可控式墻式氧氣吸入器的設計
2021-08-19 03:51:56張振姚文欣張明強劉昊銘何謙
機械工程師 2021年8期
張振,姚文欣,張明強,劉昊銘,何謙
(湖南師范大學工程與設計學院,長沙 410081)
0 引言
隨著醫療技術的發展,集中供氧的方式已在全國醫院普及。目前,傳統形式的醫用浮標式氧氣吸入器被廣泛地應用于臨床。醫護人員需要根據醫囑通過旋轉旋鈕設置供氧濃度,并按時作出調整,記錄患者吸氧的起止時間。這大大增加了醫護人員的工作量,并且醫護人員由于工作繁忙常常會忘記患者的供氧進度,沒有及時調控。
目前,改進型氧氣吸入器主要有超聲波氧氣流量傳感計費器、光電控制智能化吸氧計時器等。超聲波氧氣流量傳感計費器通過超聲波氧氣流量傳感器進行檢測,自動感知氧氣流量并計時,同時借助液晶顯示屏顯示氧氣流量和吸氧時間[1]。光電控制智能化吸氧計時器利用光電技術探測氧氣流量計浮標的位置,可累加計時,操作簡便,計時準確[2]。但是這些新型氧氣吸入器只是記錄了供氧信息,并未實現對氧氣吸入器的自動控制[3-5]。為了解決上述問題,在傳統的墻式氧氣吸入器的基礎上進行改進,設計一種能夠通過人機交互自動完成供氧過程的可控式墻式氧氣吸入器。
1 可控式墻式氧氣吸入器的控制和性能指標
可控式墻式氧氣吸入器利用單片機的軟件控制功能,采用LCD液晶顯示屏顯示實時信息,利用矩陣按鍵作為數據輸入模塊建立起外界與單片機內部的聯系,利用步進電動機驅動板作為控制信號輸出模塊,步進電動機將電能轉化為機械能。該裝置能夠人為設定供氧濃度與供氧時長、實時顯示供氧狀態并在結束時自動響鈴。操作簡單,計量精確,能減少醫護人員工作量,改善治療效果。其性能指標為:輸入電壓為5.5~3.3 V、LCD顯示、氧氣流量為0~10 L/min、結束響鈴提醒、工作溫度范圍為-40~85℃,相對濕度<90%RH。
2 開發與實現
如圖1所示,可控式墻式氧氣吸入器是對現有的墻式氧氣吸入器進行改進,由墻式氧氣吸入器、聯軸器、步進電動機、控制部分、殼體組成。將墻式氧氣吸入器的旋鈕取下,把露出的芯軸通過聯軸器與步進電動機主軸連接,通過控制單元控制電動機的旋轉角度,實現對供氧濃度和供氧時長的自動控制。
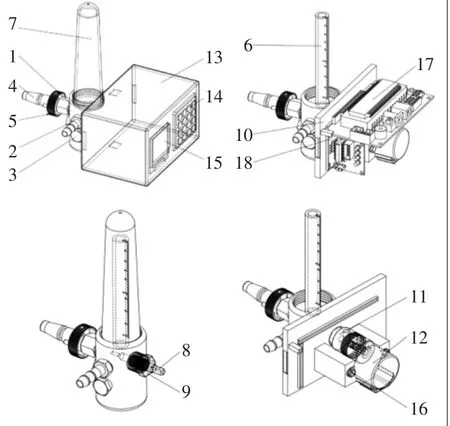
圖1 可控式墻式氧氣吸入器結構示意圖
2.1 硬件結構
墻式氧氣吸入器用于將供氧口處的氧氣輸送給病人。聯軸器將墻式氧氣吸入器中流量調節閥的芯軸與步進電動機主軸連接。步進電動機利用脈沖信號通過聯軸器控制流量調節閥門開口大小,進而控制供氧濃度。殼體用于固定和支撐裝置各個部件,保護內部電動機和控制單元不被損壞。
1)墻式氧氣吸入器。現有的墻式氧氣吸入器包括閥體、流量計、進氣口、出氣口、流量調節閥、安全閥等。供氧流量和濃度通過醫護人員扭動旋鈕調節閥口大小實現。先將墻式氧氣吸入器的旋鈕取下,把露出的芯軸通過聯軸器與步進電動機主軸連接。
