基于合作目標(biāo)的單目視覺位姿估計(jì)*
2021-08-12 09:02:38范路生張靜遠(yuǎn)王為如吳佩璋
艦船電子工程 2021年7期
范路生 張靜遠(yuǎn) 王為如 吳佩璋
(1.海軍工程大學(xué) 武漢 430000)(2.中國船舶集團(tuán)有限公司第七一三研究所 鄭州 450015)
1 引言
在傳統(tǒng)物流行業(yè)中,叉車是一種工業(yè)的搬運(yùn)車輛,常常被用來裝卸、堆垛物品[2]。在新興的無人物流行業(yè)中,叉車自主叉取貨物可以節(jié)省大量的人力物力成本,提高效率[1],貨叉與貨叉孔的高精度相對位姿估計(jì)是叉車自主叉取貨物的關(guān)鍵問題。基于視覺的位姿估計(jì)具有精度高、成本低、非接觸、實(shí)時(shí)性高、位姿信息量豐富等突出優(yōu)點(diǎn)[3]。故本文提出了一種基于單目視覺的目標(biāo)相對六維位姿估計(jì)方法,用來計(jì)算貨叉與貨叉孔的相對六維位姿。
在現(xiàn)有的大多數(shù)基于視覺的位姿估計(jì)方法中,有兩個(gè)基本步驟:特征提取和位姿參數(shù)求解[4]。提取的特征分為合作目標(biāo)特征和非合作目標(biāo)特征兩大類,基于合作目標(biāo)特征的位姿估計(jì)方法需要在被測目標(biāo)物上設(shè)置一些幾何結(jié)構(gòu)信息已知且能夠在相機(jī)中完整清晰成像的合作標(biāo)志。人為設(shè)置的標(biāo)志點(diǎn)能大幅度提高目標(biāo)的檢測精度和位姿估計(jì)精度[5~6],具有結(jié)構(gòu)簡單、特征明顯、易于分辨以及測量精度高等優(yōu)點(diǎn)。常見的合作標(biāo)志包括十字、圓形、對角、Aruco碼等[7],相比于其他合作標(biāo)志,Aru?co碼角點(diǎn)可以提供豐富的位姿估計(jì)對應(yīng)信息,同時(shí)其內(nèi)部特有的二進(jìn)制編碼使得標(biāo)志在錯(cuò)誤檢查和修正方面保持一定的穩(wěn)定性。因此本文選擇Aruco碼作為合作標(biāo)志,布設(shè)在貨叉孔附近,相機(jī)布設(shè)在貨叉附近。
提取的合作目標(biāo)特征用于構(gòu)建2D-3D對應(yīng)關(guān)系,根據(jù)構(gòu)建的對應(yīng)關(guān)系實(shí)現(xiàn)位姿估計(jì)[4]。根據(jù)被測目標(biāo)的特征信息,分為基于點(diǎn)特征的位姿估計(jì)方法,基于直線特征的位姿估計(jì)方法,基于圓的位姿估計(jì)方法等。由于Aruco碼特征點(diǎn)信息豐富,本文解算方法利用的特征主要是特征點(diǎn)。
