固態雷達+虛擬AIS: 解決船舶可見最后盲點
2021-08-23 01:50:13毛新健任子俊
航海 2021年4期
毛新健 任子俊
摘要:為了保障船舶航行安全,降低船舶碰撞風險,解決惡劣天氣能見度不良情況下,AIS船舶與未安裝AIS船舶可見的最后盲點,東海航海保障中心在洋山港開展基于固態雷達+虛擬AIS的小目標系統試點建設。
關鍵詞:固態雷達;虛擬AIS
為保障船舶航行安全,維護船舶通航秩序,降低船舶碰撞風險,船舶可見無疑是最主要的保障手段。隨著信息技術發展,船舶可見也由原始的目視可見發展為在信息系統中實現船舶可見,極大擴展了船舶可見范圍,而雷達和AIS無疑是實現船舶可見的兩大關鍵系統。雷達依托發射電磁波對范圍內的目標進行照射并接收其回波,由此獲得目標至雷達間的距離、距離變化率、方位、高度等信息,即發現目標并測定空間位置,從而提供給航行船舶或海事監管實現目標可見。AIS船舶自動識別系統,通過GPS將船位、船速、航向等船舶動態信息,結合船名、呼號、裝載貨物等船舶靜態資料,由VHF甚高頻向附近水域廣播,使鄰近船舶及岸臺能及時掌握附近水域所有船舶信息,從而實現船舶可見,有效保障船舶航行安全。
盡管雷達和AIS已是目前實現船舶可見最主流的信息系統,但都存在著一定缺陷。傳統航海雷達使用最為廣泛的脈沖磁控管雷達,在雨雪海浪天氣條件下雷達回波中的雜波剔除能力不如人意,因此惡劣天氣情況下,對快速移動中的小目標難以精確探測,無法實現周邊水域船舶目標完全可見。至于AIS,盡管不受天氣狀況影響,但由于國際海事組織以及我國海事部門盡管已對各類船舶強制性安裝AIS終端作了明確要求,但目前仍不是所有船舶都安裝了AIS終端,安裝了AIS終端船舶和并未安裝AIS終端船舶無法依托AIS實現可見,仍然存在最后盲點。
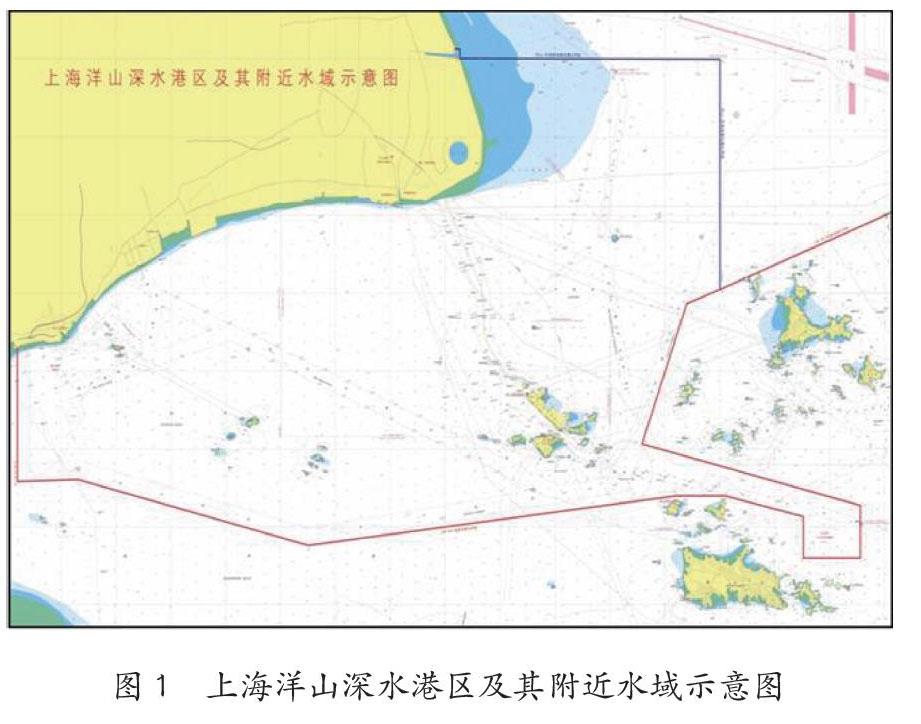
盡管在常規情況下,通過現有雷達和AIS系統已經可以實現船舶可見,有效降低船舶碰撞風險,但在一些特殊水域,如上海洋山港,船舶流量密集,各類船舶聚集交匯,通航條件較為復雜,依然存在一定的安全隱患,如圖1所示。
