具有防撞傷功能的安全漫步機設計分析
2021-08-19 03:52:04蔡如奕劉志豪夏鑫鄧曉龍尹學展
機械工程師 2021年8期
關鍵詞:設計
蔡如奕,劉志豪,夏鑫,鄧曉龍,尹學展
(河海大學,南京 213000)
0 引言
在我國很多社區和公園都配備了各式各樣的健身器材,但由于種種原因,健身器材造成的人身傷害層出不窮[1]。因此在設計和使用健身器材的時候,器材的安全性設計和保障就顯得尤其重要。邢申建[2]設計了一種帶有防護裝置的太空漫步機腳蹬板,包括腳蹬板、內護墊和外護墊等。這個設計能克服現有技術的不足,內外均設置防護措施,起到了保護自己和他人的目的。同樣的針對擺幅的大小控制,胡妃[3]設計出一種擺動幅度可調的健身用漫步機。利用阻擋部件在限位桿上的間距可調,使用者在使用時可根據自身身體狀況來限制對漫步機擺桿的擺動幅度,避免了無意中的拉傷,具有很好的實用性。李叔彥等[4]設計了三種保護方案,分別是后方卷柱防護、后方伸縮條防護和金屬塔桿防護。利用伸縮裝置圈出一塊安全地進行防護。
以上方案終究只是治標不治本的方法,無法保證使用者的使用安全。因為不規范的使用習慣,使用者從漫步機上下來時漫步機的腳蹬卻還在擺動,從而打到使用者腿的事件時有發生。根據現有收集資料,未找到能在使用者不使用漫步機時,腳蹬能快速停下防止撞傷人的一種保護措施。本項目針對漫步機打腿這一缺點,設計出一種實用性制動裝置,具有實用性和創新性,巧妙地使這個問題有了一定程度上的解決。