在已知相機(jī)內(nèi)參的情況下,由特征點(diǎn)與其像點(diǎn)的對應(yīng)關(guān)系求解目標(biāo)空間坐標(biāo)系相對于像機(jī)坐標(biāo)系的相對位姿關(guān)系就是經(jīng)典的PnP問題(Perspec?tive-N-Point),即N點(diǎn)透視問題[8]。PnP問題求解方法大致分為線性算法和非線性迭代算法兩類。P3P最多有4個(gè)解,Gao等通過吳方法[9]給出其完全解分類。Quan和Lan[10]對于P4P和P5P問題給出了線性SVD算法,他們把PnP問題轉(zhuǎn)化成多個(gè)P3P問題,算法計(jì)算復(fù)雜度為O(n5)。Fiore[11]提出了一種計(jì)算復(fù)雜度為O(n2)的線性算法,但對噪聲比較敏感。Moreno和Lepetit提出了一種計(jì)算復(fù)雜度為O(n)的高效、高精度線性算法EPnP[12],但經(jīng)過實(shí)驗(yàn)驗(yàn)證,EPnP算法對圖片的深度信息比較敏感,當(dāng)深度較小時(shí),該算法精度不高。另外一個(gè)典型的線性算法是直接線性變換(Direct Linear Transformation,DLT)算法[13],它將變換矩陣12個(gè)變量當(dāng)成獨(dú)立變量,忽略旋轉(zhuǎn)矩陣的正交約束,得到12個(gè)線性約束方程,當(dāng)特征點(diǎn)個(gè)數(shù)N≥6時(shí),該算法有唯一解。DLT算法計(jì)算速度快,但受噪聲影響較大,精度不高。經(jīng)典的非線性迭代算法是以最小化某種代價(jià)函數(shù)為目標(biāo),將位姿求解問題轉(zhuǎn)換為非線性最小二乘問題,利用Gauss-Newton法或者Levenberg-Mar?quardt法等非線性優(yōu)化算法進(jìn)行迭代求解。非線性迭代算法精度高,具有很高的抗噪聲性能,但該方法計(jì)算量遠(yuǎn)遠(yuǎn)大于線性算法,求解過程非常耗時(shí),對迭代的初值非常依賴。
本文提出了一種基于合作目標(biāo)特征點(diǎn)定位技術(shù)的位姿估計(jì)算法,可有效快速解算貨叉與貨叉孔的相對六維位姿,該算法先利用N(N≥6)個(gè)特征點(diǎn)通過DLT算法求解得到貨叉與貨叉孔相對位姿的初值,再將該值作為非線性迭代運(yùn)算的初值,使用重投影誤差來構(gòu)造代價(jià)函數(shù),經(jīng)過數(shù)次迭代,則可得到兩者高精度的六維位姿。
2 原理
2.1 視覺位姿估計(jì)模型
按照本實(shí)驗(yàn)構(gòu)建相機(jī)透視投影成像位姿估計(jì)模型[14],設(shè)相機(jī)坐標(biāo)系OC?XCYCZC,基準(zhǔn)坐標(biāo)系(貨叉坐標(biāo)系)O?XYZ,世界坐標(biāo)系(貨叉孔坐標(biāo)系)OW?XWYWZW,圖像坐標(biāo)系o?uv,坐標(biāo)系示意圖如圖1所示。
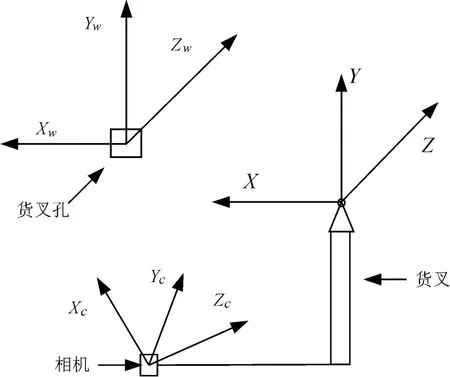
