側(cè)偏角。
本文的實(shí)際項(xiàng)目中,重型車輛為三橋,式(1)為多橋轉(zhuǎn)向車輛橫向動(dòng)力學(xué)普適公式。

只有前輪轉(zhuǎn)向的模式下,有δi=0,i ≠1,因此式(2)可以化簡(jiǎn)為

2 控制策略
在建立主車二自由度模型的基礎(chǔ)上,實(shí)現(xiàn)定點(diǎn)行駛功能的整個(gè)功能架構(gòu)如圖2 所示。

圖2 智能駕駛定點(diǎn)行駛功能流程圖Fig.2 Intelligent driving fixed-point driving function flowchart
首先將慣導(dǎo)傳感器采集的經(jīng)緯度信息存儲(chǔ)在MATLAB 中,通過Lookup Table 可以實(shí)現(xiàn)文件經(jīng)緯度的讀取,然后將讀取到的經(jīng)緯度信息進(jìn)行濾波過濾處理,消除噪聲和錯(cuò)誤點(diǎn)的影響。將傳感器的輸入信號(hào)通過模型的控制算法計(jì)算,最終求得實(shí)時(shí)的期望車速及期望轉(zhuǎn)角。初步生成的代碼不能直接作為最終的控制算法,需要將生成的代碼進(jìn)行等效性測(cè)試及模型覆蓋率測(cè)試,最終將優(yōu)化通過的代碼導(dǎo)入主車搭載的工控機(jī)設(shè)備運(yùn)行。在編譯通過及硬件設(shè)備良好的條件下可以控制主車的車速及轉(zhuǎn)向,實(shí)現(xiàn)重型車輛在非道路化條件下的定點(diǎn)行駛功能。
根據(jù)式(3)可以求出每一時(shí)刻與目標(biāo)點(diǎn)的實(shí)時(shí)距離及方位角信息

方位角的計(jì)算公式

式中:X1——初始點(diǎn)經(jīng)度;Y1——初始點(diǎn)緯度;X2——目標(biāo)點(diǎn)經(jīng)度;Y2——目標(biāo)點(diǎn)緯度。計(jì)算時(shí),首先將經(jīng)緯度轉(zhuǎn)化為弧度再代入上述公式。

圖3 實(shí)時(shí)位置與目標(biāo)點(diǎn)的實(shí)時(shí)距離模型計(jì)算Fig.3 Real-time distance model calculation between real-time position and target point
式(4)中,地球半徑取6 371 km,地球上的同一經(jīng)線上緯度相差1°,實(shí)際距離相差111 km,上述公式計(jì)算出的結(jié)果與谷歌地球給出的距離偏差在0.5%以下。長(zhǎng)距離計(jì)算時(shí),偏差則可以降至0.01%以下,求算的距離越大,偏差越小。因此,所求的結(jié)果滿足項(xiàng)目的實(shí)際需求。
3 定點(diǎn)行駛功能實(shí)現(xiàn)
基于控制策略的研究基礎(chǔ),借助MATLAB搭建定點(diǎn)行駛功能的控制算法模型,該控制模型主要包含傳感器信號(hào)輸入、控制算法和信號(hào)輸出模塊等3 部分。
3.1 信號(hào)輸入模塊
信號(hào)輸入模塊的主要功能是將主車搭載的視覺、毫米波雷達(dá)、慣導(dǎo)、超聲波雷達(dá)等傳感器信號(hào)封裝成需要的信號(hào)接口,底層傳感器信號(hào)引入成功后,將輸入信號(hào)的接口導(dǎo)入到MATLAB模型,具體流程如圖4 所示。
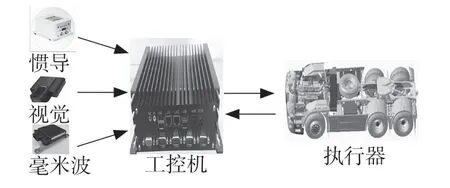
圖4 傳感器設(shè)備信號(hào)引入流程圖Fig.4 Flow chart of sensor device signal introduction
如圖4 所示,將各類傳感器的各類信號(hào)引入,生成.h 頭文件,其中,工控機(jī)搭載Ubuntu 的系統(tǒng)版本為Ubuntu 16.04-x86_x64,同時(shí),創(chuàng)建Database CAN 數(shù)據(jù)庫文件。dbc 文件描述了在CAN 網(wǎng)絡(luò)上的各類報(bào)文信息,是通訊的核心文件。通過創(chuàng)建dbc 文件可實(shí)現(xiàn)整個(gè)CAN 網(wǎng)路節(jié)點(diǎn)無差錯(cuò)的協(xié)同同步開發(fā),使輸入信號(hào)的收發(fā)及測(cè)試簡(jiǎn)單化。同時(shí),dbc 文件將引入的傳感器信號(hào)生成全局變量,配置MATLAB 模型輸入輸出信號(hào)接口,最終實(shí)現(xiàn)傳感器信號(hào)的導(dǎo)入與控制算法信號(hào)的輸出。
3.2 控制算法模塊
主車在不同路面上行駛時(shí),各類傳感器較高的靈敏度和由路面不平引起的抖動(dòng)會(huì)導(dǎo)致輸入信號(hào)實(shí)時(shí)波動(dòng),這種信號(hào)波動(dòng)屬于正常波動(dòng),但是這種波動(dòng)會(huì)影響駕駛員真實(shí)的駕駛反應(yīng)意圖。為了去除這些影響,得到更加真實(shí)的傳感器的反應(yīng)輸入信號(hào),在利用傳感器信號(hào)源之前需要進(jìn)行輸入信號(hào)抖動(dòng)的消除,功能示意圖如圖5 所示。

