掘進(jìn)工作面圍巖穩(wěn)定性分析及快速成巷技術(shù)途徑
2021-08-16 06:23:58康紅普姜鵬飛高富強(qiáng)王子越楊建威
煤炭學(xué)報(bào) 2021年7期
康紅普,姜鵬飛,高富強(qiáng),王子越,劉 暢,楊建威
(1.中煤科工開(kāi)采研究院有限公司,北京 100013; 2.煤炭科學(xué)研究總院 開(kāi)采研究分院,北京 100013; 3.煤炭資源高效開(kāi)采與潔凈利用國(guó)家重點(diǎn)實(shí)驗(yàn)室,北京 100013)
巷道掘進(jìn)與支護(hù)是井工開(kāi)采的關(guān)鍵技術(shù)之一,是保證煤礦安全、快速、高效建設(shè)與生產(chǎn)的必要基礎(chǔ)。我國(guó)井工煤礦每年新掘進(jìn)的巷道總長(zhǎng)度超過(guò)12 000 km,其中煤、半煤巖巷道占比80%以上,是我國(guó)規(guī)模最大的地下工程。巷道掘進(jìn)速度、效率、成本顯著影響礦井的產(chǎn)量與效益。
與非煤礦山巷道、交通隧道等相比,煤礦巷道處于煤系沉積巖地層中,不僅圍巖強(qiáng)度低,而且多數(shù)圍巖結(jié)構(gòu)面發(fā)育、穩(wěn)定性較差[1]。同時(shí),隨著煤礦開(kāi)采深度不斷增加,高應(yīng)力巷道越來(lái)越多;隨著大型采掘設(shè)備的廣泛采用及通風(fēng)的要求,巷道斷面越來(lái)越大;隨著采煤工作面推進(jìn)速度和產(chǎn)量的不斷提高,采掘接續(xù)緊張的局面日益突出,要求在保證巷道安全與支護(hù)效果的條件下,顯著提高巷道掘進(jìn)速度;另外,為降低煤炭生產(chǎn)成本、提高礦井效益,巷道掘進(jìn)與支護(hù)成本不能過(guò)高。所有這些因素給巷道掘進(jìn)與支護(hù)提出更高的要求。
掘進(jìn)包括割煤、運(yùn)輸、支護(hù)(臨時(shí)支護(hù)、永久支護(hù))、通風(fēng)、降塵等多個(gè)工序,每個(gè)工序及各工序之間的相互協(xié)同均影響成巷速度。我國(guó)煤巷掘進(jìn)技術(shù)、裝備及機(jī)械化水平明顯落后于采煤技術(shù)與裝備。目前,全國(guó)綜掘工作面平均月進(jìn)尺不到200 m,掘進(jìn)隊(duì)與綜采隊(duì)平均配比為3.1∶1,采掘比例嚴(yán)重失衡[2-3]。
我國(guó)煤礦巷道掘進(jìn)工藝經(jīng)歷了人工、鉆爆法、綜合機(jī)械化掘進(jìn)的發(fā)展過(guò)程。目前,煤巷普遍采用綜合機(jī)械化掘進(jìn),掘進(jìn)設(shè)備主要有3種類型:懸臂式掘進(jìn)機(jī),連續(xù)采煤機(jī)及掘錨一體化機(jī)組[4]。前2者掘進(jìn)與支護(hù)分離,需配套單體錨桿鉆機(jī)、錨桿鉆車等支護(hù)施工設(shè)備,而掘錨機(jī)組將割煤、運(yùn)輸、臨時(shí)支護(hù)、永久支護(hù)設(shè)計(jì)為有機(jī)的整體,有利于實(shí)現(xiàn)掘支平行作業(yè)。錨桿、錨索支護(hù)是我國(guó)煤礦巷道的主體支護(hù)方式,已根據(jù)我國(guó)煤礦巷道地質(zhì)與生產(chǎn)條件,開(kāi)發(fā)出錨桿支護(hù)成套技術(shù),廣泛應(yīng)用于不同類型的巷道,取得良好的技術(shù)經(jīng)濟(jì)效益[5-7]。但仍然存在支護(hù)工序復(fù)雜、支護(hù)密度偏大、支護(hù)速度慢、用人多、效率低等問(wèn)題急需解決。
影響巷道掘進(jìn)速度的因素眾多,包括煤巖體地質(zhì)條件、生產(chǎn)條件、掘進(jìn)與支護(hù)工藝、裝備等。地質(zhì)條件是首要的因素,往往決定著掘進(jìn)工藝與裝備的選擇。掘進(jìn)前應(yīng)進(jìn)行全面、系統(tǒng)的煤巖體強(qiáng)度、結(jié)構(gòu)及地應(yīng)力等地質(zhì)力學(xué)參數(shù)測(cè)試[8],進(jìn)而研究掘進(jìn)工作面周圍應(yīng)力場(chǎng)、位移場(chǎng)分布特征,分析圍巖穩(wěn)定性[9],為掘進(jìn)工藝與裝備、支護(hù)形式與參數(shù)選擇提供基礎(chǔ)。在這方面,孫曉明等[10]采用數(shù)值計(jì)算方法,模擬了巷道分步開(kāi)挖及隨后的錨網(wǎng)支護(hù),研究了巷道圍巖變形與至掘進(jìn)工作面距離的關(guān)系。常聚才等[11]對(duì)比分析了巷道開(kāi)挖前后圍巖應(yīng)力、位移場(chǎng)變化特征及破壞規(guī)律。肖紅飛等[12]模擬計(jì)算了掘進(jìn)過(guò)程中工作面內(nèi)部和兩幫應(yīng)力集中和動(dòng)態(tài)變化,為煤巖變形破裂電磁輻射信號(hào)與應(yīng)力的耦合計(jì)算提供基礎(chǔ)。
巷道掘進(jìn)生產(chǎn)條件包括巷道斷面形狀與尺寸,巷道掘進(jìn)方向及與地應(yīng)力場(chǎng)的關(guān)系,護(hù)巷煤柱尺寸,巷道與鄰近其他巷道、采煤工作面、采空區(qū)的時(shí)空關(guān)系等。掘進(jìn)與支護(hù)工藝中,截割方式分為部分截割和全斷面一次截割;臨時(shí)支護(hù)分為前探梁、單體支柱、專門的臨時(shí)支架及掘進(jìn)機(jī)載臨時(shí)支護(hù)等多種形式;支護(hù)順序分為全斷面一次支護(hù)和分次支護(hù)(包括錨桿先打,錨索滯后;頂板錨桿先打,幫錨桿滯后;部分頂、幫錨桿先打,其余錨桿滯后等)。所有上述因素均對(duì)掘進(jìn)速度產(chǎn)生影響。其中,尤以錨桿、錨索支護(hù)占用時(shí)間長(zhǎng)(60%左右)、用人多(60%以上),導(dǎo)致掘進(jìn)效率比較低[13]。
掘進(jìn)與支護(hù)裝備是決定掘進(jìn)速度的關(guān)鍵。根據(jù)巷道地質(zhì)與生產(chǎn)條件,選擇合理的掘進(jìn)工藝,配套適應(yīng)的掘進(jìn)與支護(hù)裝備是實(shí)現(xiàn)快速掘進(jìn)的必要前提。圖1是我國(guó)煤礦巷道現(xiàn)有的掘進(jìn)工藝與裝備。“懸臂式掘進(jìn)機(jī)+單體錨桿鉆機(jī)”是目前我國(guó)煤礦主要的掘進(jìn)工藝,占比90%以上。當(dāng)圍巖比較破碎時(shí)需要“掘一排、錨一排”。煤巷單面掘進(jìn)速度多數(shù)為200~500 m/月,少數(shù)可達(dá)到500 m/月以上。該工藝掘進(jìn)與支護(hù)反復(fù)換位、相互干擾;缺乏有效的臨時(shí)支護(hù);錨桿施工靠人工,勞動(dòng)量大、效率低、占用時(shí)間長(zhǎng);掘進(jìn)與支護(hù)配套性差,不能實(shí)現(xiàn)平行作業(yè)。為了解決臨時(shí)支護(hù)、人工打錨桿問(wèn)題,開(kāi)發(fā)了“懸臂式掘進(jìn)機(jī)+臨時(shí)支架+錨桿臺(tái)車”工藝,臨時(shí)支架交替移架,節(jié)省了掘進(jìn)機(jī)與打錨桿的換位時(shí)間,但增加了臨時(shí)支架移架的時(shí)間,導(dǎo)致掘進(jìn)循環(huán)用時(shí)變化不大。另一種方法是“懸臂式掘進(jìn)機(jī)+機(jī)載臨時(shí)支架+機(jī)載錨桿鉆機(jī)”工藝,在懸臂式掘進(jìn)機(jī)上設(shè)置臨時(shí)支架和1~2臺(tái)錨桿鉆機(jī),完成掘進(jìn)、臨時(shí)支護(hù)及打錨桿作業(yè)。在地質(zhì)條件好、圍巖穩(wěn)定的多巷布置情況下,掘進(jìn)可采用“連續(xù)采煤機(jī)+錨桿臺(tái)車”工藝。神東礦區(qū)采用該工藝,煤巷平均進(jìn)尺達(dá)到2 000 m/月,并創(chuàng)造了多項(xiàng)全國(guó)紀(jì)錄[4]。掘錨聯(lián)合機(jī)組是適用于單巷掘進(jìn)的先進(jìn)掘進(jìn)工藝,具有全斷面一次截割、機(jī)載臨時(shí)支護(hù)、掘錨平行、連續(xù)運(yùn)輸?shù)忍攸c(diǎn)。我國(guó)在引進(jìn)、消化、吸收國(guó)外先進(jìn)技術(shù)的基礎(chǔ)上,開(kāi)發(fā)出國(guó)產(chǎn)掘錨聯(lián)合機(jī)組及配套設(shè)備,在陜北、鄂爾多斯等圍巖條件較好的礦區(qū),掘進(jìn)速度達(dá)到1 500~2 000 m/月。“全斷面掘進(jìn)機(jī)+錨桿鉆車”是適用于頂板穩(wěn)定、前掘后支的掘進(jìn)工藝,包括全斷面掘進(jìn)機(jī)、跨騎式錨桿臺(tái)車、連續(xù)運(yùn)輸系統(tǒng)等。在神東大柳塔礦應(yīng)用,最高進(jìn)尺達(dá)3 088 m/月[14]。
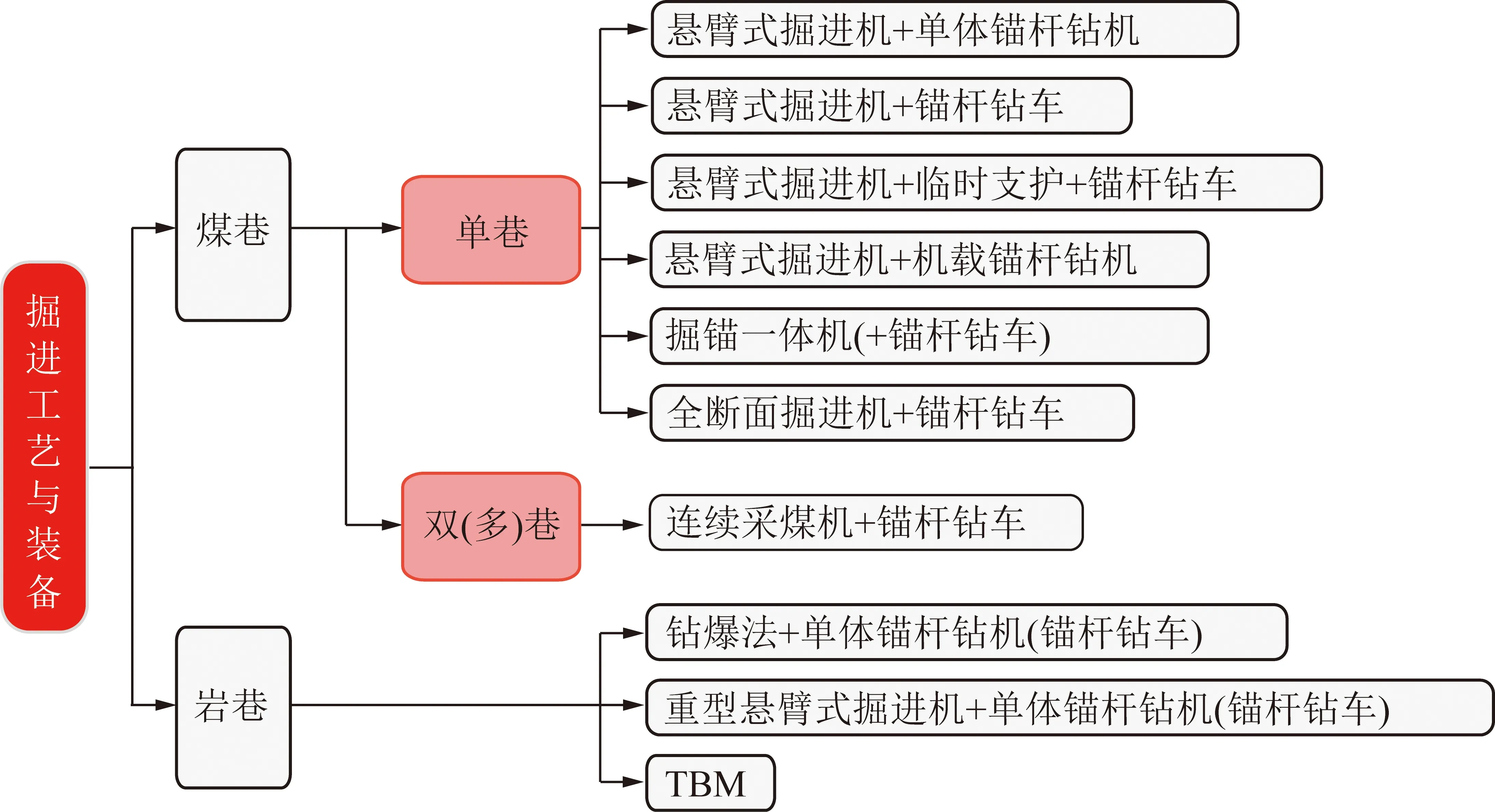
圖1 我國(guó)煤礦巷道掘進(jìn)工藝與裝備Fig.1 Heading technologies and equipment applied in Chinese coal mines
近年來(lái),我國(guó)煤礦智能化開(kāi)采技術(shù)及智慧煤礦建設(shè)發(fā)展迅速[15]。掘進(jìn)是煤礦生產(chǎn)中的一個(gè)關(guān)鍵環(huán)節(jié),掘進(jìn)自動(dòng)化、智能化水平也得到一定程度的提升[16]。探索了掘進(jìn)機(jī)自主導(dǎo)航、記憶截割,自動(dòng)化錨桿、錨索施工工藝與設(shè)備,智能通風(fēng)、除塵,掘支運(yùn)多工序智能協(xié)同控制等技術(shù),并在鄂爾多斯、陜北礦區(qū)較好的圍巖條件下得到應(yīng)用,顯著提高了煤巷掘進(jìn)速度。
筆者采用數(shù)值模擬方法研究掘進(jìn)工作面圍巖應(yīng)力、變形、破壞分布特征,研究圍巖地質(zhì)力學(xué)參數(shù)、掘進(jìn)與支護(hù)參數(shù)對(duì)掘進(jìn)工作面圍巖穩(wěn)定性的影響。分析掘進(jìn)工作面圍巖穩(wěn)定性、煤巖可掘性、可鉆性、可錨性,指出巷道掘進(jìn)存在的問(wèn)題,及提高煤巷掘進(jìn)速度的方法。最后,構(gòu)建掘進(jìn)自動(dòng)化、智能化總體技術(shù)架構(gòu),分析自動(dòng)化、智能化關(guān)鍵技術(shù),提出我國(guó)煤礦自動(dòng)化、智能化掘進(jìn)技術(shù)的發(fā)展路徑。
1 掘進(jìn)工作面圍巖應(yīng)力與變形分布特征及地質(zhì)力學(xué)影響因素
1.1 掘進(jìn)工作面圍巖應(yīng)力與變形分布特征
巷道開(kāi)挖后對(duì)原巖應(yīng)力場(chǎng)產(chǎn)生擾動(dòng),掘進(jìn)工作面周圍應(yīng)力重新分布,圍巖向開(kāi)挖空間移動(dòng)。當(dāng)應(yīng)力達(dá)到圍巖強(qiáng)度后,圍巖會(huì)發(fā)生破壞,甚至?xí)霈F(xiàn)圍巖結(jié)構(gòu)失穩(wěn)、冒頂片幫等現(xiàn)象。掘進(jìn)工作面周圍屬于空間問(wèn)題,必須采用三維力學(xué)模型進(jìn)行研究。
