絕熱層纏繞成型糾偏方法與控制研究
2021-08-21 20:29:31肖揚侯增選嚴(yán)文聰張偉超邱傳森
機電工程技術(shù) 2021年12期
肖揚 侯增選 嚴(yán)文聰 張偉超 邱傳森
摘要:研究了固體火箭發(fā)動機絕熱層纏繞成型過程中膠帶跑偏問題,設(shè)計了相應(yīng)的糾偏控制方法。首先分析了纏繞成型過程中膠帶跑偏的原因,提出了相應(yīng)的糾偏方案和控制系統(tǒng)。分析了控制系統(tǒng)的硬件組成,并結(jié)合糾偏方案建立了完整的糾偏控制系統(tǒng)數(shù)學(xué)模型。基于該模型設(shè)計了電流環(huán)、轉(zhuǎn)速環(huán)和整體位置環(huán)的三閉環(huán)糾偏控制策略并進行了仿真驗證。其中電機內(nèi)的電流環(huán)和轉(zhuǎn)速環(huán)采用 PI 控制;在內(nèi)環(huán)設(shè)計基礎(chǔ)上,整體位置環(huán)采用模糊自整定 PID 控制,通過設(shè)計算法動態(tài)調(diào)整 PID 參數(shù)。Simulink仿真結(jié)果表明,電流環(huán)能夠?qū)⒊{(diào)抑制在4.61%,轉(zhuǎn)速環(huán)調(diào)節(jié)時間短(0.015 s),兩環(huán)的動態(tài)性能良好,且無穩(wěn)態(tài)誤差。通過與 PID控制對比,模糊自整定 PID控制的響應(yīng)曲線抑制超調(diào)能力明顯(3.00%),調(diào)節(jié)速度快(0.367 s),且曲線過渡光滑,這表明糾偏效果要優(yōu)于 PID 控制。關(guān)鍵詞:絕熱層;纏繞成型;糾偏方案;控制系統(tǒng);PI ;模糊自整定 PID
中圖分類號:TB3???????????? 文獻標(biāo)志碼:A
文章編號:1009-9492(2021)12-0045-05????????????????????????? 開放科學(xué)(資源服務(wù))標(biāo)識碼(OSID):
Research on Rectification Control Method of Winding Molding of Heat Insulation
Xiao Yang1,Hou Zengxuan1※,Yan Wencong2,Zhang Weichao1,Qiu Chuansen1
(1.School of Mechanical Engineering, Dalian University of Technology, Dalian, Liaoning 116024, China;
2.Xi′an Aerospace Composites Research Institute, Xi′an 710025, China)
Abstract: A corresponding rectification control method was designed for the problem of the deviation of the tape position during the winding molding of heat insulation of solid rocket motor. First, the reasons for the deviation of the tape during the winding molding were analyzed, and the rectification scheme and control system were proposed. The hardware composition of the control system was analyzed, and a complete mathematical model of the rectification control system was established based on the rectification scheme. Based on the model, a three-closed loop rectification control strategy including current loop, speed loop and overall position loop was designed and verified by simulation. The current loop and speed loop in the motor adopted PI control to realize steady-state errors adjustment, based on the inner loop design, the overall position loop adopted Fuzzy self-tuning PID control, and the PID parameters were dynamically adjusted through the design algorithm. Simulink results show that the current loop can suppress the overshoot to 4.61%, the speed loop adjustment time is short (0.015 s) , the dynamic performance of the two loops is good, and there is no steady-state error. Compared with PID control, the response curve of Fuzzy self-tuning PID control has obvious overshooting ability (3.00%) , fast adjustment speed (0.367 s) , and smooth curve transition, whichshows that the rectification effect is better than PID control.
