船舶行為的語義建模與表達
2021-08-11 01:04:28文元橋宋榮鑫黃亞敏隋忠義
哈爾濱工業大學學報 2021年8期
文元橋,宋榮鑫,黃 亮,黃亞敏,隋忠義,朱 曼
(1.武漢理工大學 國家水運安全工程技術研究中心,武漢 430063;2.武漢理工大學 智能交通系統研究中心,武漢 430063;3.武漢理工大學 航運學院,武漢 430063;4.內河航運技術湖北省重點實驗室(武漢理工大學),武漢 430063)
船舶行為是指船舶在內部或外部條件影響下產生的活動。對船舶行為進行認知是分析和判斷水上交通態勢[1]的關鍵。從認知論的角度,作為一個時空對象,船舶行為本質上是對船舶時空位置及其關聯活動的語義理解[2]。傳統的船舶行為建模和分析側重于從船舶活動的時空數據出發,實現時間、空間維度的模式識別和表達。這種表達能夠準確地描述船舶在時空間的活動特征(如位置隨時間的變化,速度隨時間的變化等),但往往忽略了語義維度的信息挖掘和表達。如,當描述船舶在環境中的行為時,此時是船舶與環境進行的交互行為,單純從船舶軌跡的時空特征進行分析無法準確辨識船舶行為,需要融合航行環境的數據來對船舶軌跡進行輔助建模與表達,實現對船舶行為的深層認知。
目前,圍繞船舶行為的數據模型構建與軌跡的語義豐富兩方面,學者們開展了相應的研究。
基于軌跡數據驅動的船舶行為認知方面,主要包括通過船舶自動識別系統(automatic identification system,AIS)軌跡數據所反映的運動特征進行行為建模與基于軌跡的空間分布來挖掘船舶的典型活動模式及檢測異常行為兩方面。
在微觀層面,有學者采用軌跡特征建模的方式對船舶軌跡單元或基本行為進行建模及表達[3-4],但存在軌跡劃分方法不一致或劃分粒度較大而無法滿足細粒度行為分析的問題。有學者基于物體的運動特征提出了一種軌跡基元的劃分方法,并建立了基于軌跡基元的時間序列的行為模型[5],為船舶軌跡單元的劃分與行為建模提供了理論借鑒。
在宏觀層面,學者們注重于對船舶行為模式的挖掘研究。有學者通過船舶AIS數據對船舶軌跡進行聚類分析,挖掘船舶的運動模式及對異常軌跡進行識別[6-8]。這種基于統計學的方法通過對大規模船舶數據進行分析,可以區分出不同行為模式[9-11]的船舶,以及為船舶航行軌跡的預測提供依據。