1.1.1 數(shù)值模型建立
采用3DEC BBM(Bonded Block Model)方法建立掘進(jìn)工作面數(shù)值計(jì)算模型,圍巖采用黏結(jié)到一起的四面體單元集合體模擬,可分析圍巖裂隙場(chǎng)發(fā)展過(guò)程。數(shù)值模型根據(jù)晉城寺河礦5310工作面回采巷道的工程地質(zhì)條件建立。巷道沿煤層底板掘進(jìn),煤層、頂?shù)装搴穸燃傲W(xué)參數(shù)見(jiàn)表1。各巖層彈性模量和泊松比通過(guò)將實(shí)驗(yàn)室單軸壓縮試驗(yàn)結(jié)果折減的方法得到,折減準(zhǔn)則為GSI及Hoek-Brown破壞準(zhǔn)則。各巖層的結(jié)構(gòu)面力學(xué)參數(shù)通過(guò)經(jīng)驗(yàn)設(shè)置。煤層和頂?shù)装錌BM模型的結(jié)構(gòu)面力學(xué)參數(shù)經(jīng)過(guò)校準(zhǔn)取得,校準(zhǔn)方法是采用塊體尺寸一樣的BBM模型進(jìn)行一系列的單軸壓縮試驗(yàn)測(cè)試,直到模型反映出的宏觀力學(xué)參數(shù)與目標(biāo)巖體的力學(xué)參數(shù)一致。
表1 模擬巷道頂?shù)装鍘r層分布及力學(xué)參數(shù)Table 1 Roof and floor strata around simulated entry and mechanical parameters
巷道埋深300 m,垂直應(yīng)力為7.5 MPa,最大、最小水平主應(yīng)力分別為垂直應(yīng)力的2.1,1.2倍。最大水平主應(yīng)力垂直巷道軸向。巷道斷面呈矩形,寬5.5 m,高4.2 m,掘進(jìn)工作面斷面積為23.1 m2。根據(jù)巷道斷面大小及掘進(jìn)工作面影響范圍,選取模型尺寸為寬×高×厚=55.5 m×63 m×16 m。模型4個(gè)側(cè)面和底面法向位移固定,頂面采用應(yīng)力邊界,模擬上覆巖層壓力。數(shù)值模型如圖2所示。
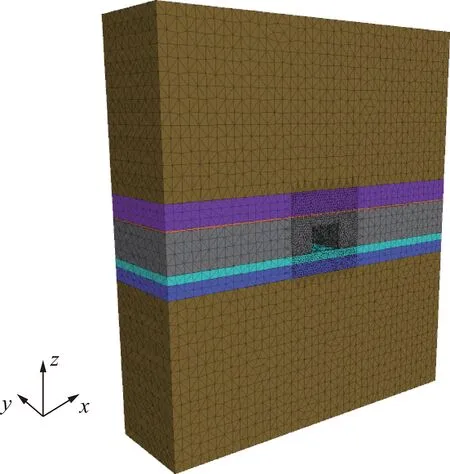
圖2 掘進(jìn)工作面數(shù)值模型Fig.2 Numerical model for heading face
巷道分步開(kāi)挖、分步支護(hù),分6個(gè)開(kāi)挖和支護(hù)步驟,每步開(kāi)挖2 m,以模擬掘進(jìn)工作面應(yīng)力場(chǎng)、位移場(chǎng)和裂隙場(chǎng)的演化過(guò)程。每步巷道開(kāi)挖后,在周邊(頂?shù)装濉蓭图熬蜻M(jìn)工作面)施加原巖應(yīng)力并逐步減小,模擬現(xiàn)場(chǎng)開(kāi)挖后圍巖應(yīng)力真實(shí)的釋放過(guò)程。采用冪指數(shù)方程釋放,即開(kāi)始釋放快,后期釋放慢,當(dāng)應(yīng)力釋放到原巖應(yīng)力的30%時(shí),安裝錨桿、錨索支護(hù)。錨桿和錨索采用3DEC內(nèi)置的Cable結(jié)構(gòu)單元來(lái)模擬。錨桿直徑22 mm,長(zhǎng)度2.4 m,錨固長(zhǎng)度1.2 m;錨索直徑17.8 mm,長(zhǎng)度6 m,錨固長(zhǎng)度2 m。頂板錨桿排距1 m,每排6根錨桿,間距0.9 m,錨桿全部垂直頂板布置。兩幫錨桿排距1 m,每排4根錨桿,間距1.1 m,全部垂直巷幫。頂板錨索采用2-0-2(隔1排打2根錨索)布置,間距為1.8 m,排距2 m,全都垂直巷道頂板。數(shù)值模型中錨桿、錨索力學(xué)參數(shù)見(jiàn)表2。

表2 模擬巷道錨桿錨索力學(xué)參數(shù)Table 2 Mechanical parameters of rock bolts and cables used in simulated entry
1.1.2 數(shù)值模擬結(jié)果分析
開(kāi)挖過(guò)程中掘進(jìn)工作面周圍最大主應(yīng)力分布、位移分布、破壞范圍分布分別如圖3~5所示。頂板中心以上1 m、煤幫中心以深1 m位置的三向應(yīng)力變化曲線如圖6所示,其中,σxx,σyy,σzz分別為x,y,z方向的應(yīng)力。巷道圍巖裂隙面積、破壞煤巖體積與至掘進(jìn)工作面距離的關(guān)系曲線如圖7所示。巷道表面位移與至掘進(jìn)工作面距離的關(guān)系曲線如圖8所示。需要說(shuō)明的是,由于離散元軟件計(jì)算的隨機(jī)性以及BBM模型塊體分布的不均質(zhì)性,在圍巖變形較大時(shí)塊體之間互相脫離產(chǎn)生離層,甚至個(gè)別塊體會(huì)脫離出來(lái),造成位移曲線上下起伏,尤其是在破壞、離層比較嚴(yán)重的頂板。
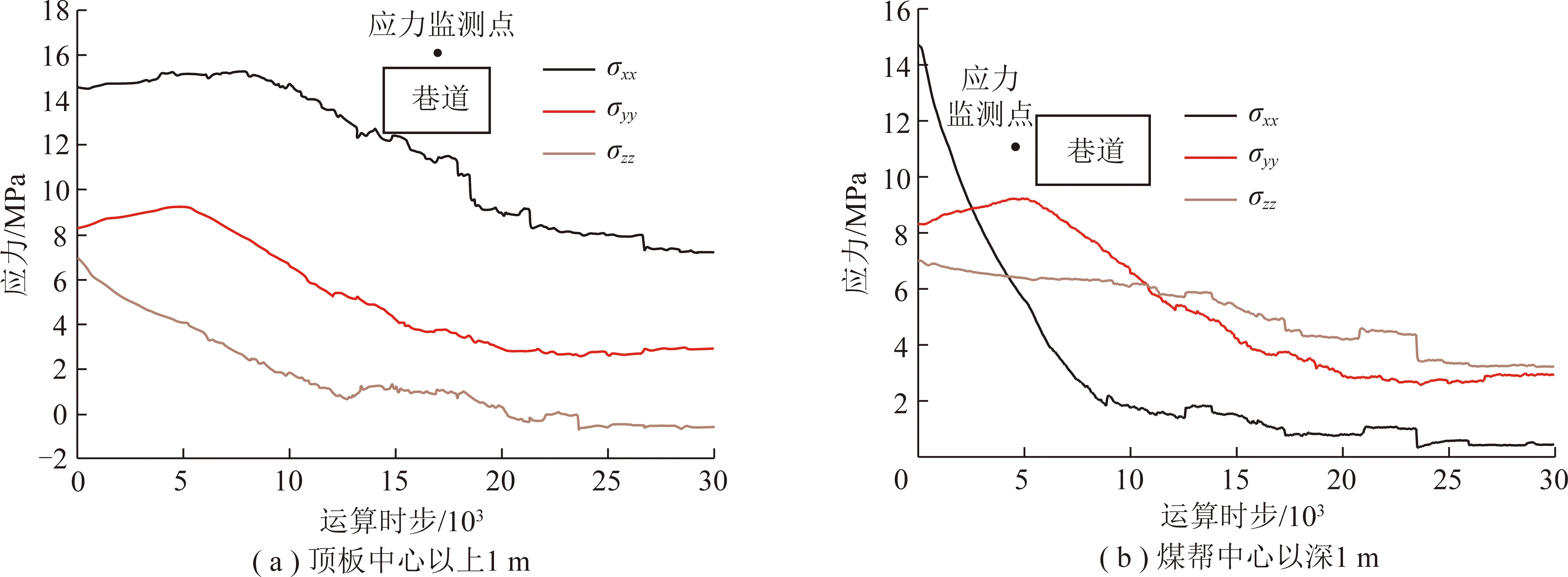
圖6 圍巖三向應(yīng)力變化曲線Fig.6 Variation curves of three-dimensional stresses around heading face
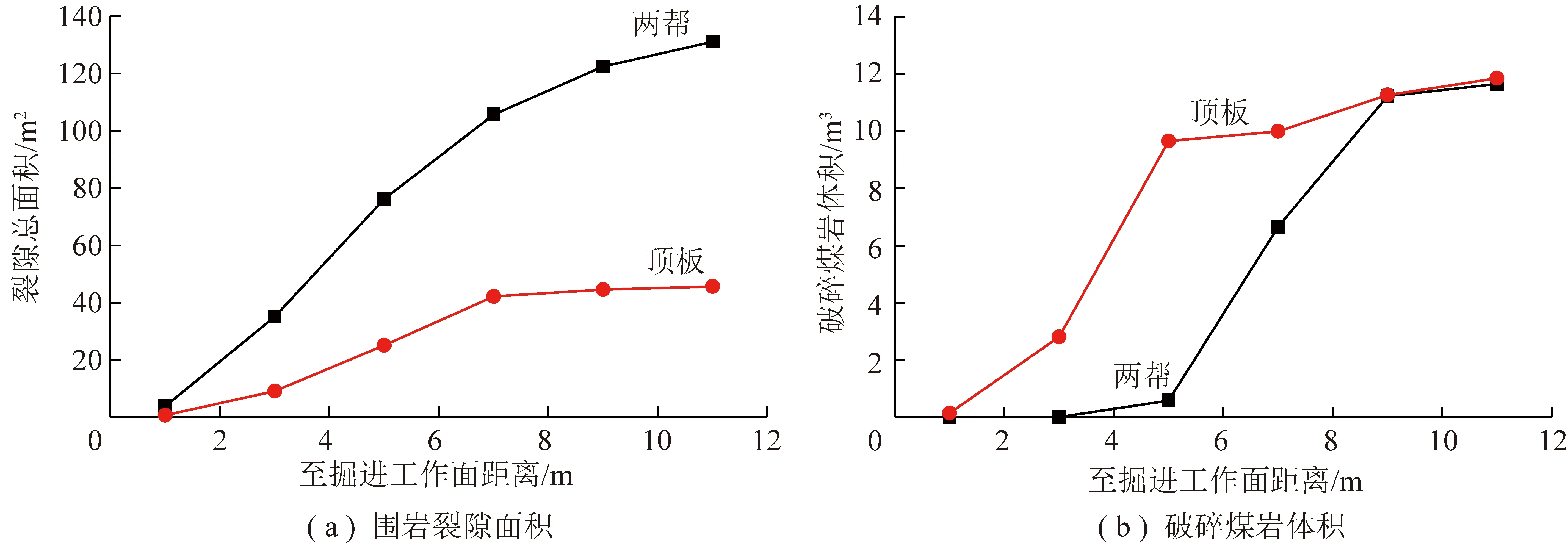
圖7 巷道圍巖裂隙面積、破碎煤巖體積與至掘進(jìn)工作面距離的關(guān)系Fig.7 Total fracture area and volume of broken rock vs distance to heading face
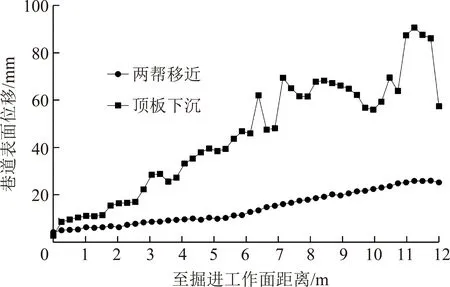
圖8 巷道表面位移與至掘進(jìn)工作面距離的關(guān)系Fig.8 Surface displacement of entry vs distance to heading face
從圖3~8中可得出:

圖3 掘進(jìn)工作面周圍應(yīng)力分布Fig.3 Stress distribution around heading face
(1)巷道開(kāi)挖以后,掘進(jìn)工作面周圍應(yīng)力重新分布。在掘進(jìn)工作面頂角和巷道四角周圍出現(xiàn)應(yīng)力集中區(qū),在工作面中部前方、后方的頂?shù)装搴蛢蓭椭胁砍霈F(xiàn)應(yīng)力降低區(qū)。工作面前方應(yīng)力降低區(qū)范圍小,而且隨工作面推進(jìn)變化不大。在工作面后方,緊鄰工作面2 m范圍內(nèi)應(yīng)力降低區(qū)小,隨著遠(yuǎn)離工作面不斷擴(kuò)大,應(yīng)力升高區(qū)不斷向圍巖深部轉(zhuǎn)移,到一定距離后應(yīng)力分布基本保持穩(wěn)定。頂板中部以上1 m位置的水平應(yīng)力和巷道軸向應(yīng)力隨著運(yùn)算時(shí)步增加先增大后降低,垂直應(yīng)力一直處于下降趨勢(shì)。煤幫中部以深1 m位置的水平應(yīng)力與垂直應(yīng)力隨著運(yùn)算時(shí)步增加不斷降低,水平應(yīng)力降幅明顯大于垂直應(yīng)力;巷道軸向應(yīng)力出現(xiàn)先增大后降低的趨勢(shì)。
(2)圍巖位移在超前工作面相當(dāng)于巷道寬度一半左右的位置開(kāi)始明顯增加。在剛開(kāi)挖的2 m范圍內(nèi),頂?shù)装逦灰菩。植挤秶淮蟆kS著遠(yuǎn)離掘進(jìn)工作面,頂板下沉量、兩幫移近量不斷增大,達(dá)到2倍巷道寬度時(shí)圍巖位移基本穩(wěn)定。頂板下沉量明顯大于兩幫移近量。頂板發(fā)生明顯位移的深度已經(jīng)超過(guò)錨桿長(zhǎng)度;底板由于是巖石,底臌量及底臌范圍較小;兩幫發(fā)生明顯位移的深度大于頂板。
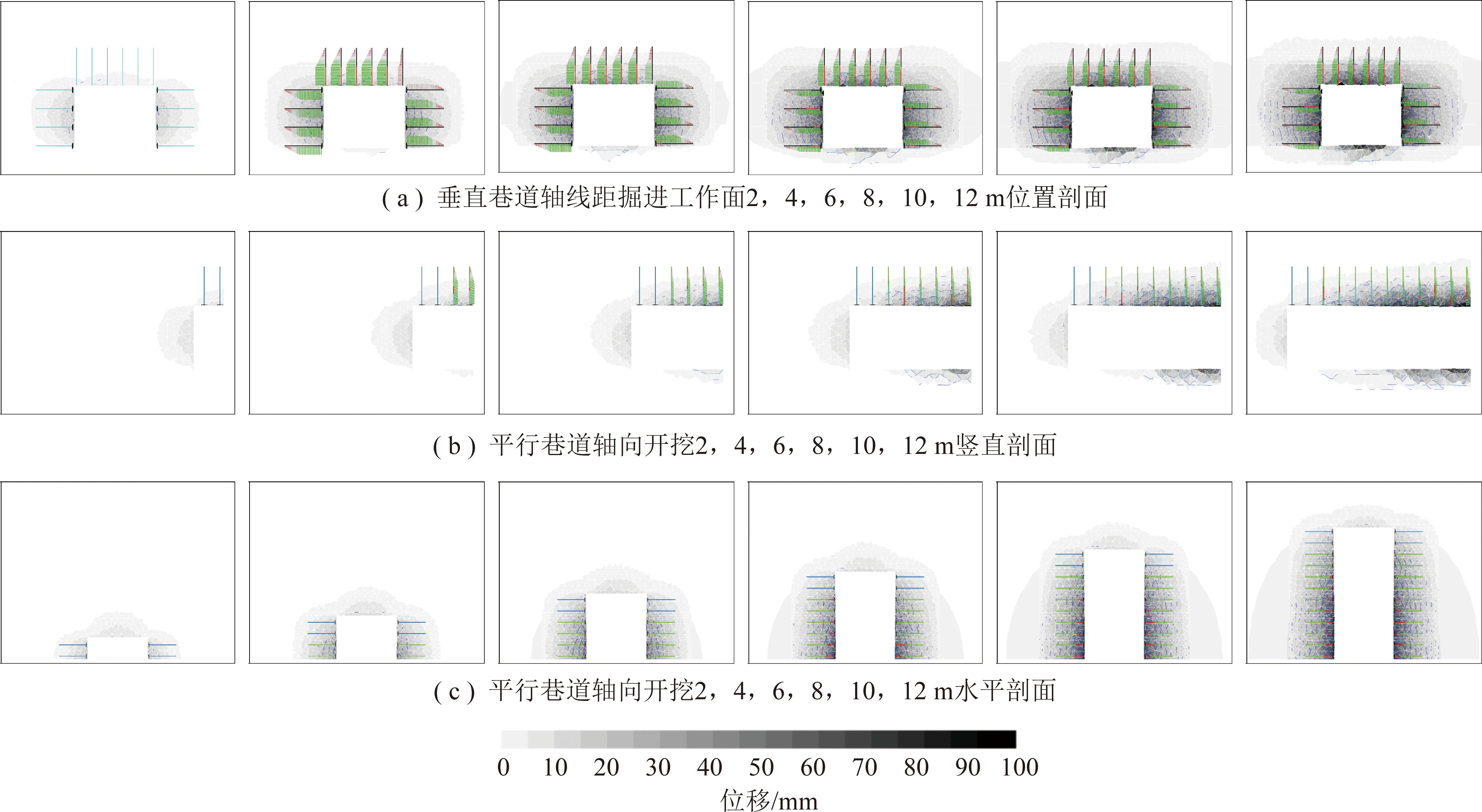
圖4 掘進(jìn)工作面周圍位移分布Fig.4 Displacement distribution around heading face
(3)掘進(jìn)工作面圍巖破壞范圍隨工作面不斷推進(jìn)而發(fā)生變化。在剛開(kāi)挖的2 m范圍內(nèi),只有零星的裂隙出現(xiàn),破壞范圍很小。開(kāi)挖到4 m時(shí),裂隙大面積出現(xiàn),頂板內(nèi)出現(xiàn)較小破壞區(qū)。隨著至工作面距離增加,頂板破壞深度不斷增大,最大接近錨桿長(zhǎng)度的2/3。兩幫出現(xiàn)大量裂隙和一定范圍破壞區(qū),但破壞深度明顯小于頂板。底板在開(kāi)挖6 m 后出現(xiàn)破壞,之后逐漸擴(kuò)大。圍巖破壞范圍在至工作面2倍巷道寬度時(shí)基本達(dá)到穩(wěn)定。
1.2 掘進(jìn)工作面圍巖應(yīng)力與變形的地質(zhì)力學(xué)影響因素
影響掘進(jìn)工作面圍巖應(yīng)力與變形的地質(zhì)力學(xué)因素主要有圍巖強(qiáng)度、地質(zhì)構(gòu)造及圍巖結(jié)構(gòu)、地應(yīng)力的大小與方向。下面以上述數(shù)值模型為基礎(chǔ)模型,通過(guò)改變頂板煤層強(qiáng)度、頂煤中的分層厚度和強(qiáng)度、地應(yīng)力,分析地質(zhì)力學(xué)參數(shù)的影響程度,數(shù)值模擬計(jì)算結(jié)果見(jiàn)表3。
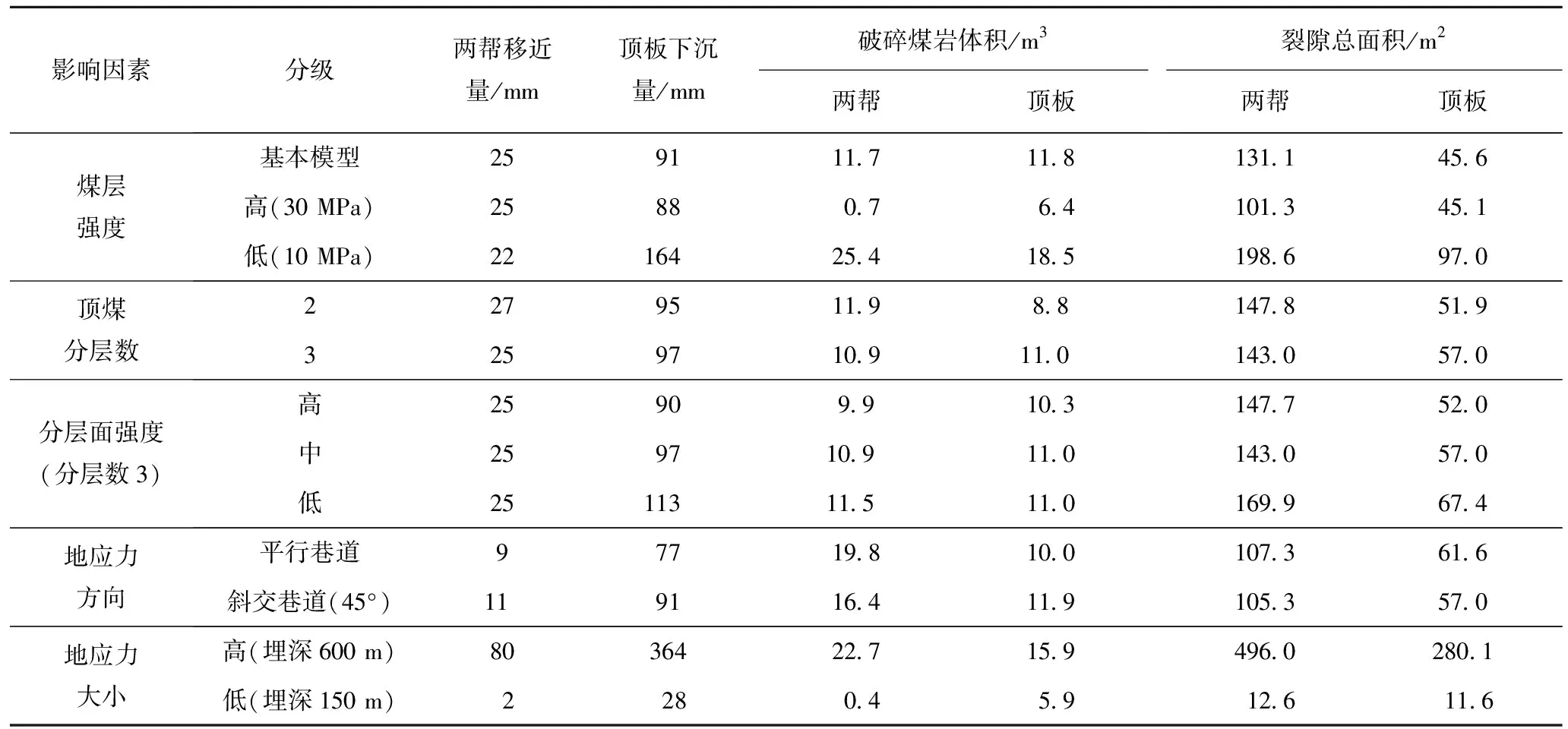
表3 掘進(jìn)工作面圍巖穩(wěn)定性的地質(zhì)力學(xué)影響因素模擬結(jié)果Table 3 Numerical modelling results of geomechanical parameter effects on rock stability around heading face
1.2.1 圍巖強(qiáng)度
煤層強(qiáng)度對(duì)巷道變形與破壞的影響十分顯著。高、中、低煤層強(qiáng)度下兩幫移近量相差不大,但頂板下沉相差近1倍。高、中強(qiáng)度煤體巷道頂板裂隙面積沒(méi)有顯著差別,但破碎煤體體積相差1倍,說(shuō)明在煤體強(qiáng)度與原巖應(yīng)力比在一定范圍時(shí),錨桿支護(hù)對(duì)煤體內(nèi)微裂隙的產(chǎn)生和發(fā)育作用有限,但是對(duì)抑制裂隙貫通、擴(kuò)展形成宏觀破壞面效果顯著。低強(qiáng)度煤層巷道頂板、兩幫裂隙面積比高強(qiáng)度煤層成倍增加,頂板、兩幫破碎煤體體積分別增加了1.89,35.29倍,如圖9所示。
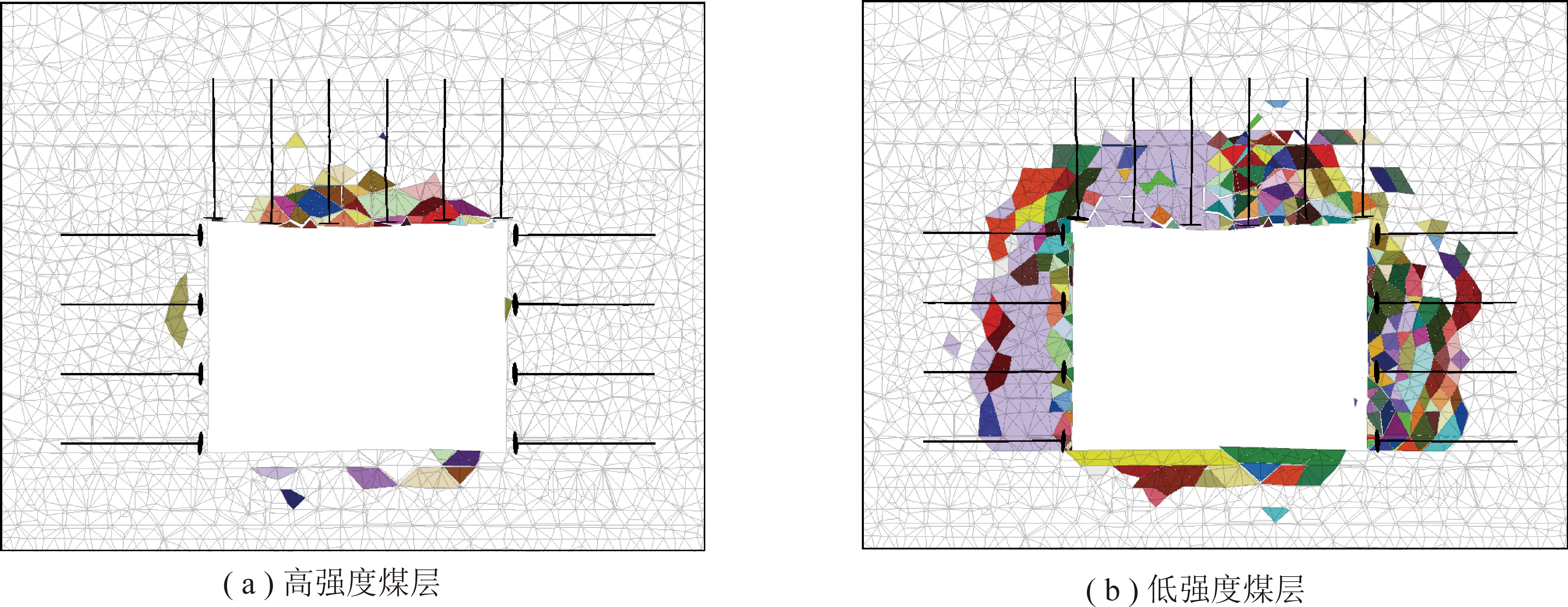
圖9 巷道周圍破壞范圍分布Fig.9 Damage distribution around entry
1.2.2 圍巖結(jié)構(gòu)與地質(zhì)構(gòu)造
頂煤水平層理的存在對(duì)巷道頂板裂紋的產(chǎn)生和發(fā)育有一定影響。層理面越多,裂隙越發(fā)育。但是頂煤水平層理的存在對(duì)頂煤破碎影響不是特別顯著,而且沒(méi)有規(guī)律性,特別是在錨桿、錨索支護(hù)的條件下,沒(méi)有層理面頂煤反而比有層理面頂煤更為破碎。原因可能是由于錨桿垂直層理面,更易發(fā)揮抑制層理面張開(kāi)、滑動(dòng)的作用。相對(duì)于沒(méi)有層理面條件下的不規(guī)則BBM塊體,錨桿對(duì)支護(hù)水平層理的效果更好。層理面強(qiáng)度對(duì)圍巖變形、頂煤裂隙的產(chǎn)生和發(fā)育呈現(xiàn)較好的規(guī)律性,即層理面強(qiáng)度越低,頂板下沉越大,圍巖裂隙越發(fā)育。
