煤礦井掘進工作面移動設備人員接近監(jiān)測系統(tǒng)分析
2021-08-16 05:02:04曹豪
中國新通信 2021年11期
曹豪
【摘要】? ? 煤礦井掘進過程中涉及諸多設備,包括連采機、梭力、錨桿機等,在應用中也呈現(xiàn)出復雜性。并且煤礦井掘進工作面環(huán)境復雜,條件惡劣,在操作中具有極大的工作盲區(qū),如果稍有不慎勢必發(fā)生嚴重安全事故。據(jù)此,應用移動設備人員接近監(jiān)測系統(tǒng),將借助技術優(yōu)勢規(guī)避安全風險,通過系統(tǒng)探測達到安全控制的目的。該監(jiān)測系統(tǒng)主要基于超寬帶技術,將機載部分設置于移動設備機身,并設置一定的距離控制參數(shù),規(guī)劃為安全區(qū)域、報警區(qū)域、停機區(qū)域等,以實現(xiàn)具體的結構劃分。在人員控制上則將終端部分集成于礦燈之上,通過位置感知探測技術,從而完成相應的控制操作,確保井下工作人員的安全。
【關鍵詞】? ? 煤礦井掘進工作面? ? 移動設備? ? 人員接近監(jiān)測系統(tǒng)
引言:
縱觀現(xiàn)代信息技術的快速發(fā)展,為保障煤礦開采等高危行業(yè)的作業(yè)安全,越來越多的新興技術被開發(fā)應用。尤其是面對掘進工作面復雜的條件和工況,更需要依賴于全新的安全防護技術。目前,主要應用超寬帶技術對井下作業(yè)人員進行定位,立足于進上綜合控制與井下終端布局,構成全面覆蓋的安全防護網(wǎng)絡,利用信息通訊與信號控制,實現(xiàn)對移動設備的自動化感應啟停。
一、人員接近監(jiān)測系統(tǒng)構成及原理
1.1 系統(tǒng)構成
為適應煤礦井掘進工作面的需求,在大量的移動設備運行過程中,人員接近系統(tǒng)發(fā)揮著重要的作用。系統(tǒng)主要由機械部分及人員終端部分所構成,兩種設備之間的銜接依賴電磁波實現(xiàn)通信與定位。機載部分供電以127 V交流電或24 V直流電為主,其中又包含眾多的探測器、主控器、顯示終端及報警器等,各設備之間利用通信電纜進行連接。其中的主控器與電控箱連接,并發(fā)揮取電及停機控制功能,人員終端供電則由充電鋰電池組成。
1.2 系統(tǒng)工作原理
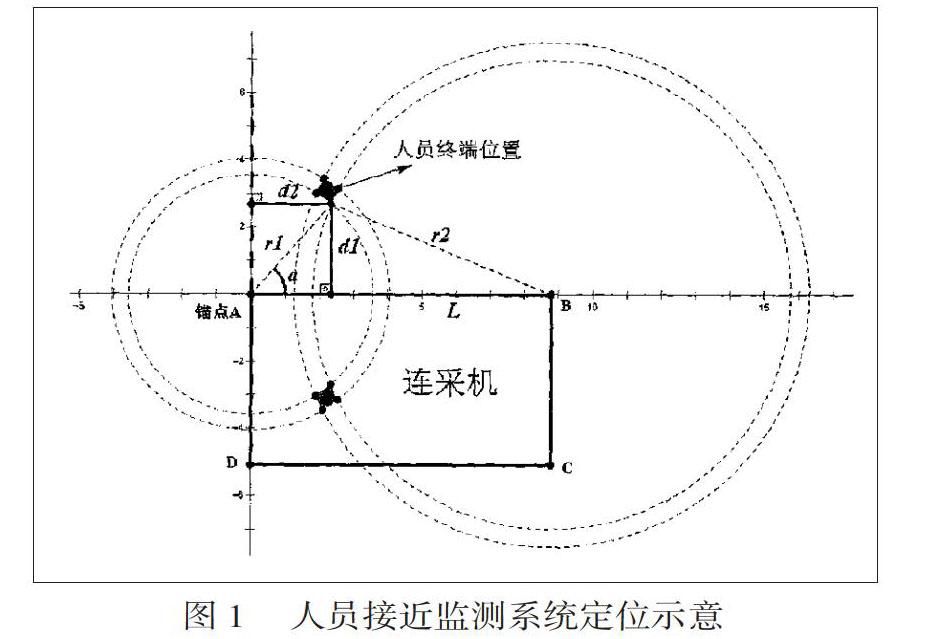
針對煤礦井掘進工作面安全控制要求,該系統(tǒng)主要應用于各類移動設備中。其工作原理主要為,通過控制系統(tǒng)設置相應的參數(shù),將危險系數(shù)進行分級處理,即安全區(qū)域、報警區(qū)域、停機區(qū)域等,在各區(qū)域所覆蓋的范圍內,人員位置由便攜式頭燈進行信息交互,兩種設備之間通過電磁波進行通信,主要是利用電磁波發(fā)射至接收時間,以及光速的乘積精確計算距離,并利用系統(tǒng)軟件對所收集的信息進行處理,從而最終確定人員終端的位置,以此獲得相應的管理坐標(如圖1)。一旦當人員移動至所區(qū)分的區(qū)域內時,將觸發(fā)相應的控制功能,以提醒人員注意安全,如果進入兇險區(qū)域時,則系統(tǒng)將自動控制斷電,使設備停止作業(yè)以防止人員受傷。
