新型主從控制微電網(wǎng)運行控制策略研究
2021-08-23 12:36:50周凌志任永峰陳麒同武欣宇賈東衛(wèi)
可再生能源 2021年8期
周凌志,任永峰,陳麒同,武欣宇,賈東衛(wèi),祝 榮
(內(nèi)蒙古工業(yè)大學(xué) 能源與動力工程學(xué)院,內(nèi)蒙古 呼和浩特010080)
摘 要:文章結(jié)合傳統(tǒng)主從控制與對等控制的優(yōu)點,提出了一種新型主從控制微電網(wǎng)協(xié)調(diào)控制策略,即把多個采用改進(jìn)型下垂控制的分布式電源作為主控單元,其余分布式電源采用PQ控制作為從屬單元。在對微電網(wǎng)結(jié)構(gòu)以及微電源變流器控制策略進(jìn)行理論分析的基礎(chǔ)上,建立了新型主從控制微電網(wǎng)系統(tǒng)模型。設(shè)計并離網(wǎng)切換、負(fù)荷突增以及主控微電源發(fā)生故障工況時,對微電網(wǎng)系統(tǒng)的主要參數(shù)和運行特性進(jìn)行深入分析。仿真結(jié)果表明,新型主從控制微電網(wǎng)協(xié)調(diào)控制策略可以滿足不同工況下的系統(tǒng)運行需要,實現(xiàn)功率自動調(diào)節(jié)和系統(tǒng)頻率電壓恢復(fù),具有較好的適應(yīng)性和穩(wěn)定性。
關(guān)鍵詞:微電網(wǎng);新型主從控制;改進(jìn)型下垂控制;混合協(xié)調(diào)控制
中圖分類號:TK51 文獻(xiàn)標(biāo)志碼:A 文章編號:1671-5292(2021)08-1100-07
0 引言
通過電力電子技術(shù)將微電網(wǎng)中不同類型的分布式電源(Distributed Generation,DG)整合,在一定程度上克服了分布式電源出力隨機(jī)性和波動性缺陷,提高了可再生能源利用率[1]~[3]。但是,微電網(wǎng)要實現(xiàn)持續(xù)穩(wěn)定運行,須要對內(nèi)部DG進(jìn)行合理的協(xié)調(diào)控制。
目前,單個微電源的控制方法主要有并網(wǎng)時PQ控制、孤島時V/f控制和下垂控制(Droop控制)。結(jié)合不同控制要求,根據(jù)微電源類型的差異性,又可以將不同的控制方法相結(jié)合,設(shè)計出微電網(wǎng)的3種綜合控制策略:主從控制、對等控制和分層協(xié)調(diào)控制,從而實現(xiàn)微電網(wǎng)的綜合控制[4]~[6]。