圖1 坐標(biāo)系示意圖
本文視覺位姿估計(jì)模型:

其中K表示像機(jī)內(nèi)參矩陣,[RC|TC]、[R|T]分別表示相機(jī)坐標(biāo)系相對于基準(zhǔn)坐標(biāo)系的旋轉(zhuǎn)平移矩陣、基準(zhǔn)坐標(biāo)系相對于世界坐標(biāo)系的旋轉(zhuǎn)平移矩陣,s是比例系數(shù),其值是一個(gè)常數(shù)。
由于像機(jī)鏡頭是由凹、凸透鏡及其組合構(gòu)成的,因此,成像平面不同區(qū)域?qū)饩€的彎曲程度也是不同的,從而造成圖像中實(shí)際點(diǎn)像素坐標(biāo)(x,y)與理想點(diǎn)像素坐標(biāo)(xcorr,ycorr)之間的像差,該像差會導(dǎo)致圖像出現(xiàn)徑向畸變和切向畸變,對像點(diǎn)產(chǎn)生的影響[15]可以描述為
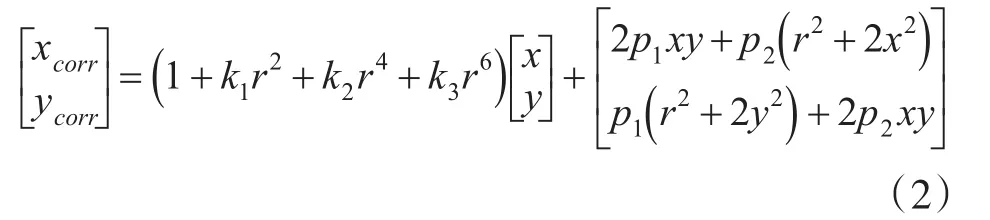
式中,r2=x2+y2,是像素點(diǎn)p到圖像中心的距離,k1、k2、k3是徑向畸變參數(shù),p1、p2是切向畸變參數(shù)。本文采用Matlab標(biāo)定工具箱對相機(jī)標(biāo)定,得到相機(jī)內(nèi)參fx、fy、cx、cy和畸變參數(shù)。將線性模型式(1)與像差模型式(2)組合起來構(gòu)成完整的針孔像機(jī)透視投影模型。
2.2 直接線性變換
根據(jù)針孔相機(jī)2D點(diǎn)到3D點(diǎn)齊次坐標(biāo)矢量的映射關(guān)系,本文定義投影矩陣M:

令u=[uv1]T,XW=[XWYWZW1]T,則式(1)可以簡化為:

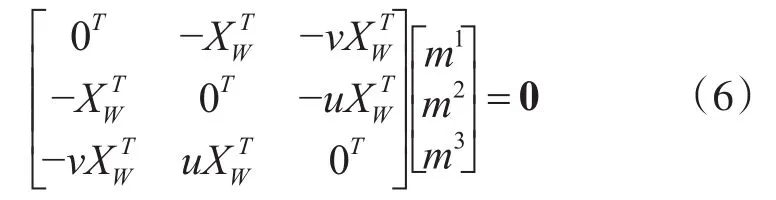
將投影矩陣M的第j行記作mjT,將矢量式su與MXW進(jìn)行叉乘運(yùn)算,可得到:
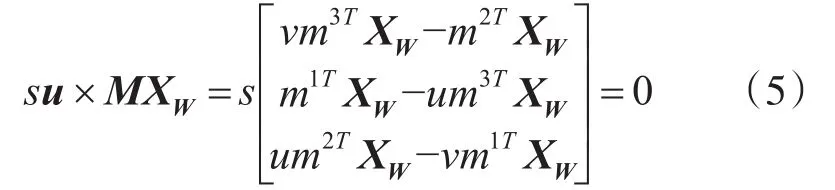
通過矩陣線性變換,化簡可得到關(guān)于M的三個(gè)方程:
忽略3×3旋轉(zhuǎn)矩陣R的正交約束,將其看作9個(gè)獨(dú)立變量,則M的每個(gè)元素都為獨(dú)立變量,依據(jù)矩陣秩的特性,通過推導(dǎo)得到兩個(gè)獨(dú)立方程,共有12個(gè)獨(dú)立未知變量,即基準(zhǔn)坐標(biāo)系相對于世界坐標(biāo)系的旋轉(zhuǎn)平移矩陣參數(shù)。
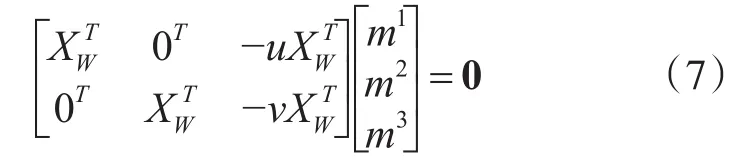
依據(jù)式(7),每個(gè)合作目標(biāo)特征點(diǎn)可提供兩個(gè)獨(dú)立方程,當(dāng)特征點(diǎn)的個(gè)數(shù)N≥6時(shí),理論中則可得到唯一解。
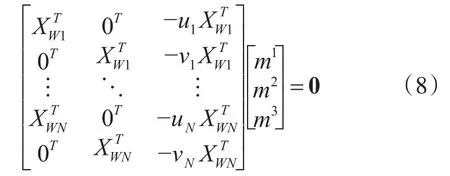