二、人員接近監(jiān)測系統(tǒng)應用方案
2.1 連采機應用方案
1.區(qū)域劃分。在實際的系統(tǒng)布設中,應重點依據(jù)井下掘進作業(yè)面的現(xiàn)場條件,對各個區(qū)域進行科學細致劃分,以確保監(jiān)測系統(tǒng)作用區(qū)域的有效性,達到全面覆蓋的要求。
2.設備布置與連線。依據(jù)井下掘進作業(yè)面的劃分,合理設置各設備位置,確保在作業(yè)區(qū)域內無盲區(qū)、全覆蓋,并使設備處于長期安全運行狀態(tài)。針對各個設備位置的安裝,應契合其功能特點,如顯示終端應安裝于駕駛室,控制器則應安裝于平臺下方,以避免外部對設備的影響和破壞,并且能夠實現(xiàn)全域的有效覆蓋。
3.供電與邏輯控制。基于實地考察分析的情況下,對設備的各單元進行測試,對連采機接近監(jiān)測系統(tǒng)的邏輯單元、供電單元等進行配置和測試。1)取電電氣連接,127v交流電瓦斯斷電儀;2)停機電氣連接,設置瓦斯斷電儀啟動回路;3)停機邏輯控制,監(jiān)測系統(tǒng)在煤礦井下掘進工作面應用中,停機邏輯屬于重要控制節(jié)點,系統(tǒng)一旦監(jiān)測危險區(qū)域或者非設備操作人員處于制作危險區(qū)域時,系統(tǒng)將實施監(jiān)測預警,控制器將啟動設備回路,從而實現(xiàn)設備的控制;4)語音報警器控制,當操作區(qū)域無需報警時,系統(tǒng)的監(jiān)測控制處于斷開狀態(tài),若制作區(qū)域需要報警時,系統(tǒng)監(jiān)測控制器開關處于閉合狀態(tài),語音報警器將播放“設備運轉、請勿靠近”的語音提示。
2.2 梭車應用方案
1.區(qū)域劃分。根據(jù)煤礦井掘進工作面移動設備的特點,針對梭車操作的具體要求確定區(qū)域劃分狀態(tài),從而滿足安全操作的要求。
2.設備布置與連線。監(jiān)測系統(tǒng)應用于梭車設備時,需要將無線探測信號進行劃分,并遵循信號全覆蓋、設備不易受損、探測無盲區(qū)等原則。1)設備安裝位置,其顯示部分應安裝于駕駛室內,外部探測設備則應安裝在具有一定保護功能的區(qū)域,確保在設備移動運行中不受影響,同時能夠有效的發(fā)射和回饋信號;2)設備連接,主要由車載通信電纜進行信號交互,對于裸露的線路應實施保護,避免在運行中受損,保證監(jiān)測系統(tǒng)應用的有效性。
2.3 錨桿機應用方案