Key words: heat insulation; winding molding; rectification scheme; control system; PI; Fuzzy self-tuning PID
0 引言
固體火箭發(fā)動機是一種性能優(yōu)越的火箭動力裝置,為了保證發(fā)動機殼體在運行過程中的穩(wěn)定性,需要在殼體內(nèi)襯一層絕熱層,用于隔離固體燃料和殼體,因此絕熱層的成型質(zhì)量非常重要。目前國內(nèi)主要采用人工貼片的方法實現(xiàn)絕熱層成型,勞動強度大、效率低、且成型質(zhì)量穩(wěn)定性差,因此急需開展絕熱層纏繞成型工藝的研究[1]。
在纏繞成型過程中,膠帶需要按照預(yù)定軌跡由壓輥纏繞到芯模表面,但在實際運行當(dāng)中,受各類干擾因素的影響,膠帶不可避免地會發(fā)生跑偏[2]。膠帶跑偏會使絕熱層局部材料堆疊或漏縫,降低絕熱層成型質(zhì)量;跑偏嚴(yán)重時,膠帶可能脫離壓輥,逼停纏繞過程。因此在纏繞過程中必須進行纏繞膠帶糾偏,保證膠帶纏繞位置準(zhǔn)確。王志輝等[3]針對殼體纖維纏繞提出了模糊 PID 復(fù)合控制方案,但并未進行詳細的方案設(shè)計與驗證。楊開平等[4]針對復(fù)合材料纏繞工藝,在建模基礎(chǔ)上對糾偏控制系統(tǒng)的穩(wěn)定性進行分析并設(shè)計了智能算法,但其仿真模型過于簡化,可靠性不高。何曉東等[5]針對復(fù)合材料纏繞過程,分析了雙輥糾偏的傳動特性,并與 PID 控制對比驗證了模糊糾偏策略的優(yōu)越性,但是其糾偏動作緩慢,時間過長。
本文首先分析絕熱層纏繞過程中膠帶跑偏的原因,并進行了糾偏方案的設(shè)計。其次建立了完整的糾偏控制系統(tǒng)的數(shù)學(xué)模型,并基于電機模型設(shè)計了雙閉環(huán)調(diào)速系統(tǒng)的 PI 控制。最后基于整體模型設(shè)計了模糊自整定 PID 控制策略,利用模糊算法調(diào)整 PID 參數(shù),并進行了 Simu? link仿真驗證。
1 纏繞膠帶跑偏原因分析
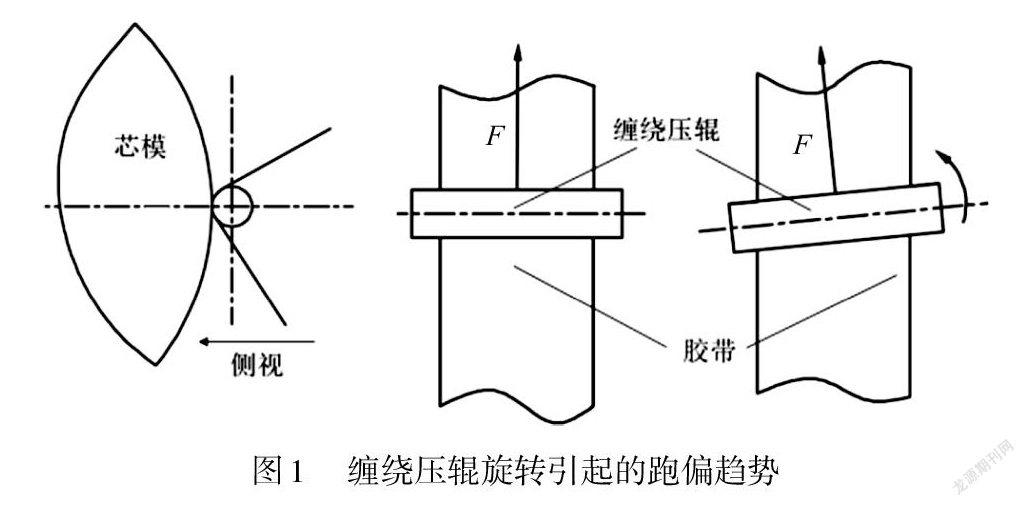
如圖1所示,當(dāng)采用環(huán)向纏繞方法時,纏繞壓輥需旋轉(zhuǎn)給定纏繞角,纏繞壓輥對膠帶產(chǎn)生一個橫向作用分力,從而導(dǎo)致膠帶橫向跑偏趨勢。
除壓輥姿態(tài)影響外,膠帶在運行過程中同樣會受到膠帶斷面不均勻、導(dǎo)向輥的幾何形狀及安裝誤差、膠帶盤不規(guī)則和自動化纏繞過程中膠帶運動、振動等跑偏因素的影響[6]。因此,在固體火箭發(fā)動機絕熱層纏繞成型過程中必須對膠帶跑偏趨勢進行抑制,并對跑偏膠帶進行糾偏。
2 糾偏方案設(shè)計
糾偏方案如圖2所示,糾偏輥安裝在纏繞壓輥上方。第一步,纏繞開始時,纏繞壓輥旋轉(zhuǎn)給定的纏繞角,為抑制膠帶跑偏趨勢,在纏繞壓輥旋轉(zhuǎn)給定的纏繞角時,同步控制糾偏輥反方向旋轉(zhuǎn)相應(yīng)角度。第二步,其他原因引起的膠帶跑偏,通過紅外傳感器實時檢測膠帶偏移情況,計算膠帶位置偏差信息,在原有糾偏角度基礎(chǔ)上對糾偏輥旋轉(zhuǎn)角度進行微調(diào),保證膠帶纏繞位置。微調(diào)過程由自動糾偏控制系統(tǒng)實現(xiàn)。