洋山港是我國推進“一帶一路”倡議的重要支點,在上海國際航運中心建設中起到核心支撐作用。洋山港位于東亞季風盛行地區,全年風向多樣風速較大,波浪潮汐相對也大,容易出現大霧雨雪天氣,能見度不良情況頻繁,受臺風影響也極為顯著,所以對傳統雷達干擾較為嚴重,如圖2所示。洋山水域作為沿海海上干線南北聚集交匯航路,周邊密布傳統漁業作業區,從而形成大、中、小型船舶和漁船水上交通聚集交匯狀況,船舶通航密集。而小型漁船AIS終端安裝率較低,因此安裝AIS的進出港船舶與未安裝AIS的漁船無法可見,存在船舶碰撞的安全風險。
東海航海保障中心以實踐國家戰略、服務航海保障為己任,依托新型固態雷達和虛擬AIS技術,完成洋山港水域小目標系統的試點建設,一定程度上解決洋山港水域船舶可見避碰最后盲點的安全隱患。
1 固態雷達
固態雷達是近年來已得到迅速發展的一種新型雷達,具有體積小、功能多、機動性強、可靠性高的優勢,常用于機載、艦載和地面雷達,如圖3所示。
傳統的脈沖磁控管雷達,通過調制器產生的調制脈沖傳送至磁控管,引發磁控管產生大功率超高頻率的脈沖波,這種射頻脈沖波經過天線向四周發射,在射碰目標實體后彈回的反射波再次被天線接收,后端接收機對反射波信息經過處理,將信號以視頻信號的方式顯現出來。因此傳統脈沖磁控管雷達中最主要的部位就是磁控管。而新型固態雷達卻沒有磁控管,取而代之的是固態器件。固態雷達信號發射和傳統雷達一樣,但接收后的信號不僅要經過接收機處理還需要經過脈沖壓縮器的處理,之后才能將信息呈現在顯示屏上。
傳統脈沖磁控管雷達發射的是大功率脈沖波,功率可覆蓋1 kW~3 MW;而新型固態雷達發射的是低功率射頻脈沖,最大功率可低至200 W左右。發射的信號經過接收機和脈沖壓縮器處理,形成高倍數的壓縮信號,可以與傳統雷達所發射的大功率高頻率的射頻信號相媲美。
雷達探測距離可分為遠、中、近不同距離,不同的探測距離要求也不一樣,固態雷達可發射長、中、短不同的特定射頻脈沖來滿足這些要求。同時,為使脈沖更容易被壓縮,通常采用脈沖寬度和編碼混合的方法,這樣可以保證每次發射的脈沖在長度和編碼上都有差異。在處理回收脈沖信號時,可以高效判斷目標的存在狀況。
此次在洋山港水域安裝應用的新型固態雷達相比傳統脈沖磁控管雷達有了巨大的改善,不僅可檢測雷達與目標之間的相對速度,而且能夠十分有效地將回波中的雜波剔除出去,從而確保在海浪雨雪等惡劣情況下,對移動中的小目標進行精確探測。
2 虛擬AIS
AIS是通過VHF海上移動頻段通信協議交換航行數據的通信系統,通過自動發送和接收船舶信息實現了船舶可見,現已成為船岸、船船之間的海事安全與航海保障最重要的助航系統。