如果掘進(jìn)工作面前方有地質(zhì)構(gòu)造,對(duì)圍巖的穩(wěn)定性會(huì)產(chǎn)生影響。模擬分析了斷層走向垂直巷道軸向,斷層傾角為45°的情況,如圖10所示。斷層影響下的巷道圍巖破壞范圍分布、巷道表面位移與至掘進(jìn)工作面距離的關(guān)系分別如圖11,12所示。斷層的存在對(duì)斷層附近巷道頂板和兩幫的裂隙場(chǎng)和位移場(chǎng)擴(kuò)展有促進(jìn)作用。特別是斷層與頂板相交的位置,頂板下沉量急劇增加。
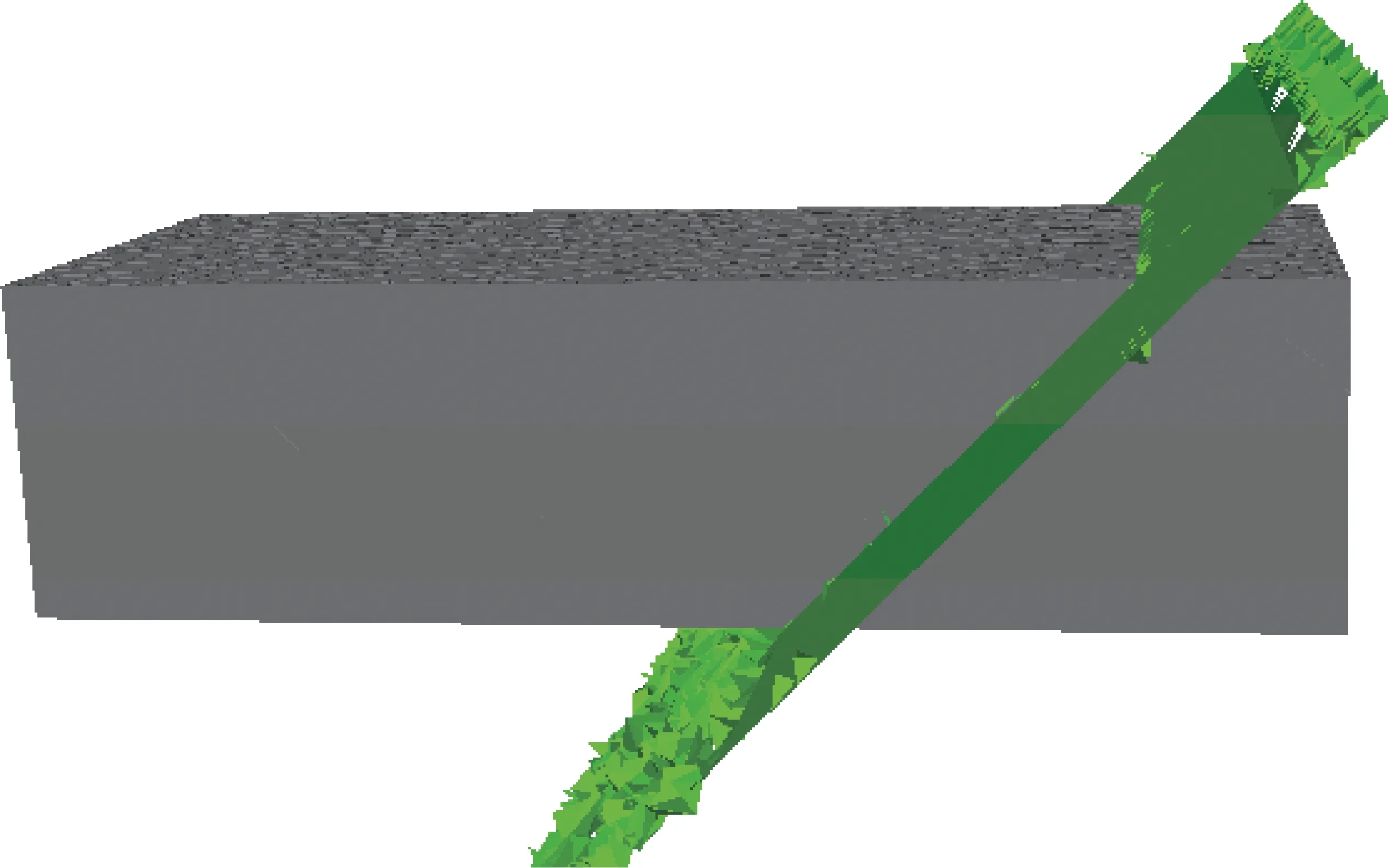
圖10 斷層影響數(shù)值模型Fig.10 Numerical model with fault
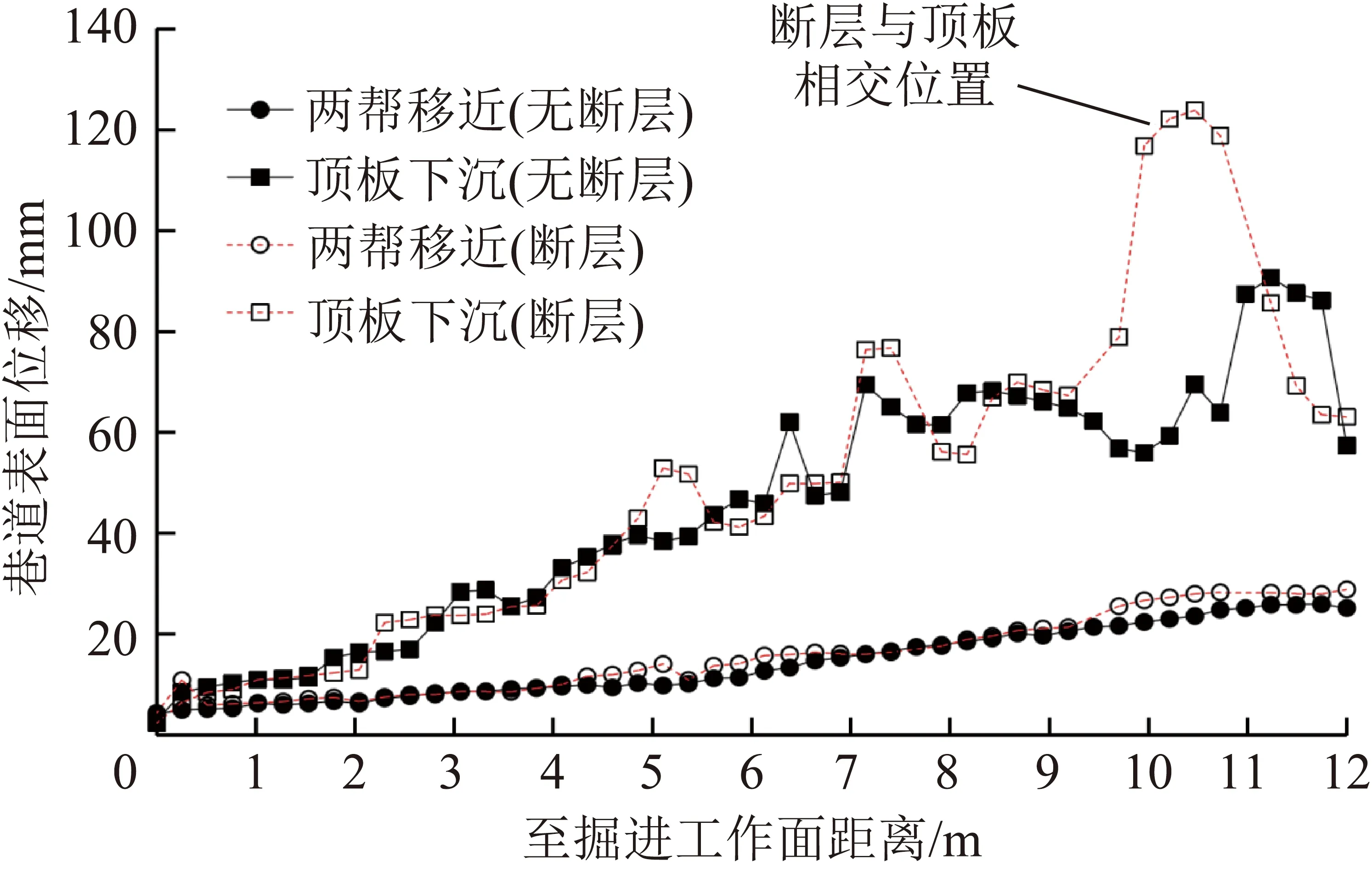
圖12 斷層影響下巷道表面位移與至掘進(jìn)工作面距離的關(guān)系曲線Fig.12 Surface displacement of entry vs distance to heading face under affect of fault
1.2.3 地應(yīng)力
模擬計(jì)算了低地應(yīng)力(埋深150 m)、中等地應(yīng)力(埋深300 m,基礎(chǔ)模型)和高地應(yīng)力(埋深600 m)的圍巖變形、破壞狀況。各種埋深條件下側(cè)壓系數(shù)均不變,最大水平主應(yīng)力垂直巷道軸向。埋深150,600 m下圍巖破壞狀況如圖13所示。埋深150 m時(shí)圍巖位移很小,破壞范圍主要分布在頂板淺部;當(dāng)埋深增加到600 m時(shí),頂板下沉、兩幫移近量比基礎(chǔ)模型分別增加3,2.2倍,頂?shù)住蓭途霈F(xiàn)較大范圍破壞,其中頂板破壞深度最大,接近錨桿長(zhǎng)度。即使是距離掘進(jìn)工作面2 m范圍內(nèi)的圍巖裂隙也非常發(fā)育。地應(yīng)力大小對(duì)巷道變形、破壞影響極為顯著。
最大水平主應(yīng)力與巷道軸向呈不同角度的模擬結(jié)果表明:當(dāng)最大水平主應(yīng)力與巷道軸向平行時(shí),頂板下沉、兩幫位移及頂板圍巖破碎程度均小于最大水平主應(yīng)力垂直巷道軸向時(shí)的情況,但兩幫破壞程度增大,而且大于頂板。最大水平主應(yīng)力方向與巷道軸向呈45°時(shí),巷道呈現(xiàn)明顯非對(duì)稱位移和破壞特征(圖14)。與最大主應(yīng)力相交的巷道右?guī)妥冃巍⒘严逗推扑槊黠@大于左幫。
2 掘進(jìn)參數(shù)對(duì)圍巖穩(wěn)定性的影響
掘進(jìn)參數(shù)包括巷道斷面形狀與參數(shù)、開(kāi)挖方式(一次開(kāi)挖、分步開(kāi)挖)、空頂距、掘進(jìn)速度等,這些參數(shù)對(duì)掘進(jìn)工作面圍巖穩(wěn)定性均有影響。此外,掘進(jìn)方式(鉆爆法、掘進(jìn)機(jī)法)及掘進(jìn)機(jī)的截割振動(dòng)也會(huì)影響圍巖的穩(wěn)定性。不同巷道寬度、空頂距、掘進(jìn)速度及分步開(kāi)挖下的數(shù)值模擬結(jié)果見(jiàn)表4,下面分別論述這些影響因素。
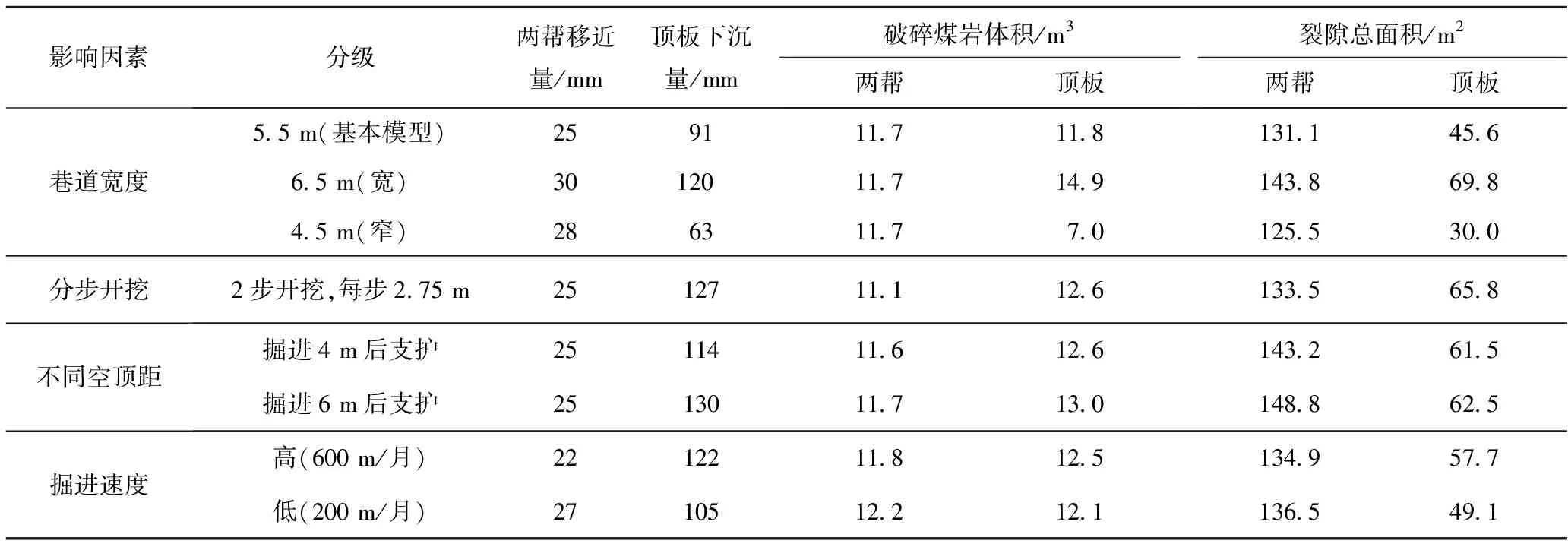
表4 掘進(jìn)參數(shù)對(duì)工作面圍巖穩(wěn)定性影響的模擬結(jié)果Table 4 Numerical modelling results of heading parameter effects on rock stability around heading face
2.1 巷道寬度
模擬了巷道寬度分別為4.5,5.5,6.5 m的3種情況,巷道高度均為4.2 m,錨桿、錨索間排距不變。不同巷道寬度圍巖裂隙面積變化曲線如圖15所示。3種寬度下兩幫移近量、煤幫破碎程度變化不大;頂板下沉變化明顯,寬度6.5 m時(shí)頂板下沉量比寬度5.5 m時(shí)增加了31.9%,而寬度4.5 m時(shí)頂板下沉量比寬度5.5 m時(shí)減少了30.8%。隨著巷道寬度增加,頂板破碎程度明顯增加,圍巖穩(wěn)定性變差。可見(jiàn),巷道寬度對(duì)頂板變形破壞影響十分顯著,對(duì)兩幫有一定影響,但不明顯。

圖15 不同巷道寬度圍巖裂隙面積變化曲線Fig.15 Variation curves of fracture area around entry with various width
2.2 開(kāi)挖方式
模擬了2種開(kāi)挖方式:全斷面一次開(kāi)挖(基礎(chǔ)模型)和分步開(kāi)挖。分步方式為每個(gè)掘進(jìn)時(shí)步分2次開(kāi)挖,第1次開(kāi)挖巷道左邊2.75 m,并安裝左幫及頂板左側(cè)錨桿、錨索;第2次開(kāi)挖巷道右邊2.75 m,安裝右?guī)图绊敯逵覀?cè)錨桿、錨索。2種開(kāi)挖方式下巷道表面位移與至掘進(jìn)工作面距離的關(guān)系曲線如圖16所示。2種開(kāi)挖方式兩幫移近量相差不大,頂板下沉量在至掘進(jìn)工作面6 m范圍內(nèi)也比較接近,之后,分步開(kāi)挖的頂板下沉量快速增加,明顯高于一次開(kāi)挖,頂板的破壞程度也大于一次開(kāi)挖。分析主要原因有2個(gè):① 左側(cè)開(kāi)挖后,右側(cè)未開(kāi)挖煤體與頂板形成尖角,產(chǎn)生較大的應(yīng)力集中,造成頂板中部破壞;② 巷道頂板左右兩側(cè)圍巖應(yīng)力釋放和錨桿、錨索發(fā)揮作用時(shí)機(jī)不一致,不利于在頂板形成承載結(jié)構(gòu)。
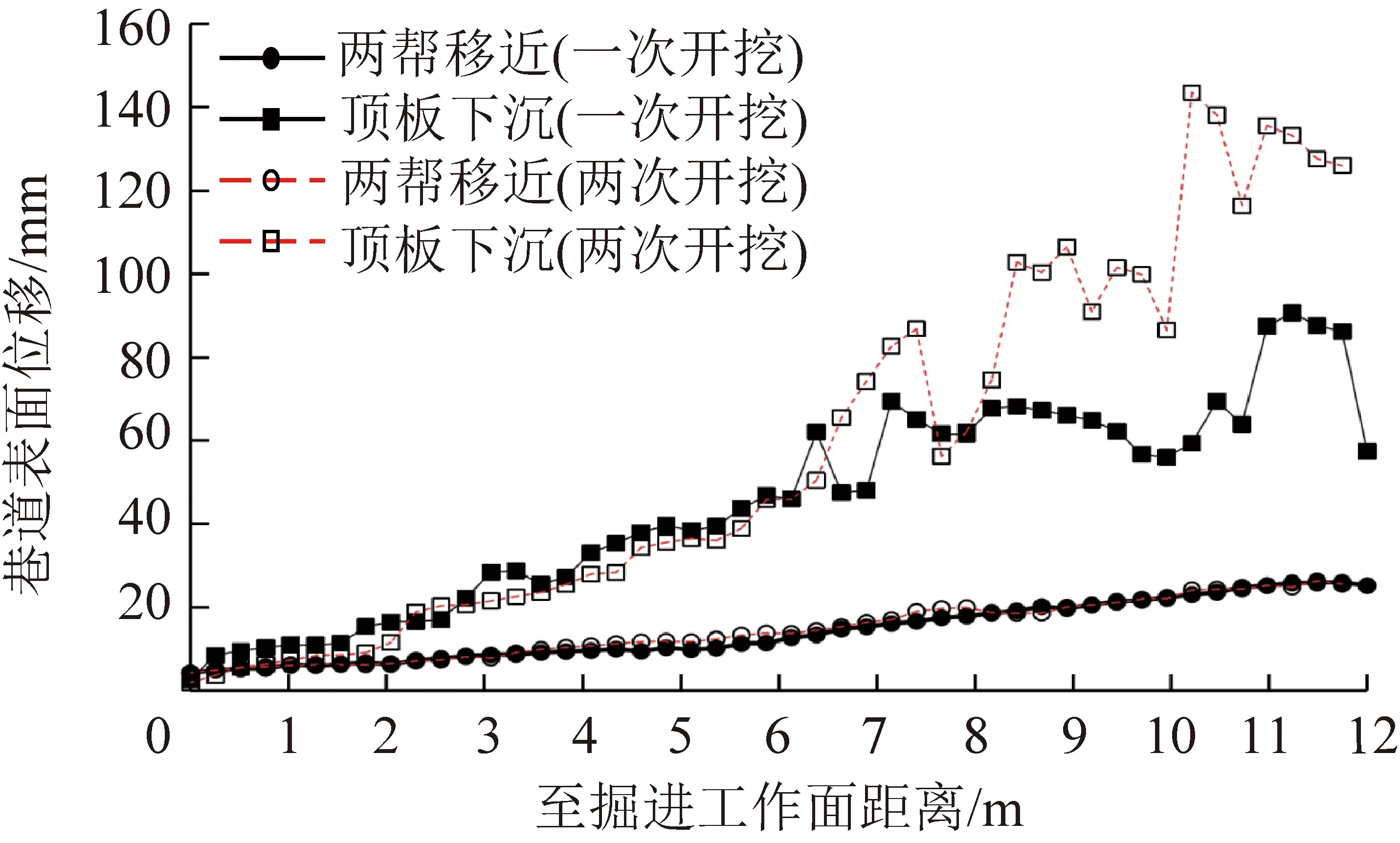
圖16 不同開(kāi)挖方式巷道表面位移與至掘進(jìn)工作面距離的關(guān)系Fig.16 Surface displacement of entry vs distance to heading face for various excavation pattern
2.3 空頂距
對(duì)比分析了空頂距分別為2 m(基礎(chǔ)模型)、4 m 和6 m時(shí)的情況。6 m空頂距時(shí)頂板下沉量比2 m空頂距時(shí)增加了42.9%。不同空頂距圍巖裂隙面積變化曲線如圖17所示。空頂距對(duì)圍巖裂隙場(chǎng)的影響比較顯著,空頂距越大,兩幫和頂板裂隙越多、分布越廣,在距離掘進(jìn)工作面的不同位置都是如此。空頂距較大時(shí)(大于4 m),掘進(jìn)工作面2 m范圍內(nèi)裂隙已經(jīng)開(kāi)始發(fā)育;而在空頂距較小時(shí)(2 m),掘進(jìn)工作面2 m范圍內(nèi)裂隙沒(méi)有明顯發(fā)育,表明錨桿及時(shí)支護(hù)不僅可抑制支護(hù)區(qū)域內(nèi)的裂隙發(fā)育,對(duì)鄰近未支護(hù)區(qū)域裂隙的發(fā)育也有一定的控制作用。
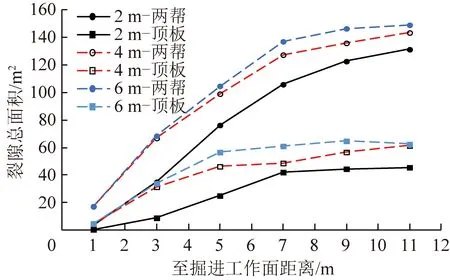
圖17 不同空頂距圍巖裂隙面積變化曲線Fig.17 Variation curves of fracture area around entry with various unsupported span
2.4 掘進(jìn)速度
掘進(jìn)速度的影響主要反映在巷道開(kāi)挖后原巖應(yīng)力不同的釋放速度以及錨桿、錨索的支護(hù)時(shí)機(jī)上。較快的巷道掘進(jìn)速度對(duì)應(yīng)較慢的應(yīng)力釋放速度。為此,設(shè)置了不同的應(yīng)力釋放速度模擬不同的掘進(jìn)速度,如圖18所示,其中,Pr為應(yīng)力釋放率;cs為當(dāng)前計(jì)算時(shí)步;s為應(yīng)力開(kāi)始釋放時(shí)的計(jì)算時(shí)步。基礎(chǔ)模型應(yīng)力釋放到原巖應(yīng)力的30%時(shí),安裝錨桿、錨索支護(hù);較慢掘進(jìn)速度該值為18%,較快掘進(jìn)速度該值為46%。不同掘進(jìn)速度圍巖裂隙面積變化曲線如圖19所示。
巷道圍巖變形、破壞程度整體表現(xiàn)為較快掘進(jìn)速度>較慢掘進(jìn)速度>中等掘進(jìn)速度。較快速度巷道圍巖變形破壞最多的原因在于錨桿安裝時(shí),巷道淺部應(yīng)力釋放較少,錨桿安裝后圍巖應(yīng)力繼續(xù)釋放,圍巖不斷變形,導(dǎo)致錨桿變形量大、載荷高,甚至發(fā)生破斷。較慢掘進(jìn)速度巷道圍巖變形破壞較多的原因是錨桿支護(hù)過(guò)于滯后,此時(shí)圍巖已經(jīng)發(fā)生裂隙張開(kāi)和滑動(dòng),錨桿的主動(dòng)支護(hù)作用不能充分發(fā)揮。可見(jiàn),過(guò)快、過(guò)慢的掘進(jìn)速度對(duì)圍巖支護(hù)效果均有影響。
3 支護(hù)對(duì)掘進(jìn)工作面圍巖穩(wěn)定性的影響
巷道開(kāi)挖后,絕大多數(shù)需要支護(hù),對(duì)于極破碎、極軟圍巖條件,還需超前支護(hù)或加固(管棚、錨桿、注漿等)。按支護(hù)時(shí)間可劃分為臨時(shí)支護(hù)和永久支護(hù)。臨時(shí)支護(hù)是設(shè)置在掘進(jìn)工作面空頂區(qū)保持圍巖穩(wěn)定、為永久支護(hù)施工提供安全空間的臨時(shí)性支護(hù),包括前探梁、單體支柱、掘進(jìn)機(jī)載臨時(shí)支護(hù)及噴層等;永久支護(hù)是臨時(shí)支護(hù)之后設(shè)置的長(zhǎng)期控制巷道圍巖變形的支護(hù),如錨桿、錨索,各種棚式支架、砌碹支架等。下面分析不同臨時(shí)支護(hù)對(duì)圍巖穩(wěn)定性的影響,及永久支護(hù)為錨桿、錨索支護(hù),一次支護(hù)和分兩次支護(hù)對(duì)圍巖控制效果的影響。數(shù)值模擬結(jié)果見(jiàn)表5。
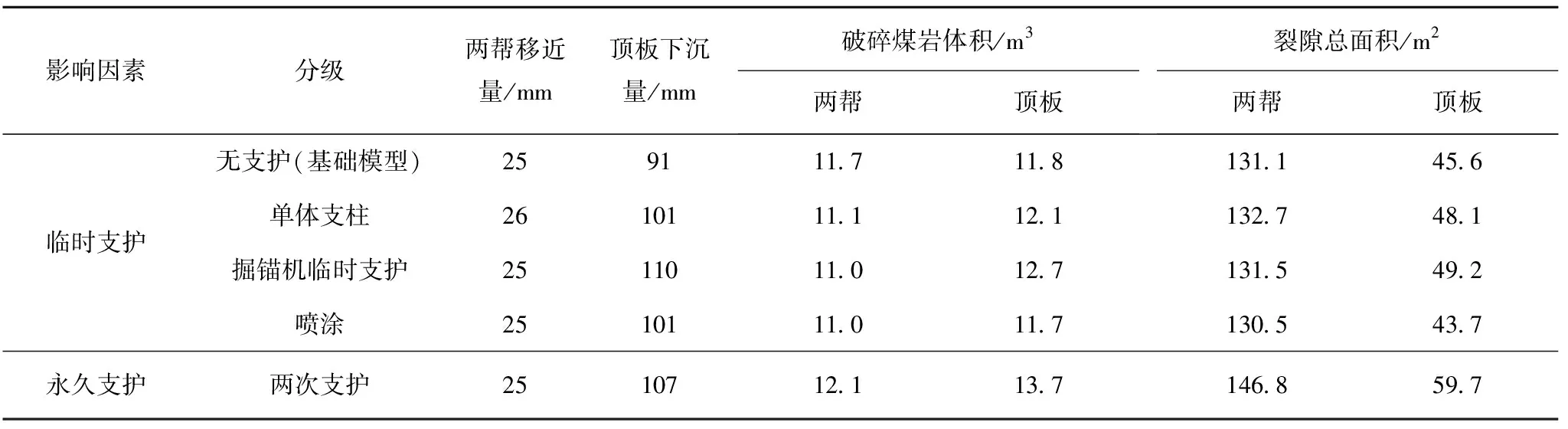
表5 支護(hù)對(duì)工作面圍巖穩(wěn)定性的影響模擬結(jié)果Table 5 Numerical modelling results of support effects on rock stability around heading face
3.1 臨時(shí)支護(hù)
考慮3種臨時(shí)支護(hù)方式:① 單體支柱,工作面掘進(jìn)2 m后架設(shè)兩排單體支柱,再掘進(jìn)2 m后打錨桿;② 掘錨一體機(jī)的臨時(shí)支護(hù);③ 噴層,工作面掘進(jìn)2 m后噴層,再掘進(jìn)2 m后噴層、打錨桿。圖20為3種臨時(shí)支護(hù)圍巖裂隙面積變化曲線。與基礎(chǔ)模型相比,由于設(shè)置臨時(shí)支護(hù)導(dǎo)致錨桿支護(hù)安裝滯后,使得頂板下沉均有所增加。單體支柱對(duì)頂板裂隙發(fā)育及煤體破碎的抑制作用不明顯;掘錨一體機(jī)臨時(shí)支護(hù)對(duì)頂板裂隙發(fā)育及煤體破碎有一定的抑制作用;噴層在至掘進(jìn)工作面7 m范圍內(nèi)作用不明顯,之后頂板裂隙發(fā)育及煤體破碎程度有所降低。可見(jiàn),最有效的方法是盡快在較小的空頂距下安裝永久支護(hù)。掘進(jìn)后安裝及時(shí)、主動(dòng)、支護(hù)阻力大的臨時(shí)支護(hù)效果較好;噴層可起到防風(fēng)化、防破碎煤巖塊掉落的作用。