1 安全漫步機的工作原理
針對漫步機安全隱患,設計一款具有防撞傷功能的漫步機。該漫步機裝置包括五個方面,分別是基礎裝置、腳離停止裝置和手動緩停裝置、儲能裝置和報警裝置。
1)基礎裝置。基礎裝置在傳統裝置的基礎上增設了一個制動箱。制動箱采用可拆裝的方式,方便將頂蓋拆除檢查內部各零件的情況。
2)腳離停止裝置。當使用者站在腳瞪上時,壓力傳感器檢測到適當壓力,碟剎器松開碟剎片,漫步機正常工作,計時器開始計時。壓力達到一定數值時,漫步機才可以使用,從而避免兒童的誤用。當使用者從漫步機上下來時,壓力傳感器檢測不到適當壓力,碟剎器瞬間夾緊碟剎片,擺桿立即停止擺動,計時器停止計時。
3)手動緩停裝置。當使用者握緊手剎時,閘線帶動剎車片,在限位桿的限制下,剎車片向外翻轉,從而松開腳蹬的桿,漫步機正常工作。當使用者松開手剎時,剎車片在彈簧的推力下向內翻轉恢復至原來的位置,腳蹬在剎車片的擠壓下緩慢停下。
手剎的存在既可保證使用者使用姿勢的正確性。一旦使用者其中一只手沒有按住手剎,腳蹬就會緩慢停下。又可增加健身的效果,促進使用者小臂肌肉的鍛煉。