如圖3所示,自動控制糾偏系統(tǒng)由傳感器、控制器、電機和傳動機構(gòu)組成。在本控制系統(tǒng)中,選擇利用 RLK-168紅外傳感器檢測膠帶位置,該傳感器采用入射式結(jié)構(gòu),占用空間小,適用于空間局促的纏繞頭部。控制器選擇 STM32單片機,作為自動糾偏控制系統(tǒng)的核心,實現(xiàn)信號的處理和傳遞。直流電機具啟動性能良好、大范圍內(nèi)調(diào)速平滑、可靠性高且易于控制的優(yōu)點,適用于動作頻繁,跟隨性能要求高的糾偏控制,因此選擇利用直流電機和蝸輪蝸桿組成傳動機構(gòu)[7]。
3 糾偏控制系統(tǒng)模型
糾偏控制系統(tǒng)的原理如圖4所示,利用紅外傳感器實時檢測膠帶實際位置,并與基準(zhǔn)位置比較,當(dāng)檢測到偏移量超過允許范圍時,單片機輸出控制指令驅(qū)動直流電機轉(zhuǎn)動,帶動蝸輪蝸桿和糾偏輥,令膠帶位置回正,構(gòu)成閉環(huán)位置控制系統(tǒng)[8]。
根據(jù)糾偏原理,為了保證糾偏控制系統(tǒng)的性能,既需要保證糾偏各環(huán)節(jié)的精度足夠高,也需要糾偏控制算法的性能夠優(yōu)良。因此需要針對糾偏過程設(shè)計相應(yīng)的控制算法。驗證糾偏算法的功能性,首先需要建立糾偏控制整體的數(shù)學(xué)模型。數(shù)學(xué)模型的主要環(huán)節(jié)包括傳感器、直流電機、蝸輪蝸桿和糾偏輥。
(1) 傳感器
RLK-168紅外傳感器,結(jié)構(gòu)緊湊且靈敏度高。采用邊緣檢測的測量方式,傳感器安裝方向垂直于膠帶運行方向,這樣檢測到的跑偏量與輸出模擬電壓量呈正比,可得該環(huán)節(jié)的傳遞函數(shù)為:
(2) 直流電機
直流電機采用 PWM 變換器,通過改變占空比進行調(diào)壓調(diào)速,PWM 輸出平均電壓與單片機的輸出電壓呈正比,且其響應(yīng)延遲時間不超過一個開關(guān)周期[9],由此可得:
直流電機電壓驅(qū)動回路的方程為:
經(jīng)過拉普拉斯變換可得:
式中: Tl = L/R ,為電機驅(qū)動回路的電氣時間常數(shù)。
又根據(jù)轉(zhuǎn)矩平衡方程,可得電磁轉(zhuǎn)矩與電驅(qū)電流成正比:
同理可得負載轉(zhuǎn)矩與對應(yīng)電流的轉(zhuǎn)矩計算公式為:
輸出轉(zhuǎn)矩與電機轉(zhuǎn)速間的關(guān)系為:
又根據(jù)電磁感應(yīng)定律:
綜合式(5)~ (8) 并進行拉氏變換后可得電流與電感之間的關(guān)系式為:
結(jié)合式(4)、(8) 和(9) 可得直流電機的動態(tài)模型如圖5所示。
選用直流電機相關(guān)參數(shù)如表1所示。
(3) 蝸輪蝸桿
傳動機構(gòu)采用蝸輪蝸桿,其輸入轉(zhuǎn)速與輸出轉(zhuǎn)速之間的比值為傳動比,而輸出轉(zhuǎn)角與輸出轉(zhuǎn)速之間為積分關(guān)系,因此可得輸入轉(zhuǎn)速與輸出轉(zhuǎn)角之間的模型為:
(4) 糾偏輥
由于糾偏輥轉(zhuǎn)動角度很小,在小范圍內(nèi)可將糾偏輥轉(zhuǎn)動角度與糾偏量近似為比例關(guān)系,即 y = l sin θ≈lθ,由此可得糾偏輥與轉(zhuǎn)動角度之間的動態(tài)模型為:
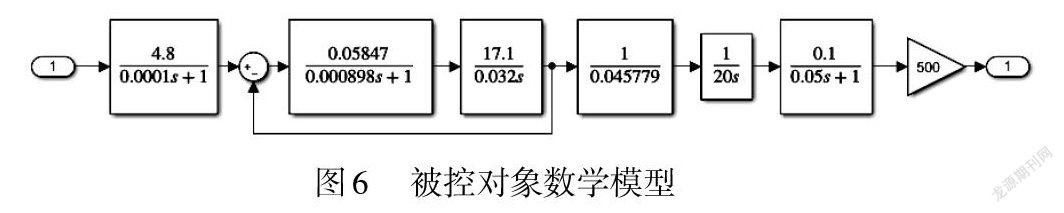
Simulink 是 Matlab 內(nèi)的可視化仿真工具,具有豐富強大的模塊庫,因此非常適用于動態(tài)系統(tǒng)的建模和仿真[10]。因此,選擇在 Smimulik中建立數(shù)學(xué)模型并進行相應(yīng)的算法驗證。根據(jù)上述分析后可建立未加控制的被控對象模型如圖6所示。根據(jù)圖中各環(huán)節(jié)公式可以看出,糾偏系統(tǒng)本身包含多個積分和慣性環(huán)節(jié),在不加控制器的情況下,輸出會非常不穩(wěn)定。接下來根據(jù)該模型設(shè)計相應(yīng)的算法并進行仿真驗證。
由于跑偏信號的復(fù)雜多變,參數(shù)固定的 PID 控制并不能取得理想的控制效果。如果能夠通過模糊算法實時調(diào)整 PID 參數(shù),可達到更佳的控制效果。因此選擇利用模糊自整定 PID 策略控制自動糾偏系統(tǒng)。而電機內(nèi)環(huán)(電流環(huán)和速度環(huán))利用 PI 算法進行整定,保證輸出轉(zhuǎn)速的穩(wěn)定。三環(huán)調(diào)整順序由內(nèi)而外,依次為電流環(huán)、速度環(huán)和整體位置環(huán)[11]。
4 糾偏控制策略仿真
4.1 內(nèi)環(huán)控制
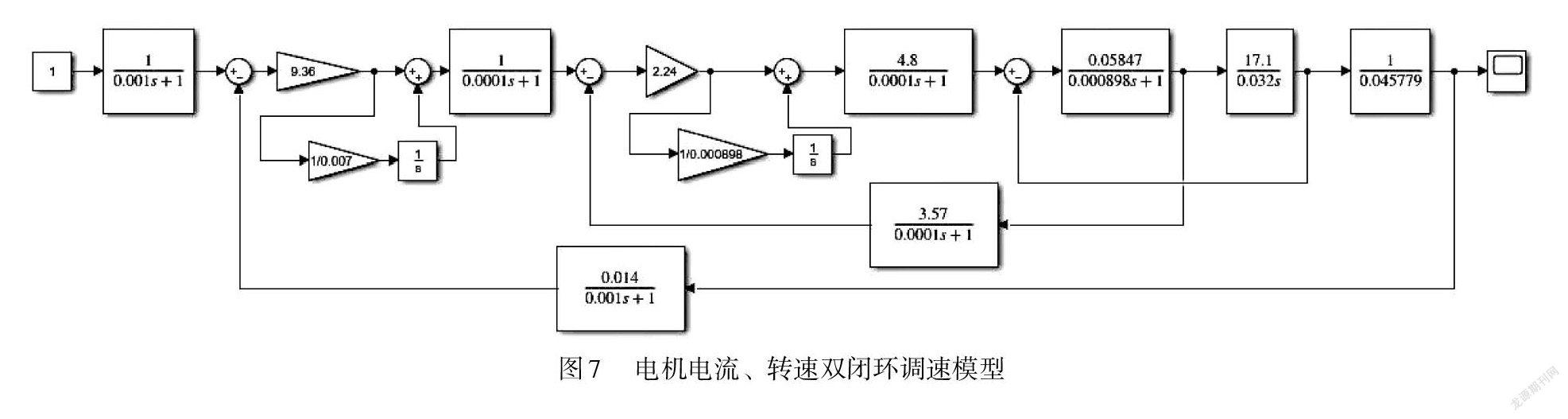
利用PI算法設(shè)計電流環(huán)和轉(zhuǎn)速環(huán),調(diào)整電流環(huán),能夠抑制電流超調(diào)量,提高控制電流的穩(wěn)定性,在電流環(huán)的基礎(chǔ)上調(diào)整轉(zhuǎn)速環(huán),可以提高轉(zhuǎn)速響應(yīng)速度,實現(xiàn)無靜差調(diào)速[12]。根據(jù)工程整定方法,可得如圖7所示電機閉環(huán)系統(tǒng)。
其中電流環(huán)ACR和轉(zhuǎn)速環(huán)ASR調(diào)節(jié)器的算法公式為:
將圖7中所示雙閉環(huán)直流電機模型封裝成塊并命名為“Motor Function”,便于與其他模塊連接。
分別給入電流環(huán)和轉(zhuǎn)速環(huán)單位階躍信號,響應(yīng)曲線如圖8~9所示。由于積分環(huán)節(jié)的存在,響應(yīng)曲線均無穩(wěn)態(tài)誤差。電流環(huán)超調(diào)量為4.61%,穩(wěn)態(tài)值為0.28 A ,進入誤差帶1%的調(diào)節(jié)時間為1.61×10-3 s ,電流環(huán)的 PI 控制對于超調(diào)的抑制作用明顯,且響應(yīng)速度快,表明電流變化對輸出轉(zhuǎn)速的干擾小。
如圖9所示,轉(zhuǎn)速環(huán)響應(yīng)曲線的超調(diào)量為38.8%,穩(wěn)態(tài)值為71.43 rad/s ,進入誤差帶1%的調(diào)節(jié)時間 Ts=0.015 s ,無明顯振蕩,穩(wěn)定性和快速性良好。
4.2 外環(huán)控制