傳統(tǒng)主從控制常與微電源逆變器PQ控制、V/f控制相結(jié)合,文獻(xiàn)[7]~[9]在微電網(wǎng)離網(wǎng)運行時,主控單元由PQ控制切換到V/f控制,從屬單元仍維持PQ控制以實現(xiàn)最大功率輸出。該種方法能成功切換微電網(wǎng)運行狀態(tài),但主控單元在控制策略切換過程中會對微電網(wǎng)系統(tǒng)的穩(wěn)定性造成一定的影響。文獻(xiàn)[10]針對中壓等級的主從控制孤島微電網(wǎng)中,主控單元無法正常消納無功電流的問題,提出協(xié)調(diào)主控單元和從屬單元的優(yōu)化故障控制策略,但并未考慮到微電網(wǎng)并離網(wǎng)模式的平滑切換。微電網(wǎng)的對等控制一般基于微電源逆變器的下垂控制,文獻(xiàn)[11]在計算下垂系數(shù)時考慮到了線路阻抗產(chǎn)生的影響,使得頻率控制精度得到提高。文獻(xiàn)[12]~[14]提出了無需切換控制方法的改進(jìn)型下垂控制策略。該策略可以穩(wěn)定地為微電網(wǎng)提供頻率與電壓支撐,但卻存在動態(tài)響應(yīng)差、難以實現(xiàn)功率快速分配的缺點。微電網(wǎng)分層控制策略則是依靠最上層的配網(wǎng)管理系統(tǒng),結(jié)合經(jīng)濟(jì)性與安全性的要求去協(xié)調(diào)控制微電網(wǎng)的運行,對通信帶寬有很高的要求[15]~[18]。
本文提出了一種新型的微電網(wǎng)主從控制策略。該控制策略結(jié)合了傳統(tǒng)主從控制和對等控制的特點[19],將改進(jìn)型下垂控制運用到多個主控單元中,使其可以根據(jù)系統(tǒng)運行的需要合理分配出力,并維持微電網(wǎng)頻率與電壓的穩(wěn)定。從屬單元運用PQ控制,實現(xiàn)最大功率恒定輸出。仿真結(jié)果顯示,本文所提的新型微電網(wǎng)主從控制策略可以在微電網(wǎng)并網(wǎng)轉(zhuǎn)孤島、微電源發(fā)生故障等各類工況下,自動調(diào)節(jié)微電源輸出功率,并恢復(fù)系統(tǒng)頻率和電壓,保證系統(tǒng)安全平穩(wěn)運行。
1 新型主從控制微電網(wǎng)的結(jié)構(gòu)與特點
本文研究的新型主從控制微電網(wǎng)系統(tǒng)結(jié)構(gòu)如圖1所示。系統(tǒng)主要由3個微電源DG1,DG2,DG3以及公共負(fù)荷組成。