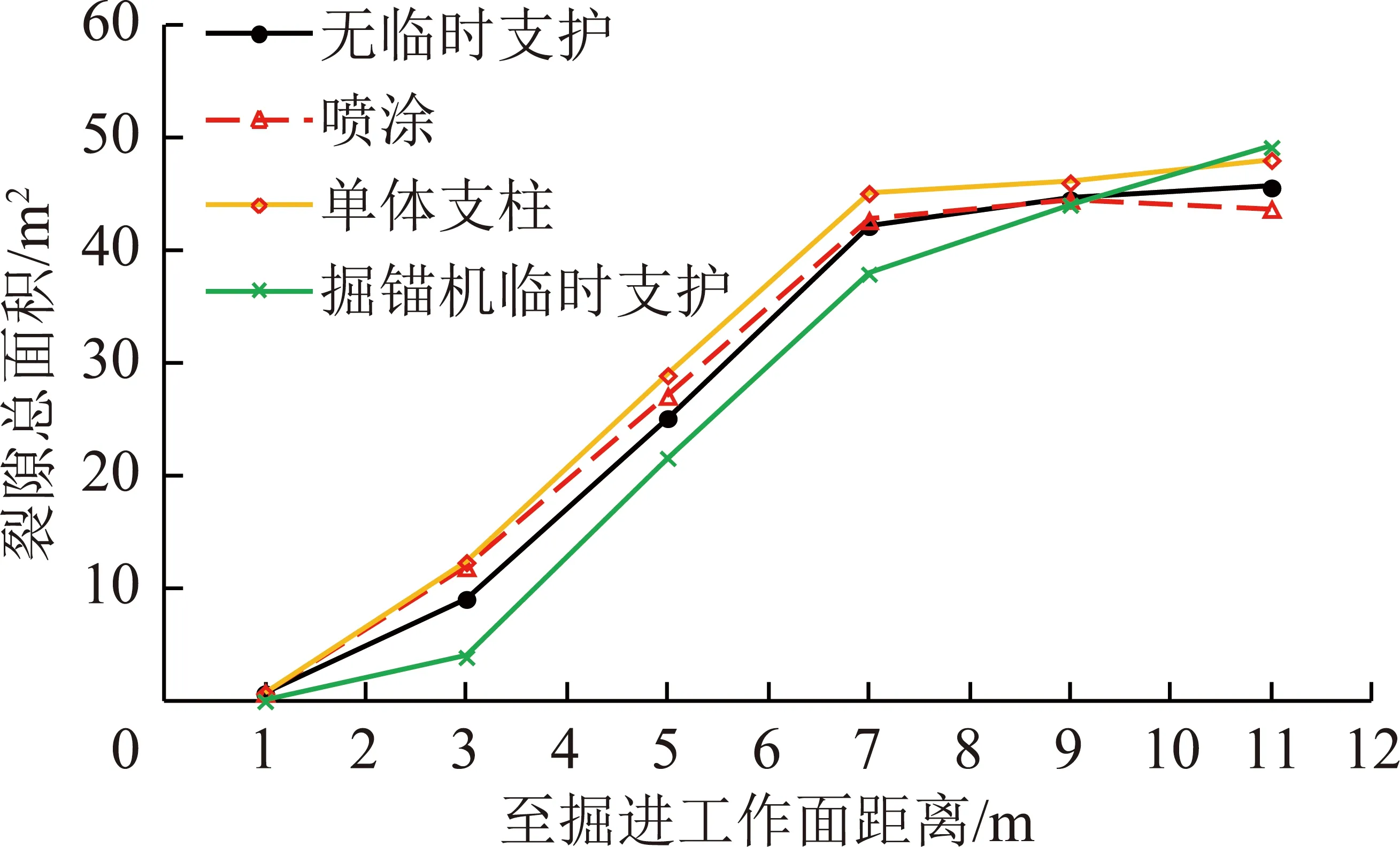
圖20 不同臨時(shí)支護(hù)圍巖裂隙面積變化曲線Fig.20 Variation curves of fracture area around entry with various temporary supports
3.2 永久支護(hù)
基礎(chǔ)模型中,工作面掘進(jìn)2 m后,錨桿、錨索支護(hù)一次完成。有些煤礦為了提高掘進(jìn)速度,將支護(hù)分為2次,在巷道掘出后先安裝部分錨桿,在掘進(jìn)機(jī)后方補(bǔ)齊所有錨桿、錨索。為分析分次支護(hù)過(guò)程,模擬了如圖21所示的分次錨桿錨索支護(hù)方案。工作面掘進(jìn)2 m,頂板、兩幫各安裝2排錨桿,每排2根;之后掘進(jìn)工作面逐步向前推進(jìn)到第4開(kāi)挖時(shí)步,補(bǔ)齊第1開(kāi)挖時(shí)步的錨桿和錨索。一次與兩次支護(hù)下巷道表面位移與至掘進(jìn)工作面距離的關(guān)系曲線如圖22所示。2種支護(hù)方式兩幫移近量相差不大,頂板下沉在滯后工作面6 m以后兩次支護(hù)明顯高于一次支護(hù),圍巖裂隙發(fā)育及煤體破碎也顯著增大。由于部分錨桿和錨索支護(hù)不及時(shí),頂板位移和圍巖裂隙場(chǎng)的擴(kuò)展均大于一次支護(hù)。可見(jiàn),通過(guò)分次支護(hù)提高掘進(jìn)速度是以影響錨桿、錨索支護(hù)效果為代價(jià)的。因此,分次支護(hù)應(yīng)限定在一定的地質(zhì)和生產(chǎn)條件下,使得兩次支護(hù)效果不受到過(guò)大影響,確保支護(hù)的有效和巷道安全。
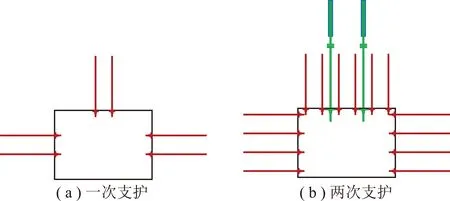
圖21 兩次錨桿錨索支護(hù)布置Fig.21 Layout of twice rock bolting and cable bolting
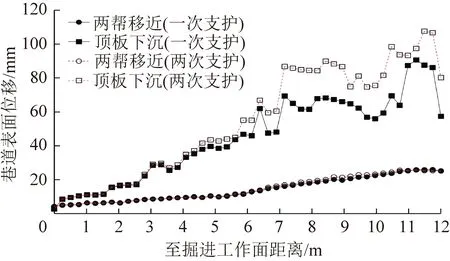
圖22 一次與兩次支護(hù)下巷道表面位移與至掘進(jìn)工作面距離的關(guān)系曲線Fig.22 Surface displacement of entry vs distance to heading face for once support for ever and twice support
4 掘進(jìn)工作面圍巖穩(wěn)定性分類
以上分析了影響掘進(jìn)工作面圍巖穩(wěn)定性的地質(zhì)力學(xué)參數(shù)及掘進(jìn)、支護(hù)方式及參數(shù),影響因素眾多。我國(guó)煤礦巷道地質(zhì)條件復(fù)雜、多變,除鄂爾多斯、陜北等少數(shù)礦區(qū)地質(zhì)條件簡(jiǎn)單、圍巖穩(wěn)定外,大多數(shù)礦區(qū)圍巖屬于一般、不穩(wěn)定、極不穩(wěn)定條件,需要對(duì)掘進(jìn)工作面圍巖進(jìn)行分類,然后分不同類型的圍巖條件提出快速掘進(jìn)工藝,配套相應(yīng)的設(shè)備。
國(guó)內(nèi)外在巖石分類方面已經(jīng)做了大量工作,目前主要的巖石分類系統(tǒng)見(jiàn)表6[17-25]。從表6可知,影響巖體質(zhì)量和穩(wěn)定性的因素很多,包括巖塊抗壓強(qiáng)度,巖體結(jié)構(gòu)面密度、強(qiáng)度,水敏性,原巖應(yīng)力及采動(dòng)應(yīng)力影響等。有的分類系統(tǒng)只考慮了巖體本身的質(zhì)量,沒(méi)有考慮應(yīng)力的影響(如RMR,GSI及美國(guó)煤礦頂板分類);有的分類系統(tǒng)則全面考慮了巖體質(zhì)量、原巖應(yīng)力及采動(dòng)應(yīng)力等各種因素對(duì)巖體分級(jí)的影響(如德國(guó)硬煤煤礦巖體分類,采礦巖體地質(zhì)力學(xué)分類,我國(guó)緩傾斜、傾斜中厚煤層回采巷道圍巖穩(wěn)定性分類)。巖體分類指標(biāo)RMR,Q及BQ值都給出相應(yīng)的巖體自穩(wěn)能力,如圖23所示,這對(duì)判別掘進(jìn)工作面圍巖的穩(wěn)定性是非常重要的。當(dāng)Q<0.01或RMR<20時(shí),空頂距1 m時(shí)的自穩(wěn)時(shí)間僅為30 min左右;而當(dāng)Q>100或RMR>80時(shí),空頂距15 m時(shí)的自穩(wěn)時(shí)間可達(dá)20 a。工程巖體質(zhì)量指標(biāo)BQ認(rèn)為,對(duì)于Ⅰ類巖體,跨度≤20 m時(shí)可長(zhǎng)期穩(wěn)定,而對(duì)于Ⅴ類巖體,則沒(méi)有自穩(wěn)能力。
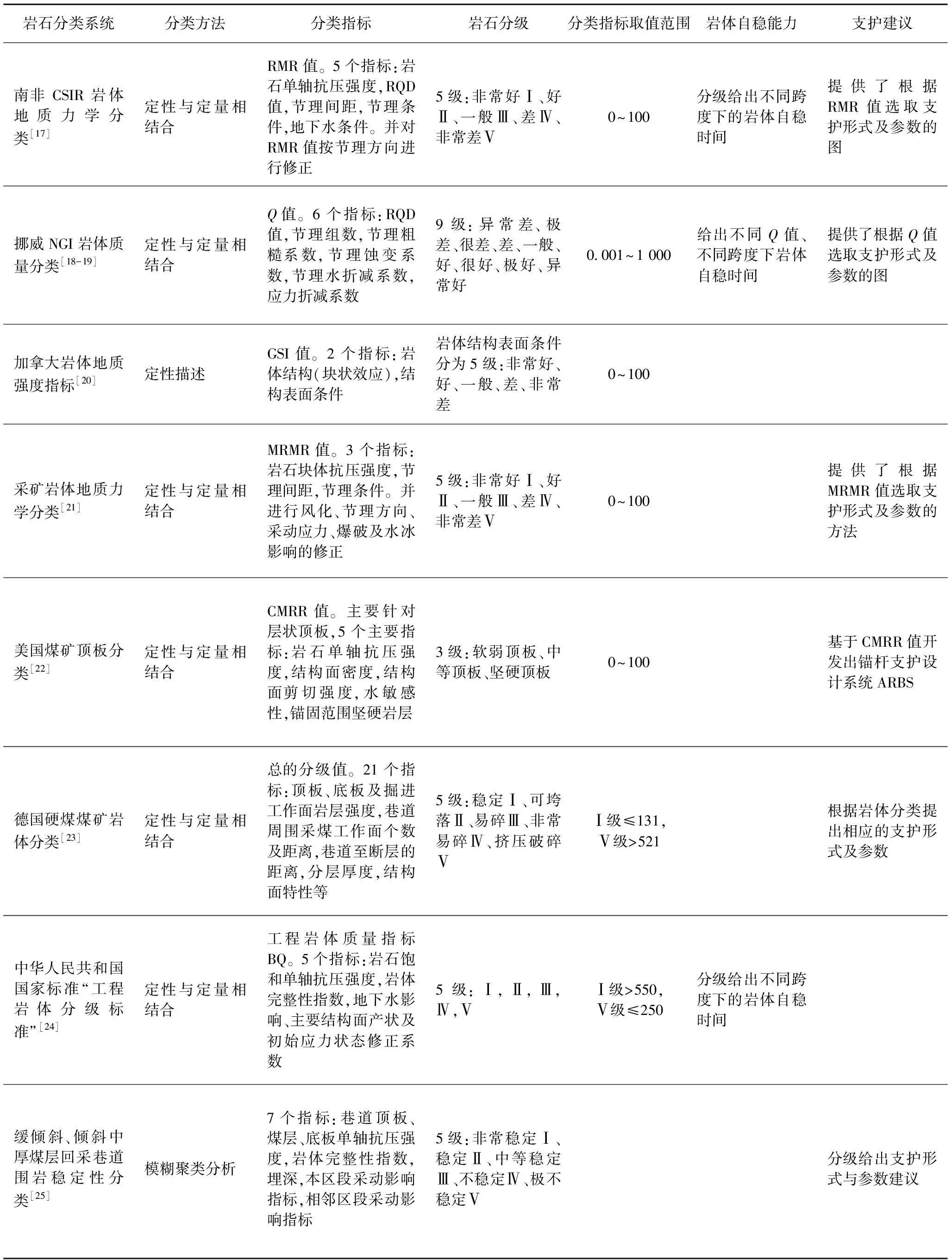
表6 國(guó)內(nèi)外主要巖石分類系統(tǒng)Table 6 Main rock classification systems at home and abroad
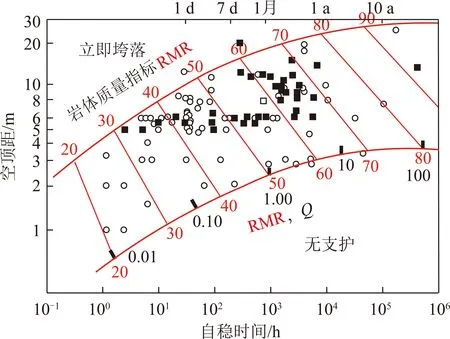
圖23 基于RMR與Q值的巖體自穩(wěn)時(shí)間估計(jì)Fig.23 Rock mass standup time estimations based on RMR-value and Q-value
參考國(guó)內(nèi)外巖石分類系統(tǒng)的成果,結(jié)合前述的掘進(jìn)工作面圍巖穩(wěn)定性影響因素的數(shù)值模擬結(jié)果,充分考慮掘進(jìn)工作面的時(shí)空特征,根據(jù)掘進(jìn)工作面空頂距及空頂時(shí)間,將煤巷掘進(jìn)工作面頂板與兩幫的穩(wěn)定性進(jìn)行分類,見(jiàn)表7。將圍巖穩(wěn)定性分為5類:非常穩(wěn)定、穩(wěn)定、一般、不穩(wěn)定、極不穩(wěn)定,劃分了每類圍巖的空頂、幫距及自穩(wěn)時(shí)間,提出了相應(yīng)的支護(hù)要求。
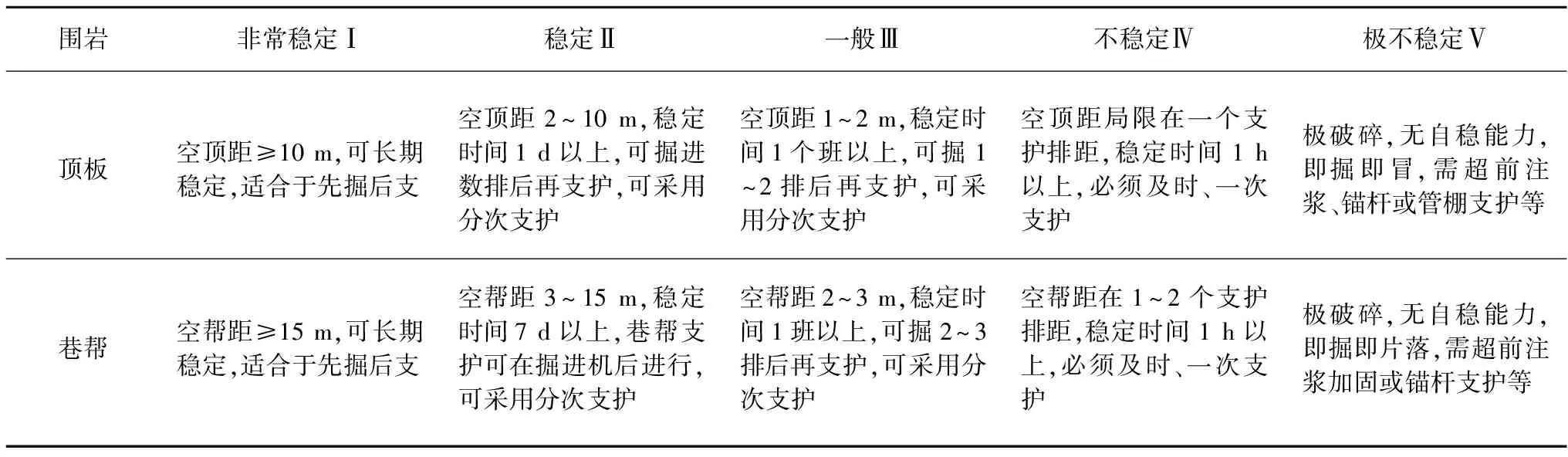
表7 煤巷掘進(jìn)工作面圍巖穩(wěn)定性分類Table 7 Stability classification system for rock surrounding coal heading faces
5 煤巷可掘性、可鉆性及可錨性分析
煤巷掘進(jìn)速度不僅與圍巖類型、穩(wěn)定性有關(guān),而且與被截割煤巖體的性質(zhì)密不可分。掘進(jìn)中的關(guān)鍵工序是割煤與支護(hù)。割煤涉及掘進(jìn)設(shè)備與被截割煤巖體的適應(yīng)性,而錨桿、錨索支護(hù)均需要在圍巖中鉆孔,鉆孔速度與效率顯著影響支護(hù)速度。另外,圍巖的可錨性是采用錨桿、錨索支護(hù)的必要前提,必須滿足設(shè)計(jì)要求。
5.1 煤巷可掘性
在綜合機(jī)械化掘進(jìn)中,掘進(jìn)機(jī)破巖能力與截割速度很大程度上取決于被截割煤巖體的物理力學(xué)性質(zhì)。為了描述巖體開(kāi)挖的難易程度,提出巖體可開(kāi)挖性的概念。在硬巖隧道掘進(jìn)方面,為了分析隧道掘進(jìn)機(jī)TBM的適應(yīng)性,BIENIAWSKI等[26]提出巖體可開(kāi)挖性指標(biāo)(RME)。該指標(biāo)包括巖石單軸抗壓強(qiáng)度、可鉆性、掘進(jìn)工作面巖體節(jié)理、自穩(wěn)能力及地下水等5個(gè)參數(shù)。借鑒隧道掘進(jìn)的研究成果,筆者提出煤巷可掘性的概念,并初步根據(jù)煤巷地質(zhì)條件,提出可掘性分類,見(jiàn)表8。根據(jù)掘進(jìn)工作面煤層賦存情況、煤層強(qiáng)度與結(jié)構(gòu)、掘后圍巖的穩(wěn)定性等,將煤巷可掘性分為5類:非常好、好、一般、差、非常差。有些指標(biāo)還需要進(jìn)一步定量化。
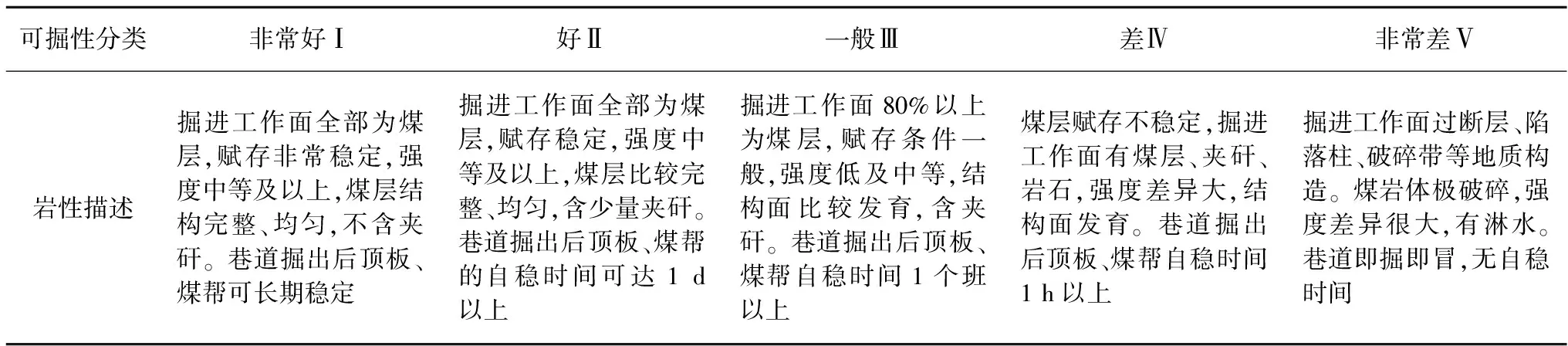
表8 煤巷可掘性分類Table 8 Excavability classification system for coal entries
開(kāi)挖比能是評(píng)價(jià)巖體機(jī)械開(kāi)挖難易程度的重要概念。對(duì)于隧道掘進(jìn)機(jī)(TBM)[26]可表示為
Es=F/A+2π(NT/A)vA
(1)
式中,Es為開(kāi)挖比能,kJ/m3;F為截割頭推力,kN;A為掘進(jìn)工作面面積,m2;N為截割頭轉(zhuǎn)速,r/s;T為施加的扭矩,kN·m;vA為平均掘進(jìn)速度,m/s。
可見(jiàn),開(kāi)挖比能由掘進(jìn)機(jī)截割頭推力引起的比能和截割頭旋轉(zhuǎn)引起的比能兩部分組成。BIENIAWSKI等研究了巖體可開(kāi)挖性與開(kāi)挖比能的相關(guān)關(guān)系。目前,用于煤巷掘進(jìn)的設(shè)備有綜掘機(jī)、連續(xù)采煤機(jī)及掘錨一體化機(jī)組。應(yīng)全面、系統(tǒng)的測(cè)試與研究不同掘進(jìn)設(shè)備的截割比能,分析與可掘性的關(guān)系,為提高掘進(jìn)速度提供必要的基礎(chǔ)。
5.2 圍巖的可鉆性
在掘進(jìn)與支護(hù)過(guò)程中,破巖主要有2個(gè)環(huán)節(jié):① 前述的掘進(jìn),對(duì)于寬度5 m、高度3.5 m的矩形斷面巷道,每米破巖量為17.5 m3,規(guī)模比較大;② 錨桿、錨索支護(hù)所需要的鉆孔,對(duì)于直徑28 mm的鉆孔,每米鉆孔的破巖量?jī)H為6.2×10-4m3,規(guī)模很小。假設(shè)每米巷道布置12根錨桿,2根錨索,錨桿孔深2.3 m,錨索孔深6 m,則每米巷道總的鉆孔破巖量為0.024 m3,僅為每米巷道掘進(jìn)破巖量的0.14%。
雖然鉆孔破巖量遠(yuǎn)小于掘進(jìn),但鉆孔速度顯著影響錨桿、錨索支護(hù)速度,因此根據(jù)錨固巖層性質(zhì),選擇合適的鉆具對(duì)提高支護(hù)速度有重要作用。巖石可鉆性是判別巖石鉆進(jìn)難易程度的指標(biāo),在石油天然氣鉆井工程中研究的比較充分,并頒布了行業(yè)標(biāo)準(zhǔn)[27]。巖石可鉆性測(cè)試采用微型鉆頭,根據(jù)鉆頭鉆進(jìn)規(guī)定深度所需要的時(shí)間,將巖石分為3類(Ⅰ軟、Ⅱ中、Ⅲ硬)10級(jí)。其他行業(yè)也對(duì)巖石可鉆性進(jìn)行了研究[28-29],建立了巖石可鉆性級(jí)值和巖石硬度、強(qiáng)度等力學(xué)參數(shù)的相關(guān)性模型,并研究了圍壓對(duì)巖石可鉆性的影響。巖石可鉆性研究成果為鉆頭選型、提高鉆進(jìn)速度提供了依據(jù)。