在語義層,考慮到利用軌跡數據對船舶行為進行認知時會存在信息丟失,部分學者嘗試對軌跡進行了語義豐富[12-14],并探索行為的語義表達方法[15-16]。在此基礎上,結合機器學習與語義行為進行模式識別[17]與行為預測[18],在語義層對船舶行為進行了分析與挖掘,提高了海事監管人員對水上交通態勢的認知。
前人所做的工作在不同程度上提高了對船舶行為的認知,為機器自動辨識船舶行為提供了多種方法。但是還存在一些不足之處:
首先,基于數據驅動的船舶行為認知從智能識別的角度解決了對船舶當前所處航行狀態的智能識別,實現了對船舶軌跡在時空區域中的辨識。但是船舶軌跡受物理環境的約束,僅從時空角度對船舶軌跡進行認知無法對軌跡所隱含的物理意義進行表達。因此需要結合船舶所處的環境信息對船舶行為進行分析與描述。
其次,目前的行為語義分析大部分圍繞宏觀的軌跡特征進行語義分析與建模,很少對船舶語義單元構建進行研究,使得船舶行為在知識層的認知推理能力受到局限。
因此,針對軌跡分割與行為建模中存在的問題,提出了一種船舶行為的語義建模方法,探索了船舶行為語義基本單元的構建方法。首先,根據船舶的運動特征,提出原子行為的概念,將船舶軌跡劃分為10種軌跡單元;在此基礎上,將船舶軌跡劃分為原子軌跡,并融合航行的地理信息,計算原子軌跡與交通規則或基礎設施之間的空間拓撲關系,對船舶軌跡進行拓撲語義豐富。其次,結合原子行為與拓撲行為,對船舶的行為語義單元——交通行為,進行語義組合,構建船舶行為語義模型的基礎。最后,以港口為航行環境對船舶行為進行語義表達為例,驗證本文提出的模型與方法。
1 船舶行為的語義特征分析
船舶行為語義認知是通過模擬人類對船舶軌跡的思維架構來構建計算機對船舶軌跡的語義表達模型,圖1為船舶軌跡到船舶行為的語義建模框架。
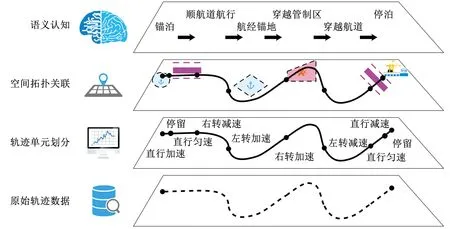
圖1 船舶軌跡到行為的語義建模框架Fig.1 Semantic modeling framework from ship trajectory to behavior