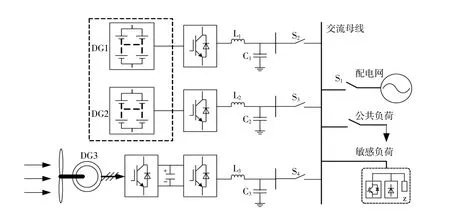
圖1 新型主從控制微電網(wǎng)系統(tǒng)結(jié)構(gòu)示意圖Fig.1 Structure diagram of new master-slave control for microgrid system
圖1中,微電源DG通過相應(yīng)的變換器連接到交流母線上,同時微電源和公共負(fù)荷都可以根據(jù)微電網(wǎng)系統(tǒng)運行需要,通過各自的斷路器實現(xiàn)與電網(wǎng)的連接或切斷,而LC濾波器則用于過濾高次諧波。在此微電網(wǎng)系統(tǒng)中,DG1與DG2采用了改進(jìn)型下垂控制策略來充當(dāng)微電網(wǎng)孤島運行時的主控單元,并且兩者參數(shù)完全相同。這是為了體現(xiàn)下垂控制所具有的功能冗余性,即單個下垂控制單元發(fā)生故障并不會影響整體系統(tǒng)的穩(wěn)定運行。DG3采用PQ控制策略來充當(dāng)微電網(wǎng)孤島運行時的從屬單元,以保證其能夠穩(wěn)定輸出恒定功率[20]。
本文研究的新型主從控制微電網(wǎng),在其并/離網(wǎng)運行狀態(tài)切換過程中,主控單元不須要改變控制策略,并且多個主控單元微電源可迅速協(xié)調(diào)完成系統(tǒng)負(fù)荷變化時的功率分配。當(dāng)某個主控單元發(fā)生故障時,其余主控單元可承擔(dān)其職能,以保證系統(tǒng)穩(wěn)定運行,省去了通信環(huán)節(jié),又使系統(tǒng)操作更加方便,運行更為可靠。本文研究的新型主從控制微電網(wǎng),在延續(xù)“即插即用”特點的同時,加入了PQ控制策略,使出力具有間歇性的微電源實現(xiàn)最大功率恒定輸出,保證系統(tǒng)經(jīng)濟(jì)運行性。
2 微電源變流器控制策略分析
2.1 改進(jìn)型下垂控制策略
由微電網(wǎng)中分布式電源的功率傳輸特性可知,微電源逆變器輸出的有功功率與電壓相位角、無功功率與輸出電壓存在線性關(guān)系,下垂控制便是基于這一理論通過模擬傳統(tǒng)同步發(fā)電機(jī)的下垂特性,對逆變器輸出的有功功率和無功功率進(jìn)行解耦控制,從而調(diào)節(jié)系統(tǒng)頻率和電壓,其控制結(jié)構(gòu)如圖2所示。
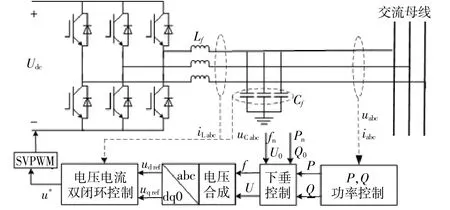