在煤炭行業(yè),早在20世紀(jì)90年代,有的學(xué)者就研究了煤系地層中巖石可鉆性分級(jí)的指標(biāo)體系及測(cè)試方法,并研制了野外巖石可鉆性測(cè)試儀器[30]。有的學(xué)者采用壓入硬度法和普氏硬度法對(duì)煤層可鉆性進(jìn)行了測(cè)試,并研究了壓入硬度與巖石抗壓強(qiáng)度、彈性模量和抗拉強(qiáng)度的相關(guān)關(guān)系,為全面了解煤層力學(xué)性質(zhì)提供了參考[31]。
上述巖石可鉆性研究成果主要是以石油天然氣鉆井工程、地質(zhì)鉆探工程為主,煤炭行業(yè)研究的較少,更缺乏針對(duì)巷道支護(hù)中錨桿、錨索鉆孔可鉆性的研究。對(duì)于錨桿、錨索鉆孔,2個(gè)極端條件是:① 煤巖體極破碎,成孔困難;② 巖石非常堅(jiān)硬,鉆孔速度很慢。在比較穩(wěn)定的煤層、軟及中等強(qiáng)度的巖層中,鉆孔速度比較快。因此,應(yīng)根據(jù)煤巷圍巖條件及錨桿、錨索鉆孔的特點(diǎn),研究煤巖體可鉆性,并制定分級(jí)標(biāo)準(zhǔn),以提高錨桿、錨索孔鉆進(jìn)速度。
5.3 圍巖的可錨性
圍巖的可錨性是評(píng)價(jià)錨桿、錨索在不同煤巖層中錨固性能的指標(biāo),只有可錨性滿足設(shè)計(jì)要求,巷道才能采用以錨桿、錨索為主的支護(hù)形式。國(guó)家標(biāo)準(zhǔn)《煤礦巷道錨桿支護(hù)技術(shù)規(guī)范》(GB/T 35056—2018)規(guī)定了采用短錨固錨桿拉拔試驗(yàn)測(cè)定圍巖的可錨性[32],在樹(shù)脂錨固長(zhǎng)度300 mm條件下的錨固力不低于100 kN。
影響錨桿錨固力的因素很多,包括桿體形狀與尺寸、鉆孔直徑及與桿體直徑的匹配性;錨固劑物理力學(xué)性質(zhì)、錨固長(zhǎng)度;圍巖強(qiáng)度與完整性,圍巖含水量、溫度及施工質(zhì)量等[33-34],其中圍巖條件是錨桿錨固力的重要影響因素。在掘進(jìn)施工前,應(yīng)對(duì)設(shè)計(jì)錨桿、錨索錨固范圍內(nèi)的各煤層、巖層進(jìn)行可錨性試驗(yàn),分析圍巖條件變化對(duì)可錨性的影響,確保錨桿、錨索支護(hù)的安全、可靠。
6 煤巷快速掘進(jìn)實(shí)現(xiàn)的技術(shù)途徑
如前所述,煤巖體的可掘性、圍巖穩(wěn)定性、圍巖可鉆性是影響掘進(jìn)速度的主要地質(zhì)因素,掘進(jìn)與支護(hù)工藝、參數(shù)、裝備是決定掘進(jìn)速度的生產(chǎn)因素。只有將巷道地質(zhì)與生產(chǎn)因素相互匹配,選擇合理的掘進(jìn)工藝、支護(hù)形式與參數(shù)及配套裝備,才能在保證巷道安全與支護(hù)效果的前提下實(shí)現(xiàn)快速掘進(jìn)、減人提效。
6.1 煤巷掘進(jìn)存在的問(wèn)題
(1)缺乏有效的臨時(shí)支護(hù)。臨時(shí)支護(hù)是割煤與錨桿支護(hù)的過(guò)渡過(guò)程,有效的臨時(shí)支護(hù)能為錨桿支護(hù)提供安全空間,為錨桿快速安裝創(chuàng)造有利條件。然而,目前的臨時(shí)支護(hù),包括前探梁、支柱加頂梁、機(jī)載臨時(shí)支護(hù)和交叉邁步式自移支架等,大多只起臨時(shí)防護(hù)作用,不能主動(dòng)支護(hù)圍巖,有效控制頂板早期離層;多數(shù)不能提供掘支平行作業(yè)所需的空間,而且反復(fù)支撐頂板、破壞煤巖層。此外,所有的臨時(shí)支護(hù)均沒(méi)有考慮對(duì)兩幫的支護(hù),導(dǎo)致煤幫破碎時(shí)正常掘進(jìn)非常困難。
(2)多數(shù)條件下,特別是采用懸臂式掘進(jìn)機(jī)掘進(jìn)時(shí),不能實(shí)現(xiàn)掘支平行作業(yè)。對(duì)于一般、不穩(wěn)定、極不穩(wěn)定圍巖條件,巷道掘出后要求及時(shí)支護(hù)頂板和兩幫,掘進(jìn)與支護(hù)反復(fù)交叉換位作業(yè),相互干擾,不能平行作業(yè),不能形成有效的作業(yè)線。
(3)現(xiàn)有樹(shù)脂錨桿、錨索施工工藝相對(duì)復(fù)雜、占用時(shí)間長(zhǎng)。錨桿安裝包括鋪聯(lián)網(wǎng)、安裝鋼帶、打孔、安裝錨固劑、攪拌錨固、預(yù)緊等多個(gè)環(huán)節(jié),很多工序需要人工操作,支護(hù)用時(shí)、用人均占總掘進(jìn)的60%以上,支護(hù)效率低下,嚴(yán)重制約了掘進(jìn)速度的提高。
(4)掘進(jìn)施工涉及掘進(jìn)機(jī)、錨桿鉆機(jī)、運(yùn)輸機(jī)等多個(gè)設(shè)備。一方面是單機(jī)自動(dòng)化程度低,如懸臂式掘進(jìn)機(jī)前進(jìn)方向、截割路徑、截割速度控制均依賴人工完成;多數(shù)掘進(jìn)工作面錨桿支護(hù)由人工操作的單體錨桿鉆機(jī)完成,還沒(méi)有完全實(shí)現(xiàn)機(jī)械化;另一方面是掘進(jìn)、支護(hù)、運(yùn)輸設(shè)備之間缺乏有效的通信手段,多機(jī)協(xié)同作業(yè)能力差。
(5)掘進(jìn)裝備可靠性較差、整體開(kāi)機(jī)率較低。掘進(jìn)裝備井下工作環(huán)境苛刻,工況復(fù)雜多變。國(guó)內(nèi)掘進(jìn)裝備可靠性較低、故障率高,導(dǎo)致有效的掘進(jìn)時(shí)間短、開(kāi)機(jī)率低。
6.2 提高煤巷掘進(jìn)速度的途徑
(1)確定適合的掘進(jìn)模式。在巷道圍巖地質(zhì)力學(xué)測(cè)試的基礎(chǔ)上,全面、詳細(xì)評(píng)價(jià)圍巖穩(wěn)定性、可掘性及可鉆性,進(jìn)而結(jié)合生產(chǎn)條件確定適合的掘進(jìn)模式是實(shí)現(xiàn)快速掘進(jìn)的必要條件。可根據(jù)表7,8的煤巷掘進(jìn)工作面圍巖穩(wěn)定性分類、可掘性分類,確定相應(yīng)的掘進(jìn)模式。對(duì)于非常穩(wěn)定、可掘性非常好的巷道,可采用先掘后支、掘支分離的模式,掘進(jìn)機(jī)完成截煤、運(yùn)輸作業(yè),滯后一定距離(10~20 m)進(jìn)行錨桿支護(hù),掘進(jìn)與支護(hù)相互不影響;對(duì)于穩(wěn)定、可掘性好的巷道,單巷掘進(jìn)可采用掘支平行、分次支護(hù)的模式,采用掘錨聯(lián)合機(jī)組完成掘進(jìn)和部分錨桿支護(hù)作業(yè),滯后的錨桿鉆車補(bǔ)齊全部支護(hù)。雙(多)巷掘進(jìn)可采用連續(xù)采煤機(jī)、錨桿鉆車交叉換位掘進(jìn)模式;對(duì)于一般條件巷道,在采用有效臨時(shí)支護(hù)、嚴(yán)格控制空頂和空幫距的條件下,可采用掘支平行、分次支護(hù)的模式;對(duì)于不穩(wěn)定、可掘性差的巷道,應(yīng)采用邊掘邊支、及時(shí)支護(hù)的掘進(jìn)模式,掘進(jìn)機(jī)掘出一個(gè)支護(hù)排距后需要立即支護(hù),并施加足夠的預(yù)應(yīng)力;對(duì)于極不穩(wěn)定、可掘性非常差的巷道,應(yīng)采用超前加固、隨掘隨支的掘進(jìn)模式,掘進(jìn)前需要加固破碎圍巖,為隨后的掘進(jìn)與支護(hù)提供空間,掘后必須立即支護(hù)。
(2)掘進(jìn)工藝優(yōu)化。掘進(jìn)作業(yè)需要多個(gè)工序完成,有些工序是串聯(lián)的,必須按先后順序完成,如掘進(jìn)機(jī)截煤完成后才能架設(shè)臨時(shí)支護(hù)、安裝錨桿,錨桿安裝過(guò)程是鉆孔、裝藥卷、插入桿體、攪拌藥卷、擰緊螺母等工序按先后順序進(jìn)行的。但是,有些工序是可以平行作業(yè)的,如部分掘錨聯(lián)合機(jī)組可實(shí)現(xiàn)割煤和支護(hù)同步進(jìn)行,頂板、兩幫多錨桿同時(shí)打設(shè),分次支護(hù)可實(shí)現(xiàn)前掘后支同步作業(yè)。掘進(jìn)工藝優(yōu)化主要包括三大內(nèi)容:① 盡量縮短每個(gè)工序的時(shí)間;② 盡量縮短串聯(lián)工序的銜接時(shí)間;③ 盡量使多工序能平行作業(yè)。與采煤工作面相比,掘進(jìn)工作面空間比較狹窄,給掘進(jìn)工藝優(yōu)化帶來(lái)很多困難。需要根據(jù)掘進(jìn)工作面圍巖條件,在時(shí)間與空間上綜合考慮,提出掘進(jìn)工藝時(shí)空優(yōu)化方案,實(shí)現(xiàn)安全、有效、快速掘進(jìn)。
(3)掘進(jìn)裝備優(yōu)選。根據(jù)被掘煤巖體物理力學(xué)性質(zhì)及變化選取合理的掘進(jìn)與支護(hù)裝備是快速掘進(jìn)的關(guān)鍵。對(duì)于可掘性非常好的煤巖體,可采用連續(xù)采煤機(jī)、掘錨一體機(jī)等全斷面一次掘進(jìn);對(duì)于可掘性差、非常差的煤巖體,連續(xù)采煤機(jī)、掘錨一體機(jī)等不能發(fā)揮優(yōu)勢(shì),則需要采用懸臂式掘進(jìn)機(jī)配合有效臨時(shí)支護(hù)的方式。當(dāng)遇到斷層、陷落柱、破碎帶等構(gòu)造時(shí),還需采用其他方法。錨桿鉆機(jī)需要根據(jù)圍巖的可鉆性進(jìn)行選擇,特別是在很破碎、很堅(jiān)硬的兩種極端條件下,錨桿鉆機(jī)及鉆具的選擇對(duì)錨桿安裝速度有很大的影響。另外,掘進(jìn)工作面用人多、頂板事故多發(fā),為實(shí)現(xiàn)少人、安全、高效,應(yīng)不斷提升掘進(jìn)設(shè)備的自動(dòng)化、信息化、智能化水平。
(4)支護(hù)形式與參數(shù)優(yōu)化。支護(hù)速度與錨桿及錨索安裝工藝、支護(hù)密度有很大關(guān)系,在保證巷道安全、支護(hù)效果的條件下,適當(dāng)降低支護(hù)密度,減少單位巷道長(zhǎng)度上的錨桿、錨索數(shù)量是提高支護(hù)速度的有效途徑。為此,錨桿支護(hù)設(shè)計(jì)應(yīng)遵循高強(qiáng)度、高剛度、高安全度、低支護(hù)密度的“三高一低”原則,通過(guò)采用高強(qiáng)度、高預(yù)應(yīng)力、全長(zhǎng)預(yù)應(yīng)力錨固錨桿與錨索支護(hù),實(shí)現(xiàn)支護(hù)的快速、高效。如對(duì)于前述數(shù)值模擬的巷道,每排頂板錨桿6根,幫錨桿8根,共14根/排。當(dāng)排距為0.8,0.9,1.0 m時(shí),支護(hù)密度分別為1.26,1.12,1.01根/m2;如果將每排頂板錨桿、幫錨桿數(shù)分別減少到5,6根,排距放大到1.2 m,則支護(hù)密度降低為0.66根/m2,是上述3種支護(hù)密度的0.52,0.59,0.65倍,單位巷道長(zhǎng)度錨桿數(shù)量大幅降低。
(5)掘進(jìn)全系統(tǒng)整體配套與協(xié)同。除了截割、支護(hù)環(huán)節(jié)外掘進(jìn)還包括超前探測(cè)、運(yùn)輸煤炭及支護(hù)材料、通風(fēng)、降塵等多個(gè)環(huán)節(jié),屬于系統(tǒng)工程。不僅要求每個(gè)環(huán)節(jié)能正常運(yùn)行,而且要求各環(huán)節(jié)、各工序、各設(shè)備之間應(yīng)有效銜接、相互聯(lián)動(dòng)、協(xié)同融合,形成一條龍配套的快速掘進(jìn)作業(yè)線,才能顯著提高掘進(jìn)速度。
