基于魯棒擾動觀測器的交流電力彈簧反饋線性化解耦控制
2021-08-23 02:37:18欽佳南王育飛張曉雯
電力系統自動化 2021年16期
薛 花,欽佳南,王育飛,張曉雯,李 豪
(上海電力大學電氣工程學院,上海市 200090)
0 引言
隨著綠色電力推廣應用,風能、太陽能等可再生能源大規模接入交流微電網,而高滲透率可再生能源發電的波動性與隨機性會帶來交流微電網母線電壓波動、有功功率諧波等電能質量問題[1-2]。作為一種新的需求側管理技術,交流電力彈簧(AC electric spring,ACES)將機械彈簧概念對偶應用于電力系統,通過合理控制儲能變流器,將一部分可再生能源發電引起的母線電壓波動轉移至非關鍵負載,僅需較小的儲能容量,即可實現關鍵負載電壓平穩控制,有效提升電能質量[3-5]。
ACES通常由儲能電池、H橋雙向變換器和LC濾波電路組成,不僅能夠實現母線電壓平穩控制,同時具備有功功率平滑、無功功率補償等多種功能[6-9]。而ACES是典型的強耦合、非線性對象,通常采用功率解耦方法實現有功功率與無功功率的獨立控制,提升控制性能[10-12]。文獻[13]提出δ方法,利用ACES輸出電壓相位與幅值解耦控制,實現交流微電網有功平滑與無功補償。文獻[14]提出ACES弦向與徑向分解方法,平穩關鍵負載電壓。這2種方法計算量都較大,為了進一步簡化控制器設計,文獻[15]結合矢量控制,提出dq坐標系下的ACES有功、無功功率解耦控制方法。文獻[16]提出ACES內外環dq解耦電流控制方法,但電流環內部依然存在部分耦合。文獻[17]提出ACES前饋解耦控制算法,在傳統dq解耦電流控制中引入濾波電容電壓內環,實現ACES電流環解耦與有功、無功功率的精確控制,有效拓寬了基于dq解耦控制的ACES工程應用范圍。采用dq解耦的現有研究成果主要基于矢量解耦控制(vector decoupling control,VDC)思想設計控制器,未能從ACES非線性本質出發,應用非線性控制理論解決耦合控制問題,實現ACES的完全解耦和精確線性化[18-19]。
因此,本文針對ACES的強耦合特性,構建兩輸入/兩輸出李導數仿射模型,將ACES等效為完全解耦的dq兩相電流積分器;針對ACES的非線性特性,設計狀態變換矩陣,將ACES等效為完全線性化模型。此外,設計了形式簡單的魯棒擾動觀測器,消除參數攝動對精確反饋線性化控制性能的不利影響。基于MATLAB/Simulink的仿真結果和基于dSPACE的實驗結果表明所提方法具有響應快速、穩定域寬、魯棒性強的特點。
1 ACES兩輸入/兩輸出李導數仿射模型
1.1 ACES數學模型
含ACES的交流微電網拓撲結構如圖1所示。
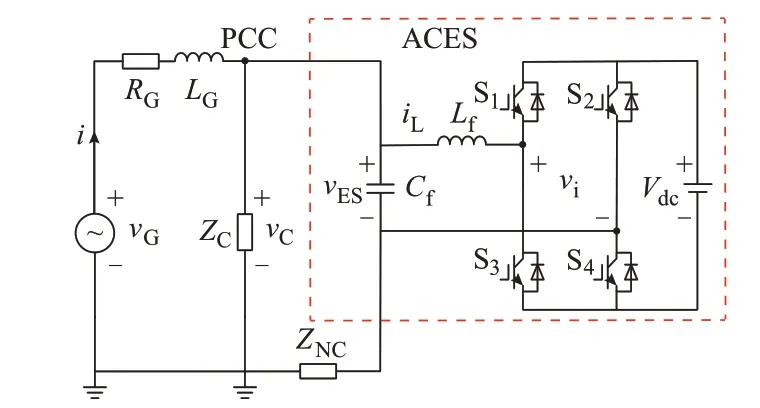
圖1 含ACES的交流微電網拓撲結構Fig.1 Topology of AC microgrid with ACES
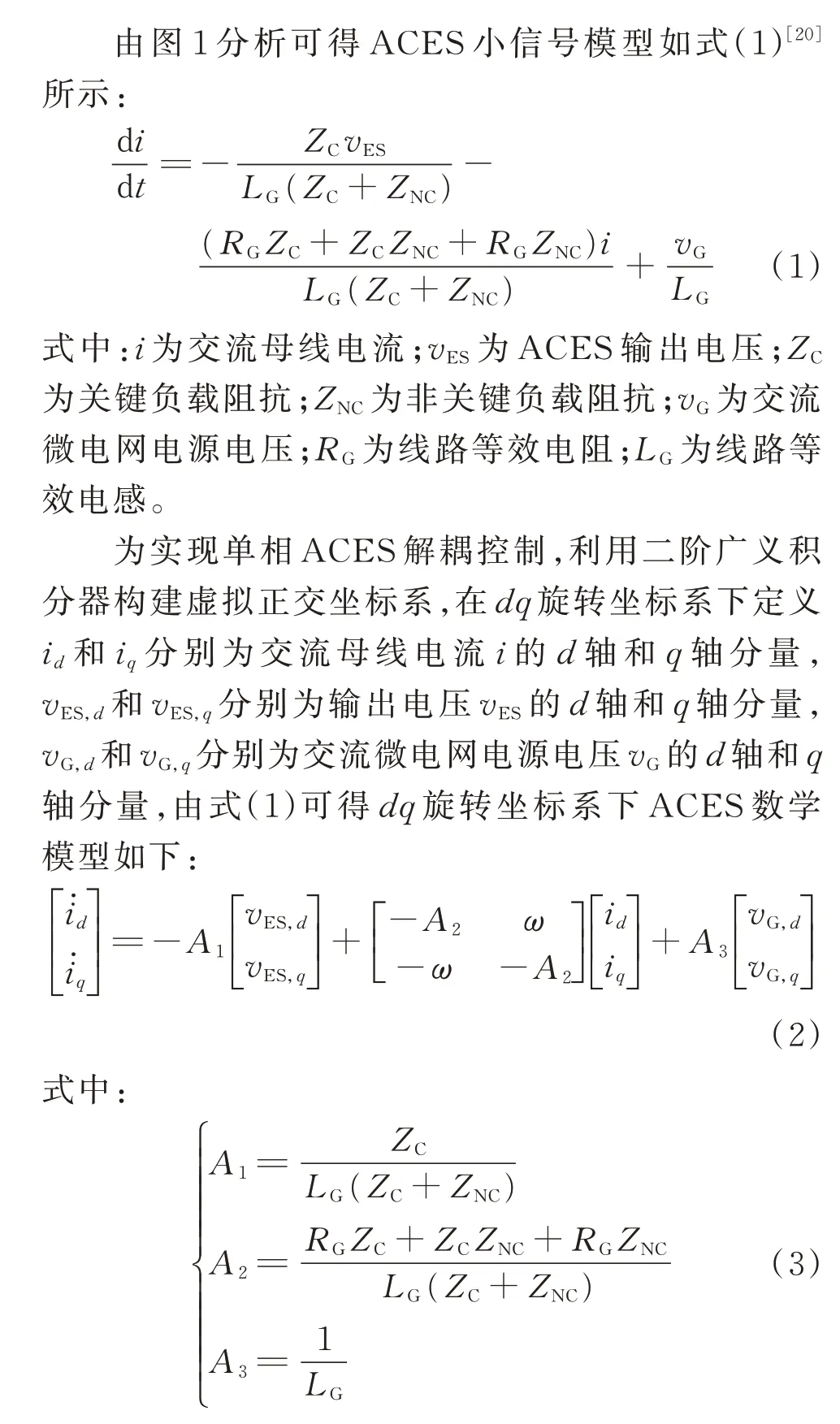