根據國際電信聯盟M.1371規定,AIS利用預定電文進行通信,保證全球通用。標準的AIS電文分為27類,不同的電文代表不同的含義,大部分電文與航行信息的傳達有關,也有部分電文用于專門應用或系統管理功能。
AIS分為實體AIS和虛擬AIS兩種。安裝有真實AIS終端,發送通過傳感器所采集的真實信息,周邊船舶AIS終端可接收到該信息,信息和實體一致,即為實體AIS,而沒有真實的AIS終端,而由AIS基站根據特定的程序和協議,發射在其覆蓋范圍內,由人員和系統自行虛擬的AIS信息,周邊船舶AIS終端可接收到該信息,即為虛擬AIS。目前虛擬AIS已在航標、漁場、水文站、風電場等領域得到廣泛的應用。例如虛擬AIS航標,在設置真實航標不可能或不可行的情況下,通過AIS基站發射21號電文,設置實際航標并不存在的虛擬AIS航標對危險物、障礙物、關鍵點進行標繪,確保過往船舶AIS船載終端可見,從而保證通航安全。
3 洋山港小目標系統建設
東海航海保障中心的小目標系統,正是針對洋山港交通流量最大,環境流向復雜的警戒區及其主航道、金山航道和東支航道向外延伸水域,整合了固態雷達和虛擬AIS技術,從而實現該水域小目標的掃測跟蹤顯示,如圖4所示。
設備選型選用了丹麥的TERMA SCANTER 2202固態雷達(見圖5),是基于固態發射機技術的X波段二維全相干脈沖壓縮雷達,具備長使用時長和高可用性,內置嵌入式跟蹤器ET2,即使在惡劣天氣條件下,也能對敏捷和小目標進行精準檢測和跟蹤,見表1。
固態雷達的安裝位置關系著雷達作用功效,在經實地勘察和反復分析后,最終選定于小洋山沈家灣碼頭建筑頂部進行固態雷達安裝。該位置位于洋山港主內航道前端,視野開闊,距離設定覆蓋面最長距離16 km左右,最短距離1 km左右,扇面210°,具有穩定的電力資源,以及人員值守,建筑頂部地面平坦寬闊,適合固態雷達的安裝應用,見圖6。
根據雷達的工作原理,雷達最大探測距離取決于雷達天線架設高度和目標高出水面高度,近距離盲區取決于雷達垂直波束寬度和天線架設高度,最大作用距離取決于天線發射脈沖功率、天線增益、工作波長、接收機功率和目標雷達截面積。經測算,沈家灣固態雷達各性能指標均符合設計要求,見圖7。
TERMA SCANTER 2202固態雷達內置嵌入式跟蹤器ET2采用最先進的跟蹤算法,可自動識別雷達圖像中的目標回波,并將每個回波目標的運動標注為具有相關軌道參數的確認軌道,見圖8。