外環(huán)采用模糊自整定 PID 方法進行調(diào)整,在已調(diào)試好的 PID 參數(shù)基礎(chǔ)上,根據(jù)跑偏量的實時情況進行參數(shù)調(diào)整,其數(shù)學(xué)關(guān)系如下:
式中: kp 為實時調(diào)整參數(shù); kp0為初始參數(shù);Δkp 為模糊整定輸出值,其余兩式同理。經(jīng)過參數(shù)整定, kp0 、 ki0和 kd0分別為0.40、0.70和0.02。
在 Matlab內(nèi)調(diào)用“fuzzy”命令打開模糊控制器工具箱,編譯界面如圖10左。考慮到兼顧模糊控制的精確性和運算復(fù)雜程度,設(shè)計以二維變量 e 和 ec 作為輸入, kp 、ki 、kd 的整定量為輸出的兩輸入三輸出控制器[13]。其得到的模糊變量 e 和 ec 分均取值[-1.5, 1.5] mm 和[-15,15]mm/s ,Δkp? 、Δki? 和Δkd? 的變量范圍取[-0.045,0.045],[-0.3,0.3],[-0.015,0.015]。取模糊工具箱內(nèi)編譯變量范圍為[-3,3],則比例和量化因子分別為2、0.2、0.015、0.1和0.005。輸入輸出各變量對應(yīng)的模糊子集均劃分為{NB ,NM ,NS ,ZE ,PS ,PM ,PB},隸屬函數(shù)以三角函數(shù)為主,考慮到函數(shù)分布的完備性、一致性和交互性[14],結(jié)合經(jīng)驗可得函數(shù)分布如圖10所示。
在編譯模糊規(guī)則時,首先應(yīng)依據(jù)如下原則:(1) 當(dāng)偏差 e 偏離穩(wěn)定值很大的時候,考慮到加快響應(yīng)速度,應(yīng)該選擇較大的 kp ; (2) 當(dāng)偏差 e 和偏差變化量 ec 都為中等的時候,選擇較小的 kp 和適當(dāng)?shù)?kd? ,減小超調(diào)量;(3)當(dāng)偏差比較小時,選擇較小的 kp 和較大的 ki ,提高系統(tǒng)的穩(wěn)定性;(4)如果偏差變化量比較大,那么應(yīng)該減小 kp ,增大Δki 。
基于上述調(diào)整原則,結(jié)合控制經(jīng)驗和多次調(diào)試后,整理出如表2~4編譯規(guī)則。
在 Simulink中建立如下PID 控制與模糊 PID 控制模塊并分別封裝并命名為“Fuzzy -pid”和“pid”,分別控制糾偏系統(tǒng)模型,通過觀測窗口可得曲線對比,仿真控制系統(tǒng)如圖11所示。
4.3 仿真結(jié)果對比
分別對整體位置環(huán)利用 PID 算法和模糊 PID 算法仿真模型輸入相同的階躍信號,仿真時間取2 s ,可得到如圖12所示的響應(yīng)曲線。
根據(jù)響應(yīng)曲線對比可得, PID 控制下的超調(diào)量為12.7%,調(diào)整時間為0.584 s ,且有明顯的振蕩過渡。模糊自整定控制下的超調(diào)量為3.00%,調(diào)整時間0.367 s,且曲線過渡光滑,無振蕩。通過對比可以明顯看出,模糊 PID 算法抑制超調(diào)的能力更為優(yōu)秀,調(diào)增時間更短,且沒有振蕩,穩(wěn)定性和快速性均優(yōu)于 PID 控制,因此可以認(rèn)為模糊 PID 算法的響應(yīng)態(tài)勢更為良好,更加適合作為糾偏控制策略。