分析式(2)所示dq旋轉坐標系下的ACES數學模型可知,id和iq電流之間依然存在交叉耦合,基于dq旋轉坐標系下的VDC方法未能實現ACES完全解耦,耦合的電流分量id和iq會影響解耦控制性能,增加控制器設計的復雜度。因此,實現id和iq完全解 高ACES控制性能和工程實用性的關鍵步驟。
1.2 李導數仿射模型和反饋線性化條件證明
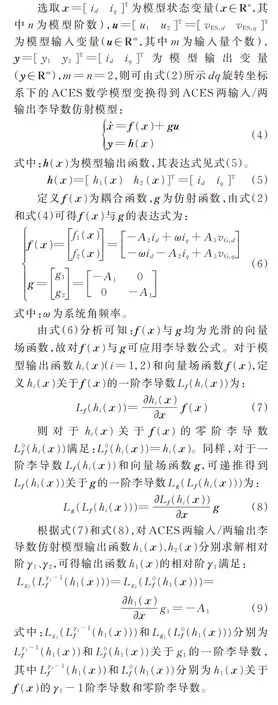
分析式(9)和式(10)可知,γ1=1、γ2=1,γ1+γ2=2=n。ACES兩輸入/兩輸出李導數仿射模型滿足模型相對階之和等于模型階數。根據微分幾何理論[21],式(4)所示的ACES兩輸入/兩輸出李導數仿射模型滿足應用精確反饋線性化方法的充分必要條件。
2 ACES解耦控制方法
2.1 ACES全解耦設計
分析式(4)和式(14)可知,當解耦矩陣E和ACES兩輸入/兩輸出李導數仿射模型聯合觀測時,ACES可等效為相互獨立的dq兩相電流積分器,實現電流分量id和iq的完全解耦控制。ACES解耦控制結構如圖2(a)所示。
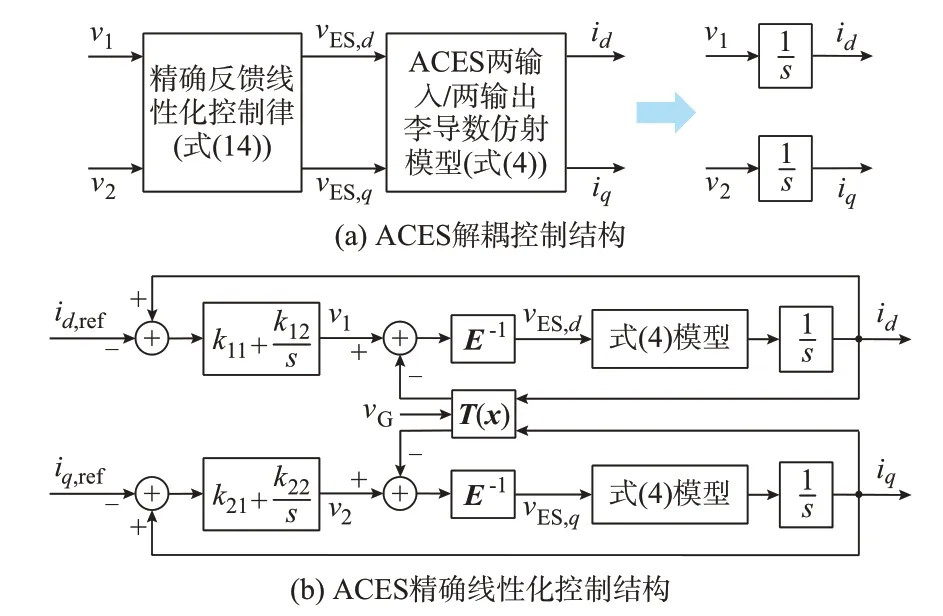
圖2 ACES精確反饋線性化解耦控制結構Fig.2 Structure of exact feedback linearization decoupling control for ACES
2.2 ACES完全線性化設計
針對ACES的非線性特性,分析式(14)所示精確反饋線性化控制律可知,ACES的輸出變量滿足:

即精確反饋線性化控制輸入變量v與ACES輸出變量之間滿足積分關系,通過合理設置狀態變換矩陣T(x),可實現當式(14)所示精確反饋線性化控制律與ACES兩輸入/兩輸出李導數仿射模型聯合觀測時,系統等效為完全線性化對象。
因此,反饋線性化控制輸入變量v可設計為簡單的線性控制器:
式 中:y1,ref=id,ref和y2,ref=iq,ref分別為ACES輸出變量id和iq的 參 考 值;k11、k21、k12、k22為 控 制 器 參 數;e1=y1,ref-y1和e2=y2,ref-y2為 期 望 電 流 軌 跡 跟蹤誤差,滿足式(18)。
根據有界跟蹤原理,式(17)可實現期望電流軌跡跟蹤誤差e1和e2指數收斂和控制閉環系統全局漸近穩定[22]。
分析式(4)和式(14)可知,ACES的實際控制量,即式(14)可寫為:

ACES精確反饋線性化控制結構如圖2(b)所示。精確反饋線性化控制方法可實現ACES完全解耦和完全線性化,對于全解耦和線性化的ACES系統,采用簡單線性控制方法即可實現期望軌跡跟蹤與系統全局漸進穩定。
2.3 線性功率控制器設計
分析圖1可知,注入公共連接點(PCC)處的視在功率S、有功功率Pin、無功功率Qin分別表示為:

式 中:vC為 關鍵負 載電壓,即PCC處的電壓;VC為電壓vC的向量形式;I*為交流母線電流i的共軛向量 形式;vC,d和vC,q分別為 電壓vC的d軸和q軸分 量。
設置vC電壓矢量與其在dq旋轉坐標系下d軸電壓分量一致,即q軸電壓分量vC,q=0,則式(20)中有功功率Pin、無功功率Qin變為:
分析式(21)可知,注入PCC處的有功功率Pin和無功功率Qin分別與交流母線電流分量id和iq成正比,設計簡單的比例-積分(PI)控制器即可實現ACES有功功率、無功功率漸進跟蹤功率參考值Pin,ref和Qin,ref。
將精確反饋線性化控制所需的電流d、q軸分量參 考 軌 跡id,ref和iq,ref定 義 為PI控 制 器 輸 出,則 線 性功率控制器可設計為:

式中:kP和kI分別為功率PI控制器的比例系數和積分系數。
2.4 魯棒擾動觀測器設計
分析式(4)所示ACES兩輸入/兩輸出李導數仿射模型可知,當系統存在不確定性參數攝動時,模型未建模參數偏差會影響ACES精確反饋線性化控制性能[23-24]。假設ACES兩輸入/兩輸出李導數仿射模型的模型參數偏差為Δf和Δg,且模型參數偏差滿足范數有界條件,則不確定性擾動情況下的ACES擾動李導數仿射模型為:

式中:
在確保ACES內部動態穩定的前提下,針對ACES擾動李導數仿射模型式(23),設計形式簡單的魯棒擾動觀測 器,求解模型狀態觀測值iˉd和iˉq,獲得由模型參數偏差引起的觀測誤差Δi,即ACES擾動李導數仿射模型的等效狀態量誤差Δid和Δiq,將Δid和Δiq分別補償至精確反饋線性化控制律狀態轉換矩陣T(x)中的狀態量id和iq,即可消除由模型參數偏差Δf和Δg引起的精確反饋線性化方法控制性能影響。
設式(23)所示ACES擾動李導數仿射模型存在狀態反饋控制器:
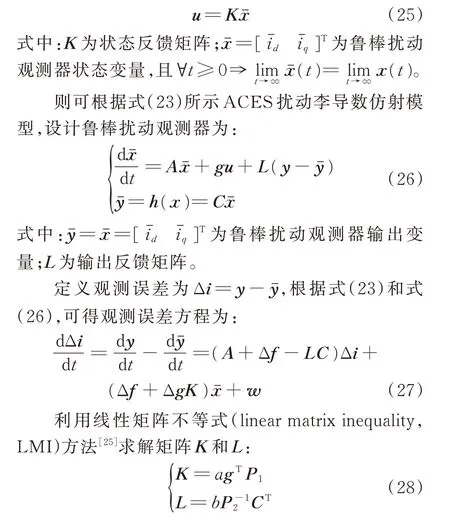
式中:P1和P2為對稱正定矩陣;a和b為正實數。
將求解得到的矩陣K和L代入式(25)和式(26),可得到形式簡單的魯棒擾動觀測器。
綜上所述,基于魯棒擾動觀測器的ACES反饋線性化解耦控制系統結構如圖3所示。外環為ACES線性功率控制,實現功率期望軌跡跟蹤,同時求取電流參考軌跡id,ref和iq,ref;內環為精確反饋線性化控制,通過設計解耦矩陣E和狀態變換矩陣T(x),實現ACES完全解耦和完全線性化轉換,設計簡單的線性控制器即可實現電流參考軌跡快速跟蹤和全局漸進穩定;設計魯棒擾動觀測器,求解不確定性參數攝動影響下的等效狀態量誤差Δid和Δiq,通過前饋補償,抵消不確定性擾動對閉環控制系統的影響,增強系統穩定性與魯棒性,且魯棒擾動觀測器的設計依然保持解耦特性。整個閉環控制系統結構簡單,計算量小,易于工程應用與拓展。
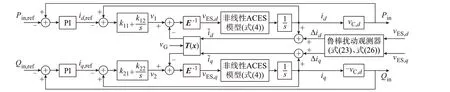
圖3 基于魯棒擾動觀測器的ACES反饋線性化解耦控制結構Fig.3 Structure of feedback linearization decoupling control for ACES based on robust disturbance observer
本文所提基于魯棒擾動觀測器的反饋線性化解耦控制(feedback linearization decoupling control based on robust disturbance observer,FLDC-RDO)閉環系統穩定性分析如附錄A所示。