4)儲能裝置。超越離合器安裝在腳蹬的桿上,從而進行一個單向的傳遞,齒輪將力傳遞至減速器處,減速器反接從而提升轉速,再接至發電機進行發電,產生的電通過導線儲存到蓄電池內。為了環保考慮,裝置上的供電采用太陽能和漫步機擺動供電的雙重方式為蓄電池供電。
5)報警裝置。在漫步機的立柱側面安裝距離傳感器,當前后的隱患距離內出現行人時,觸發漫步機的抱閘裝置,鎖死漫步機的擺桿,避免撞傷行人。同時蜂鳴器響起,提醒使用者注意安全。
2 工作過程
當使用者站在腳蹬上時,壓力傳感器檢測到適當的壓力,碟剎器松開。當使用者雙手握緊剎車時,剎車片松開。計時器開始計時,使用者可以正常使用。發電機將使用者運動時產生的機械能一部分收集起來,存儲在蓄電池中。
當使用者松開手剎時,剎車片夾緊,腳蹬在剎車片夾緊的作用下緩慢停下。
當使用者腳離開腳蹬時,壓力傳感器檢測不到適當的壓力,碟剎器夾緊,計時器停止計時。
若使用者在使用過程中因使用不規范觸發了紅外線傳感器,紅外線傳感器收到信號后,蜂鳴器響起,提醒使用者注意。當紅外線傳感器檢測不到信號時,蜂鳴器關閉。
太陽能板吸收太陽能,將其轉化為電能儲存在蓄電池內,工作原理如圖2所示。
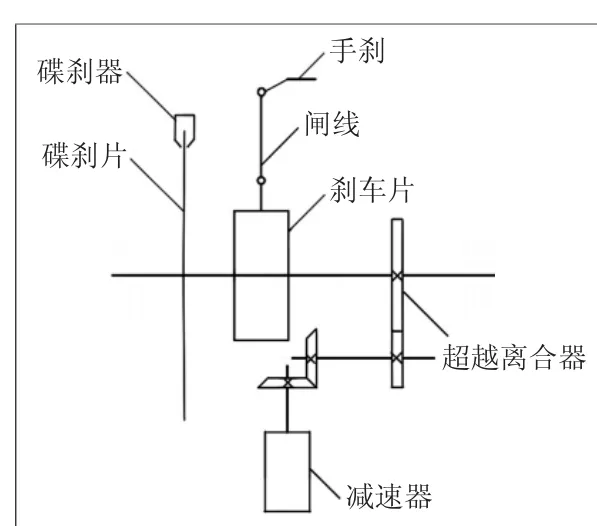
圖1 裝置原理圖
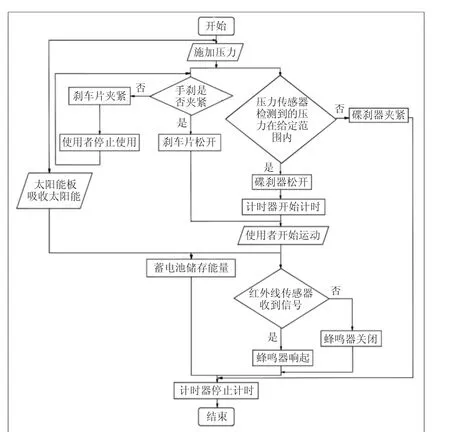
圖2 工作流程圖
3 漫步機的控制系統設計