5 結(jié)束語
本文首先分析了纏繞壓輥姿態(tài)對于膠帶跑偏的影響,其次設(shè)計了糾偏方案,保證能夠及時抑制糾偏趨勢且實時微調(diào)。分析了自動糾偏控制系統(tǒng)的原理,并建立了其各環(huán)節(jié)的數(shù)學(xué)模型,最后設(shè)計了糾偏控制策略,電機的電流環(huán)和轉(zhuǎn)速環(huán)采用 PI 控制,抑制了電流環(huán)超調(diào),實現(xiàn)了電機無靜差調(diào)速;糾偏系統(tǒng)采用模糊自整定 PID 控制,Simulink仿真結(jié)果表明,能夠快速穩(wěn)定實現(xiàn)糾偏動作,無振蕩、超調(diào)小、調(diào)節(jié)速度快。同理,該策略同樣可以供紙張、薄膜等帶材的糾偏控制借鑒。
參考文獻:
[1]趙有航.固體火箭發(fā)動機絕熱層自動纏繞成型軌跡規(guī)劃[D].大連:大連理工大學(xué),2020.
[2]閻龍, 江偉, 史耀耀.復(fù)合材料布帶纏繞糾偏控制系統(tǒng)設(shè)計[J].宇航學(xué)報,2012,33(8):1171-1176.
[3]王志輝,喬海洋, 陳宏娟.纖維帶纏繞智能糾偏控制系統(tǒng)設(shè)計與仿真[J].機電工程技術(shù),2005(11):36-38.
[4]楊開平, 史耀耀,何曉東,等.復(fù)合材料布帶纏繞智能糾偏控制技術(shù)[J].航空學(xué)報,2011,32(7):1318-1325.
[5]何曉東, 史耀耀,秦現(xiàn)生.復(fù)合材料布帶纏繞糾偏模糊控制技術(shù)研究[J].西北工業(yè)大學(xué)學(xué)報,2014,32(3):464-469.
[6]史耀耀,袁燁,徐文秀.基于數(shù)字 PID 控制的智能糾偏系統(tǒng)設(shè)計[J].機械制造,2009,47(7):32-34.
[7]朱章.物料糾偏系統(tǒng)的設(shè)計[D].武漢:武漢理工大學(xué),2011.
[8]張培娟.對帶材收卷過程中正弦式跑偏的跟蹤控制[D].杭州:杭州電子科技大學(xué),2013.
[9]柯洋.柔性膜卷繞糾偏控制機理與算法研究[D].武漢:華中科技大學(xué),2017.
[10]喬海洋.火箭發(fā)動機殼體纏繞纖維帶智能糾偏控制系統(tǒng)設(shè)計[D].武漢:武漢理工大學(xué),2006.
[11]黃蒙.薄膜卷材糾偏控制系統(tǒng)設(shè)計與研究[D].武漢:武漢理工大學(xué),2013.
[12]成衛(wèi)雄.基于直流無刷電機的糾偏控制系統(tǒng)設(shè)計與實現(xiàn)[D].武漢:武漢理工大學(xué),2012.
[13]楊靜.鋰電池極片涂布設(shè)備控制系統(tǒng)設(shè)計[D].哈爾濱:哈爾濱工程大學(xué),2017.
[14]李士勇.模糊控制[M].哈爾濱:哈爾濱工業(yè)大學(xué)出版社,2011.
第一作者簡介:肖揚(1996-),男,碩士研究生,研究領(lǐng)域為自動控制。
※通訊作者簡介:侯增選(1964-),男,教授,博士生導(dǎo)師,研究領(lǐng)域為自動化纏繞成型工藝與裝備研制等。
(編輯:王智圣)