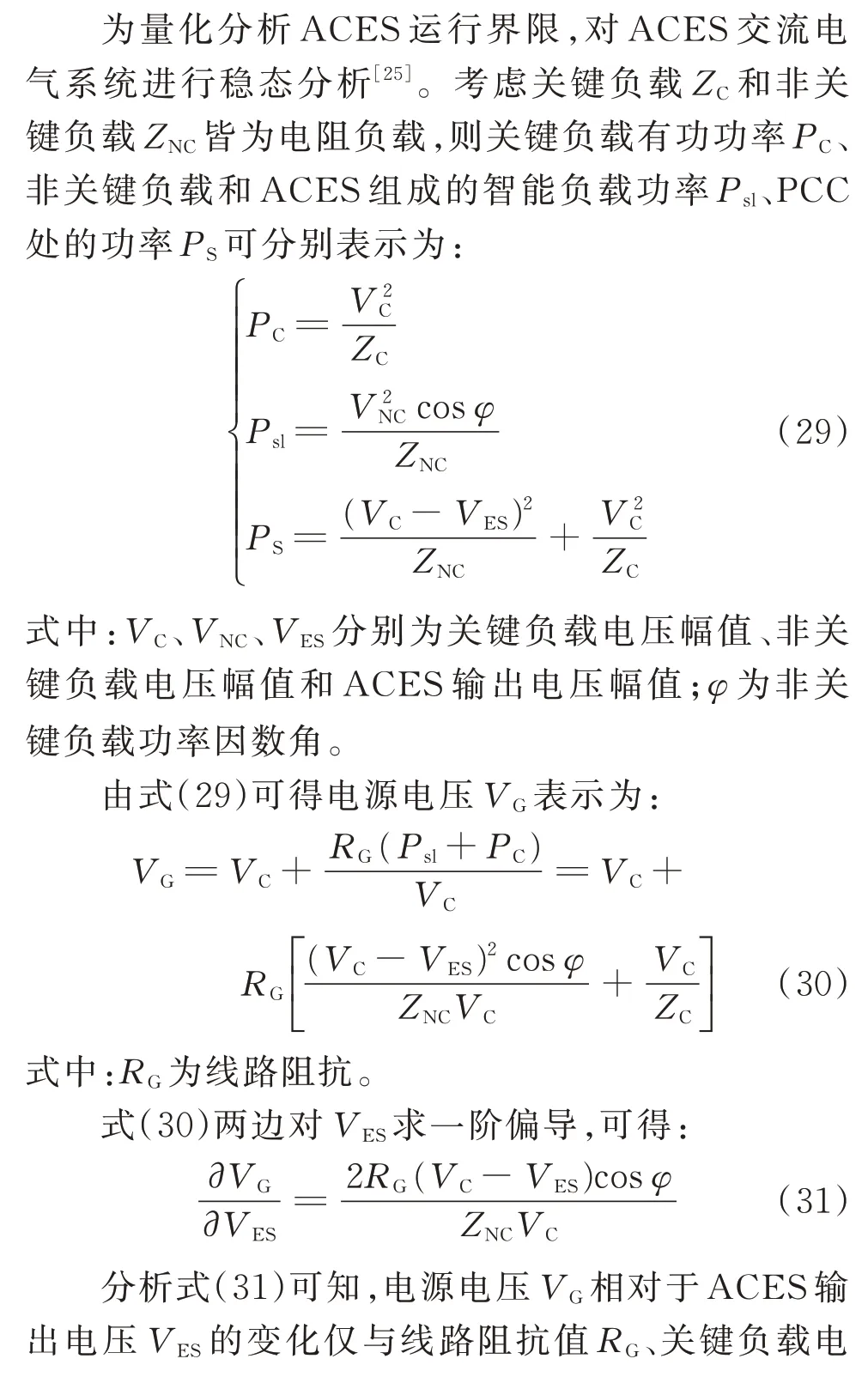
3 ACES運行界限分析

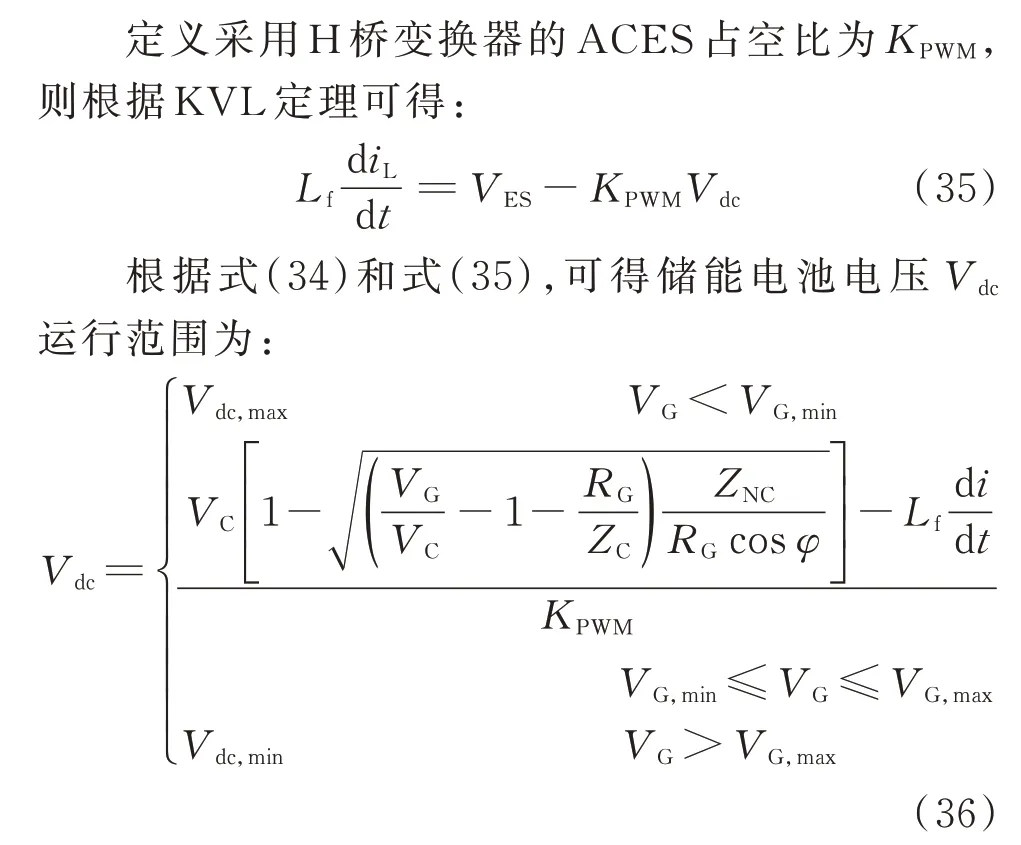
式 中:Vdc,min和Vdc,max分 別 為 儲 能 電 池 電 壓 最 小 值 和最大值。
由式(34)和式(36)分析可知,ACES運行界限與儲能電池容量、非關鍵負載與關鍵負載阻抗比相關。當電源電壓VG波動增大,若超出ACES運行界限,可通過增大儲能電池容量或調整非關鍵負載與關鍵負載阻抗比,實現ACES運行界限擴大。
4 仿真結果分析
為驗證所提FLDC-RDO方法的可行性和有效性,在MATLAB/Simulink環境下搭建含ACES的交流微電網模型,如圖1所示,系統參數如附錄B表B1所示。設置交流微電網電源電壓vG由穩定的交流電源和風力發電、光伏發電等可再生電源組成,可模擬高滲透可再生能源發電引起的交流母線電壓波動、有功功率波動;設置關鍵負載電壓參考值VC,ref=155 V;設 置 功 率 外 環 有 功 功 率 參 考 值Pin,ref=60 W,無 功 功 率 參 考 值Qin,ref=0 var。VDC方法與所提FLDC-RDO方法控制器參數如附錄B表B2所示,PI參數已優化設計[26]。
4.1 抑制交流微電網母線電壓波動性能測試
設置交流電源電壓vG每隔0.25 s發生一次突變,即t=0.25 s時 電 源 電 壓VG由155 V突 升 至162 V,t=0.5 s時 電 源 電 壓VG由162 V突 降 至147 V,如圖4(a)所示。交流微電網未安裝ACES時,ACES輸出電壓、關鍵負載電壓、非關鍵負載電壓波形如圖4(b)至(d)所示。分析圖4(b)至(d)可知,ACES未啟動時,輸出電壓為零;關鍵負載和非關鍵負載并聯運行,兩者電壓均隨著電源電壓VG波動,關鍵負載電壓無法穩定維持在期望電壓155 V。
當交流微電網安裝ACES后,ACES輸出電壓、關鍵負載電壓、非關鍵負載電壓波形如圖4(e)至(g)所示。由圖4(b)至(d)和圖4(e)至(g)對比可知,安裝ACES后,應用 所提FLDC-RDO方法,在t=0~0.25 s階段,電源電壓VG=155 V,即為關鍵負載期望電壓,但由于存在線路阻抗,交流母線電壓低于關鍵負載期望電壓,ACES工作在升壓模式,使關鍵負載電壓維持在期望電壓。在t=0.25 s時,電源電壓vG由155 V突升至162 V,交流母線電壓高于關鍵負載期望電壓,ACES自動切換至降壓模式,減小ACES輸出電壓,使非關鍵負載電壓上升,將電源電壓vG波動盡可能轉移至非關鍵負載。在t=0.5 s時,電源電壓vG由162 V突降至147 V,交流母線電壓再次低于關鍵負載期望電壓,ACES工作狀態由降壓模式轉換為升壓模式,抬升ACES輸出電壓,減小非關鍵負載電壓,實現關鍵負載電壓維持在期望電壓。
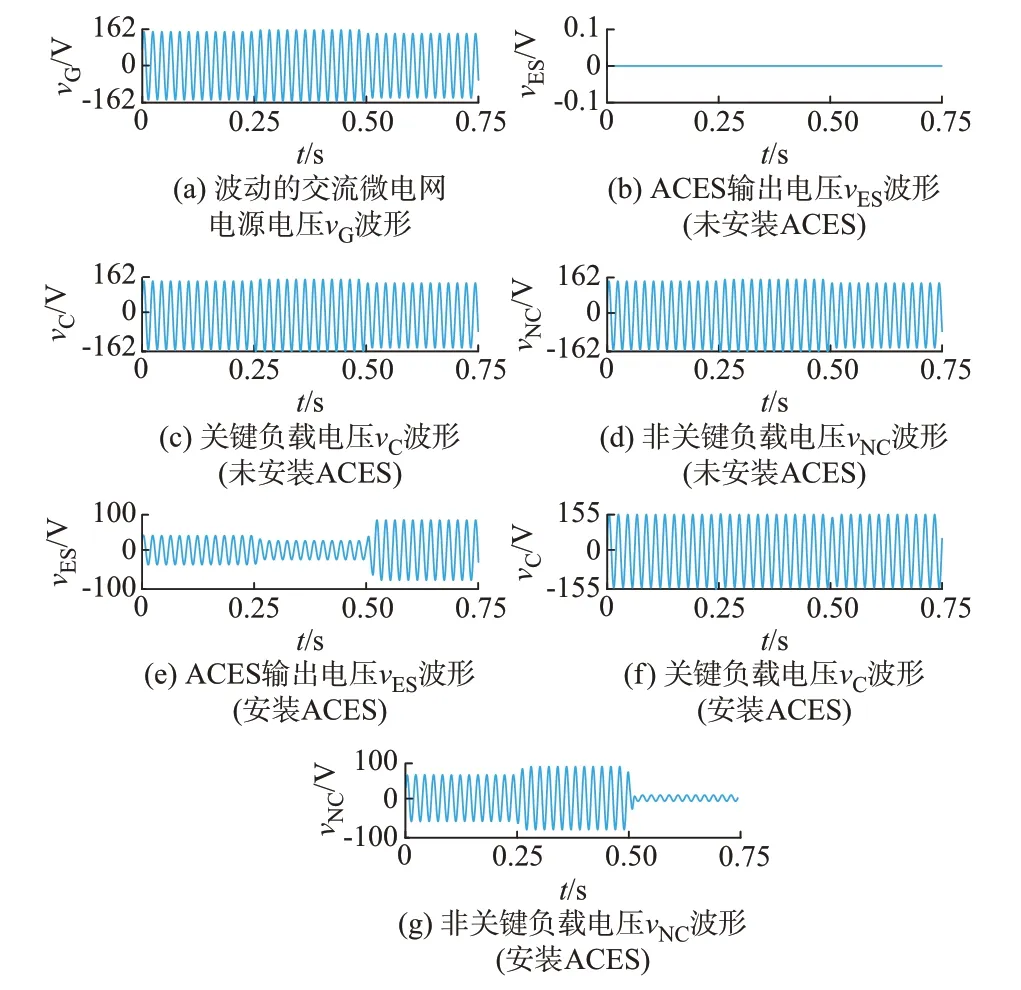