圖2 下垂控制結(jié)構(gòu)框圖Fig.2 Structure block diagram of droop control
圖2中,Lf和Cf分別為濾波電感和濾波電容,該控制系統(tǒng)主要由功率計算、下垂控制和電壓電流雙閉環(huán)控制3部分構(gòu)成。逆變器輸出的三相電壓和電流通過功率計算以及低通濾波環(huán)節(jié),得到平均有功功率和無功功率;再經(jīng)過下垂控制環(huán)節(jié)得到輸出頻率和電壓幅值的指令值,將其作為電壓電流雙閉環(huán)控制的給定,從而產(chǎn)生逆變器的SVPWM輸入信號,實現(xiàn)系統(tǒng)有功和無功功率的合理分配。
依照P-f和Q-U的線性關(guān)系,其相對應(yīng)的下垂控制關(guān)系式為
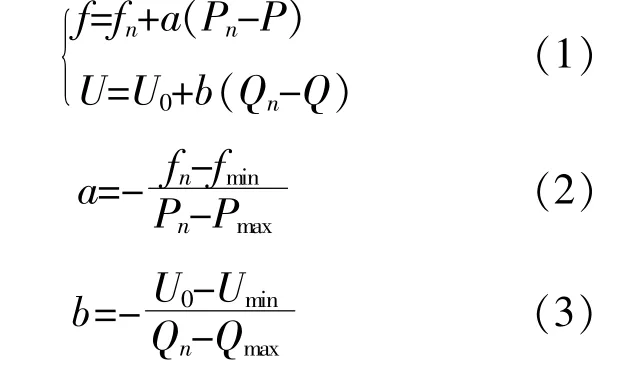
式中:fn為電網(wǎng)額定頻率;U0為逆變器額定電壓幅值;Pn,Qn分別為微電源逆變器的額定有功、無功功率;P,Q分別為逆變器輸出的平均有功、無功功率;a,b分別為有功、無功的下垂系數(shù);Pmax為頻率下降至最小值fmin時,微電源逆變器允許輸出的最大有功功率;Qmax為電壓幅值下降至最小值Umin時,微電源逆變器允許輸出的最大無功功率;f,U為下垂控制后,微電源逆變器輸出頻率和電壓幅值的指令值。
傳統(tǒng)下垂控制中,有功、無功下垂特性是位置固定的曲線。當(dāng)逆變器輸出的有功、無功功率發(fā)生變化時,其相應(yīng)的頻率和電壓幅值也會隨之改變,不利于系統(tǒng)的穩(wěn)定。本文提出改進(jìn)型下垂控制的原理如圖3所示。
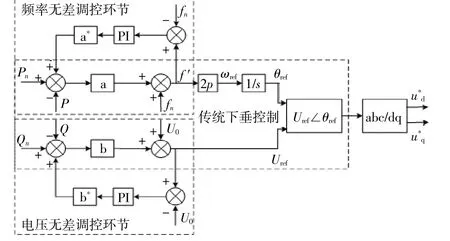
圖3 改進(jìn)型下垂控制原理框圖Fig.3 Principle block diagram of improved droop control
改進(jìn)型下垂控制是在原有傳統(tǒng)下垂控制基礎(chǔ)上,引入了反饋環(huán)節(jié),通過調(diào)整逆變器額定輸出功率實現(xiàn)頻率、電壓無差調(diào)控,并且其調(diào)整量會隨著系統(tǒng)運行狀態(tài)自適應(yīng)改變,從而保證微電網(wǎng)系統(tǒng)穩(wěn)定運行。此控制原理具體表達(dá)式為
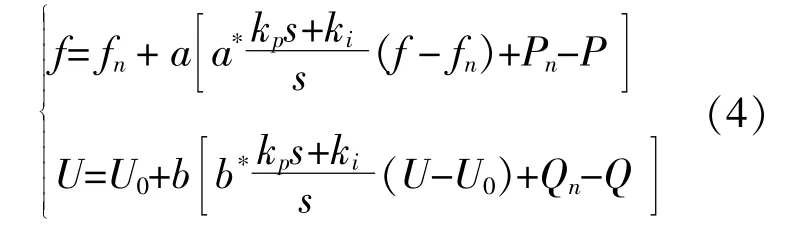
式中:a*,b*為修正后的下垂系數(shù);kp,ki分別為PI控制的比例、積分系數(shù);s為拉普拉斯算子。