7 煤巷掘進(jìn)的自動(dòng)化與智能化
提升掘進(jìn)自動(dòng)化、智能化水平是實(shí)現(xiàn)快速掘進(jìn)的有效途徑和發(fā)展方向。下面結(jié)合我國(guó)煤巷地質(zhì)與生產(chǎn)條件,圍巖穩(wěn)定性、可掘性、可鉆性及可錨性,提出煤巷掘進(jìn)自動(dòng)化、智能化技術(shù)總體架構(gòu),論述相關(guān)關(guān)鍵、核心技術(shù)。
7.1 掘進(jìn)自動(dòng)化、智能化總體架構(gòu)
掘進(jìn)自動(dòng)化、智能化包括智能感知、智能決策、自動(dòng)執(zhí)行3個(gè)要素[35-36]。掘進(jìn)自動(dòng)化、智能化總體架構(gòu)如圖24所示。掘進(jìn)工作面智能感知涉及3個(gè)層面:① 掘進(jìn)前進(jìn)行全面、系統(tǒng)的煤巖體地質(zhì)力學(xué)測(cè)試,在掘進(jìn)過(guò)程中進(jìn)行超前探測(cè)、隨掘探測(cè)、隨鉆測(cè)量,實(shí)現(xiàn)對(duì)掘進(jìn)工作面及配套系統(tǒng)“人-機(jī)-環(huán)”信息的全面感知,在此基礎(chǔ)上建立掘進(jìn)工作面動(dòng)態(tài)地質(zhì)模型,作為基礎(chǔ)環(huán)境;② 掘進(jìn)工作面環(huán)境的感知,實(shí)時(shí)監(jiān)測(cè)頂板離層、巷道變形、圍巖應(yīng)力、錨桿錨索支護(hù)體受力及瓦斯、粉塵質(zhì)量濃度等,監(jiān)測(cè)作業(yè)環(huán)境動(dòng)態(tài)變化;③ 設(shè)備感知,實(shí)時(shí)監(jiān)測(cè)截割動(dòng)載、截割軌跡、錨桿錨索鉆機(jī)扭矩、推力等信息,記錄設(shè)備工況并進(jìn)行故障診斷,監(jiān)測(cè)設(shè)備的位置、姿態(tài)信息,實(shí)現(xiàn)設(shè)備的行走導(dǎo)航與各功能動(dòng)作定位感知。感知信息通過(guò)高網(wǎng)速傳輸系統(tǒng)傳送至智能掘進(jìn)自主決策平臺(tái),通過(guò)該平臺(tái)進(jìn)行多源異構(gòu)數(shù)據(jù)的格式統(tǒng)一、通信協(xié)議轉(zhuǎn)換。
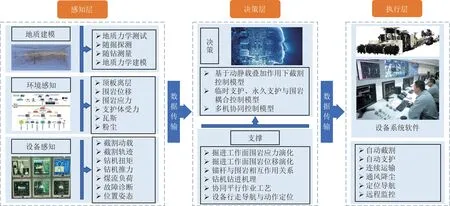
圖24 掘進(jìn)智能化總體架構(gòu)Fig.24 Overall framework for intelligence heading system
基于感知層數(shù)據(jù),獲得煤巷掘進(jìn)工作面圍巖穩(wěn)定性、可掘性、可鉆性、可錨性特征,掘進(jìn)工作面圍巖應(yīng)力場(chǎng)與位移場(chǎng)動(dòng)態(tài)演化規(guī)律,確定掘進(jìn)、支護(hù)、運(yùn)輸?shù)葏f(xié)同平行作業(yè)模式與工藝。以上述數(shù)據(jù)為支撐,以下位傳輸?shù)膭?dòng)態(tài)數(shù)據(jù)為依據(jù),建立基于掘進(jìn)工作面動(dòng)靜載疊加作用下截割控制模型,臨時(shí)支護(hù)、永久支護(hù)與圍巖耦合控制模型,探、掘、支、運(yùn)等多機(jī)協(xié)同控制模型,進(jìn)行控制邏輯自主決策,為自動(dòng)執(zhí)行提供依據(jù)。
基于決策層控制邏輯,在執(zhí)行層進(jìn)行掘進(jìn)工作面各設(shè)備系統(tǒng)的導(dǎo)航定位、截割、支護(hù)、運(yùn)輸、通風(fēng)、降塵等動(dòng)作,動(dòng)作結(jié)果通過(guò)自主感知反饋至自主決策平臺(tái),對(duì)巷道掘進(jìn)各工序作業(yè)進(jìn)行實(shí)時(shí)監(jiān)控、決策,對(duì)各動(dòng)作進(jìn)行執(zhí)行與修正,形成閉環(huán)控制。
7.2 掘進(jìn)工作面自動(dòng)化、智能化關(guān)鍵技術(shù)
7.2.1 自動(dòng)化、智能化截割技術(shù)
煤巷截割時(shí)間占總掘進(jìn)時(shí)間通常少于30%,截割過(guò)程僅需要一名掘進(jìn)機(jī)司機(jī),截割不是影響掘進(jìn)智能化的主要制約因素。目前已經(jīng)能夠?qū)崿F(xiàn)一鍵啟停、地面遠(yuǎn)程視頻遙控等自動(dòng)化控制。要實(shí)現(xiàn)更高層次的自動(dòng)化、智能化,應(yīng)進(jìn)一步深入研究低擾動(dòng)截割、截割動(dòng)載識(shí)別與控制、截割軌跡自動(dòng)規(guī)劃等技術(shù)。
首先必須考慮巷道圍巖條件,開(kāi)發(fā)低擾動(dòng)截割技術(shù),通過(guò)優(yōu)化截齒結(jié)構(gòu)與布置方式,減少截割擾動(dòng)對(duì)圍巖穩(wěn)定性影響。開(kāi)展不同工況下截割實(shí)驗(yàn)室試驗(yàn),可建立1∶1比例相似模型,深入研究不同煤巖層條件下截割擾動(dòng)影響規(guī)律。開(kāi)展井下現(xiàn)場(chǎng)原位截割測(cè)試研究,通過(guò)大量測(cè)試與統(tǒng)計(jì)數(shù)據(jù),獲得不同截割方式對(duì)掘進(jìn)工作面圍巖擾動(dòng)影響規(guī)律。
開(kāi)發(fā)截割動(dòng)載荷識(shí)別技術(shù)與截割轉(zhuǎn)速交流變頻調(diào)速控制技術(shù),實(shí)現(xiàn)不同工況下截割參數(shù)自動(dòng)調(diào)節(jié),包括截割轉(zhuǎn)速、單刀力、牽引速度和截割深度等參數(shù),實(shí)現(xiàn)電機(jī)輸出轉(zhuǎn)速、扭矩與破巖效果匹配,提高截割對(duì)不同煤巖層條件的適應(yīng)性。
開(kāi)發(fā)截割巖石動(dòng)載荷數(shù)據(jù)提取及識(shí)別技術(shù),實(shí)現(xiàn)對(duì)截割載荷信號(hào)的傳輸及特征提取,并配套研發(fā)大容量、高速采集、存貯及數(shù)據(jù)處理技術(shù),實(shí)現(xiàn)載荷信息的實(shí)時(shí)分析,并建立各參數(shù)匹配關(guān)系,實(shí)現(xiàn)現(xiàn)場(chǎng)截割過(guò)程中自動(dòng)調(diào)整截割參數(shù)來(lái)適應(yīng)工況的變化。
截割軌跡的自動(dòng)規(guī)劃目前已開(kāi)展大量的研究,應(yīng)進(jìn)一步在掘進(jìn)裝備運(yùn)動(dòng)學(xué)模型的基礎(chǔ)上,以掘進(jìn)裝備機(jī)身為測(cè)量基準(zhǔn),在掘進(jìn)裝備導(dǎo)航定位基礎(chǔ)上,以慣性空間為基準(zhǔn),配套相應(yīng)監(jiān)測(cè)技術(shù),開(kāi)發(fā)與掘進(jìn)工作面圍巖穩(wěn)定性相匹配的截割軌跡自動(dòng)規(guī)劃算法及控制技術(shù)。
7.2.2 臨時(shí)支護(hù)技術(shù)
巷道掘進(jìn)后隨著應(yīng)力釋放,圍巖會(huì)出現(xiàn)離層、破壞,導(dǎo)致圍巖自穩(wěn)能力差,甚至發(fā)生冒頂、片幫。不同類別的巷道圍巖對(duì)臨時(shí)支護(hù)的需求不同。對(duì)于易冒頂、片幫的圍巖,臨時(shí)支護(hù)尤為重要。如前所述,現(xiàn)有的多數(shù)掘進(jìn)工作面臨時(shí)支護(hù)不能滿足快速掘進(jìn)的要求,需要探索新型臨時(shí)支護(hù)技術(shù),保障掘進(jìn)工作面空頂、空幫范圍內(nèi)圍巖的穩(wěn)定性,為錨桿安裝提供較大的作業(yè)空間。臨時(shí)支護(hù)的發(fā)展主要有2個(gè)方向:① 改進(jìn)現(xiàn)有臨時(shí)支護(hù)裝置,根據(jù)掘進(jìn)工作面圍巖條件開(kāi)發(fā)與之相匹配的臨時(shí)支護(hù)結(jié)構(gòu)及自適應(yīng)控制技術(shù),提高對(duì)圍巖的適應(yīng)能力,減少對(duì)圍巖的反復(fù)支撐,提高臨時(shí)支護(hù)效果;② 改變現(xiàn)有臨時(shí)支護(hù)方式,提出快速噴涂臨時(shí)支護(hù)技術(shù)(圖25),采用快速凝固噴涂材料,配套自動(dòng)化高效噴涂設(shè)備,在巷道表面形成高強(qiáng)度、高韌性護(hù)表噴層,起到臨時(shí)支護(hù)的作用,同時(shí)可防止煤巖體風(fēng)化,并替代金屬網(wǎng)。
7.2.3 自動(dòng)化錨桿施工技術(shù)
目前廣泛采用的樹(shù)脂錨桿的安裝工藝流程如圖26所示,包括:鋪聯(lián)網(wǎng)、安裝鋼帶等護(hù)表構(gòu)件、鉆孔、卸鉆桿、安裝錨固劑、安裝錨桿、攪拌錨固劑、擰緊螺母等多道工序。如前所述,由于工序復(fù)雜、自動(dòng)化水平低,占去了60%以上的時(shí)間與人員。因此要實(shí)現(xiàn)快速掘進(jìn),錨桿支護(hù)的自動(dòng)化、智能化是關(guān)鍵技術(shù)。
圍繞錨桿施工自動(dòng)化、智能化主要有2個(gè)方向,一是基于傳統(tǒng)錨桿施工工藝進(jìn)行自動(dòng)化改進(jìn),例如中國(guó)煤炭科工集團(tuán)太原研究院通過(guò)高壓氣體將樹(shù)脂錨固劑送入孔中,并研發(fā)了自動(dòng)鉆孔、輸送錨固劑、自動(dòng)安裝錨桿的臺(tái)車。景隆重工機(jī)械有限公司在錨桿前方安裝塑料套筒,將錨桿與錨固劑聯(lián)結(jié)為一體,通過(guò)錨桿將錨固劑送入孔中,研制出鉆孔、安裝錨固劑并預(yù)緊的自動(dòng)化錨桿臺(tái)車,設(shè)置專門的錨桿存儲(chǔ)機(jī)構(gòu)。上述技術(shù)實(shí)現(xiàn)了鉆孔、輸送錨固劑、安裝錨桿、攪拌及預(yù)緊的自動(dòng)作業(yè),但沒(méi)有改變錨桿施工工藝,錨桿施工用時(shí)與人工相比并沒(méi)有縮短,且對(duì)塌孔、錨固劑入孔困難、因圍巖片落引起的錨桿外露超長(zhǎng)等問(wèn)題難以解決,抗干擾能力差。
錨桿自動(dòng)化施工的另一個(gè)方向是對(duì)傳統(tǒng)施工工藝進(jìn)行改變,開(kāi)發(fā)出新型鉆錨一體化錨桿及配套施工工藝,以高強(qiáng)度無(wú)縫鋼管為桿體,前端鑲嵌一次性鉆頭,錨桿作為鉆桿在鉆箱帶動(dòng)下逆時(shí)針旋轉(zhuǎn)打孔鉆進(jìn),順時(shí)針旋轉(zhuǎn)擰緊螺母進(jìn)行預(yù)緊。研發(fā)出新型觸變性錨注材料,由A,B兩組分組成,1∶1混合均勻后具有觸變性。該錨注材料通過(guò)泵注進(jìn)入錨桿尾部混合,自鉆頭流入鉆孔,充填錨桿與鉆孔間的環(huán)形空隙。停止泵送后,錨固劑觸變特性可使錨固劑克服重力作用不沿鉆孔流動(dòng),從而實(shí)現(xiàn)端錨至全長(zhǎng)錨固任意長(zhǎng)度錨固。選用高扭矩、高轉(zhuǎn)速液壓馬達(dá),實(shí)現(xiàn)了錨桿高扭矩預(yù)緊。該鉆錨一體化錨桿實(shí)現(xiàn)了鉆孔、注錨、預(yù)緊工序由同一機(jī)構(gòu)完成,避免了施工機(jī)具的反復(fù)切換,同時(shí)節(jié)省了拆卸鉆桿的時(shí)間,施工效率明顯提高。克服了塌孔、錨固劑難以輸送、圍巖片落引起的錨桿外露超長(zhǎng)等問(wèn)題導(dǎo)致錨桿安裝失敗。基于鉆錨一體化錨桿施工工藝,開(kāi)發(fā)出“一鍵打錨桿”控制系統(tǒng),實(shí)現(xiàn)了錨桿自動(dòng)化快速施工。井下試驗(yàn)數(shù)據(jù)表明:單根錨桿施工時(shí)間不超過(guò)2 min,施工速度提高1倍。