首先,船舶軌跡是由一連串動作組合而成,而相同的船舶動作在同樣的環境中可能表示不同的行為。如圖 1所示,直行勻速軌跡段與航道進行空間交互后可能表示船舶正在順航道航行,也可能表示船舶正在穿越航道。因此,需要對船舶軌跡進行動作劃分,對船舶軌跡單元進行建模,實現對船舶行為的抽象提取。船舶軌跡自身具有的運動特征可通過船舶AIS數據記錄的位置、速度與航向3個運動屬性對船舶運動的基本單元進行特征建模,劃分船舶的運動空間。
其次,考慮到船舶航行環境對船舶行為的影響,需要結合船舶航行環境的空間特征,對船舶軌跡運動單元與航行環境存在的交互特征進行建模,對船舶軌跡進行拓撲語義豐富,挖掘船舶軌跡中隱含的語義信息[14]。
最后,為了對船舶行為進行語義表達,需要對船舶的軌跡單元模型及其與航行環境的交互模型進行語義組合,實現對船舶行為的語義建模和語義表達。
2 船舶軌跡單元建模
軌跡被認為是在給定的時空區域中為實現某一目標的物體位置的演變記錄[4]。其中船舶軌跡T定義為每一時刻下位置序列對的有序組合。
T={(sl,tl),…,(sn,tn)}
(1)
式中:sl=(xl,yl),l∈[1,n],n為軌跡點的個數,sl是軌跡點的經緯度序列對,表示每個時間索引tl的軌跡點所在位置。xl與yl分別表示軌跡點的緯度值與經度值。
2.1 原子行為
定義1運動狀態向量:可以反應物體的運動狀態,包括停留、變速及轉向等狀態。
船舶的運動狀態向量用一個四元組來表征
pl={sl,vl,cl,tl}
(2)
式中vl為船對地航速,cl為船舶對地航向。
定義2船舶原子行為是指在一段時間內,船舶的運動狀態不發生變化的行為。
因此,船舶原子行為定義為
Ba={p1,p2,…,pm}
(3)
式中m為原子行為包含軌跡點的個數。原子行為對應的船舶軌跡即為原子軌跡,是由對應軌跡下每一個時刻下的船舶運動向量組成的有序集合。每個原子軌跡Ta都包含一個起始點與一個終止點,表示如式(4)所示:
(4)

根據船舶的運動狀態屬性,將船舶的原子行為根據位置是否變化、速度及航向是否發生變化兩特征劃分為10種類型,包括停止、直行加速及右轉減速等,見圖2。
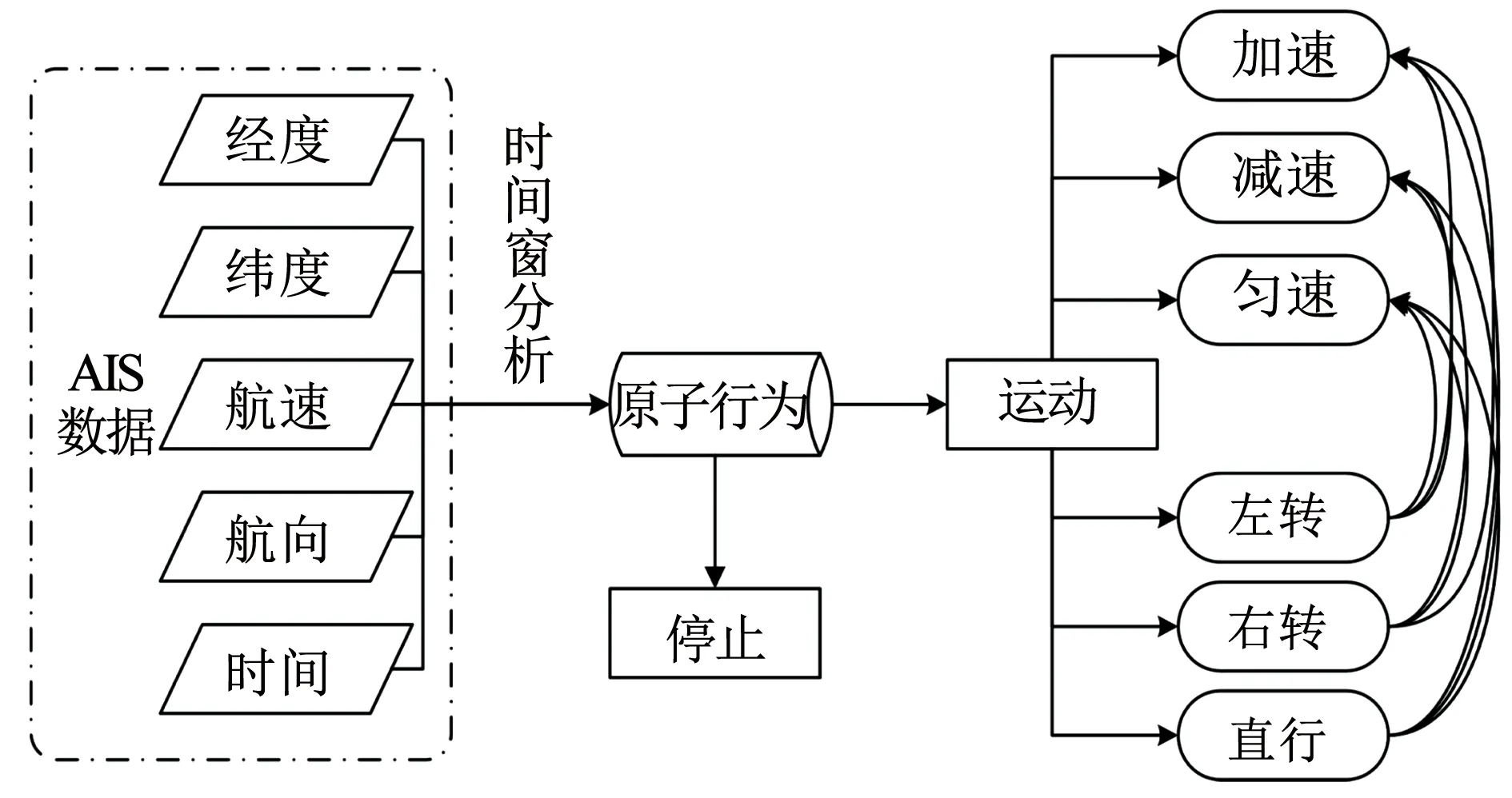