對比式(1),(4)后可知,本文所提的控制方法將頻率差和電壓差作為反饋信號,其經(jīng)過PI控制環(huán)節(jié)再乘以修正后的下垂系數(shù)后可對系統(tǒng)預(yù)設(shè)的逆變器額定有功、無功功率進(jìn)行調(diào)整,最終實現(xiàn)頻率、電壓的無差調(diào)控。
改進(jìn)型下垂控制的P-f和Q-U下垂特性滿足圖4所示的曲線。P-f下垂控制具體過程:根據(jù)設(shè)定系統(tǒng)初始運行在A點,此時逆變器額定有功功率為Pn,頻率為fn;當(dāng)微電網(wǎng)運行狀態(tài)變化時,逆變器輸出的有功功率增加,系統(tǒng)由A點向B點移動,頻率降低;改進(jìn)后的下垂控制將自適應(yīng)調(diào)整額定有功功率使頻率恢復(fù),此時系統(tǒng)經(jīng)過調(diào)整后重新運行在C點,微電網(wǎng)穩(wěn)定運行。Q-U下垂控制同理。
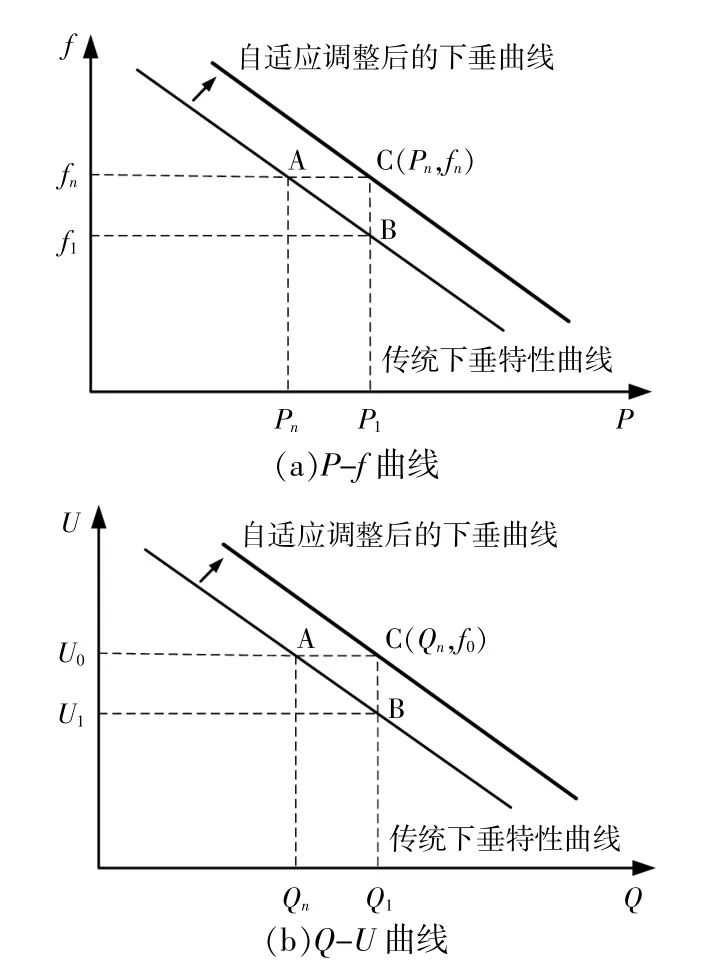
圖4 改進(jìn)型下垂控制特性圖Fig.4 Droop characteristic diagram of improved droop control
2.2 PQ控制策略
PQ控制策略主要包含功率控制與電流控制兩個環(huán)節(jié),在將有功功率和無功功率解耦后對電流進(jìn)行PI控制,從而控制逆變器來保證微電源按照給定值輸出恒定的有功、無功功率。為了使可再生能源得到充分利用,通常在并網(wǎng)時對間歇性分布式電源采取PQ控制,其控制結(jié)構(gòu)框圖如圖5所示[21]。
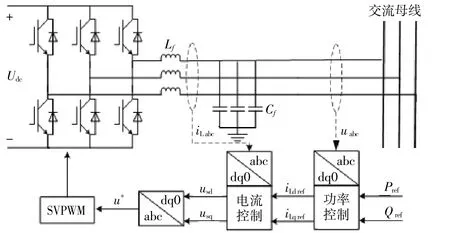
圖5 PQ控制結(jié)構(gòu)框圖Fig.5 Structure block diagramof PQcontrol
圖5中,逆變器輸出的三相電壓經(jīng)過電壓矢量定向的Park變換后,得到旋轉(zhuǎn)dq坐標(biāo)系下的ud為常數(shù),uq為0;再根據(jù)設(shè)定的功率參考值可以得到逆變器輸出的參考電流為
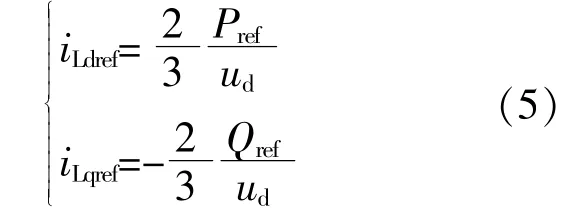
式中:iLdref和iLqref為逆變器輸出參考電流的d,q軸分量;Pref和Qref為設(shè)定的有功、無功功率參考值。
由式(5)可知,通過功率控制環(huán)節(jié)后,原本對逆變器輸出功率的控制就轉(zhuǎn)變?yōu)閷﹄娏鞯目刂疲⑶铱刂芼軸電流即控制有功功率,控制q軸電流即控制無功功率。