當回波強度超過設定的視頻閾值,則ET2就開始生成和更新跟蹤信息。ET2給識別目標分配唯一ID號,并確定位置、速度和運動狀態等相關特征,并根據其運動狀態,預期其運動趨勢,例如勻速運動、加速轉彎等,從而跟蹤每個目標的軌跡,并將這些信息提供給雷達圖像呈現。
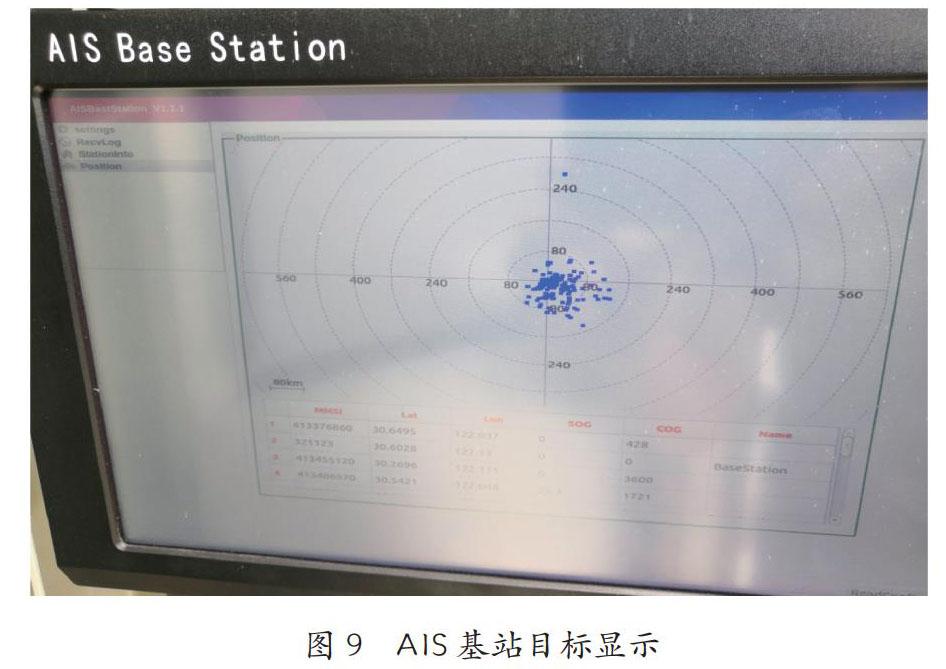
后端配套的AIS基站選用的是國產標準AIS基站,同樣部署于沈家灣碼頭建筑頂部,通過拉距測試,證實該AIS基站可與周邊30 km的AIS船臺進行正常信息交互,完全滿足系統信號覆蓋距離要求,見圖9。
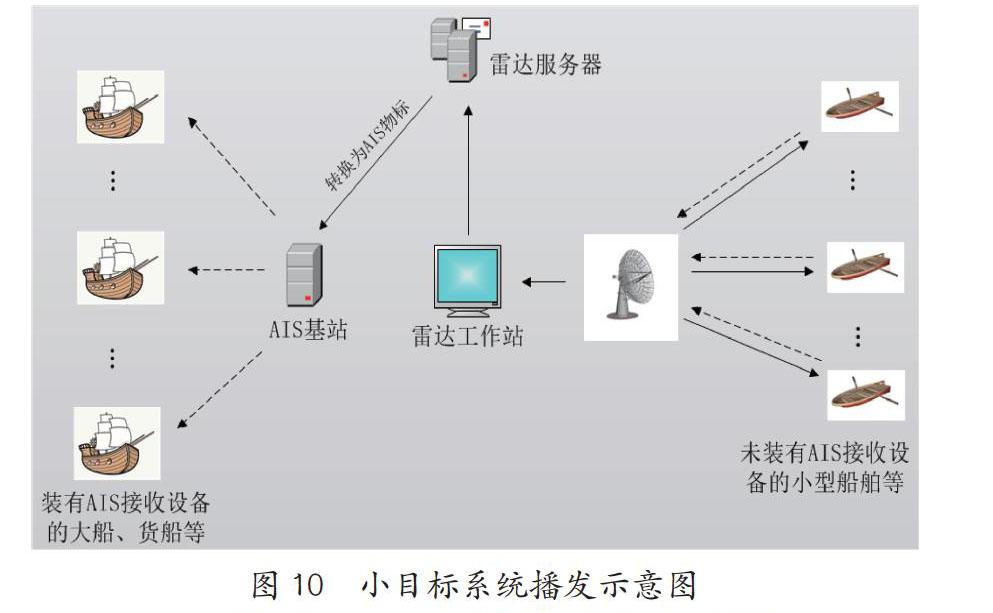
雷達服務器將信息進行篩選和提取,排除雜波、航標等已知信息目標,形成未知小目標列表矢量化入庫,與AIS基站實時接收的AIS數據進行融合比對。該位置雷達跟蹤目標同時匹配到AIS信息,則自行丟棄該目標;如無法匹配同位置的AIS信息,則AIS服務器將雷達矢量數據,封裝成標準的AIS電文,并通過AIS基站預定程序對外播發虛擬B類船舶AIS信息,至AIS基站覆蓋范圍內所有安裝有AIS終端的船舶,確保AIS船舶可以“看見”周邊水域未裝AIS終端的船舶,以便識別避讓,如圖10所示。
虛擬B類船舶AIS信息采用載波偵聽方式進行播發,以18號電文播發位置報告。為了與真實船舶AIS信息相區別,系統設定以100開頭的6位數字代碼代表MMSI九位碼,時戳采用岸上時間同步器提供時間,播發頻率默認30 s,可根據需求自行調配。除了經緯度位置信息外,AIS電文還提供船首向、航速、航向等相關信息。同時利用VHF天線高度、增益、播發功率控制AIS基站的播發范圍,確保范圍默認略大于固態雷達監控范圍,以便于大中型船舶在進出警戒水域前提前獲取AIS基站播發的小目標模擬AIS信息,從而提高警覺避免碰撞,如圖11、圖12所示。
4 系統效能測定
洋山港小目標系統完成建設后,為驗證系統效能,對雷達的檢測能力和分辨能力進行測定。
4.1 雷達檢測能力
測試工具:木質小船,10 m2反射器
測試方法:將雷達脈沖長度調為長脈沖,雷達狀態與控制“捕捉范圍”設為10 n mile;測試船舶沿著雷達站徑向由遠而近或由近而遠,在雷達10 n mile左右開展測量。在雷達服務工具軟件RST上觀察木質小船上反射器的回波,每次連續觀測10個天線掃描,并重復進行3次。當目標發現概率為90%(即在10次天線掃描中能有9次左右出現在顯示器上),在RST上測得目標距離R即為雷達的檢測能力。