2)殼體。殼體分為后支撐殼體和前蓋兩部分,后支撐殼體中間的圓孔與調節閥螺母外螺紋處契合,同時靠近吸入器的一面向外延伸出與閥體直徑相同的弧線形狀的兩邊支撐腳與閥體外側貼合,且圓孔直徑在軸線方向上呈階梯式,在階梯交界處形成圓環面抵在螺母頭部,此結構能夠讓殼體固定在裝置上而不發生旋轉和脫落,前蓋為無蓋的長方體形狀的薄壁件,并在前面開有2個矩形通孔,以便于安置按鍵外套和顯示屏。
3)步進電動機。步進電動機選用28BYJ-48四相五線步進電動機,其動力強、體型小巧、質量較輕,并且直徑與氧氣吸入器流量調節閥的軸直徑大小相同,可以用統一直徑的彈性聯軸器進行聯結,該聯軸器同樣較為輕巧,并且能夠傳遞較大轉矩。
2.2 控制系統
控制單元,包括單片機模塊、步進電動機驅動板、LCD液晶顯示屏、按鍵等。控制單元接收從按鍵傳來的輸入信號,運行程序輸出相應的控制信號,控制步進電動機旋轉對應的角度。如圖2所示,主控電路主要包括單片機電路、步進電動機驅動電路、按鍵電路、蜂鳴器電路和顯示電路。

圖2 電路圖
1)單片機模塊。單片機模塊選用89C52單片機,其存儲空間和數據處理速度足夠,并且編程簡單方便、體積小巧靈活。單片機作為主控電路的核心,接收按鍵的輸入信號并利用程序進行計算處理,將得到的輸出數據利用步進電動機驅動板對外控制步進電動機。
2)步進電動機驅動模塊。驅動模塊選用ULN2003驅動板,其具有電流增益高、工作電壓高、溫度范圍寬、帶負載能力強等特點。根據單片機的輸出信號向步進電動機發射一定量的脈沖信號,控制步進電動機轉過相應的角度。
3)液晶顯示模塊。LCD液晶顯示屏選用LCD12864液晶顯示屏,因為它電壓低、功耗低、價格低,適合本裝置使用。顯示屏實時顯示數據設定信息與供氧狀態信息,方便醫護人員設定供氧數據、觀察供氧情況和隨時作出調整。
4)按鍵模塊。按鍵選用4×4矩陣按鍵,穩定性高,靈敏精確。按鍵作為建立外界與內部之間聯系的模塊,選用3個按鍵作為LCD上時常顯示的功能按鍵,選用10個按鍵作為代表0~9共10個數字輸入的數字按鍵。
3 軟件設計
調查顯示,對于普通病人的供氧,一般供給固定的低濃度氧氣;而對于血氧濃度低于90%的病人則需要先供給較高濃度的氧氣一段時間后再供給低濃度的氧氣。所以,本裝置設有單時段供氧與雙時段供氧2種供氧模式。
圖3所示為本裝置工作程序圖,主程序包括按鍵讀取程序、液晶顯示程序、電動機控制驅動程序、定時中斷程序等。
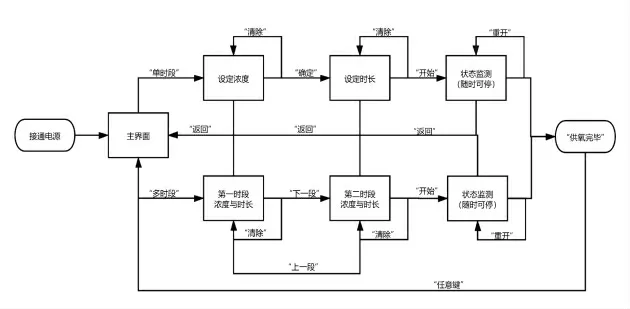
圖3 控制流程圖
具體操作方法和工作狀態介紹如下:裝置通電后自動開機,選擇“單時段”或“多時段”的供氧模式,設置好每個時段供氧濃度與時長后,按下“開始”按鍵,步進電動機轉過設定濃度對應角度調節閥門開口大小,進行自動供氧,在完成供氧后屏幕顯示“供氧完畢”狀態,同時蜂鳴器響鈴提示供氧完成,此時按下任意鍵返回首界面。
在設定數據時,可隨時返回首界面或清除當前設定數據;在供氧時,可隨時停止或重新開始供氧。由于在實際應用中流量與時間精度要求并不高,一般為整數,所以本裝置所設計的輸入數據單位精確到小數點后一位,滿足實際應用要求。
4 輸入輸出關系計算
由于本裝置是通過人機交互實現自動供氧過程的,所以需要求出醫護人員的手動輸入量與吸入器自動輸出量之間的數學關系,即顯示屏輸入的供氧濃度與步進電動機帶動調節閥芯軸轉動相應角度的關系。