電流控制環(huán)節(jié)將實際電感電流與參考電感電流相比較,其差值經(jīng)過PI調(diào)節(jié),再加上dq解耦和電壓前饋補償后得到SPWM調(diào)制信號,具體表達(dá)式為
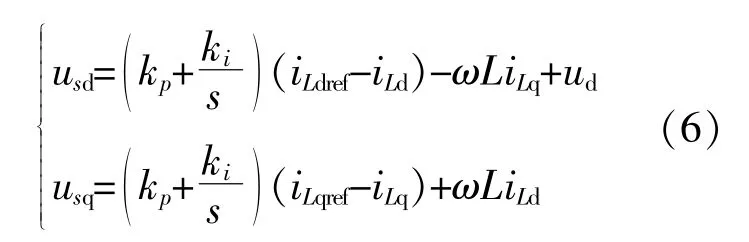
根據(jù)式(6)可得PQ控制原理如圖6所示。
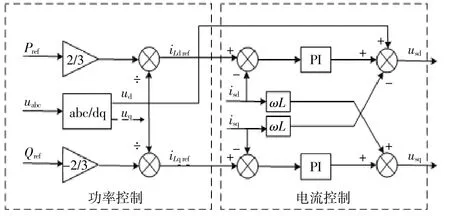
圖6 PQ控制原理框圖Fig.6 Principle block diagram of PQ control
3 仿真分析
為了驗證本文提出的新型微電網(wǎng)主從控制策略的有效性,在Matlab/Simulink中搭建了圖1所示的主從控制微電網(wǎng)系統(tǒng)模型,并設(shè)置了4種典型工況,對其在不同工況下的運行狀態(tài)進(jìn)行分析。仿真參數(shù)選取:微電源中直流側(cè)電壓Udc=1 200 V,濾波參數(shù)Lf=0.5 mH,Cf=2 500μF;DG1和DG2采用改進(jìn)型下垂控制,設(shè)定初始額定功率Pn=250 kW,Qn=0 kVar,fn=50 Hz,U0=511 V,下垂系數(shù)a=5×10-7,b=1×10-4,修正的下垂系數(shù)a*=2×103,b*=1×103,頻率和電壓的PI控制中Kp1=10,Ki1=200,電壓、電流雙環(huán)結(jié)構(gòu)中電壓環(huán)Kp=1.5,Ki=0.5,電流環(huán)Kp2=0.5,Ki2=20;DG3采用PQ控制,設(shè)定功率預(yù)設(shè)值Pref=1 000 kW,Qref=0 kvar,電流環(huán)中Kp3=1,Ki3=100;負(fù)荷采用恒定功率負(fù)荷,P=1 500 kW,Q=0 kvar;系統(tǒng)仿真時間為2 s。0~0.3 s,微電網(wǎng)并網(wǎng)運行,此時各DG按系統(tǒng)需求輸出功率。0.3 s,斷路器S1斷開,微電網(wǎng)進(jìn)行并網(wǎng)/孤島模式切換;0.3~0.9 s微電網(wǎng)孤島運行;0.9 s,斷路器S5閉合投入公共負(fù)荷;0.9~1.5 s微電網(wǎng)在負(fù)荷突變工況下運行;1.5 s,斷路器S3斷開,切除主控微電源DG2;1.5~2 s微電網(wǎng)在DG2發(fā)生故障時運行。