1.區(qū)域劃分。在監(jiān)測系統(tǒng)的應用中,需要綜合考慮錨桿機的工況和特點,應基于現(xiàn)場情況實施監(jiān)測系統(tǒng)的區(qū)域劃分,以保障系統(tǒng)的有效應用。
2.設備布置與連線。監(jiān)測系統(tǒng)在錨桿機的應用中,同樣遵循信號的全覆蓋、保障設備安全及監(jiān)測無盲區(qū)原則,系統(tǒng)的顯示終端應安裝于操作臺,系統(tǒng)控制器安裝于顯示設備下部,以確保設備在能夠安全有效,避免在運行及撞擊中失效,影響設備的功能。設備連線是以車載設備為基礎,利用礦用通信電纜進行設備連接,并對相關線路進行保護。
3.供電邏輯控制。結合錨桿機作業(yè)的實際特點,在供電邏輯控制方面應做好三個方面。1)取電電器連接,應用127v瓦斯斷電儀;2)停機電氣連接,啟用瓦斯斷電儀回路;③停機邏輯控制,在監(jiān)測系統(tǒng)應用中,如操作區(qū)域存在異常人員移動時,控制器將對周邊探測結果進行分析,即探測到錨桿機周邊存在移動信號,將認定為存在人員危險風險,控制器將啟動設備回路,控制設備將立即采取斷電停機方式,以保證安全。
4.語音報警控制。當操作區(qū)域無需報警時,系統(tǒng)的監(jiān)測控制處于斷開狀態(tài),若制作區(qū)域需要報警時,系統(tǒng)監(jiān)測控制器開關處于閉合狀態(tài),語音報警器將播放“設備運轉、請勿靠近”的語音提示。另外,錨桿機在移動運行過程中,將自動發(fā)出“嘀,錨桿機倒車,請工作人員注意” 的語音提示,相關人員也應依據(jù)提示的內容,判斷設備的工作狀態(tài),以避免靠近而導致探測系統(tǒng)報警或停機。
三、不同移動設備與人員接近監(jiān)測系統(tǒng)的關聯(lián)
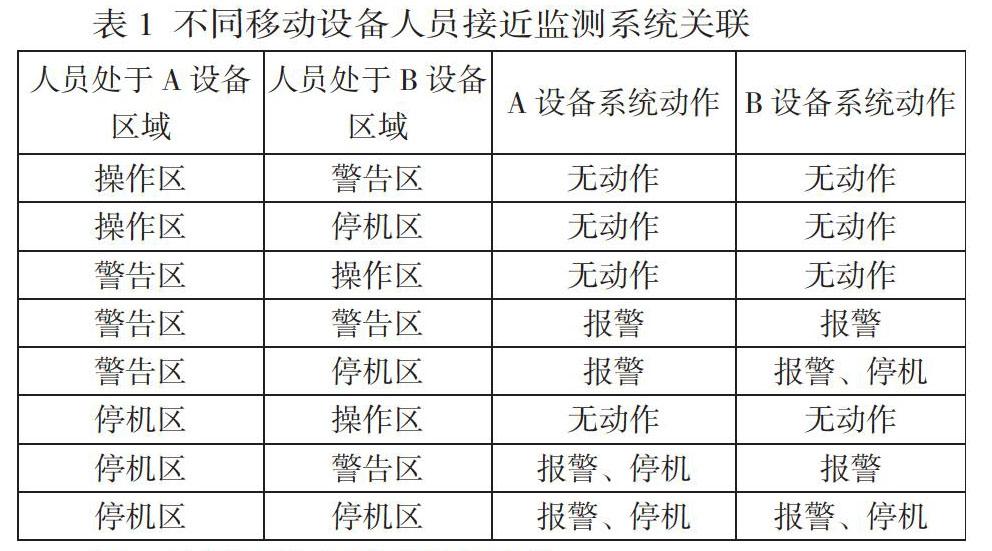
人員接近監(jiān)測系統(tǒng)的目標在于保證作業(yè)安全,而其所涉及的設備也存在較大差異,并通過不同設備的應用構成系統(tǒng)結構。因此,在不同移動設備與人員接近監(jiān)測中,也應遵循相應的邏輯控制關系,如人員接近不同設備同時覆蓋的區(qū)域時,系統(tǒng)應具備一定的判斷能力,對正常作業(yè)與非正常作業(yè)進行細分,避免操作設備臨近時導致的停機,而影響正常生產(chǎn)效率。比如,當梭車接近連采機進行煤時,連采機司機將處于梭車所規(guī)定的停機區(qū)域,而相應的梭車司機則也處于連采機的停機區(qū)域。此時的兩種設備應進行信息的交互,傳遞和識別相關人員的信息,通過不同設備之間的識別,避免兩種設備受到影響。根據(jù)上述控制特點,若將設備設置為A設備和B設備,兩種人員接近系統(tǒng)的邏輯關系如表1所示。
四、監(jiān)測系統(tǒng)參數(shù)配置的設計