如圖4所示,已知調節閥芯軸端部為一個大端直徑為2 mm、錐度為∠1∶15的細長圓臺,芯軸通過螺距p=0.5 mm的螺紋連接與固定在閥體上的螺母配合,通過旋轉芯軸利用螺紋配合將旋轉運動轉換為直線運動,推動芯軸圓臺部分在閥體內一直徑為2 mm、長度為6 mm的圓柱形孔內來回移動控制圓臺面與圓柱形孔面相互配合在軸線方向上投影形成的圓環面積,即控制開口面積。
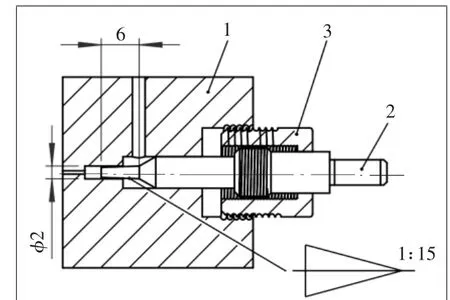
圖4 調節閥螺母、芯軸與閥體配合截面示意圖
當芯軸通過旋轉在軸線方向上移動了一段距離時,圓環面積計算式為:
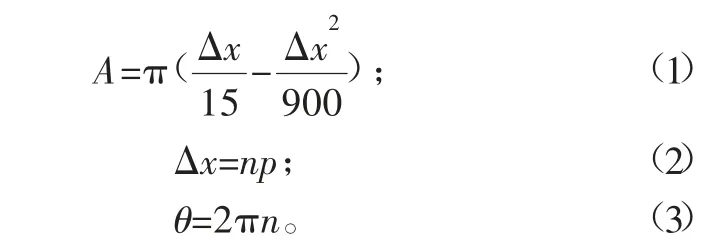
式中:A為軸線方向上投影形成的圓環面積,mm2;Δx為圓臺底面與圓柱形孔端面之間的距離,mm;n為芯軸轉過的圈數;p為芯軸與螺母配合螺紋的螺距,取p=0.5 mm;θ為芯軸轉過的角度,rad。
將式(2)、式(3)代入式(1)得
式中:P1為吸入器輸入氣體壓強;v1為輸入氣體流速;P2為輸出氣體壓強;v2為輸出氣體流速;ρ為氣體密度;g為重力加速度;h為氣體與水平地面高度。
將式(5)整理得

其中:接于病房中心供氧終端使用的墻式吸入器的輸入端的工作壓力P1=0.4 MPa;輸出端工作壓力范圍為0.20~0.30 MPa,取P2=0.3 MPa;v1可由儀器測得;ρ可通過查閱相關資料[6]得到。
對于最常用的雙孔型鼻氧管,病人所需氧氣濃度的計算公式為:
根據式(4)、式(6)、式(9)與四相五線步進電動機性質可得步進電動機所需脈沖數與供氧濃度之間的關系。在編寫程序時根據上述關系建立以供氧濃度為自變量、脈沖數為因變量的關系式,實現供氧濃度的精確控制。
5 結論
氧氣對于患者的臨床醫療發揮著重要的作用。能否在治療過程中精確穩定地供氧、對供氧狀態進行實時監控,對治療效果有著重要意義。該裝置具有如下特點:1)通過人機交互實現不同時段、不同濃度的全自動供氧,操作方便,減輕醫護人員的勞動量;2)能夠提供最常用的雙孔型鼻氧管供氧服務,涵蓋了大部分的吸氧患者,普適性好,易于推廣;3)在原有基礎上增設控制模塊,拆裝方便,結構原件、電子器件簡單。
經過實際應用,認為本裝置設計合理、計量準確、操作簡單、成本低,將會在臨床應用中有很好的發展。
猜你喜歡
儀器儀表用戶(2022年11期)2022-11-03 12:38:58
儀器儀表用戶(2022年10期)2022-09-29 04:36:58
儀器儀表用戶(2022年9期)2022-08-30 05:39:48
儀器儀表用戶(2022年5期)2022-05-06 09:02:30
儀器儀表用戶(2022年4期)2022-04-01 03:17:02
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
石油化工自動化(2018年5期)2018-11-14 02:34:26
電子制作(2018年12期)2018-08-01 00:48:04