本漫步機利用單片機來控制漫步機的速度幅度,采用壓力傳感器來檢測使用者的使用情況。如果出現意外情況,可以及時地停止漫步機的運動,以避免對使用者造成傷害,同時采用紅外傳感模塊來保護周圍人的安全,在外來者經過的時候能及時停止漫步機,從而避免對其造成傷害,如圖3所示。
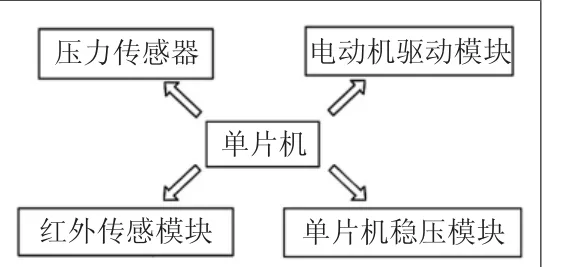
圖3 控制模塊
壓力傳感器用于監測使用者是否安全地站在腳踏板上,通過壓力控制確保非兒童觸發裝置,如圖4所示。
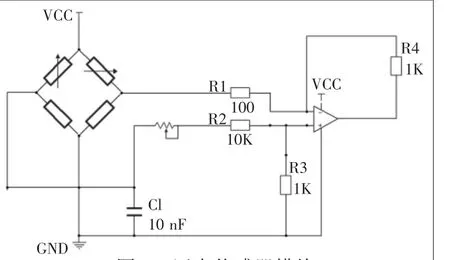
圖4 壓力傳感器模塊
紅外傳感模塊用于檢測周圍的突發情況,如行人經過則快速停止,使用者在使用過程中可以上下漫步機,如圖5所示。
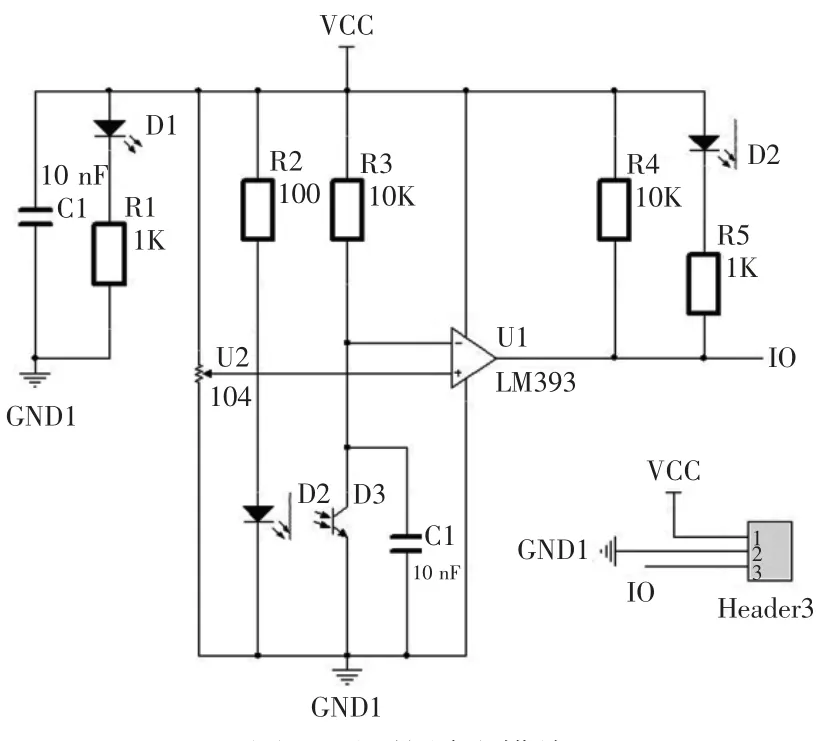
圖5 紅外循跡模塊
4 漫步機結構設計
1)力學計算。
考慮到特殊情況,暫且假設使用者的體重M=150 kg,身高H=180 cm。
由數據表明[5],人的重心位置約為總身高的56%。
設兩腳踏板中心之間的間距為D,人重心到踏板的距離為L,人重心到頭頂距離為N,人 重心到踏板所在平面的距離為M,如圖6所示。
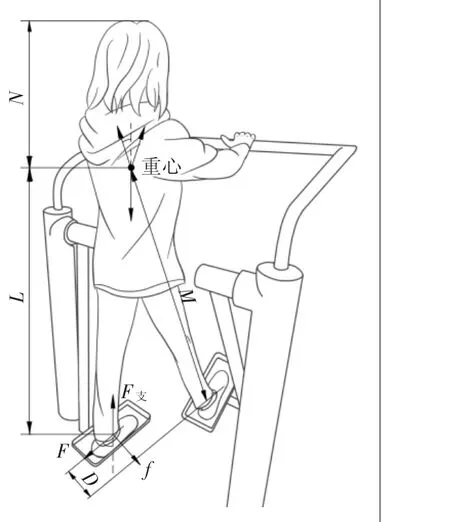
圖6 擺動受力示意圖


表1 計算結果
對重心位置受力分析和人的腳掌受力分析則有:

故可得出一個結論:踏板的壓力不會隨著擺動而發生變化,且只與人的重力有關。
將其假設為一個理想化模型,如圖7所示。
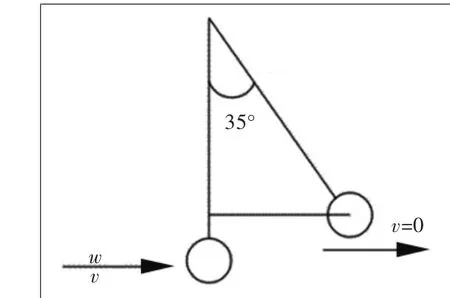
圖7 工作時漫步機的受力分析
在最低點人體給出一個w,使人從最低點運動到最高點,轉動的最大的角度為35°,即在最高處時α=35°,v=0 m/s。
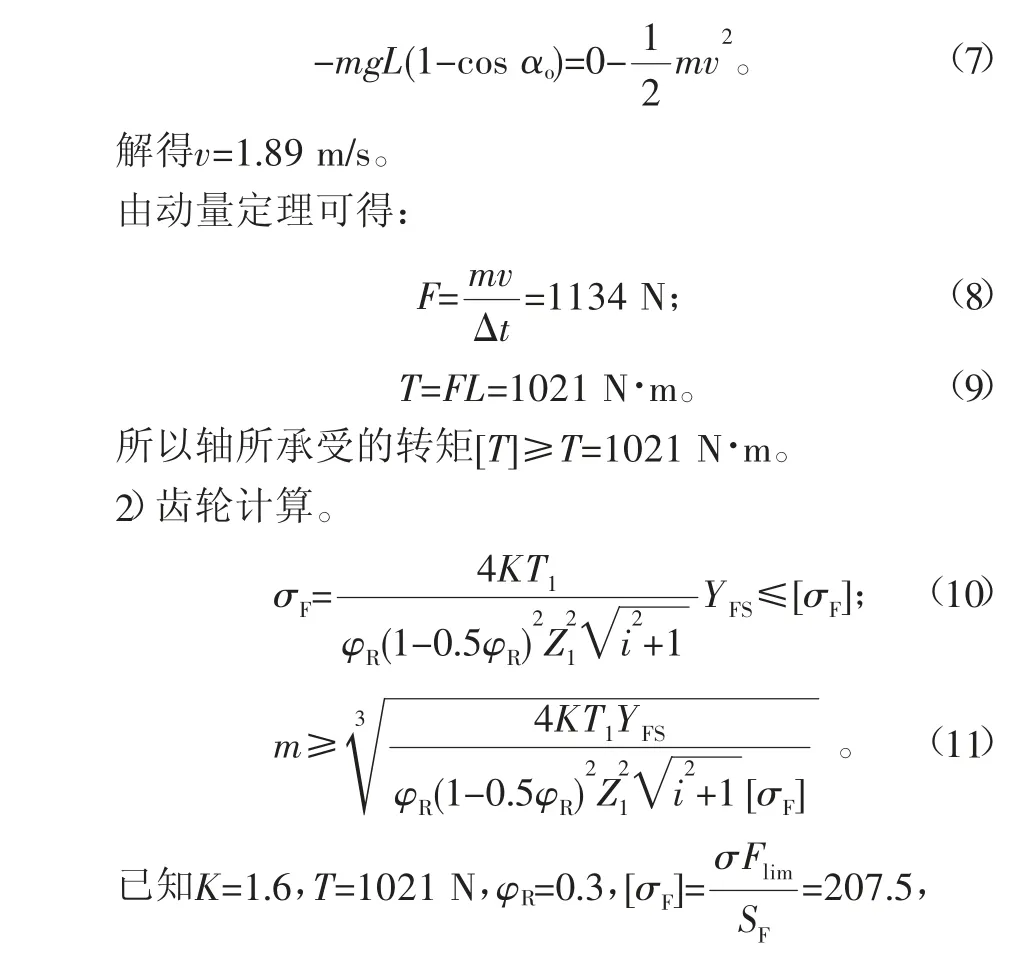
由動能定理可知:
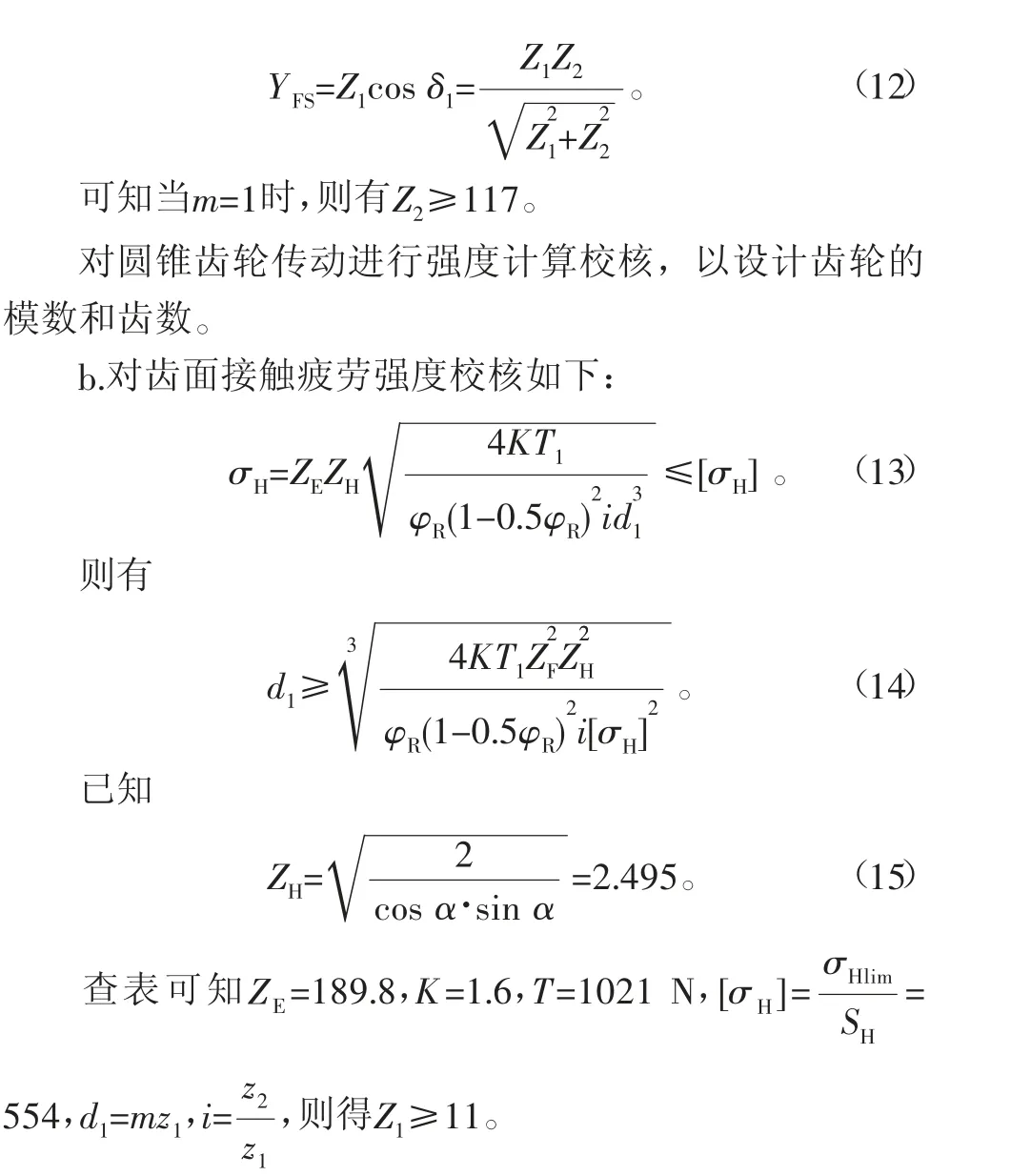
c. 綜上所述,當m=1時,可選擇Z1≥11、Z2≥117 的 直 齒錐齒輪。
當m=2時,可選擇Z1≥15、Z2≥31的直齒錐齒輪(如表2)。
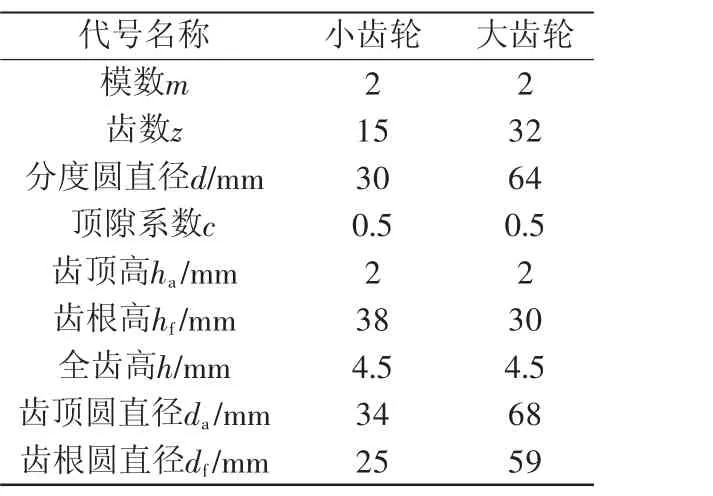
表2 齒輪參數總結
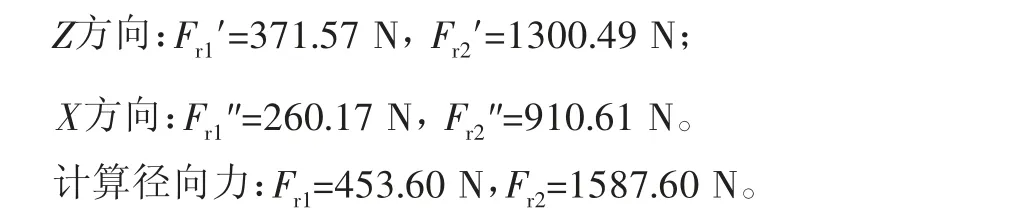
3)軸承計算。
經計算可得:
支承2 型號的確定:
a.面對面安裝在一個支點時,當量動載荷可按下式計算:當Fa/Fr≤0.68時,P=Fr+0.92Fa;當Fa/Fr>0.68時,P=0.67Fr+1.41Fa。