7.2.4 超前探測(cè)技術(shù)
掘進(jìn)工作面探測(cè)是巷道掘進(jìn)必要的安全保障,目前主要采用物探、鉆探結(jié)合的方法。物探主要采用槽波、地震波對(duì)掘進(jìn)構(gòu)造進(jìn)行超前探測(cè),采用瞬變電磁進(jìn)行超前探水[37]。物探需要停止掘進(jìn)作業(yè),布設(shè)信號(hào)發(fā)射、接收裝置,影響正常掘進(jìn)。由于掘進(jìn)工作面空間有限信號(hào)收發(fā)裝置無(wú)法按照理想條件布設(shè),一定程度上影響了物探的精度。另外,還開(kāi)發(fā)了基于掘進(jìn)機(jī)隨掘震源的巷道前方構(gòu)造探測(cè)技術(shù)[38],以掘進(jìn)機(jī)切割煤壁和巖石時(shí)產(chǎn)生的地震波作為震源,通過(guò)連續(xù)采集地震波并從中尋找反射波實(shí)現(xiàn)巷道超前探測(cè)。鉆探是最可靠的超前探測(cè)手段,隨著掘進(jìn)裝備集成化程度提高,整機(jī)裝備體積增大,鉆探與掘進(jìn)裝備換位困難,超前鉆探逐步成為影響巷道快速掘進(jìn)的重要因素。為實(shí)現(xiàn)便捷的超前鉆探,研發(fā)了掘探一體化的裝備[39],包括基于懸臂式掘進(jìn)機(jī)的掘探裝備、基于掘錨一體機(jī)的掘探裝備,通過(guò)將超前液壓鉆機(jī)集成于掘進(jìn)機(jī)、掘錨一體機(jī)上避免了掘探換位作業(yè)。
為了解決隨掘隨探存在的問(wèn)題,中國(guó)煤炭科工集團(tuán)西安研究院提出區(qū)域探測(cè)技術(shù)方案,在掘進(jìn)前利用千米定向鉆機(jī)一次性完成整條巷道的鉆探,通過(guò)鉆孔物探一次性完成擬開(kāi)掘巷道周圍區(qū)域的物探,并開(kāi)發(fā)出物探與鉆探相結(jié)合的綜合探測(cè)技術(shù),實(shí)現(xiàn)了“探測(cè)先行、掘探分離”,消除了超前探測(cè)對(duì)掘進(jìn)的影響。
7.2.5 定位與導(dǎo)航技術(shù)
定位與導(dǎo)航技術(shù)是掘進(jìn)工作面裝備實(shí)現(xiàn)自動(dòng)化、智能化的重要技術(shù),包括掘進(jìn)裝備行走的定位導(dǎo)航和錨桿支護(hù)的定位等。
掘進(jìn)裝備行走定位導(dǎo)航現(xiàn)有陀螺慣導(dǎo)、激光指引、全站儀測(cè)量、超寬帶定位等單一導(dǎo)航設(shè)備和方法,難以滿足強(qiáng)振動(dòng)、高濕度等掘進(jìn)工作面環(huán)境工況。定位導(dǎo)航有2個(gè)發(fā)展趨勢(shì):① 提高現(xiàn)有導(dǎo)航技術(shù)的精度,② 采用多傳感器測(cè)試、數(shù)據(jù)融合方法與技術(shù)[40],將具有不同特點(diǎn)多種導(dǎo)航傳感器、位姿檢測(cè)方法進(jìn)行組合,充分發(fā)揮各自特點(diǎn)與優(yōu)勢(shì),實(shí)現(xiàn)高效、精確導(dǎo)航。組合導(dǎo)航技術(shù)包括:超聲波和慣性導(dǎo)航組合、機(jī)器視覺(jué)和慣性導(dǎo)航組合、激光標(biāo)靶和傾角傳感器的組合、全站儀與慣性導(dǎo)航組合等多種方式。另外掘進(jìn)行走的定位還應(yīng)根據(jù)實(shí)際掘進(jìn)成型的巷道為基準(zhǔn),進(jìn)行相對(duì)定位,在掘進(jìn)裝備前方和兩側(cè)布設(shè)測(cè)距雷達(dá),計(jì)算掘進(jìn)裝備與煤壁距離,判斷掘進(jìn)裝備的位置和角度偏差。
錨桿支護(hù)定位目前有多種方式,首先可根據(jù)錨桿設(shè)計(jì)間排距進(jìn)行定位。以掘錨一體機(jī)為例,掘進(jìn)裝備按固定排距行走,錨桿鉆臂與掘進(jìn)裝備保持同步,通過(guò)示教技術(shù),錨桿鉆臂按錨桿間排距以示教路徑進(jìn)行定位施工錨桿。錨桿支護(hù)還可采用基于深度學(xué)習(xí)的目標(biāo)檢測(cè)技術(shù)定位,例如以已支護(hù)完成的錨桿托板為目標(biāo)進(jìn)行深度學(xué)習(xí)目標(biāo)檢測(cè)(圖27),采用卷積神經(jīng)網(wǎng)絡(luò)對(duì)錨桿托板進(jìn)行特征提取,根據(jù)所提取到卷積神經(jīng)網(wǎng)絡(luò)特征對(duì)目標(biāo)的坐標(biāo)和大小等信息進(jìn)行回歸預(yù)測(cè),根據(jù)已支護(hù)錨桿托板的位置坐標(biāo),來(lái)判定下一個(gè)循環(huán)錨桿安裝位置。在井下巷道中經(jīng)常會(huì)出現(xiàn)局部漏頂、片幫情況,應(yīng)以冒頂、片幫后的煤巖表面為基準(zhǔn),否則達(dá)不到預(yù)期的鉆孔深度,這就要求錨桿鉆機(jī)能實(shí)時(shí)根據(jù)工況調(diào)整鉆進(jìn)深度。可通過(guò)基于視覺(jué)傳感的錨桿支護(hù)實(shí)時(shí)位姿解算(圖28,其中,β為錨桿鉆機(jī)與垂直方向的角度;d為錨桿鉆機(jī)至錨桿孔打設(shè)位置的距離),對(duì)漏頂、片幫不同畸變特征圖像進(jìn)行檢測(cè),判斷漏頂、片幫深度,從而實(shí)時(shí)調(diào)整錨桿鉆機(jī)的作業(yè)位姿補(bǔ)償量,及時(shí)補(bǔ)償現(xiàn)場(chǎng)工況改變?cè)斐傻闹ёo(hù)參數(shù)變化,提高錨桿支護(hù)定位的準(zhǔn)確性。
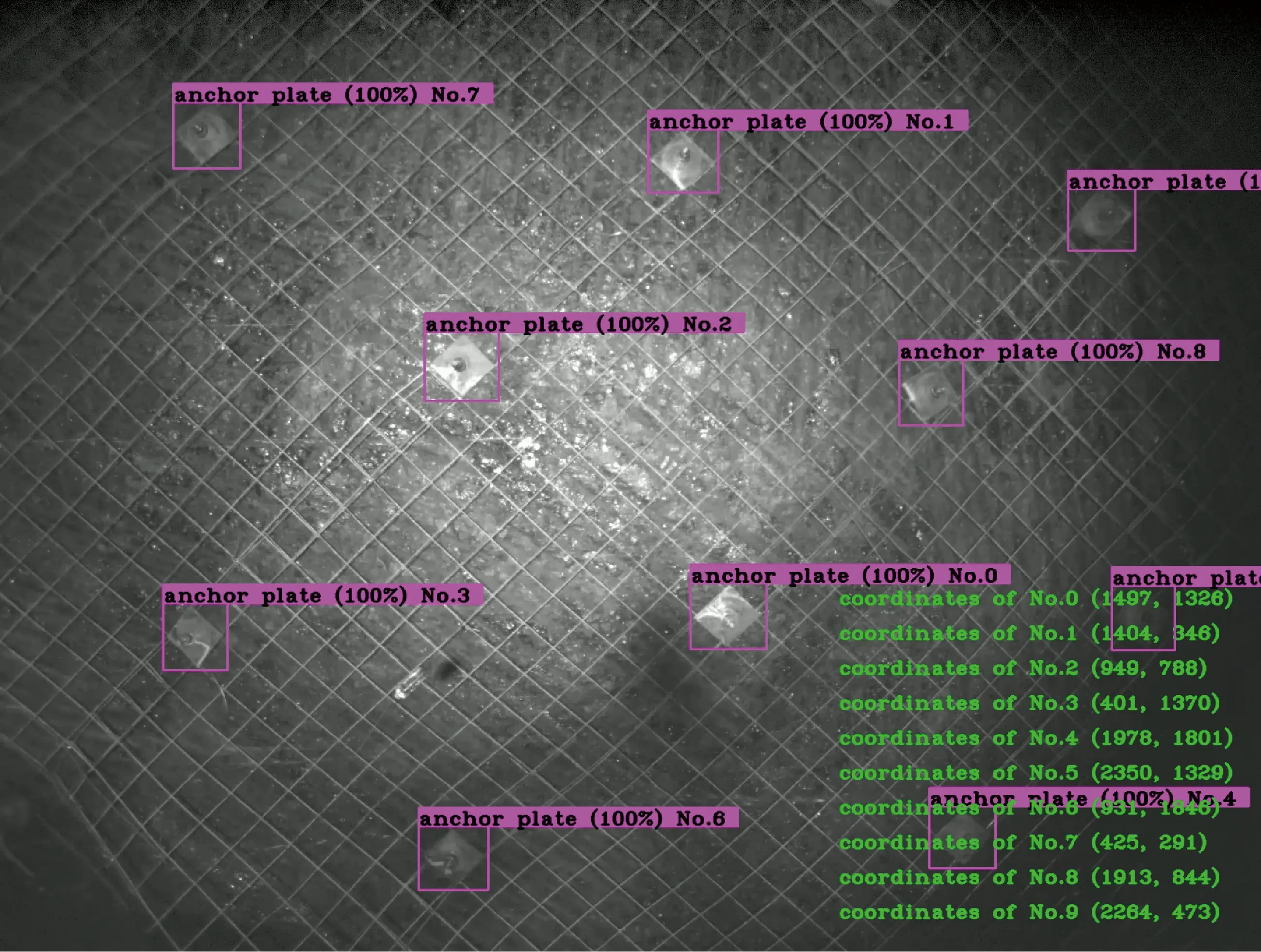
圖27 基于深度學(xué)習(xí)的錨桿托板檢測(cè)Fig.27 Detection of bolt plates based on deep learning
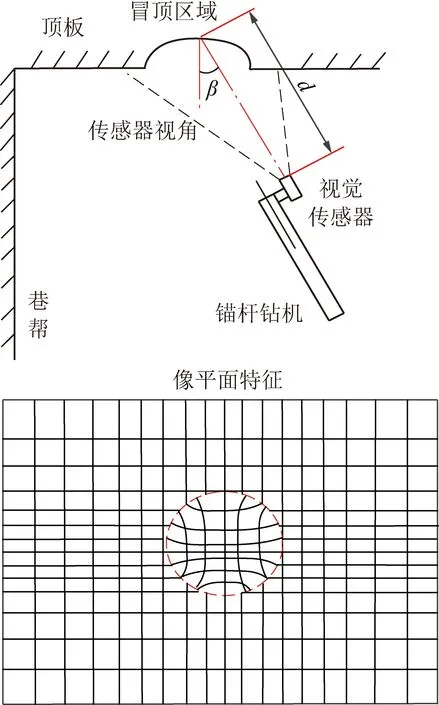
圖28 基于視覺(jué)傳感的錨桿實(shí)時(shí)位姿解算原理示意Fig.28 Schematic diagram of real-time pose calculation principle of rock bolt based on visual sensing
7.2.6 圍巖穩(wěn)定性與環(huán)境監(jiān)測(cè)及大數(shù)據(jù)分析
掘進(jìn)工作面及巷道圍巖穩(wěn)定性監(jiān)測(cè)可為掘進(jìn)自動(dòng)化、智能化提供重要基礎(chǔ)數(shù)據(jù)。掘進(jìn)工作面周圍瓦斯、粉塵質(zhì)量濃度、溫度等參數(shù)的實(shí)時(shí)監(jiān)測(cè)與分析,是保障巷道安全的必要條件。
圍巖穩(wěn)定性監(jiān)測(cè)內(nèi)容主要包括圍巖應(yīng)力、位移、離層、破壞監(jiān)測(cè),支護(hù)體受力、變形、破壞監(jiān)測(cè)。現(xiàn)有圍巖穩(wěn)定性監(jiān)測(cè)技術(shù)主要存在3個(gè)問(wèn)題:① 通過(guò)在巷道中布置測(cè)站進(jìn)行某一斷面的監(jiān)測(cè),監(jiān)測(cè)點(diǎn)固定,代表性差,難以反映全長(zhǎng)巷道圍巖的穩(wěn)定性;② 監(jiān)測(cè)實(shí)時(shí)性差,監(jiān)測(cè)頻率低,監(jiān)測(cè)特征點(diǎn)少,例如巷道表面位移監(jiān)測(cè)十字布點(diǎn)法只能反映頂、底、兩幫4個(gè)特征點(diǎn)變化數(shù)據(jù),無(wú)法滿足巷道全斷面監(jiān)測(cè)的需求;③ 監(jiān)測(cè)多集中在巷道永久支護(hù)段,監(jiān)測(cè)儀器多需要打孔安裝,施工繁瑣,缺少可供掘進(jìn)設(shè)備搭載的隨掘監(jiān)測(cè)技術(shù),無(wú)法反映掘進(jìn)工作面圍巖穩(wěn)定性隨掘變化規(guī)律。
隨著計(jì)算機(jī)圖像識(shí)別與處理技術(shù)的發(fā)展,激光掃描測(cè)量技術(shù)與視覺(jué)測(cè)量技術(shù)等非接觸式測(cè)量方法可應(yīng)用于巷道圍巖變形監(jiān)測(cè)[41-42]。圖29為巷道表面三維激光掃描點(diǎn)云分布,精度達(dá)到毫米級(jí),能夠滿足巷道變形監(jiān)測(cè)的需求。另外探索研發(fā)了隨掘關(guān)鍵特征點(diǎn)雙目視覺(jué)監(jiān)測(cè)技術(shù),隨掘過(guò)程中每隔一定排距在巷道頂板和兩幫布置若干反光輔助特征點(diǎn),掘進(jìn)設(shè)備上安裝立體視覺(jué)相機(jī)實(shí)時(shí)監(jiān)測(cè)特征點(diǎn)之間的相對(duì)距離,可實(shí)現(xiàn)兩幫和頂板相對(duì)變形量的實(shí)時(shí)監(jiān)測(cè),用于判斷頂板的相對(duì)下沉量,并可根據(jù)該數(shù)據(jù)的實(shí)時(shí)反饋,實(shí)現(xiàn)掘進(jìn)工作面支護(hù)參數(shù)的動(dòng)態(tài)調(diào)整。

圖29 巷道三維激光掃描點(diǎn)云分布Fig.29 Distribution of 3D laser scanning point cloud in roadway
由于圍巖條件的復(fù)雜性、多變性,單一監(jiān)測(cè)很難客觀評(píng)價(jià)圍巖穩(wěn)定性。采用多傳感器、多信息融合技術(shù)才能對(duì)圍巖穩(wěn)定性進(jìn)行全面、系統(tǒng)、可靠的評(píng)價(jià)。同時(shí)基于大量井下實(shí)測(cè)數(shù)據(jù),建立掘進(jìn)工作面及全長(zhǎng)巷道圍巖穩(wěn)定性監(jiān)測(cè)數(shù)據(jù)庫(kù),開(kāi)發(fā)圍巖穩(wěn)定性監(jiān)測(cè)數(shù)據(jù)云平臺(tái),通過(guò)大數(shù)據(jù)分析實(shí)時(shí)評(píng)價(jià)圍巖穩(wěn)定性及支護(hù)設(shè)計(jì)的合理性,為自動(dòng)化、智能化掘進(jìn)與支護(hù)提供數(shù)據(jù)支撐。