圖4 交流微電網仿真波形Fig.4 Simulation waveforms of AC microgrid
分析圖4(e)至(g)可知,應用所提FLDC-RDO方法,可實現ACES跟隨交流母線電壓波動動態調節工作模式,使關鍵負載電壓能夠維持在期望電壓155 V,同時將源側電壓波動轉移至非關鍵負載,減小對ACES儲能電池容量的需求,提升系統經濟性。
考慮交流微電網母線電壓發生波動的同時,設置t=0.25 s時,id期 望 值 從0.75 A階 躍 變 化 到1.5 A;t=0.5 s時,iq期望值從0 A階躍變化到1 A。2種情形下,交流母線電流dq軸和αβ軸分量響應波形分別如圖5(a)和(b)所示。
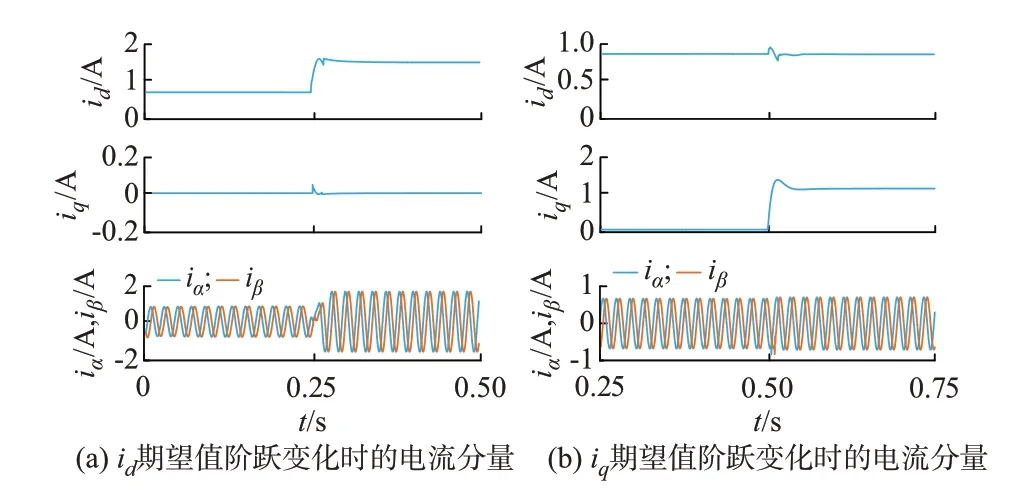
圖5 解耦控制性能測試仿真波形Fig.5 Simulation waveforms of decoupling control performance testing
分析圖5可知:當交流母線電壓與id、iq期望值同時發生波動,由于所提FLDC-RDO方法實現了ACES完全解耦控制,id、iq經小幅暫態波動后都能快速跟蹤期望軌跡,穩態無靜差,驗證了解耦控制的快速性和準確性;通過二階廣義積分器構建的虛擬正交電流分量iα、iβ之間依然保持良好的正交性,動態響應迅速,驗證了所提解耦方法能夠實現交流母線電流幅值與相角的精確控制。
4.2 交流微電網功率跟蹤性能測試
設置交流微電網電源輸出有功功率PG每隔0.25 s發生一次突變,即t=0.25 s時源側有功功率PG由60.4 W突 升 至66.6 W,t=0.5 s時源側有 功 功率PG由66.6 W突降至53.9 W,源側無功功率QG=0 var保 持 不 變,如 圖6(a)所 示。將 所 提FLDCRDO方法與VDC方法的ACES控制性能進行對比。
ACES輸出有功功率PES、無功功率QES波形如圖6(b)所示。分析圖6(b)可知:在t=0.25 s時,源側有功功率PG由60.4 W突升至66.6 W,ACES維持輸出有功功率不變,使得輸出無功功率QES由4 var突升至8.6 var,將源側有功功率波動轉移至非關鍵負載,ACES工作在電感模式;在t=0.5 s時,源側有功功率PG由66.6 W突降至53.9 W,ACES依然維持輸出有功功率不變,使得輸出無功功率QES由8.6 var突 降至-11.4 var,ACES工作在 電容模式。VDC方法對于源側功率變化的感知更為靈敏,啟動快速,但FLDC-RDO方法由于實現了交流母線電流的完全解耦控制,能夠快速調整ACES功率輸出,響應功率參考值變化,因此功率動態響應調節時間更短。
交流母線電流分量id、iq波形如圖6(c)所示。分析圖6(c)可知,應用所提FLDC-RDO方法,交流母線電流分量id、iq之間由于消除了耦合特性,具有更高自由度,id響應快速,iq基本無波動,實現了電流內環id、iq完全解耦控制,動態控制性能相較于電流內環依然存在部分耦合的VDC方法具有顯著提升。
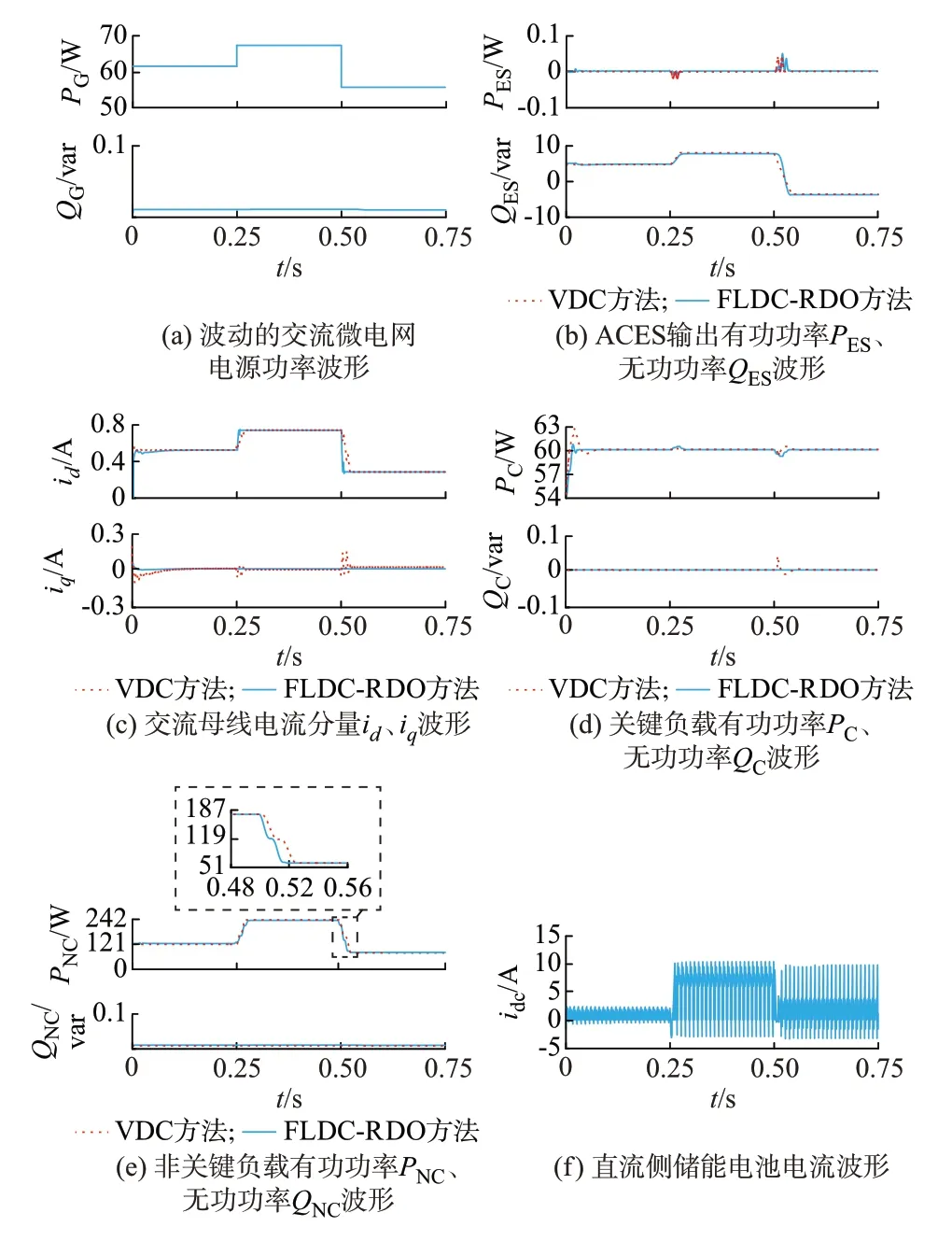