圖5 傳感器消抖功能示意圖Fig.5 Schematic diagram of sensor de-jitter function
在圖6 中,根據(jù)上述消抖理論建立模型,實(shí)現(xiàn)信號(hào)的消抖處理。

圖6 傳感器消除抖動(dòng)模型圖Fig.6 Sensor de-jitter model diagram
在控制算法中,根據(jù)主車實(shí)時(shí)采集到的位置、航向角和目標(biāo)點(diǎn)的位置信息可以求得主車實(shí)時(shí)的姿態(tài)及相對(duì)方位角,根據(jù)主車與目標(biāo)點(diǎn)的相對(duì)方位角實(shí)現(xiàn)對(duì)整車的控制。參見圖7。

圖7 主車實(shí)現(xiàn)定點(diǎn)行駛功能圖Fig.7 Function chart of main vehicle to realize fixed point driving
當(dāng)主車進(jìn)入智能駕駛狀態(tài)時(shí),實(shí)現(xiàn)主車的啟動(dòng)、加速、減速和停止功能。初始時(shí)刻,設(shè)定主車啟動(dòng)車速的閾值2 m/s;當(dāng)達(dá)到啟動(dòng)車速后,跳轉(zhuǎn)到加速模塊;車速達(dá)到設(shè)定閾值6 m/s 后,進(jìn)行勻速行駛。根據(jù)采集的主車的實(shí)時(shí)位置、偏航角等信息實(shí)時(shí)測(cè)得距離目標(biāo)點(diǎn)的距離信息,通過搭建的控制算法可以實(shí)現(xiàn)整車定點(diǎn)行駛功能。
在實(shí)際運(yùn)行工況時(shí)會(huì)發(fā)生主車無法精確停靠在目標(biāo)點(diǎn)位置的情況,共有3 種狀態(tài)。第1種狀態(tài):主車還未停靠目標(biāo)點(diǎn)位置就已經(jīng)停止運(yùn)行;第2種狀態(tài):理想狀態(tài)下主車精確停靠在目標(biāo)點(diǎn)位置,主車停靠的位置與目標(biāo)點(diǎn)的偏差前后左右不超過0.5 m;第3 種狀態(tài):主車越過目標(biāo)點(diǎn)的停靠位置。針對(duì)上述情況,設(shè)計(jì)了二次補(bǔ)位功能實(shí)現(xiàn)主車的精準(zhǔn)停靠,達(dá)到第2 種理想狀態(tài)。
大量實(shí)驗(yàn)證明,當(dāng)主車的當(dāng)前位置距離目標(biāo)點(diǎn)位置20 m 外,執(zhí)行正常的啟動(dòng)加速邏輯行駛功能;保持一段勻速行駛后,當(dāng)主車的當(dāng)前位置距離目標(biāo)點(diǎn)位置15 m 時(shí),執(zhí)行補(bǔ)位功能。例如:當(dāng)主車出現(xiàn)上述第1 種狀態(tài)時(shí),會(huì)執(zhí)行二次啟動(dòng)加速補(bǔ)位功能。當(dāng)實(shí)際出現(xiàn)第3 種狀態(tài)時(shí),會(huì)進(jìn)行主車倒車補(bǔ)位功能。具體控制算法圖8模型所示。