巷道掘進(jìn)過(guò)程中會(huì)涌出瓦斯、產(chǎn)生粉塵,影響掘進(jìn)工作面的安全和礦工職業(yè)健康,特別是對(duì)于高瓦斯煤層,瓦斯還顯著影響巷道掘進(jìn)速度。應(yīng)研究不同圍巖條件、不同截割方式下掘進(jìn)工作面瓦斯、粉塵質(zhì)量濃度隨掘進(jìn)的變化規(guī)律,建立通風(fēng)量、瓦斯體積分?jǐn)?shù)、粉塵質(zhì)量濃度、粉塵顆粒分布等各參量之間的動(dòng)態(tài)數(shù)據(jù)模型,實(shí)時(shí)分析監(jiān)測(cè)數(shù)據(jù),快速、準(zhǔn)確識(shí)別掘進(jìn)工作面周圍瓦斯、粉塵分布情況,實(shí)現(xiàn)隨掘過(guò)程中瓦斯、粉塵等工作面環(huán)境參數(shù)的準(zhǔn)確監(jiān)測(cè)與預(yù)警。
7.3 煤巷自動(dòng)化、智能化掘進(jìn)技術(shù)發(fā)展路徑
我國(guó)煤礦巷道圍巖地質(zhì)條件千差萬(wàn)別、復(fù)雜多變,掘進(jìn)技術(shù)與裝備發(fā)展很不均衡,發(fā)展掘進(jìn)自動(dòng)化、智能化技術(shù)不能“一刀切”,應(yīng)根據(jù)前述的圍巖穩(wěn)定性、可掘性、可鉆性、可錨性等條件,結(jié)合煤礦的具體情況,分條件、分類別、分區(qū)域、分步驟實(shí)施。
對(duì)于鄂爾多斯、陜北等礦區(qū)非常穩(wěn)定(Ⅰ類)、穩(wěn)定(Ⅱ類)圍巖條件,目前多數(shù)大型礦井的掘進(jìn)已實(shí)現(xiàn)機(jī)械化、部分實(shí)現(xiàn)自動(dòng)化,開(kāi)始向智能化邁進(jìn)。有些煤礦的掘進(jìn)速度已達(dá)到1 500~2 000 m/月,但掘進(jìn)工作面用人較多。① 應(yīng)重點(diǎn)攻關(guān)錨桿、錨索自動(dòng)化施工技術(shù),顯著減少用人、提高支護(hù)效率;同時(shí),提升掘進(jìn)定位導(dǎo)航技術(shù)、自動(dòng)截割技術(shù)、多機(jī)協(xié)同控制技術(shù),真正實(shí)現(xiàn)掘進(jìn)自動(dòng)化;② 應(yīng)突破智能感知、智能決策、自動(dòng)執(zhí)行的技術(shù)瓶頸,在掘進(jìn)工作面環(huán)境、圍巖穩(wěn)定性、裝備工況、全時(shí)空巷道礦壓監(jiān)測(cè)與感知及大數(shù)據(jù)分析技術(shù)的基礎(chǔ)上,建立掘進(jìn)與支護(hù)控制模型,提出相應(yīng)的算法和決策模型,形成以大數(shù)據(jù)支撐的動(dòng)態(tài)化、信息化、智能化快速掘進(jìn)技術(shù),實(shí)現(xiàn)快速、少人、高效。
對(duì)于我國(guó)大部分巷道圍巖條件(一般Ⅲ類、不穩(wěn)定Ⅳ類),目前多數(shù)煤礦實(shí)現(xiàn)了截煤機(jī)械化,部分達(dá)到自動(dòng)化程度,但支護(hù)主要依靠人工。此類條件需要經(jīng)歷全部機(jī)械化、自動(dòng)化到智能化的發(fā)展過(guò)程。① 需重點(diǎn)解決人工支護(hù)的問(wèn)題,研發(fā)新型機(jī)械化、自動(dòng)化臨時(shí)支護(hù)技術(shù),錨桿與錨索機(jī)械化、自動(dòng)化施工技術(shù),實(shí)現(xiàn)臨時(shí)支護(hù)與永久支護(hù)的快速施工;② 構(gòu)建掘支一體化系統(tǒng),提升掘進(jìn)與支護(hù)平行作業(yè)能力。開(kāi)發(fā)適用的掘錨一體機(jī),降低截割擾動(dòng),增強(qiáng)過(guò)地質(zhì)構(gòu)造的能力,掘進(jìn)全過(guò)程實(shí)現(xiàn)自動(dòng)化;③ 開(kāi)發(fā)掘進(jìn)環(huán)境、圍巖穩(wěn)定性、裝備工況、支護(hù)狀況感知系統(tǒng)及大數(shù)據(jù)分析技術(shù),根據(jù)Ⅲ類、Ⅳ類圍巖特點(diǎn)提出掘進(jìn)與支護(hù)控制模型、決策模型,實(shí)現(xiàn)掘進(jìn)的動(dòng)態(tài)化、信息化施工,逐步提升智能化水平。
對(duì)于圍巖穩(wěn)定性非常差(Ⅴ類)的巷道條件:① 應(yīng)開(kāi)展掘進(jìn)工作面地質(zhì)構(gòu)造超前探測(cè)技術(shù)研究,超前支護(hù)與加固技術(shù)、材料及裝備研發(fā),如超前深孔注漿技術(shù)、先卸壓后掘進(jìn)技術(shù)等,提高巷道圍巖的可掘性;② 開(kāi)展低擾動(dòng)截割技術(shù)研究,開(kāi)發(fā)鉆錨注一體化錨桿、錨索自動(dòng)化施工技術(shù),提高掘進(jìn)系統(tǒng)的機(jī)械化、自動(dòng)化水平;③ 開(kāi)展掘進(jìn)各工序的自動(dòng)化控制,掘進(jìn)環(huán)境、圍巖穩(wěn)定性實(shí)時(shí)監(jiān)測(cè),信息反饋、控制、執(zhí)行等技術(shù)研究,不斷提升掘進(jìn)自動(dòng)化、智能化水平。
8 結(jié) 論
(1)巷道開(kāi)挖后在掘進(jìn)工作面頂角和巷道四角周圍出現(xiàn)應(yīng)力集中區(qū),在工作面中部前方、后方的頂?shù)装搴蛢蓭椭胁砍霈F(xiàn)應(yīng)力降低區(qū);圍巖位移在超前工作面相當(dāng)于巷道寬度一半左右的位置開(kāi)始明顯增加。在剛開(kāi)挖的2 m范圍內(nèi),頂?shù)装逦灰菩 kS著遠(yuǎn)離掘進(jìn)工作面圍巖位移量不斷增大,達(dá)到2倍巷道寬度時(shí)基本穩(wěn)定;圍巖破壞范圍隨工作面不斷推進(jìn)發(fā)生變化。在剛開(kāi)挖的2 m范圍內(nèi)破壞范圍很小。隨著至掘進(jìn)工作面距離增加,頂板破壞深度不斷增大,在至掘進(jìn)工作面2倍巷道寬度時(shí)基本達(dá)到穩(wěn)定。
(2)影響掘進(jìn)工作面圍巖穩(wěn)定性的地質(zhì)力學(xué)因素主要有圍巖強(qiáng)度、地質(zhì)構(gòu)造、圍巖結(jié)構(gòu)及地應(yīng)力。煤層強(qiáng)度對(duì)巷道變形與破壞的影響十分顯著,高、低煤層強(qiáng)度下頂板下沉相差近1倍;層理對(duì)巷道頂板裂紋的產(chǎn)生和發(fā)育有一定影響,層理面越多,裂隙越發(fā)育;斷層對(duì)其附近巷道圍巖的裂隙場(chǎng)和位移場(chǎng)擴(kuò)展有促進(jìn)作用;隨著地應(yīng)力增大,圍巖變形與破壞顯著增加,當(dāng)巷道軸向與最大水平主應(yīng)力方向呈一定角度時(shí),呈現(xiàn)明顯的非對(duì)稱位移和破壞特征。
(3)掘進(jìn)參數(shù)包括巷道斷面形狀與參數(shù)、開(kāi)挖方式、空頂距、掘進(jìn)速度等,對(duì)掘進(jìn)工作面圍巖穩(wěn)定性均有影響。隨著巷道寬度增加,頂板破碎程度明顯增加。分步開(kāi)挖的頂板下沉量、頂板破壞程度明顯大于一次開(kāi)挖。空頂距對(duì)圍巖裂隙場(chǎng)的影響顯著,空頂距越大,圍巖裂隙越多、分布越廣。過(guò)快、過(guò)慢的掘進(jìn)速度對(duì)圍巖穩(wěn)定性均不利。
(4)掘進(jìn)工作面支護(hù)分為臨時(shí)支護(hù)和永久支護(hù)。掘進(jìn)后安裝及時(shí)、主動(dòng)、支護(hù)阻力大的臨時(shí)支護(hù)效果好,應(yīng)在較小的空頂距下及時(shí)安裝永久支護(hù)。分次支護(hù)由于部分錨桿和錨索支護(hù)不及時(shí),圍巖位移和裂隙場(chǎng)的擴(kuò)展均大于一次支護(hù)。通過(guò)分次支護(hù)提高掘進(jìn)速度是以影響錨桿、錨索支護(hù)效果為代價(jià)的,應(yīng)限定在一定的地質(zhì)和生產(chǎn)條件下,使得二次支護(hù)效果不受到過(guò)大影響。
(5)根據(jù)煤巷掘進(jìn)工作面空頂距及空頂時(shí)間,對(duì)煤巷掘進(jìn)工作面圍巖穩(wěn)定性進(jìn)行了分類。將煤巷圍巖穩(wěn)定性分為非常穩(wěn)定、穩(wěn)定、一般、不穩(wěn)定、極不穩(wěn)定等5類,并劃分了每類圍巖的空頂、空幫距及自穩(wěn)時(shí)間,提出了相應(yīng)的支護(hù)要求,為煤巷快速掘進(jìn)提供了基礎(chǔ)。
(6)掘進(jìn)速度與被截割煤巖體性質(zhì)有很大關(guān)系,據(jù)此提出煤巷可掘性的概念并進(jìn)行了分類。根據(jù)掘進(jìn)工作面煤層賦存條件、煤層強(qiáng)度與結(jié)構(gòu)及掘后穩(wěn)定性,將煤巷可掘性分為非常好、好、一般、差、非常差5類。分析了圍巖的可鉆性,指出應(yīng)充分研究煤巖體的可鉆性,并制定分級(jí)標(biāo)準(zhǔn),以提高錨桿、錨索孔鉆進(jìn)速度。分析了圍巖的可錨性及井下錨固煤巖層可錨性試驗(yàn)的重要性。
(7)目前我國(guó)煤巷掘進(jìn)存在的突出問(wèn)題為:缺乏有效的臨時(shí)支護(hù),不能實(shí)現(xiàn)掘支平行作業(yè);錨桿與錨索施工工藝復(fù)雜、人工操作、占用時(shí)間長(zhǎng);單機(jī)自動(dòng)化程度低,多機(jī)協(xié)同作業(yè)能力差;掘進(jìn)裝備可靠性差,整體開(kāi)機(jī)率較低。提高煤巷掘進(jìn)速度的主要途徑為:根據(jù)巷道條件確定適合的掘進(jìn)模式,優(yōu)化掘進(jìn)工藝,優(yōu)選掘進(jìn)裝備;確定合理的支護(hù)形式與參數(shù),適當(dāng)降低支護(hù)密度;掘進(jìn)全系統(tǒng)整體配套與協(xié)同。
(8)掘進(jìn)自動(dòng)化、智能化是實(shí)現(xiàn)快速掘進(jìn)的有效途徑。結(jié)合巷道圍巖穩(wěn)定性、可掘性、可鉆性及可錨性,提出煤巷掘進(jìn)自動(dòng)化、智能化技術(shù)總體架構(gòu),應(yīng)解決自動(dòng)化、智能化截割、臨時(shí)支護(hù)、自動(dòng)化錨桿施工、超前探測(cè)、定位與導(dǎo)航、圍巖穩(wěn)定性與環(huán)境監(jiān)測(cè)及大數(shù)據(jù)分析等關(guān)鍵技術(shù)。根據(jù)我國(guó)煤礦巷道地質(zhì)條件的復(fù)雜性、多變性及掘進(jìn)技術(shù)水平不平衡,提出煤巷自動(dòng)化、智能化掘進(jìn)技術(shù)的發(fā)展路徑。
猜你喜歡
山東冶金(2022年1期)2022-04-19 13:40:52
中華建設(shè)(2019年12期)2019-12-31 06:47:58
山東冶金(2019年1期)2019-03-30 01:34:56
江西建材(2018年4期)2018-04-10 12:37:22
中國(guó)房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:29
工程建設(shè)與設(shè)計(jì)(2016年4期)2016-02-27 10:51:09
煤炭學(xué)報(bào)(2015年10期)2015-12-21 01:55:09
山西煤炭(2015年4期)2015-12-20 11:36:18
江西煤炭科技(2015年1期)2015-11-07 03:06:32
中國(guó)鐵道科學(xué)(2015年5期)2015-06-21 06:53:18