圖2 船舶原子行為劃分Fig.2 Classification of ship atomic behaviors
2.2 軌跡分割
為方便對船舶行為進行研究,將船舶軌跡視為在二維空間中的一系列點,利用船舶AIS數據實現船舶運動狀態向量的建模并進行軌跡的運動空間劃分。
通過劃分的10種原子行為來劃分船舶軌跡,任何時空軌跡都可被視為是軌跡運動單元的有序組合。因此,將船舶軌跡T劃分為p個包含起點與終點的原子軌跡,則軌跡T可以表示為
(5)

2.2.1 船舶運動向量定義
船舶航向差:

停留速度閾值:vε
加速度閾值:aε
單位航向差閾值:δ
2.2.2 原子軌跡的特征建模
根據原子行為及船舶運動狀態向量的定義,可對船舶原子軌跡進行特征建模,速度與航向的結合可用兩者參數相結合進行確定。
1)停留
(6)
式中:F{*}是Boolean函數,如果*為真,則F{*}=1,否則,F{*}=0。
2)運動
(7)
3)直行
(8)
4)轉向
(9)
5)變速
(10)
6)勻速
(11)
3 船舶拓撲行為語義表達
3.1 船舶拓撲行為
定義3船舶拓撲行為:船舶原子軌跡與航行環境中的交通規則或實體設施產生空間拓撲關系所隱含的語義行為。
(12)

基于維數擴展的9 交模型(DE-9IM)能夠很好地將兩個空間目標的交集是空、點、線或面4 種情況區分開[19],可用于分析船舶軌跡與航行環境之間的拓撲關系。

(13)
式中:?A表示A的內部,A°表示A的邊界,A-表示A的外部區域,維擴展9交模型分別計算了兩個空間實體3個區域之間的交集,得出DIM的值,值為0表示兩者相交結果為點,1表示兩者相交結果為線,2表示兩者相交結果為面,F表示兩者相交為空集。

(14)
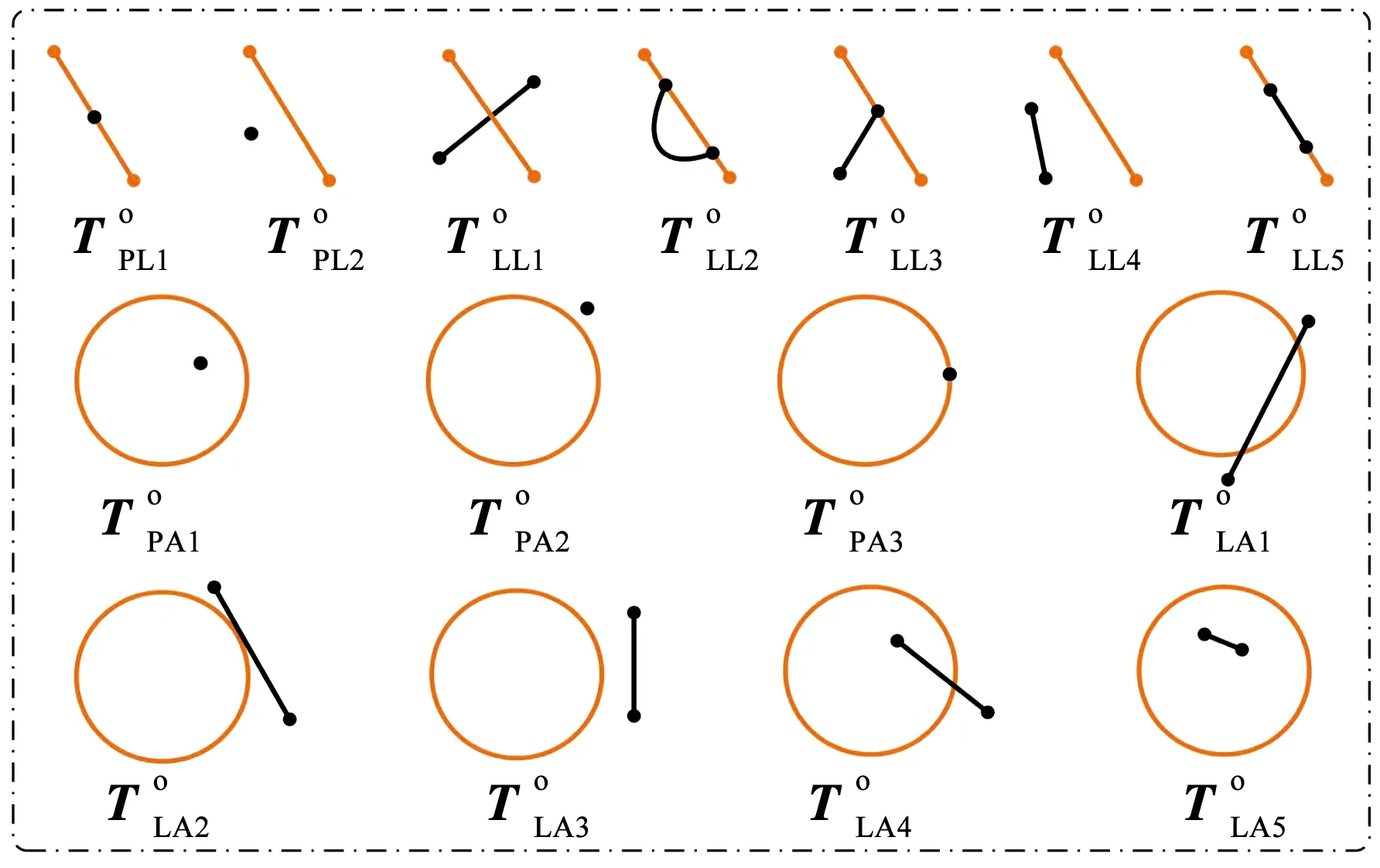
圖3 船舶與航行環境的空間拓撲關系Fig.3 Spatial topology relation representation between ship and navigation environment
3.2 基于空間拓撲計算的行為識別
在船舶原子軌跡對船舶軌跡進行劃分的基礎上,計算船舶原子軌跡與周圍環境中交通規則或基礎設施的拓撲關系,對船舶原子行為進行拓撲語義豐富。