圖7為本文提出的新型主從控制微電網(wǎng)的仿真曲線,其中包含了DG1,DG2,DG3、負(fù)荷以及電網(wǎng)在不同工況下有功和無功功率的變化,同時母線處電壓、頻率的波動情況也得以體現(xiàn)。

圖7 新型主從控制微電網(wǎng)的仿真曲線Fig.7 Simulation curves of new master-slave control for microgrid
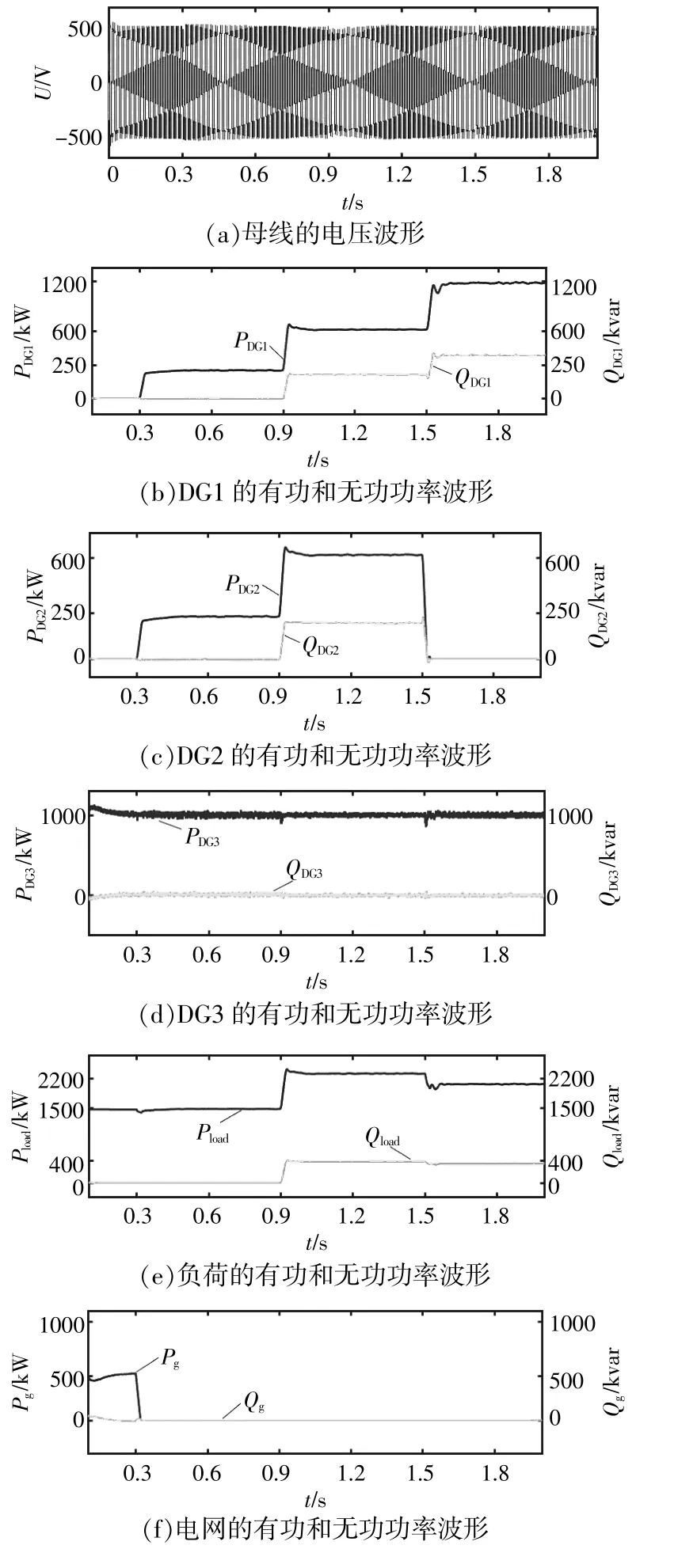
由圖7可知,系統(tǒng)并網(wǎng)運行時母線電壓和頻率由配電網(wǎng)提供,DG3采用PQ控制策略,按照預(yù)設(shè)值恒定輸出1 000 kW有功功率,而配電網(wǎng)則輸出500 kW有功功率以滿足系統(tǒng)負(fù)荷需求,此時DG1,DG2無須輸出功率,但須要為系統(tǒng)壓頻穩(wěn)定發(fā)揮輔助調(diào)節(jié)作用。0.3 s后,系統(tǒng)進(jìn)入孤島運行工況,此時DG1,DG2作為主控單元為微電網(wǎng)提供電壓與頻率支撐,并各自輸出約250 kW有功功率,配合DG3滿足系統(tǒng)負(fù)荷需求。由圖7(a),(g)可以發(fā)現(xiàn),0.3 s微電網(wǎng)并/離網(wǎng)運行模式切換時,系統(tǒng)母線電壓和頻率分別下降了約4%,0.02%后又自行恢復(fù)。圖7(d)顯示DG3在0.3 s時,輸出功率下降至945 kW,且0.36 s時又恢復(fù)至1 000 kW左右,證明此控制策略可以有效實現(xiàn)微電網(wǎng)運行模式切換,且降低了主控單元對其余從屬單元的影響。
0.9 s時,微電網(wǎng)中負(fù)荷突變,負(fù)荷新增700 kW有功功率、400 kvar無功功率。由于從屬單元DG3依舊按照設(shè)定值輸出功率,所以負(fù)荷功率變化由多個主控單元共同承擔(dān)并自動調(diào)整輸出功率分配,此時DG1,DG2各自輸出有功功率600 kW,無功功率200 kvar。1.5 s時,微電網(wǎng)主控單元中的DG2發(fā)生故障斷開,系統(tǒng)在出現(xiàn)短暫的頻率和電壓波動后仍保持正常運行,并且頻率在1.65 s時又恢復(fù)至50 Hz,因為剩余的主控單元DG1可以承擔(dān)其職能,自動調(diào)整輸出至有功功率1 200 kW,無功功率400 kvar左右,在此期間從屬單元DG3幾乎不受主控單元故障影響,依舊恒定輸出1 000 kW有功功率來共同維持系統(tǒng)穩(wěn)定運行。結(jié)合圖7(g)可以看出,每次微電網(wǎng)運行工況發(fā)生變化時系統(tǒng)頻率都會出現(xiàn)一定程度的波動,但由于改進(jìn)型下垂控制的作用,約0.1 s后系統(tǒng)頻率又自行恢復(fù)至50 Hz。
