基于STM32的紙和紙板彎曲挺度測(cè)定系統(tǒng)設(shè)計(jì)
2021-08-09 06:30:16佟向坤沈洪銳李燁
電子制作 2021年15期
關(guān)鍵詞:系統(tǒng)
佟向坤,沈洪銳,李燁
(1.廣東東軟學(xué)院,廣東佛山,528225;2.仲愷農(nóng)業(yè)工程學(xué)院,廣東廣州,510225)
0 引言
2020年1月,國(guó)家發(fā)改委、生態(tài)環(huán)境部發(fā)布《關(guān)于進(jìn)一步加強(qiáng)塑料污染治理的意見(jiàn)》[1],其中 “禁塑令”的頒布意味著包裝行業(yè)和造紙行業(yè)將迎來(lái)更加快速的發(fā)展,“以紙代塑,以紙代木”將成為“禁塑令”下的發(fā)展趨勢(shì)。僅以快遞業(yè)為例,2020年我國(guó)的快遞量已超過(guò)700億件,人均快件從 2000年的0.01件增長(zhǎng)到2020年的約50件[2]。根據(jù)全球性環(huán)保組織綠色和平發(fā)布數(shù)據(jù),按照材質(zhì)類型,快遞包裝可分為紙質(zhì)類和塑料類。2018年我國(guó)共消耗紙質(zhì)類快遞包裝材料856.05萬(wàn)噸,占總快遞包裝材料的90.95%。為了滿足包裝的需求,造紙行業(yè)和包裝行業(yè)對(duì)紙張的質(zhì)量要求越來(lái)越嚴(yán)格。彎曲挺度[3-7]是衡量紙和紙板的抗彎曲能力,與耐破、張力、壓縮等特性一樣,是用于評(píng)定紙和紙板使用性能的指標(biāo)之一。造紙行業(yè)和包裝行業(yè)勢(shì)必追求在滿足彎曲挺度指標(biāo)的前提下,讓定量和費(fèi)用達(dá)到最優(yōu)。研究基于STM32的紙和紙板彎曲挺度測(cè)定系統(tǒng),能夠自動(dòng)測(cè)定待測(cè)紙和紙板的彎曲挺度,反饋紙和紙板的使用性能,為紙和紙板的制造提供理論依據(jù),制造出更合適的紙和紙板。
1 系統(tǒng)設(shè)計(jì)方案
系統(tǒng)設(shè)計(jì)方案如圖1所示,系統(tǒng)包括輸入、最小系統(tǒng)以及輸出三部分,彎曲挺度儀示意圖如圖2所示,當(dāng)系統(tǒng)測(cè)定紙和紙板彎曲挺度時(shí),將試樣放入夾頭(圖2標(biāo)識(shí)5),系統(tǒng)通過(guò)繼電器控制氣動(dòng)閥門(mén)夾緊待測(cè)紙和紙板,依據(jù)參考文獻(xiàn)3的國(guó)家標(