測試結果:
4.2 雷達分辨能力
測試工具:木質小船,10 m2反射器
測試方法:將雷達脈沖長度調為短脈沖,調節增益使木船的發現概率不低于90%(即在10次天線掃描中能有9次左右出現在顯示器上)。探測結果見表2。
A.距離分辨力:
在規定的顯示量程上,使兩目標處于雷達同一方位上。彼此間距大于50 m之處。逐漸縮短兩目標之間距離間隔,在RST上觀察到兩目標回波相切時,用測量繩測出兩目標之間的距離;重復以上動作,測試5次左右,以平均值作為目標的距離分辨力。
測試結果見表3。
B.方位分辨力:
在規定的顯示量程上,使兩目標到雷達的距離相等,逐漸縮短兩目標之間角度間隔,在RST上觀察到兩目標回波相切時,用測量繩測出兩目標之間的距離,同時在RST上測出目標到雷達的徑向距離;重復以上動作,測試5次左右,以平均值按目標距離換算成平均最小角度間隔作為雷達的方位分辨力。測試結果見表4。
根據測定,得出結論:Scanter2202固態雷達系統在有效覆蓋范圍內,能對10 m2探測球進行準確探測,雷達探測距離≥9.8 nm,距離分辨力≤20 m,方位分辨力≤0.5°(3 n mile量程),符合系統設計要求。
洋山港小目標系統完成建設后,系統運行穩定可靠,一定程度上解決了洋山港警戒區及其主航道、金山航道和東支航道向外延伸水域,在能見度不良情況下,船舶可見的最后盲點,為保障洋山港水域船舶航行安全,維護船舶通航秩序,降低船舶碰撞風險起到較好的輔助作用。
作者簡介:
毛新健,(E-mail)13917321060@139.com,021-6846286
任子俊,(E-mail) ren.zijun@coscoshipping.com,021-65968292
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中華手工(2017年2期)2017-06-06 23:00:31
中國船檢(2017年3期)2017-05-18 11:33:09
中外會展(2014年4期)2014-11-27 07:46:46
航海(2005年4期)2005-04-29 00:00:00
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32