c.計算預期壽命。根據資料預測[6],器材的安全使用壽命應不小于8 a,最大預期壽命為每天使用5 h,每年使用天數為365 d,安全使用壽命為8 a,則Lh′=14600 h。
d. 計算轉速。經實際測算選取最高轉速為n=240 r/min。
e.計算該對軸承應具有的基本額定公載荷值:
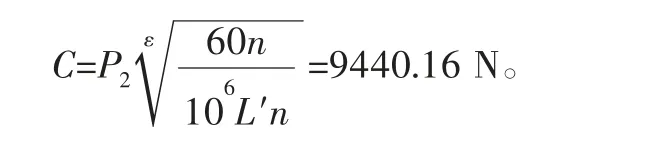
f.選擇軸承型號。查機械設計手冊,選擇7206AC型軸承。

同理可確定支承1型號選擇為6206型深溝球軸承。
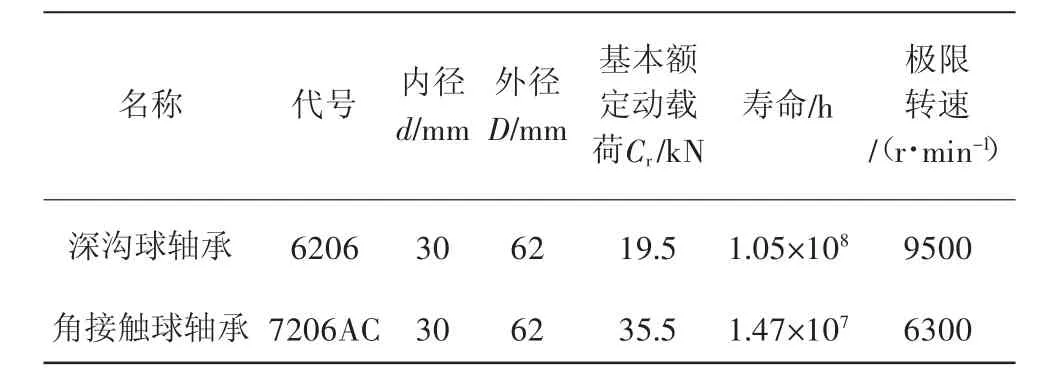
表3 軸承參數總結
5 結論
本文研究了一種能自動快速停止擺動的漫步機,腳動為第一層制動,需要腳蹬能夠在腳離開的時候立即停止擺動。對此,采用制動力較強且迅速的碟剎進行制動,確保使用者在停止使用時能立即制動。手動方面則是第二層保險,采用阻尼緩停,使腳蹬既能在短時間內快速停下來,使用者又不會失去平衡。當握緊手剎的時候,剎車片松開,腳蹬可以自由擺動,當松開的時候,剎車片夾住轉軸,腳蹬在短時間內停下。同時,手動裝置可以促使使用者兩手握住扶手,從而增加漫步機使用的安全性。考慮到絕大多數漫步機都露天放置在小區內,將漫步機設計成自供電的形式,節能環保,安全方便。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