biāo)準(zhǔn)確保試樣位置準(zhǔn)確,通過(guò)力矩電機(jī)設(shè)定測(cè)定力矩(圖2標(biāo)識(shí)l的長(zhǎng)度),通過(guò)旋轉(zhuǎn)軸電機(jī)旋轉(zhuǎn)旋轉(zhuǎn)軸(圖2標(biāo)識(shí)4)改變彎曲角度,通過(guò)ADC采集模塊采集彎曲力測(cè)量裝置(圖2標(biāo)識(shí)1)中傳感器的數(shù)據(jù),并進(jìn)行數(shù)據(jù)的分析計(jì)算最終轉(zhuǎn)換成彎曲挺度值,實(shí)時(shí)顯示在屏幕上或通過(guò)打印機(jī)進(jìn)行打印。
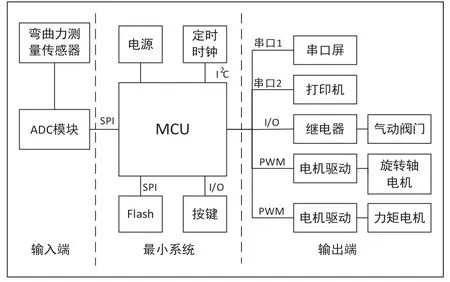
圖1 系統(tǒng)設(shè)計(jì)方案
圖2 中:標(biāo)識(shí)1表示彎曲力測(cè)量裝置,標(biāo)識(shí)2表示刀口,標(biāo)識(shí)3表示試樣,標(biāo)識(shí)4表示旋轉(zhuǎn)軸,標(biāo)識(shí)5標(biāo)識(shí)夾頭,標(biāo)識(shí)l表示彎曲長(zhǎng)度,標(biāo)識(shí)L表示自由長(zhǎng)度。
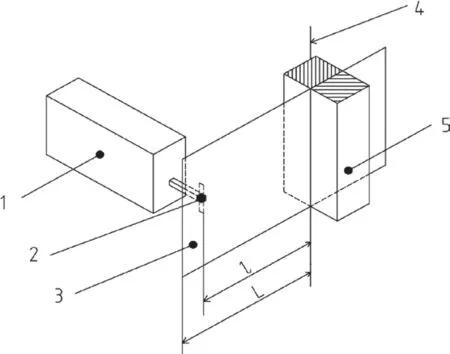
圖2 彎曲挺度儀示意圖
2 硬件設(shè)計(jì)
2.1 輸入
系統(tǒng)要求測(cè)量的彎曲挺度范圍為(0~500)mN.m,準(zhǔn)確度為50mN以下±0.6mN,其余±1%。為了滿足需求,彎曲力測(cè)量裝置(圖2標(biāo)示1)中選用2.0+0.004 mV/V靈敏度,3Kg量程的ST2拉壓力傳感器,ADC采集模塊采用國(guó)內(nèi)芯海科技(CHIPSEA)有限公司的CS1232芯片。CS1232是一款低成本,高精度的數(shù)據(jù)轉(zhuǎn)換器,適用于衡器儀表類小信號(hào)測(cè)量,并且兼具低噪聲和低功耗,無(wú)需外置放大電路,高達(dá)23.5位的高精度分辨率以及139nV-298nV的P-P噪聲能夠很好的滿足本系統(tǒng)的精確要求。ADC采集模塊[8,9]電路原理圖如圖3所示。
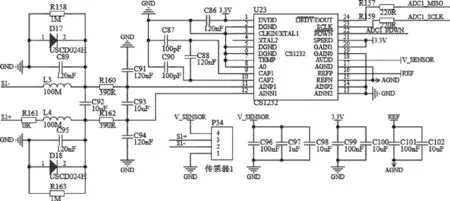
圖3 ADC模塊
2.2 最小系統(tǒng)
最小系統(tǒng)主要負(fù)責(zé)測(cè)定環(huán)境的控制以及彎曲挺度的測(cè)量,包括電源電路,STM32主控芯片,存儲(chǔ)電路,時(shí)鐘以及按鍵等幾部分組成。