監(jiān)測系統(tǒng)設計屬于頂層結構,針對用戶的需求可進行參數(shù)的配置或者系統(tǒng)操作。在人員接近監(jiān)測系統(tǒng)中,可在顯示界面使用“功能選擇”欄中的“參數(shù)配置”圖標,選擇數(shù)字“1”按鍵,用戶根據(jù)提示輸入登錄密碼(初始密碼),隨后按F1鍵取得配置權限并進入控制界面。
1.顯示器參數(shù)配置。依據(jù)參數(shù)配置的要求,選擇“本機配置”功能菜單,通過對應圖標兩側所顯示的數(shù)字按鍵,以進入相應的參數(shù)配置菜單。用戶按照需要對新IP值進行配置,并按F1鍵進行切換,以及選擇F2鍵確認。在“本機網(wǎng)關”及“子網(wǎng)掩碼”的配置中,按照同樣的步驟操作。
2.機型配置。在“參數(shù)配置”中選擇“6”進入界面選擇,顯示終端將顯示對內在指定路徑下設備信息文化進行自動掃描,并將其結果添加至本界面。在F2鍵操作中顯示出提示對話框,以提醒用戶是否進行修改,在配置完成后再按F1進行確認,同時控制信息將經(jīng)過后臺發(fā)送到主數(shù)據(jù)控制器,此后系統(tǒng)將依據(jù)配置進行執(zhí)行操作。
3.主控制器配置。在“參數(shù)配置”界面選擇“2”,在主控制器界面進行聯(lián)機,對各項參數(shù)進行分析顯示和配置。若需要對各項配置等進行修改,則用F1鍵進行相應的切換,但包括MAC地址、當前日期、當前時間在內的信息不可修改。而按F2則為確認修改,通過界面設備參數(shù)的調整,以使主控制器按照配置執(zhí)行。
4. 探測器配置。探測器的配置與系統(tǒng)的效果影響顯著,因此在參數(shù)的配置中必須依據(jù)科學原則,在參數(shù)修改中按F2進入修改界面,F(xiàn)1用于選擇選擇和確認,以完成配置操作。
五、結束語
綜上所述,基于超寬帶信號測距技術的應用,為煤礦井掘進工作面人員接近監(jiān)測提供了重要支撐。該系統(tǒng)具有較大的應用價值,具備反應靈敏、可行性高、功能強大、操作便捷等特點,能夠適應復雜的煤礦井掘進工作面環(huán)境,通過利用礦燈雙天線、錨點雙收發(fā)器、多錨點多算法定位等創(chuàng)新技術,結合模塊化設計優(yōu)勢,為井下安全提供了可靠保證。
參? 考? 文? 獻
[1]關丙火.礦井掘進工作面移動設備人員接近監(jiān)測系統(tǒng)設計與分析[J].建筑工程技術與設計,2018(2):296-297.
[2]田彥榮,劉懷江,蔣棟,等.單巷長距離綜掘工作面供電系統(tǒng)布置優(yōu)化升級[J].內蒙古煤炭經(jīng)濟,2020(5):23,25.
[3]汪杰,王春華,李曉華.基于云平臺的煤礦設備狀態(tài)監(jiān)測系統(tǒng)設計[J].煤礦機械,2020,41(11):162-165.