當(dāng)N>6時(shí),采用最小二乘的方式擬合得到12個(gè)獨(dú)立未知變量的值,求解得到基準(zhǔn)坐標(biāo)系相對于世界坐標(biāo)系的旋轉(zhuǎn)平移矩陣,即貨叉與貨叉孔的相對位姿的初值。通過實(shí)驗(yàn)驗(yàn)證,僅采用DLT求解得到的位姿精度較低,我們可以通過最小化重投影誤差來提高精度。
2.3 光束法平差模型優(yōu)化
BA(Bundle Adjustment),譯為光束法平差,其本質(zhì)是一個(gè)優(yōu)化模型,目的式最小化重投影誤差。重投影誤差是真實(shí)三維空間點(diǎn)在圖像平面上的投影ui(即圖像上的像素點(diǎn))和重投影vi(用3D點(diǎn)按照當(dāng)前計(jì)算到的投影矩陣進(jìn)行第二次投影計(jì)算得到的虛擬的像素點(diǎn))的差值。
圖2 重投影誤差
單個(gè)點(diǎn)的重投影誤差為

BA模型是將所有重投影誤差的和最小化:

針對BA模型的優(yōu)化算法有很多,本文采用非線性算法Gauss-Newton對上節(jié)求得的目標(biāo)間的相對位姿初值進(jìn)行優(yōu)化。結(jié)合位姿估計(jì)模型及求解式(7),本文利用特征點(diǎn)重投影誤差構(gòu)造代價(jià)函數(shù)Fui,F(xiàn)vi,通過多次非線性迭代優(yōu)化使其最小化,可使所有特征點(diǎn)的重投影誤差和的最小化。
依據(jù)旋轉(zhuǎn)平移矩陣[R|T]組成元素特性,設(shè)代價(jià)函數(shù)變量為各軸旋轉(zhuǎn)角度和平移距離,即pe=[Ax,Ay,Az,Tx,Ty,Tz]T,分別對代價(jià)函數(shù)Fui,F(xiàn)vi求一階偏導(dǎo)數(shù),則可得到雅可比矩陣:
Gauss-Newton算法是忽略代價(jià)函數(shù)的泰勒展開式二次項(xiàng)及多次項(xiàng):

考慮到重投影誤差ei=‖ui?vi‖ 的理想值為0,故我們直接令代價(jià)函數(shù)為0,則可以演化得到本文BA優(yōu)化模型:
通過最小二乘擬合,經(jīng)過數(shù)次運(yùn)算,可在δpe方向上迭代直到代價(jià)函數(shù)絕對值最小,得到貨叉與貨叉孔的高精度六維位姿。
3 實(shí)驗(yàn)
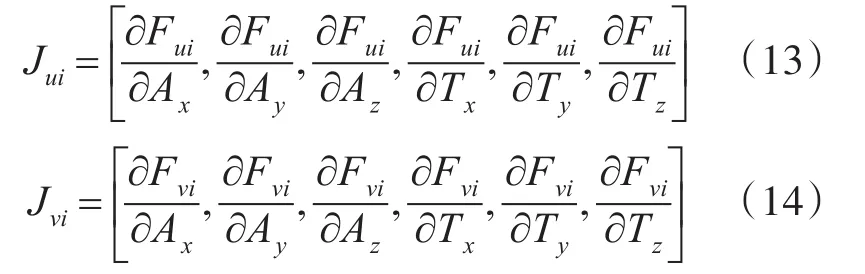
基于上章節(jié)算法原理,相機(jī)坐標(biāo)系相對于基準(zhǔn)坐標(biāo)系的旋轉(zhuǎn)平移矩陣[RC|TC]可通過調(diào)整基準(zhǔn)坐標(biāo)系與世界坐標(biāo)系完全重合,即將貨叉前端與貨叉孔前端完全重合,則可得到。視覺位姿估計(jì)實(shí)驗(yàn)設(shè)計(jì)如圖3所示。
圖3 視覺位姿估計(jì)實(shí)驗(yàn)流程圖