3.2.1 地理空間建模
將船舶所處航行環境中的交通規則或基礎設施視為二維空間中的實體,包括點、線及面3種,根據實體的空間特征對實體進行數學建模。
1)點位置:p=(x0,y0),(x0,y0)是點的坐標。
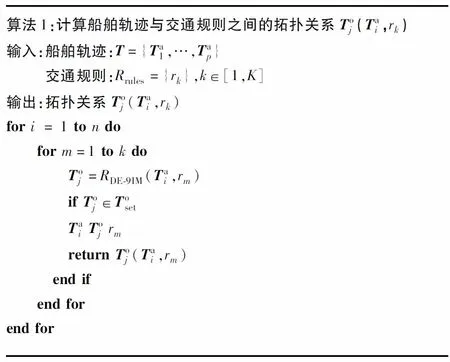
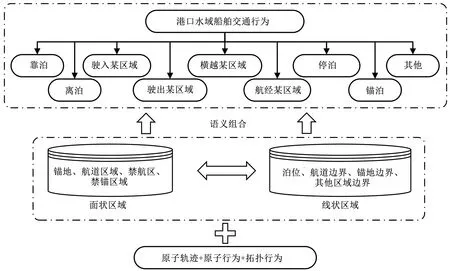
2)圓形區域建模:(x-x0)2+(y-y0)2 5)多邊形區域建模:對于由線段組成的閉合或非閉合水域,可以根據線段特征對多邊形區域構建線性方程組進行建模。 3.2.2 船舶拓撲關系計算 在對船舶航行環境進行數學建模的前提下,結合DE-9IM可對船舶軌跡與航行的環境進行空間拓撲計算。 根據DE-9IM對兩個空間實體拓撲計算的定義,對15種船舶拓撲行為對應的拓撲計算結果進行表示,見表1。 表1 船舶拓撲行為對應的計算矩陣Tab.1 Calculation matrix corresponding to topological behavior of ship 由于一條船舶軌跡包含了起始點與終止點,在計算空間拓撲關系時,不止需要計算軌跡段存在的拓撲關系,也需要計算起止點與周圍環境存在的拓撲關系。因此,船舶原子軌跡與航行環境中的交通規則或基礎設施之間進行空間拓撲計算之后一般都包含兩種或兩種以上拓撲行為。 為了對船舶軌跡進行拓撲語義豐富,在船舶原子軌跡劃分的基礎上,計算軌跡中每一段原子軌跡與周圍環境的空間拓撲關系,計算過程見算法1。 船舶原子行為與拓撲行為分別描述了船舶軌跡在時空中的運動特征與航行環境中交通規則或基礎設施的空間關系,描述了船舶的時空行為。但是同樣的原子行為與不同類型的空間實體之間的交互可能會表達不同的語義行為。如船舶原子軌跡與航道邊界有相交(intersection)關系,表示船舶可能發生駛入航道行為,也可能是發生駛出航道行為。因此需要結合原子行為與相應的拓撲行為來對船舶行為進行組合判斷。 定義4船舶交通行為是指船舶原子軌跡在航行環境中所表達的語義行為。交通行為作為船舶語義行為的基本單元,符合人類對船舶行為的認知基礎。船舶的復雜行為可由交通行為有序組合而成。 (15) 船舶交通行為的語義表達可參考句子的表達,如式(15)所示。假定交通行為表示為一個獨立的句子,則句子的主語是原子軌跡,謂語為拓撲行為,賓語為船舶所處的航行環境,狀語為原子行為,表示船舶的進行狀態,句子表達的意思即為交通行為。 如圖4所示,以某一港口為例,基于船舶行為語義模型探索船舶在具體的航行水域中行為的抽象提取與語義表達方法。 圖4 港口水域船舶軌跡與航行環境交互Fig.4 Interaction of ship trajectory and navigation environment in port waters 港口水域的交通規則或基礎設施主要包括錨地、航道、碼頭、禁航區等,對不同空間特征的航行區域進行特征建模。 1)線狀區域。港口水域單純的線狀區域較少,但是判斷船舶的交通行為時也需要對面狀區域包含的線段進行拓撲計算。線段用來對港口水域用直線段組成的區域進行建模,包括停泊區域、航道邊界以及多邊形區域的邊界等。船舶在單純線狀區域的交通行為包括3種:靠泊、離泊及停泊。 2)面狀區域。港口水域的大部分水域為圓形水域或被線段劃分的多邊形水域或半封閉區域,面狀水域包括錨地、航道及管制區域等。 船舶在面狀區域的交通行為包括駛入行為、駛出行為、航經行為以及橫越行為等。 在港口水域船舶交通行為劃分的基礎上,可對船舶交通行為進行形式化表達,如式(16)~(20)所示。 1)碼頭停泊、錨泊 (16) 2)靠泊、離泊行為 (17) 3)駛入、駛出行為 (18) 4)橫越行為 (19) 5)航經行為 (20) 如圖5所示,利用語義組合的方式對港口船舶交通行為進行建模,最終對行為進行形式化表達后,提高了船舶交通行為的語義表達能力,為探索大尺度的船舶行為奠定了基礎。 圖5 港口水域船舶行為語義單元建模Fig.5 Behavior semantic unit modeling of ship in port waters 1)模型定義了船舶原子行為、拓撲行為及交通行為的概念,對船舶軌跡的運動分割提供了新的思路與方法。利用原子軌跡作為軌跡單元計算船舶的拓撲行為、交通行為,并通過形式化的表達方法構建了3種行為的表達模型,構建了船舶語義行為的底層框架,為分析及推理深層次、大尺度的船舶行為提供支撐。 