2.2.1 電源電路
系統(tǒng)中各功能模塊需不同電壓供電,其中STM32的供電電壓為3.3V,壓力傳感器的供電電壓為5V,繼電器、電機(jī)驅(qū)動(dòng)電路、大彩屏屏幕的供電電壓為24V,系統(tǒng)的輸入電壓為24V,采用減壓法設(shè)計(jì)需要的各級(jí)電壓,如圖4所示。
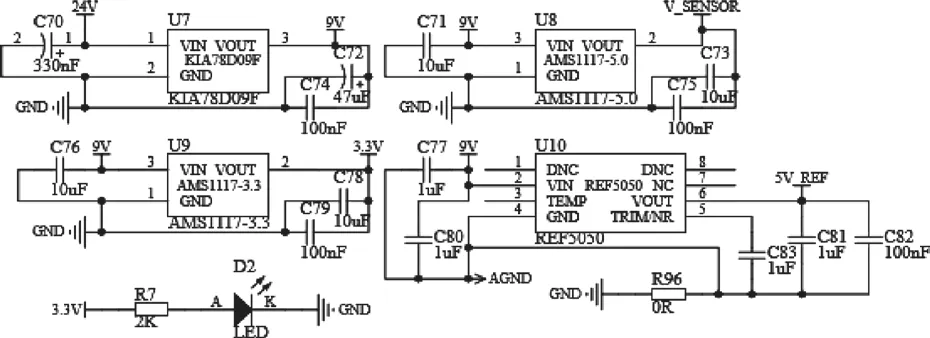
圖4 電源電路
U7為線性穩(wěn)壓器(LDO)芯片KIA78D09F,實(shí)現(xiàn)24V轉(zhuǎn)9V的固定輸出。該芯片紋波抑制好,可實(shí)現(xiàn)最大25V電壓輸入,最大1A電流輸出,因?yàn)樵撔酒妮敵鰧⒆鳛楹蠹?jí)降壓芯片的輸入,所以應(yīng)選用大功率輸出的穩(wěn)壓器。U8和U9為AMS1117系列穩(wěn)壓器,分別實(shí)現(xiàn)5V和3.3V的固定電壓輸出。AMS1117系列穩(wěn)壓器的優(yōu)點(diǎn)是其內(nèi)部提供過(guò)流保護(hù)和過(guò)熱保護(hù),以確保電源輸出的穩(wěn)定性。另外,該系列芯片提供先進(jìn)的修正技術(shù),以確保精度高達(dá)1%的穩(wěn)定電壓輸出。U10為T(mén)I公司的高精度基準(zhǔn)電壓源芯片REF5050,其作用是用于維持恒定的輸出電壓,即輸出電壓在環(huán)境溫度或輸入電壓等參數(shù)變化的情況下也能保持穩(wěn)定。
在該模塊的layout設(shè)計(jì)中特別需要注意各電源模塊間的地線處理,否則會(huì)帶來(lái)嚴(yán)重的噪聲干擾,影響電源穩(wěn)定性。本系統(tǒng)采取將各電源模塊及其負(fù)載分布在不同的區(qū)域,最后通過(guò)多電感并聯(lián)方式將地線連接。
2.2.2 中央控制芯片
中央控制芯片。本系統(tǒng)采用STM32F429IGT6芯片作為中央控制芯片,STM32F429IGT6是STM32[10]的高端產(chǎn)品,采用意法半導(dǎo)體先進(jìn)的90納米制程和新的設(shè)計(jì)方法,為增強(qiáng)型 ARM Cortex-M4內(nèi)核,內(nèi)置1MB閃存和256KB SRAM,具備運(yùn)行模式性能優(yōu)異而停止模式功耗低的特點(diǎn),能很好的滿足本系統(tǒng)的功能需求。
2.2.3 Flash存儲(chǔ)器