圖6 功率跟蹤控制仿真波形Fig.6 Simulation waveforms of power tracking control
關鍵負載有功功率PC、無功功率QC波形如圖6(d)所 示。分 析 圖6(d)可 知,應 用 所 提FLDCRDO方法,由于交流母線電流實現完全解耦,因而外環功率控制也完全解耦,源側有功功率波動時關鍵負載有功功率、無功功率經短暫暫態調整,快速恢復平穩運行,較VDC方法,所提FLDC-RDO方法具有較優的源側功率波動抑制性能和準確性更高的外環功率解耦控制性能。
非關鍵負載有功功率PNC、無功功率QNC波形如圖6(e)所示。分析圖6(e)可知,在t=0.25 s時,源側有功功率PG由60.4 W突升至66.6 W,非關鍵負載有功功率PNC由121 W升至185.2 W,承受了源側有功功率波動,維持關鍵負載有功功率平穩。在t=0.5 s時,源側有功功率PG由66.6 W突降至53.9 W,非關鍵負載有功功率PNC由185.2 W降至54 W,轉移源側有功功率波動,確保關鍵負載有功功率維持在期望值60 W,所提FLDC-RDO方法能夠有效抑制源側有功功率波動,同時維持無功功率平穩,說明應用功率解耦控制有利于關鍵負載平穩運行。
直流側儲能電池電流波形如圖6(f)所示。分析圖6(f)可知,在t=0.25 s時,由于源側有功功率PG由額定值60.4 W突升至66.6 W,為跟蹤源側有功功率期望值,儲能電池工作在充電模式,儲能電池電流從2.3 A增加到9.8 A;在t=0.5 s時,源側有功功率PG由66.6 W突降至53.9 W,儲能電池工作狀態快速轉換為放電模式,儲能電池電流由9.8 A降至4.7 A。直流側儲能電池能夠根據源側有功功率變化自動調整充放電狀態,實現有功功率期望軌跡快速跟蹤。
采用VDC方法和FLDC-RDO方法的關鍵負載有功功率PC、無功功率QC跟蹤性能指標對比如表1所示,其中,在t=0.50~0.75 s,由于在VDC方法下的無功功率QC穩態值為0 var,故該處的無功功率QC超調量用數值表示。由表1可知,在t=0、0.25、0.50 s時刻,由 于FLDC-RDO方 法 實 現 了ACES完全解耦和精確線性化,較VDC方法,有功功率和無功功率之間耦合影響更小,能夠快速實現功率無靜態誤差跟蹤,具有更小的上升時間、超調量和調節時間,有效提升功率解耦控制性能。
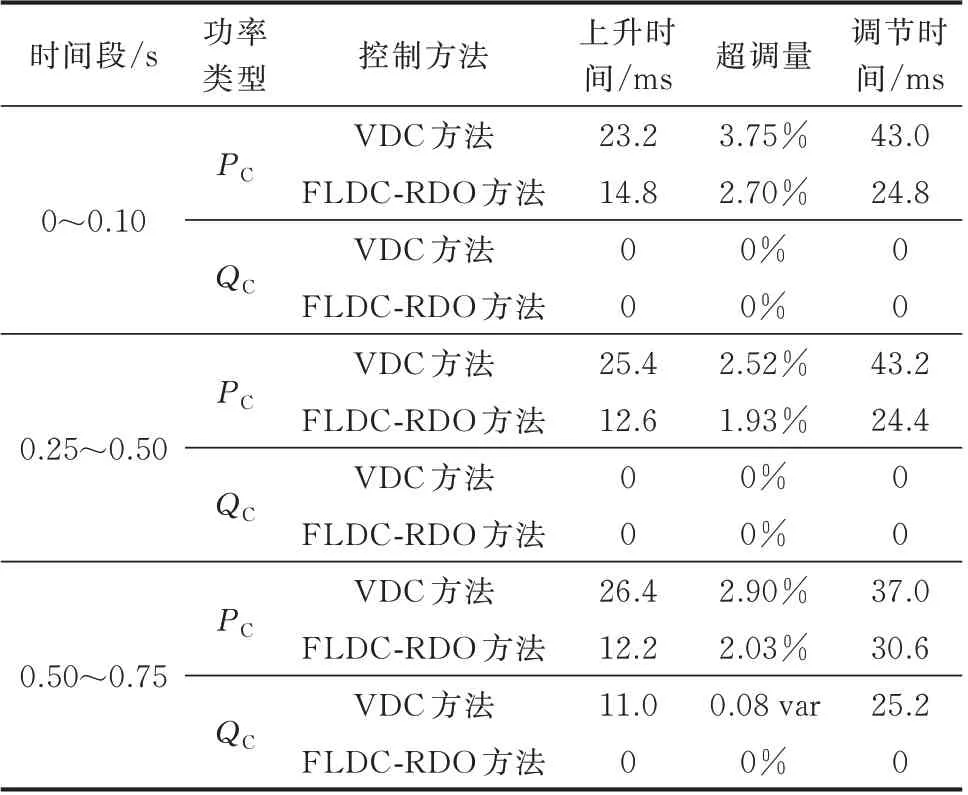
表1 關鍵負載有功功率、無功功率跟蹤性能指標對比Table 1 Comparison of tracking performance indices of active power and reactive power of critical load
電網線路參數變化、負載突變、ACES參數攝動情形下所提方法仿真測試結果如附錄B第B1章至第B3章所示。
5 基于dSPACE的實驗結果分析