本文實(shí)驗(yàn)采用USB插孔的工業(yè)級紅外攝像機(jī),在實(shí)驗(yàn)過程中,貨叉前端距離貨叉孔前端景深距離為0.5m,相機(jī)距離合作目標(biāo)1.58m。相機(jī)采集圖像過程中,貨叉、貨叉孔、相機(jī)相對于地面保持靜止,經(jīng)過位姿解算,得到500組實(shí)驗(yàn)數(shù)據(jù),實(shí)驗(yàn)結(jié)果如下所示。
在本次實(shí)驗(yàn)中,本文得到了500組貨叉與貨叉孔相對六維位姿參數(shù)實(shí)驗(yàn)數(shù)據(jù),如圖4所示,經(jīng)過各參數(shù)實(shí)際值與估計(jì)的對比分析,我們可以得到,X軸平移距離Tx靜態(tài)誤差在2mm左右,動態(tài)誤差在[-0.1mm,4.1mm]區(qū)間,X軸旋轉(zhuǎn)角度Ax靜態(tài)誤差在0.05°左右,動態(tài)誤差在[-0.04°,0.12°]區(qū)間;Y軸平移距離Ty靜態(tài)誤差在-1.5mm左右,動態(tài)誤差在[0.9mm,-3.9mm]區(qū)間,Y軸旋轉(zhuǎn)角度Ay靜態(tài)誤差在0.06°左右,動態(tài)誤差在[0.1°,0.11°]區(qū)間;Z軸平移距離Tz靜態(tài)誤差在0mm左右,動態(tài)誤差在[-1.5mm,2mm]區(qū)間,Z軸旋轉(zhuǎn)角度Az靜態(tài)誤差在-0.06°左右,動態(tài)誤差在[-0.15°,0.05°]區(qū)間。
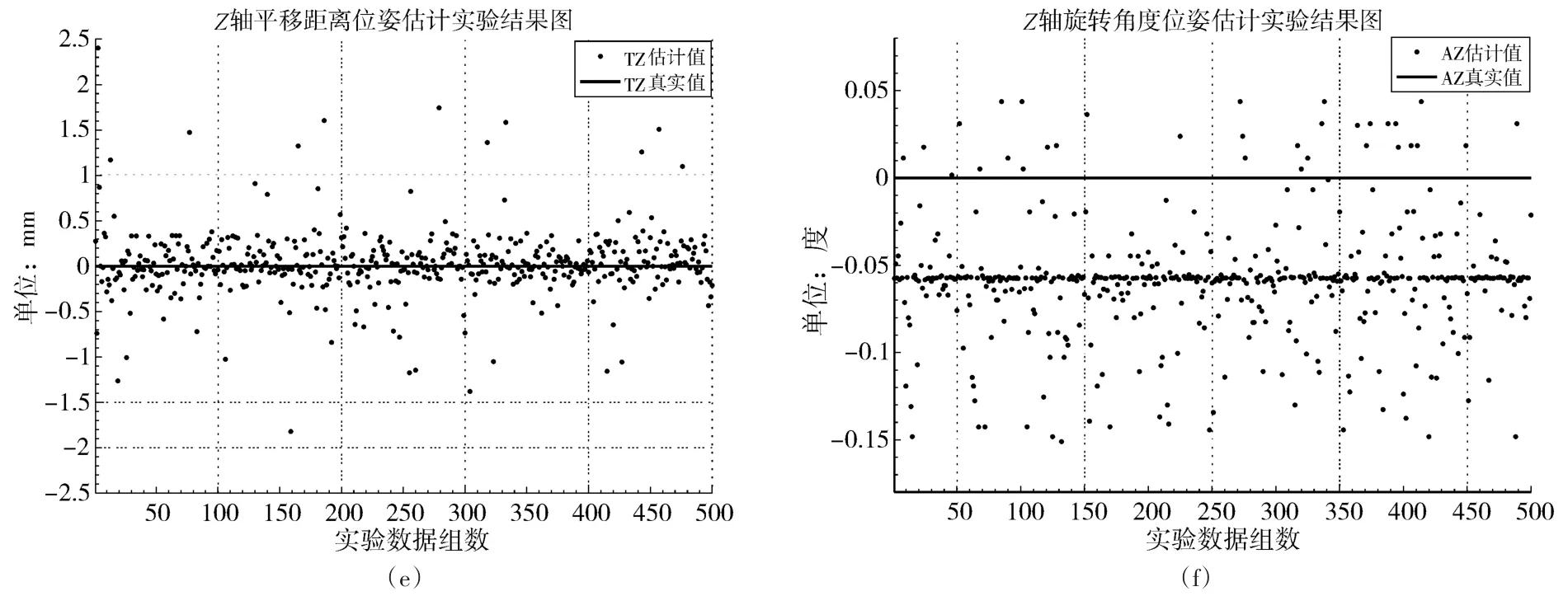
圖4 視覺位姿估計(jì)實(shí)驗(yàn)結(jié)果圖
經(jīng)過實(shí)驗(yàn)驗(yàn)證,在相機(jī)距離合作目標(biāo)景深距離1.58m,貨叉距離貨叉孔0.5m時(shí),本文位姿估計(jì)算法平移距離精度達(dá)到毫米級,旋轉(zhuǎn)角度精度在0.2°以內(nèi)。
4 結(jié)語
本文以至少六個(gè)共面合作目標(biāo)特征點(diǎn)定位技術(shù)求解貨叉與貨叉孔的相對位姿,基于針孔相機(jī)透視投影模型構(gòu)建視覺位姿估計(jì)模型,采用直接線性變換解算得到兩者相對位姿測量的初值,依據(jù)最小化重投影誤差的原則構(gòu)建代價(jià)函數(shù),并用Gauss-Newton非線性迭代算法對其進(jìn)行優(yōu)化,提高位姿估計(jì)精度。實(shí)驗(yàn)結(jié)果表明,在理想狀態(tài)下,平移距離誤差最大為4.8mm,旋轉(zhuǎn)角度誤差最大為0.2°。但同時(shí)我們也可以得到該算法估計(jì)值波動范圍較大,后期應(yīng)分析原因,增加濾波算法進(jìn)一步改進(jìn)優(yōu)化。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03