圖8 定點(diǎn)行駛補(bǔ)位功能Fig.8 Fixed-point driving compensation function model diagram
3.3 信號(hào)輸出模塊
信號(hào)輸出模塊的主要功能是將控制算法求得的實(shí)時(shí)期望車速和期望轉(zhuǎn)角數(shù)值轉(zhuǎn)化為整車CAN對(duì)應(yīng)的輸出信號(hào)。在輸出信號(hào)模塊中,也需實(shí)時(shí)引出觀測(cè)量的值,實(shí)現(xiàn)對(duì)控制算法每一部分的觀測(cè)驗(yàn)證,便于根據(jù)實(shí)際情況修正各子模塊的控制算法。
4 結(jié)果驗(yàn)證分析
4.1 虛擬結(jié)果仿真分析
在TruckSim 軟件中配置重卡的實(shí)際整車參數(shù),包括整車質(zhì)量、長(zhǎng)寬高、質(zhì)心的位置軸距轉(zhuǎn)動(dòng)慣量和側(cè)偏剛度等,然后進(jìn)行駕駛員模型及周圍道路環(huán)境的構(gòu)建,包括道路狀況的設(shè)置,最后確定Simulink 和TruckSim 的接口的配置。聯(lián)合仿真簡(jiǎn)圖如圖9、圖10 所示。

圖9 TruckSim&Simulink 聯(lián)合仿真圖Fig.9 TruckSim&Simulink joint simulation diagram

圖10 虛擬仿真分析圖Fig.10 Virtual simulation analysis diagram
4.2 實(shí)車驗(yàn)證分析
在Simulink 中進(jìn)行模型的搭建及代碼的生成,并將生成的代碼進(jìn)行等效性及模型覆蓋率測(cè)試后,最終將優(yōu)化后的代碼導(dǎo)入工控機(jī)安裝的Linux 平臺(tái)運(yùn)行。經(jīng)過在實(shí)驗(yàn)區(qū)的多次實(shí)驗(yàn),每次實(shí)驗(yàn)采用:GPS/慣性導(dǎo)航定位設(shè)備,精度達(dá)到1 cm 級(jí)別。實(shí)驗(yàn)數(shù)據(jù)分析通過CANalyzer 設(shè)備進(jìn)行讀取。
從圖11 中可以看出,當(dāng)CMD_State=1,處于智能駕駛條件下,主車的實(shí)際車速先啟動(dòng)加速保持一段距離到距離目標(biāo)點(diǎn)距離15 m 時(shí),執(zhí)行補(bǔ)位功能邏輯,到達(dá)設(shè)定的目標(biāo)位置后,退出自動(dòng)駕駛狀態(tài),CMD_State=0,車輛停靠到目標(biāo)點(diǎn),實(shí)現(xiàn)了定點(diǎn)行駛功能。
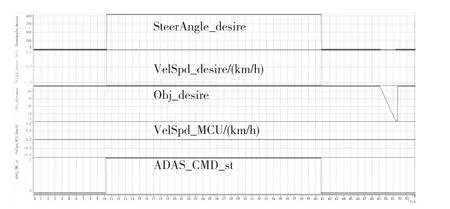
圖11 實(shí)車驗(yàn)證定點(diǎn)行駛效果圖Fig.11 Real vehicle verifying fixed-point driving effect map
整車實(shí)際的停靠位置與目標(biāo)位置的偏差實(shí)驗(yàn)數(shù)據(jù)見表1。

表1 數(shù)據(jù)分析Tab.1 Data analysis
通過多次實(shí)驗(yàn)隨機(jī)取3 次數(shù)據(jù)并分析得出結(jié)論,本文提出的控制算法可以穩(wěn)定地實(shí)現(xiàn)定點(diǎn)行駛功能,魯棒性較好,達(dá)到定點(diǎn)行駛目標(biāo)要求。
5 結(jié)論
針對(duì)重型車輛在非道路狀況下的自動(dòng)停靠偏離問題,本文設(shè)計(jì)的控制算法可以實(shí)現(xiàn)路徑跟蹤下的定點(diǎn)行駛功能。通過實(shí)車驗(yàn)證分析,車輛的最終停靠位置點(diǎn)與目標(biāo)點(diǎn)的距離偏差不超過1 m。相比于傳統(tǒng)的算法,本文的整車模型控制算法不僅提高了定點(diǎn)行駛功能的精確度,魯棒性也得到了提高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中華詩詞(2022年6期)2022-12-31 06:41:24
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
中國科技論壇(2017年7期)2017-07-25 08:49:53
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