借助dSPACE系統的快速原型功能,建立如附錄C圖C1所示的基于dSPACE的含ACES交流微電網實驗系統,驗證所提FLDC-RDO方法的正確性與可行性。附錄C圖C1中,ACES單相H橋變換器開關管選擇型號為IPB407N30N的MOSFET模塊,驅動電路選擇SKHI21A模塊。所提控制方法在MATLAB/Simulink環境下建模實現,通過dSPACE系統完成向TMS320F28335高速處理器的下載,生成H橋變換器開關的脈寬調制(PWM)觸發信號,實現ACES實時控制。實驗系統參數如附錄C表C1所示。
1)交流微電網功率跟蹤性能測試
設置交流微電網源側有功功率PG期望值初始為80 W,在t=2 s時,突降至60 W;在t=4 s時,突增至100 W;源側無功功率QG期望值保持不變;源側有功功率PG期望值、無功功率QG期望值波形如圖7(a)所示。應用所提FLDC-RDO方法的實驗結果如圖7(b)至(e)所示。
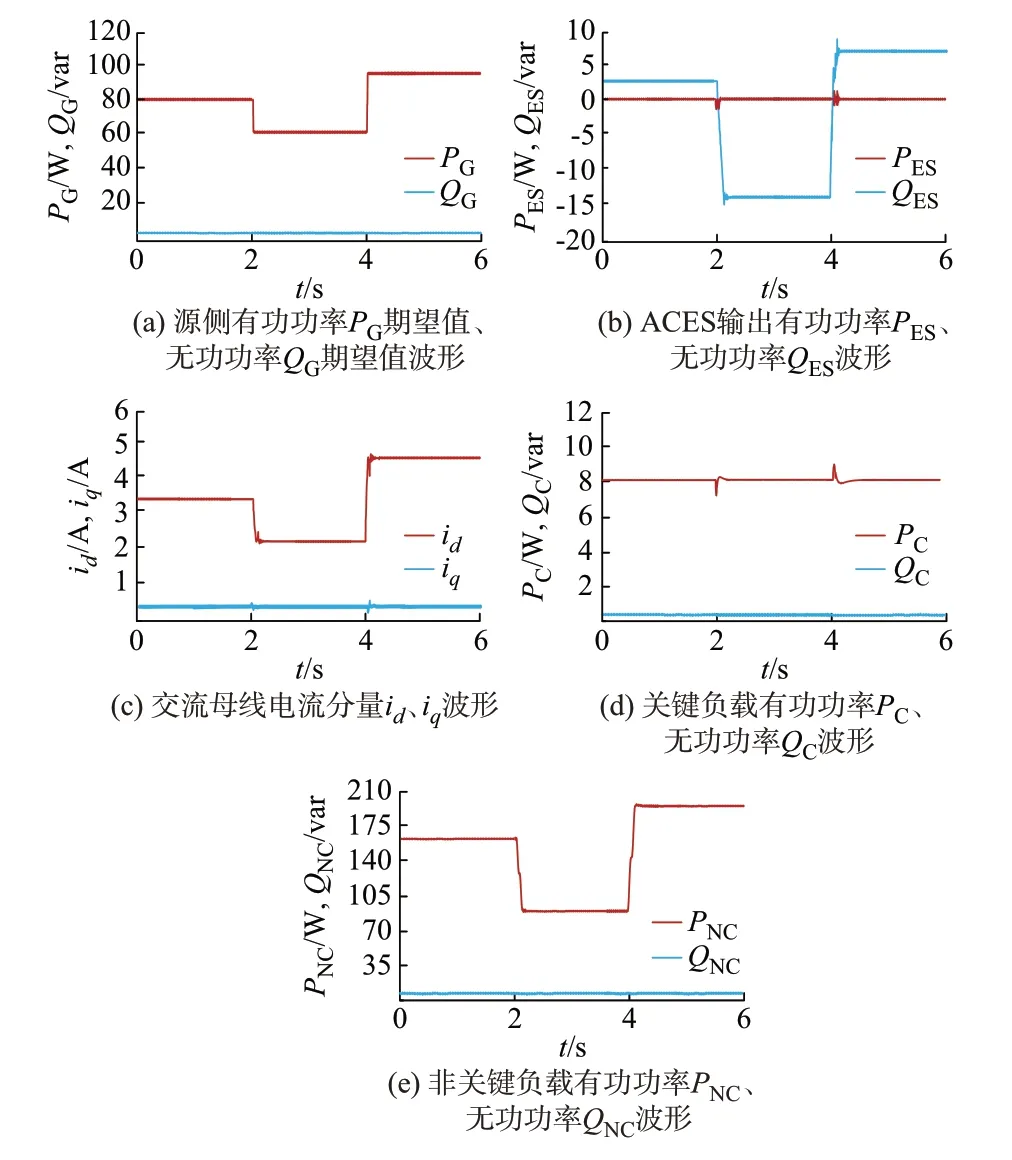
圖7 交流微電網功率跟蹤性能測試實驗波形Fig.7 Experimental waveforms of AC microgrid power tracking performance testing
ACES輸出有功功率PES、無功功率QES波形如圖7(b)所示。分析圖7(b)可知,在t=2 s時,當PG參考值由80 W突降至60 W,ACES快速切換至電容 工 作模式,在t=4 s時,當PG參考值 由60 W突 增至100 W,ACES快速跟隨響應,切換至電感工作模式,ACES輸出無功功率經小幅暫態調整,快速恢復平穩,實現了ACES高性能功率解耦控制。
交流母線電流分量id、iq波形如圖7(c)所示。分析圖7(c)可知:id快速跟隨源側有功功率變化,iq暫態過程短暫,始終保持平穩,無穩態跟蹤誤差,由于所提FLDC-RDO方法實現了id、iq完全解耦控制,使交流母線電流具有較好的動、靜態響應性能。
關鍵負載有功功率PC、無功功率QC波形如圖7(d)所示,非關鍵負載有功功率PNC、無功功率QNC波形如圖7(e)所示。分析圖7(d)和(e)可知,非關鍵負載承擔了源側有功功率波動,確保關鍵負載有功功率平穩,關鍵負載和非關鍵負載的無功功率始終能夠保持平穩,表明所提FLDC-RDO方法實現了有功功率、無功功率的解耦控制。
由圖7的分析結果可知,實驗結果與仿真結果一致,驗證了所提FLDC-RDO方法的有效性,能夠實現內環交流母線電流和外環有功功率、無功功率的解耦控制,響應快速,超調小,無靜差。
2)系統穩定性和魯棒性測試
設置交流微電網源側有功功率期望值波動與圖7(a)一 致,在t=2 s時,ACES濾 波 電 感 值Lf從2.40 mH突增至2.64 mH;在t=4 s時,關鍵負載值ZC從1 600 Ω突 降 至1 500 Ω。采 用 所 提FLDCRDO方法的實驗結果如圖8所示。
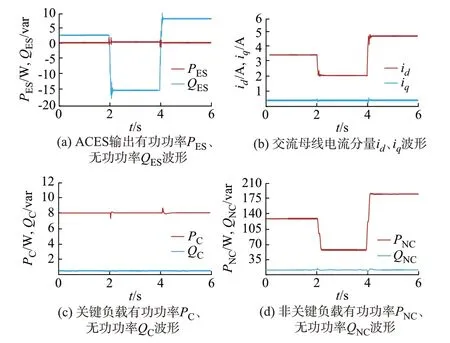
圖8 系統穩定性和魯棒性測試實驗波形Fig.8 Experimental waveforms of system stability and robustness testing