Flash存儲(chǔ)器。本系統(tǒng)采用W25Q128FV(128Mbit)型串行Flash存儲(chǔ)器,該存儲(chǔ)器面向受限于空間、引腳和功耗的系統(tǒng),提供了一種存儲(chǔ)解決方案。它們是代碼存儲(chǔ)、代碼直接通過(guò)雙線/四線SPI運(yùn)行、文本和數(shù)據(jù)的理想選擇。雙線/四線IO模式SPI,SPI時(shí)鐘頻率最高可達(dá)104MHz,因此在雙IO SPI模式下等效于208MHz,四IO SPI/QPI模式下等效于416MHz。此外,本存儲(chǔ)器還具備高效的“連續(xù)讀”和QPI模式,低電流消耗,寬溫度范圍以及高安全性等特點(diǎn),因此選擇此款存儲(chǔ)器作為本系統(tǒng)的存儲(chǔ)芯片。
2.3 輸出
輸出部分包括數(shù)據(jù)顯示和測(cè)定環(huán)境控制部分,數(shù)據(jù)顯示通過(guò)屏幕或者打印機(jī),控制部分包括力矩電機(jī)、旋轉(zhuǎn)軸電機(jī)(圖2標(biāo)識(shí)2所示)以及繼電器的控制,主要是保證測(cè)定環(huán)境符合測(cè)定標(biāo)準(zhǔn)。
系統(tǒng)采用大彩屏屏幕作為數(shù)據(jù)的顯示終端,大彩屏采用32位雙核處理器,內(nèi)嵌嵌入式實(shí)時(shí)操作系統(tǒng),集成了SDR顯存、圖片解碼、GUI操作等功能,使用2D加速引擎,配合各種特效效果,STM32只需通過(guò)串口指令便可輕松實(shí)現(xiàn)各種文本、圖片以及曲線的顯示,滿足本系統(tǒng)對(duì)顯示的要求。
系統(tǒng)要求提供6檔力臂,(50/25/20/15/10/5mm)精度精確到±0.1mm,因此力矩電機(jī)采用型號(hào)57J1854-828的電機(jī),其步距角1.8°,靜力距0.9N.cm,電機(jī)驅(qū)動(dòng)采用DM420數(shù)字式兩相步進(jìn)電機(jī)驅(qū)動(dòng)器,采用PI控制算法,低噪聲,低震動(dòng),性能優(yōu)越,能平穩(wěn)的驅(qū)動(dòng)步進(jìn)電機(jī)。