圖8和圖9為本文所述微電網(wǎng)系統(tǒng)分別運用傳統(tǒng)下垂控制和改進(jìn)型下垂控制時的系統(tǒng)頻率和母線電壓波形對比。
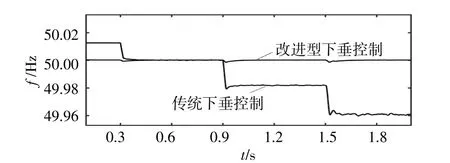
圖8 運用傳統(tǒng)和改進(jìn)型下垂控制時的系統(tǒng)頻率波形對比Fig.8 Comparison of system frequency waveform with traditional and improved droop control

圖9 運用傳統(tǒng)和改進(jìn)型下垂控制時的母線電壓波形對比Fig.9 Comparison of system voltage waveforms with traditional and improved droop control
由圖8,9可知,運用傳統(tǒng)下垂控制時,在微電網(wǎng)運行工況發(fā)生變化時頻率和電壓產(chǎn)生跌落。此變化符合下垂特性即輸出功率增加,系統(tǒng)頻率和電壓減小,但是其產(chǎn)生的系統(tǒng)頻率和電壓偏差更大且后續(xù)無法自動恢復(fù)。經(jīng)過對比后則可以發(fā)現(xiàn),運用改進(jìn)型下垂控制時的系統(tǒng)頻率和母線電壓能夠在產(chǎn)生偏差后迅速恢復(fù)。本文提出的改進(jìn)型下垂控制性能優(yōu)于傳統(tǒng)下垂控制,且更有助于實現(xiàn)微電網(wǎng)系統(tǒng)的穩(wěn)定運行。
4 結(jié)論
本文提出了一種新型的微電網(wǎng)主從控制策略,通過仿真研究得出以下結(jié)論:①將多個主控單元運用改進(jìn)型下垂控制,從屬單元運用PQ控制,可以使微電網(wǎng)在運行模式切換時微電源無須改變控制策略,同時還降低了微電網(wǎng)對單臺主控單元的依賴性,提高了微電網(wǎng)工作適應(yīng)性;②通過改進(jìn)型下垂控制策略,微電源根據(jù)不同工況自動恢復(fù)功率調(diào)節(jié)和系統(tǒng)頻率電壓,增強(qiáng)了微電網(wǎng)運行穩(wěn)定性。