ACES輸出有功功率PES、無功功率QES波形如圖8(a)所示。比較圖7(b)和圖8(a)可知,當源側有功功率波動、ACES參數攝動和關鍵負載突變同時發生,ACES輸出有功功率PES、無功功率QES出現了較大超調,調節時間稍長,但經快速調整能夠恢復平穩,實現了解耦控制期望性能。
交流母線電流分量id、iq波形如圖8(b)所示。比較圖7(c)和圖8(b)可知,所提FLDC-RDO方法實現了交流母線電流分量id、iq解耦,id、iq跟蹤參考軌跡動態響應快速,穩態誤差小。
關鍵負載有功功率PC、無功功率QC波形如圖8(c)所示,非關鍵負載有功功率PNC、無功功率QNC波形如圖8(d)所示。比較圖7(d)、(e)和圖8(c)、(d)可知,ACES參數攝動和關鍵負載突變對于非關鍵負載無功功率跟蹤性能有較明顯的影響,但依然能夠在經過小幅度波動后快速恢復平穩,關鍵負載有功功率PC、無功功率QC和非關鍵負載有功功率PNC動、靜態性能維持較好,閉環控制系統能夠實現高性能的功率解耦控制。
由圖8分析可知,所提FLDC-RDO方法能夠有效抑制ACES參數攝動和關鍵負載變化帶來的不利影響,實現了較優的解耦控制性能,閉環控制系統穩定性好,魯棒性強。
6 結語
針對交流微電網中ACES解耦控制問題,本文提出基于魯棒擾動觀測器的反饋線性化控制方法。通過構建ACES兩輸入/兩輸出李導數仿射模型,設計解耦矩陣和狀態變換矩陣,實現ACES完全解耦和完全線性化轉換,并提出形式簡單的魯棒擾動觀測器求解狀態量誤差,消除不確性擾動對交流母線電流參考軌跡跟蹤性能的影響,且閉環控制系統保持全局漸進穩定。通過MATLAB/Simulink仿真,驗證了在源側電壓波動、源側功率波動、電網線路參數變化、負載突變、ACES參數攝動情形下所提方法的正確性和可行性,并具有以下結論:
1)精確反饋線性化控制方法可以實現ACES的完全解耦和完全線性化轉換,簡化了功率控制器的設計。
2)形式簡單的魯棒擾動觀測器能夠消除未建模參數擾動對精確反饋線性化方法控制性能的影響,增強閉環控制系統魯棒性。
3)可以通過極點配置完成閉環系統參數優化設置,參數整定過程簡單便捷,避免了反復試湊。
本文所提方法具有結構簡單、響應快速、穩定域寬、魯棒性強的特點,可拓寬ACES工程應用適應性。但單個ACES調節能力有限,基于本文所提方法,提出適用于多ACES協調運行,實現交流微電網母線電壓平穩的控制策略是值得進一步深入研究的技術問題。
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
今日農業(2021年14期)2021-10-14 08:35:28
中學生數理化(高中版.高考理化)(2021年6期)2021-07-28 06:21:04
海峽姐妹(2020年8期)2020-08-25 09:30:18
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
NBA特刊(2014年7期)2014-04-29 00:44:03
中國商人(2013年1期)2013-12-04 08:52:52