系統(tǒng)要求彎曲時(shí)間在5~35s范圍內(nèi),彎曲角度(±7.5°或±15°)±0.3°(1~90°可調(diào)),因此旋轉(zhuǎn)軸電機(jī)采用型號(hào)57J1880-450的電機(jī),其步距角1.8°,步距角誤差±0.09°,靜力距2.2N.cm,電機(jī)驅(qū)動(dòng)采用2DM542驅(qū)動(dòng),2DM542采用最新的 32 位 ARM處理器進(jìn)行控制,用戶可根據(jù)需要自由配置,內(nèi)部編寫(xiě)先進(jìn)驅(qū)動(dòng)控制算法,能保證步進(jìn)電機(jī)在各速度段精準(zhǔn)、穩(wěn)定運(yùn)行,內(nèi)置細(xì)分算法能使電機(jī)在低轉(zhuǎn)速時(shí)平穩(wěn)運(yùn)行;中高速力矩補(bǔ)償算法,能最大限度的提高電機(jī)中高轉(zhuǎn)速時(shí)的轉(zhuǎn)矩[11]。電機(jī)控制部分原理圖如圖5所示。
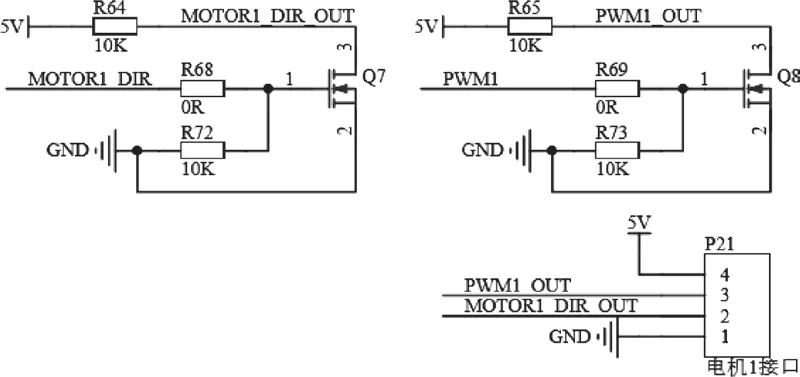
圖5 電機(jī)控制電路
3 軟件流程
測(cè)定彎曲挺度的流程如圖6所示。
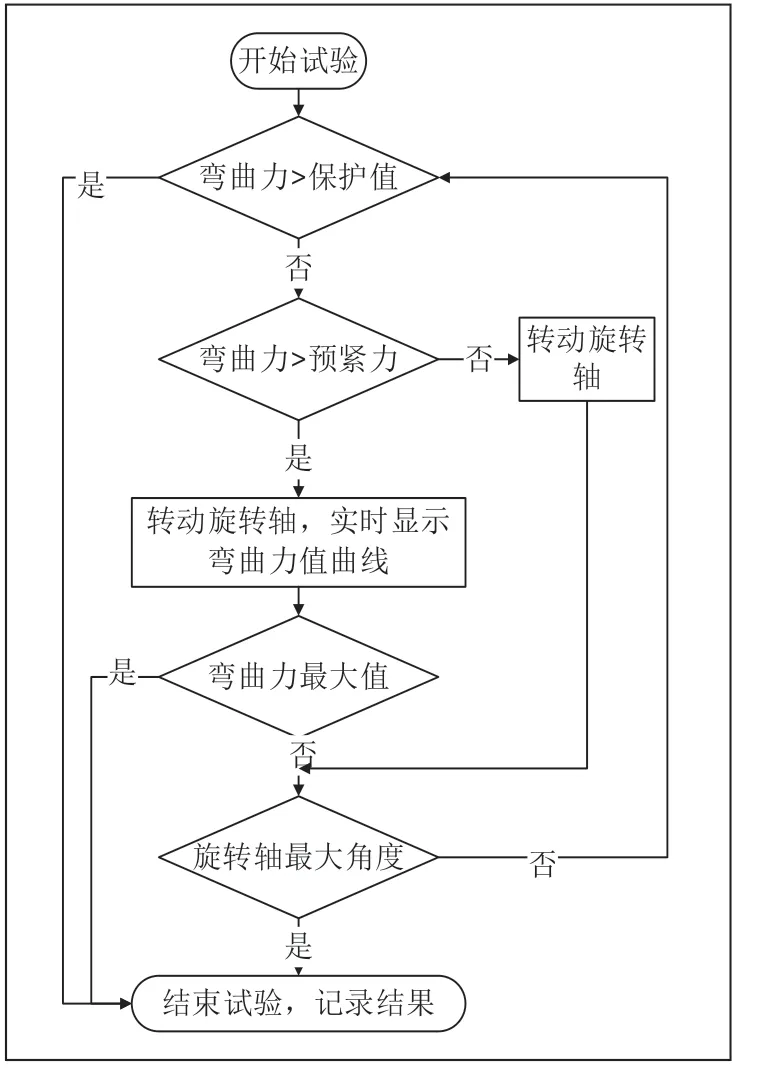
圖6 測(cè)定流程圖
在恒速?gòu)澢ㄖ校瑥澢Χ缺硎炯埡图埌逶趶椥宰冃畏秶鷥?nèi)受力彎曲時(shí)所需要的力。

式中:B1為彎曲挺度指數(shù),單位為牛頓六次方米每三次方克(N·m6/g3),B為彎曲挺度,單位為牛頓(N),g為試樣的定量,單位為克每平方米(g/m2)。只要計(jì)算彎曲挺度,便可通過(guò)式(1)求得彎曲挺度指數(shù)。
4 測(cè)定步驟及結(jié)果
4.1 試驗(yàn)步驟
本系統(tǒng)要求測(cè)定的彎曲挺度范圍為(0~500)mN.m,因此選用恒速?gòu)澢ǎ摲椒ㄟm用于彎曲挺度為20nN.m~10000mN.m的紙和紙板,測(cè)定原理是在50mm或10mm彎曲長(zhǎng)度下,將一端被夾持的試樣彎曲到規(guī)定角度所需的彎曲力的平均值表示彎曲挺度。試驗(yàn)步驟如下:
(1)按GB/T451.2紙和紙板定量的測(cè)定標(biāo)準(zhǔn)[12]選定測(cè)定試樣的定量。
(2)如圖2所示,自由長(zhǎng)度(L)選擇(57±3)mm,彎曲長(zhǎng)度(l)精確到(50.0±0.1)mm,將試樣放入夾頭,按標(biāo)準(zhǔn)GB/T 22364-2018對(duì)齊試樣并以規(guī)定的自由長(zhǎng)度伸出夾頭。
(3)夾持壓力應(yīng)足以保證牢固的夾持住試樣,并確保所測(cè)得的彎曲力不受夾持壓力的影響。
(4)將儀器的彎曲角度設(shè)定為15°,測(cè)試前,確保試驗(yàn)不受任何彎曲,確保刀口線與試樣表面接觸但不對(duì)試樣施加任何力,每個(gè)試樣只測(cè)定一次。