2)模型對行為進行了語義建模及表達,首先,模型考慮了船舶航行環境的空間特征,根據不同的空間特征對航行環境中的交通實體進行數學建模,利用維擴展9交模型對船舶原子軌跡與其進行空間拓撲計算,對船舶行為進行拓撲語義豐富;其次,利用船舶行為的語義描述,對船舶原子軌跡、原子行為及拓撲行為進行語義組合,實現了船舶交通行為的語義表達。 3)該模型對船舶行為進行了抽象提取與語義建模,下一步需要結合船舶的AIS數據與航行的具體場景,探索不同航行場景下船舶原子行為的語義構建標準,如停留時的速度閾值、船舶的轉向閾值等,進而通過構建船舶行為的本體模型,實現不同場景中船舶軌跡到行為的語義轉化,運行推理機,對船舶行為進行語義推理,辨識船舶的不同行為,對知識驅動的船舶行為檢測能力進行驗證。 4)在此基礎上,為了對不同時間、空間范圍內船舶行為進行自動監管,如“進港”“靠離泊”“錨泊”行為等,考慮到船舶行為的時空多尺度特性,需要對船舶不同時空尺度下的行為進行時序建模,構建不同行為間的時序關系。借助本體的知識表達能力,搭建船舶行為的時空多尺度表達模型,將海事領域中船舶行為的知識轉化為具體的本體模型,在語義層對船舶行為進行建模、計算及查詢,實現機器對船舶的“半自動”監管。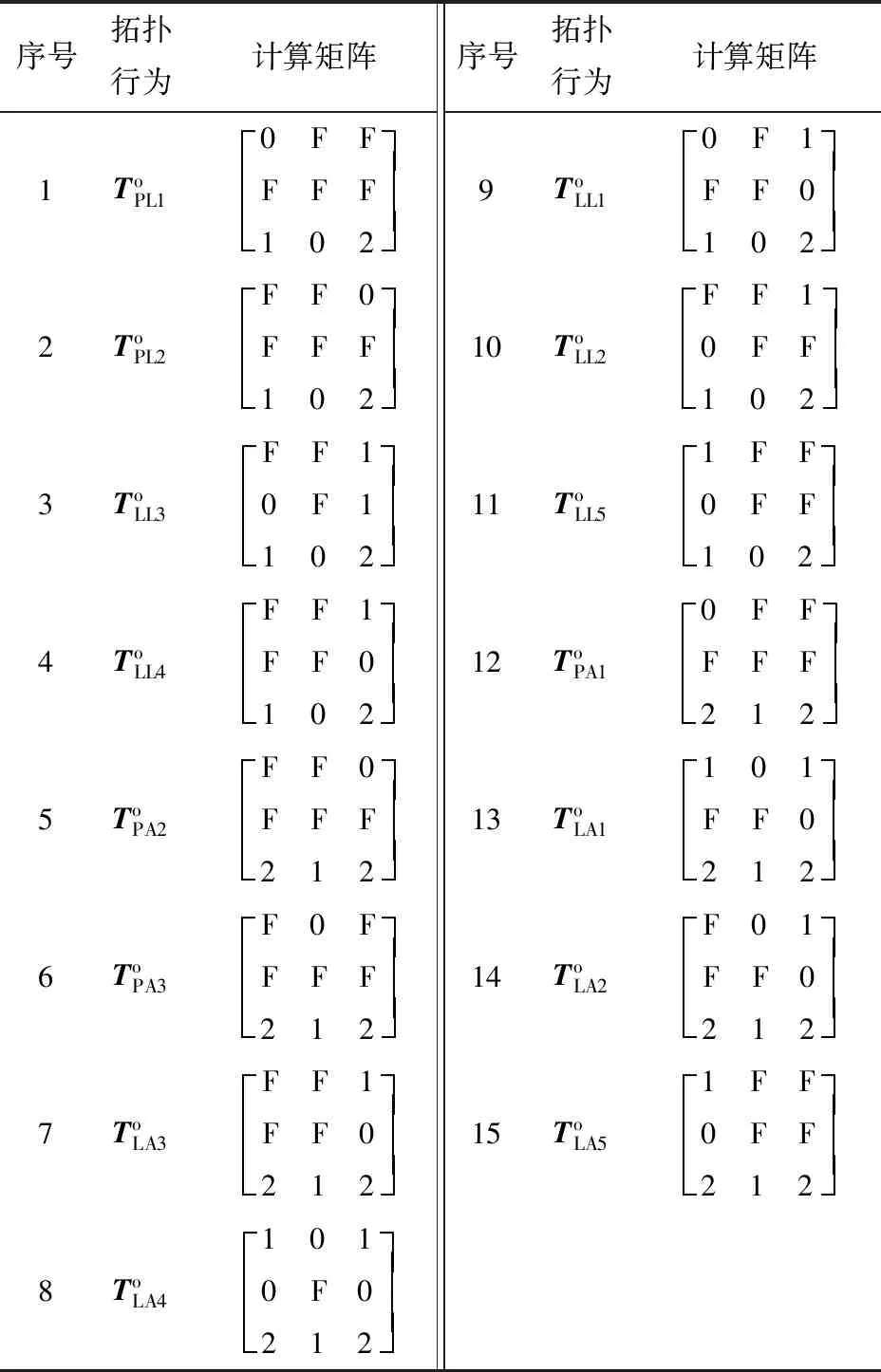
4 交通行為的語義表達
5 模型實例

5.1 港口水域地理空間建模
5.2 港口水域船舶交通行為的形式化表達





6 結 論
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
開放教育研究(2020年2期)2020-03-31 01:54:14
中國生殖健康(2020年6期)2020-02-01 06:28:50
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中國生殖健康(2019年11期)2019-01-07 01:28:02
現代語文(2016年21期)2016-05-25 13:13:44
大連民族大學學報(2015年2期)2015-02-27 08:28:11