(5)如果在彎曲角度15°之前出現(xiàn)最大彎曲力,或在測(cè)試過(guò)程中出現(xiàn)斷裂、扭結(jié)或褶皺,該結(jié)果舍棄。如果超過(guò)10%的試樣出現(xiàn)這種情況,按標(biāo)準(zhǔn)將15°改為7.5°。
(6)測(cè)定時(shí)試樣正反面彎曲試驗(yàn)的數(shù)目應(yīng)相同。每個(gè)測(cè)定方向,至少測(cè)試10個(gè)試驗(yàn)并得到10組有效數(shù)據(jù)。
4.2 測(cè)定結(jié)果
試驗(yàn)對(duì)1mm、1.5mm、2mm以及2.5mm等四種紙板進(jìn)行測(cè)定,彎曲挺度值準(zhǔn)確度均在1%以內(nèi),彎曲角度±15°以內(nèi)誤差<0.3°,力矩50mm以內(nèi)誤差<0.1mm。試驗(yàn)過(guò)程部分界面如圖7所示,測(cè)定過(guò)程中橫縱坐標(biāo)范圍會(huì)根據(jù)測(cè)量數(shù)據(jù)范圍進(jìn)行適當(dāng)?shù)恼{(diào)整。
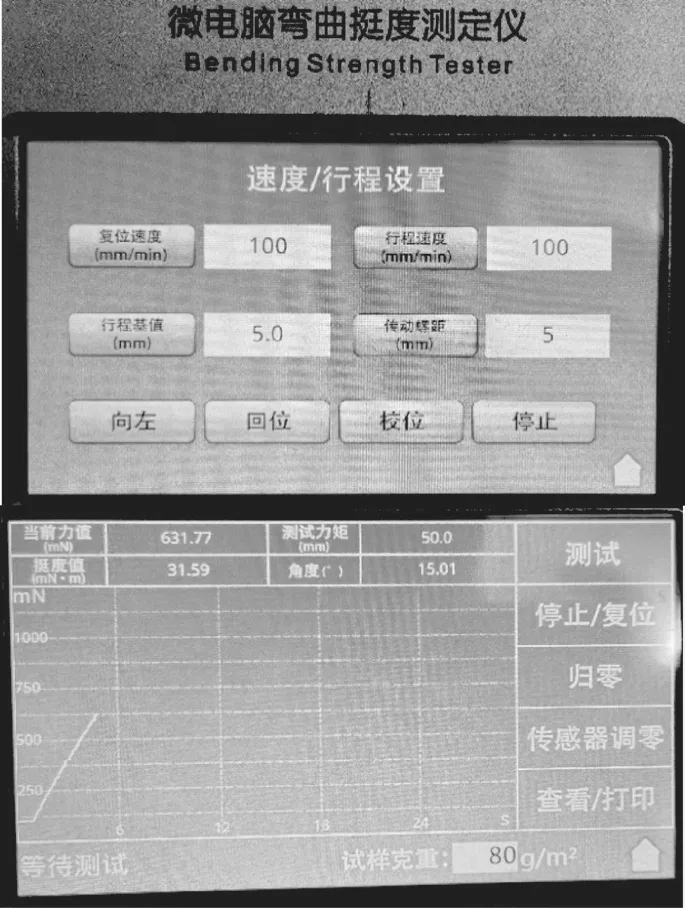
圖7 試驗(yàn)過(guò)程
5 結(jié)束語(yǔ)
本系統(tǒng)以STM32為主控芯片,設(shè)計(jì)了一種高精度的彎曲挺度測(cè)定系統(tǒng)。實(shí)驗(yàn)結(jié)果表明該系統(tǒng)的測(cè)定過(guò)程以及結(jié)果均符合紙和紙板彎曲挺度測(cè)定的相關(guān)標(biāo)準(zhǔn),能提供紙和紙板彎曲挺度的精準(zhǔn)測(cè)量。系統(tǒng)不僅可進(jìn)行數(shù)據(jù)處理和動(dòng)作控制,還能提供自動(dòng)復(fù)位、過(guò)載保護(hù),另外系統(tǒng)設(shè)有標(biāo)準(zhǔn)串行RS232接口,可擴(kuò)展上位機(jī)的綜合報(bào)表系統(tǒng)。通過(guò)對(duì)彎曲挺度的測(cè)定,能客觀反映紙和紙板的剛度和強(qiáng)度,側(cè)面展示抗凸出能力,保護(hù)程度。能夠更好的研究紙和紙板的生產(chǎn),提高制紙用品的使用范圍,生產(chǎn)出更加適合特定場(chǎng)合的紙和紙板,有廣泛的應(yīng)用前景。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
